理解 CNN
注意:下面提到的图像指位图
目录
CNN
卷积神经网络-CNN 最擅长的就是图片的处理。它受到人类视觉神经系统的启发。
CNN的两大特点:
- 能够有效的将大数据量的图片降维成小数据量
- 能够有效的保留图片特征,符合图片处理的原则
人类的视觉原理
详见:浅谈人类视觉系统与卷积神经网络(CNN)的联系和区别
深度学习的许多研究成果,离不开对大脑认知原理的研究,尤其是视觉原理的研究。
1981 年的诺贝尔医学奖,颁发给了 David Hubel(出生于加拿大的美国神经生物学家) 和TorstenWiesel,以及 Roger Sperry。前两位的主要贡献,是“发现了视觉系统的信息处理”,可视皮层是分级的。
人类的视觉原理如下:从原始信号摄入开始(瞳孔摄入像素 Pixels),接着做初步处理(大脑皮层某些细胞发现边缘和方向),然后抽象(大脑判定,眼前的物体的形状,是圆形的),然后进一步抽象(大脑进一步判定该物体是只气球)。下面是人脑进行人脸识别的一个示例:

其实对于我们看不同的物体也是类似的,在最底层基本上是类似的。先是看各种边缘,越往上,就越能提取出此类物体的一些特征(鼻子、眼睛、嘴巴),到最上层,不同的高级特征最终组合成相应的图像,从而能够让人类准确区分不同的物体。这种逐层提取信息的方式就是许多深度学习算法(包括CNN)的灵感来源。
后面我们就来通过对几个层的讲解来对CNN有进一步的了解。
几个关键层
典型的CNN一般由3个部分构成:
- 卷积层
- 池化层
- 全连接层
| 名称 | 作用简述 |
|---|---|
| 卷积层 | 提取图像特征 |
| 池化层 | 降维、防止过拟合 |
| 全连接层 | 输出结果 |
卷积层(fliter、kernel)
在这部分我们来看一下卷积的过程。假设我们要提取出下面这个 5 × 5 5 \times 5 5×5 的矩阵的特征(其实位图图像存储底层就是通过这种矩阵的方式存储的,不过位图一般有r、g、b三层的矩阵信息)。

同时我们定义一个 3 × 3 3 \times 3 3×3的矩阵,在CNN中其实被称作 filter 或 kernel 或 feature detector。

ok有了前面一个输入矩阵和 kernel 矩阵的定义,我们可以观察下图看看, kernel是如何对输入矩阵的特征进行提取的。其实很简单,就是每次将 kernel中的元素与输入矩阵中的每个元素对应相乘然后累加,得到 Convolved Feature 中的一个元素。

针对上述例子的附加解释,顺便讲解一下
torch.nn.Conv1d的参数 :
in_channels(输入通道数): 前面提到了我们的输入矩阵是只有一个,其实对应的就是in_channels = 1,如果说是那种位图信息输入包含r、g、b三层矩阵信息的话 in_channels = 3。
out_channels(输出通道数): 卷积产生的通道。有多少个 out_channels,就需要多少一个1维卷积。例如上图中只输出了一个 Convoled Feature所以 out_channels = 1。
stride(步长): 卷积步长其实指的就是 kernel 在与输入矩阵进行计算的时候,每次移动的步数,这里stride = 1。这可以理解为一个动态的过程,可以观察上图, kernel每次移动都是向一个方向平移一格。
kernel_size(核的大小): kernel_size指的就是 kernel的大小。上面对应的是一个二维的卷积,kernel_size = (3 * 3)。
padding: 输入的每一条边补充0的层数。换一个说法就是,我们比较案例中的Image和Convolved Feature的维度,因为卷积的时候是没加padding的所以让卷积后维度下降。如果我们设置padding = 1, 作用就是在进行卷积的时候,会先对Image的最外一圈用0去扩充。可以让最后得到的卷积的结果与原始Image一致。
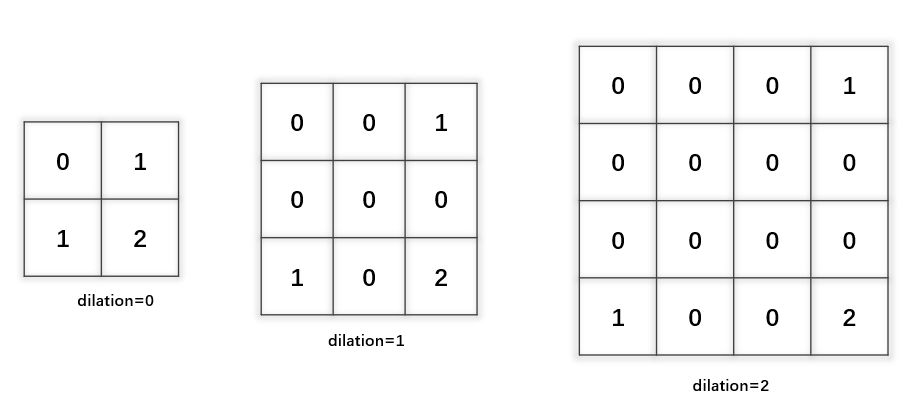
dilation(卷积核膨胀): 卷积核的膨胀,设置的是卷积核元素的间隔,如下图所示:
groups: 从输入通道到输出通道的阻塞连接数。当groups=1的时候,假设此时 输入的通道数为n,输出的通道数为m,那么理解为把输入的通道分成1组(不分组),每一个输出通道需要在所有的输入通道上做卷积,也就是一种参数共享的局部全连接。如果把groups改成2,可以理解为把 输入的通道分成两组,此时每一个输出通道只需要在其中一组上做卷积。如果groups=in_channels,也就是把 输入的通道分成in_channels组(每一组也就一个通道),此时每一个输出通道只需要在其中一个输入通道上做卷积。
bias: 如果bias = True,则添加偏置,偏置就是用来在卷积得到的结果后加上一个项,以调整整个数据的区间。因为卷积的结果后面是要输入到激活层的嘛,我们可以通过下图看bias对这个数据的影响。其实本质的意思就是有了偏置项让数据整体分布上有了平移的效果,从而根激活函数更好地配合起来。
用例
import torch import torch.nn as nn d = torch.Tensor(3, 5) conv = nn.Conv1d( in_channels=3, out_channels=2, kernel_size=2, padding=1, stride=2, bias=True, ) print(d) print(conv.weight) print(conv(d)) """ ## Output ## 因为torch.nn中设置的卷积核(kernel)内的数据是随机的,运行的时候输出可能会不一样但数据的维度应当是一样的 tensor([[4.9592e-39, 4.2246e-39, 1.0286e-38, 1.0653e-38, 1.0194e-38], [8.4490e-39, 1.0469e-38, 9.3674e-39, 9.9184e-39, 8.7245e-39], [9.2755e-39, 8.9082e-39, 9.9184e-39, 8.4490e-39, 9.6429e-39]]) Parameter containing: tensor([[[ 0.3349, 0.2759], [-0.0143, -0.3235], [-0.2177, -0.0688]], [[ 0.2330, 0.3502], [-0.3834, -0.0521], [-0.1585, 0.3144]]], requires_grad=True) tensor([[-0.0977, -0.0977, -0.0977], [-0.2637, -0.2637, -0.2637]], grad_fn=<SqueezeBackward1>) """


卷积后得到 OutPutShape
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Qcf7pu33-1669972715833)(https://raw.githubusercontent.com/yuyuyu258963/pic-go-picStore/main/%E5%8D%B7%E7%A7%AFOutputShape%E8%AE%A1%E7%AE%97.png)]
我们可以通过下图的例子进一步理解卷积的过程。

池化层 (pooling)
池化层(Pooling)是卷积神经网络中另一个重要的概念,它实际上是一种形式的降采样。有多种不同形式的非线性池化函数,而其中“最大池化(Max pooling)”是最为常见的。它是将输入的图像划分为若干个矩形区域,对每个子区域输出最大值。直觉上,这种机制能够有效地原因在于,在发现一个特征之后,它的精确位置远不及它和其它特征的相对位置的关系重要。池化层会不断地减小数据的空间大小,因此参数的数量和计算量也会下降,这在一定程度上也控制了过拟合。通常来说,CNN的卷积层之间都会周期性地插入池化层。
池化层通常会分别作用域每个输入的特征并减小其大小。当前最常用形式的池化层是每隔2个元素从图像划分出 2 × 2 2 \times 2 2×2的区块,然后对每个区块中的4个数取最大值。这将会减少75%的数据量。

池化的作用
池化操作后的结果相比其输入缩小了。池化层的引入是仿照人的视觉系统对视觉输入对象进行降维和抽象。在卷积神经网络过去的工作中,研究者普遍认为池化层有如下三个功效:
- 特征不变性:池化操作是模型更加关注是否存在某些特征而不是特征具体的位置
- 特征降维:池化相当于在空间范围内做了维度约减,从而使模型可以抽取更加广阔的特征。同时减少了下一层的输入大小,进而减少计算量和参数个数
- 在一定程度上防止过拟合:更方便优化
用例
import numpy as np
import torch
d = np.array([[1.0,0.0,1.0,2.0,3.0,4.0]])
input = torch.from_numpy(d)
print(input)
"""ouput
tensor([[1., 0., 1., 2., 3., 4.]], dtype=torch.float64)
"""
import torch.nn.functional as F
ouput = F.max_pool1d(input, kernel_size = 2, stride = 1)
print(ouput)
ouput = F.avg_pool1d(input, kernel_size = 2, stride = 1)
print(ouput)
"""ouput
tensor([[1., 1., 2., 3., 4.]], dtype=torch.float64)
tensor([[0.5000, 0.5000, 1.5000, 2.5000, 3.5000]], dtype=torch.float64)
"""
上述的用例中展示了,最大池化(MaxPooling)和平均池化(AvgPooling)的用例。因为池化也涉及到这个子区域的选择嘛,所以里面的一些参数就和前面的
torch.nn.Conv1d中的参数很类似。
激活层(activate)
激活层里面其实就是激活函数,就是在人工神经网络的神经元上运行的函数,负责将神经元的输入映射到输出端。
激活函数对于人工神经网络模型去学习、理解非常复杂和非线性的函数来说具有非常重要的作用。它们将给线性特性引入到我们的网络中。引入激活函数是为了增加神经网络模型的非线性。没有激活函数的每层都相当于矩阵相乘。就算你叠加了若干层之后,无非还是个矩阵相乘罢了。
下面是一张关于常见激活函数的表:

全连接层(Linear)
全连接层在整个CNN网络中起到“分类器”的作用。如果说前面的卷积层、池化层和激活函数等操作是将原始数据映射到隐层特征空间,全连接层起到的将学到的特征表示映射到样本的标记空间的作用。
全连接层实现原理

在卷积神经网络的最后,往往会出现一两层全连接层,全连接一般会把卷积输出的二维特征图转化为一维的向量。如上图中最后两列表示的就是两个全连接层,在最后一层卷积结束后,进行了最后一次池化,输出了20个 12 × 12 12 \times 12 12×12的图像,然后通过了一个全连接层变成了 1 × 100 1 \times 100 1×100的向量。这么一看前面的工作我么做的就是一个降维的操作,然后我们将得到的向量输入全连接层进行输出。
用例
input = torch.Tensor(1, 10)
linear = nn.Linear(10, 2)
print(input)
print(linear(input))
"""output
tensor([[5.1429e-39, 4.5000e-39, 4.9592e-39, 4.2246e-39, 1.0286e-38, 1.0653e-38,
1.0194e-38, 8.4490e-39, 1.0469e-38, 9.3674e-39]])
tensor([[-0.1961, 0.2197]], grad_fn=<AddmmBackward0>)
"""
比如用例中我们可能在前面得到了一个一百维的向量,然后这个任务的是一个二分类的任务。我们就可以设置通过全连接层输出的向量维度为(1,2)。其中的2与二分类任务对应。上面输出的
tensor([[-0.1961, 0.2197]],那么一般来说我们认为这个得到的分类结果是第2类。
pytorch实现TextCNN
class TextCNN(nn.Module):
def __init__(self, vocab_size, embedding_dim, kernel_sizes, num_channels, dropout, vectors=None):
super(TextCNN, self).__init__()
self.word_embeddings = nn.Embedding(vocab_size, embedding_dim) # embedding之后的shape: torch.Size([200, 8, 300])
if vectors is not None:
self.word_embeddings = self.word_embeddings.from_pretrained(vectors, freeze=False)
# dropout 代表每个神经元不被激活的概率
self.dropout = nn.Dropout(dropout)
self.decoder = nn.Linear(sum(num_channels), 2)
# 时序最大池化层没有权重,所以可以共用一个实例
self.pool = F.GlobalMaxPool1d()
self.convs = nn.ModuleList([
nn.Sequential(
nn.Conv1d(
in_channels = embedding_dim,
out_channels = c,
kernel_size = k
),
nn.ReLU(),
nn.MaxPool1d(2, padding=1),
)
for c, k in zip(num_channels, kernel_sizes)
]) # 创建多个一维卷积层
def forward(self, sentence):
embeds = self.word_embeddings(sentence)
embeds = embeds.permute(0, 2, 1)
# 对于每个一维卷积层,在时序最大池化后会得到一个形状为(批量大小, 通道大小, 1)的
# Tensor。使用flatten函数去掉最后一维,然后在通道维上连结
encoding = torch.cat([self.pool(conv(embeds)).squeeze(-1) for conv in self.convs], dim=1)
# 应用丢弃法后使用全连接层得到输出
outputs = self.decoder(self.dropout(encoding))
return outputs
卷积传播图解
先来看得到卷积的过程

(单个元素的梯度计算)不考虑前后的层,比如我们已经得到了Delta Output的梯度矩阵,可以观察下图如何得到在原矩阵中 x 2 , 2 x_{2,2} x2,2的梯度值。

(推广到全部元素) 这里就是对Delta d做了一个padding之后然后反向做了卷积。

不同视角看CNN
这部分图来自:https://cloud.tencent.com/developer/article/1594092
比如有原始数据矩阵:

filter

得到的Convoled Feature:

卷积计算的视角

等式计算角度

网络角度

矩阵乘法角度

Dense神经网络角度

在这个角度下我们可以更好地理解传统神经网络和CNN之间的联系,其中左图是传统神经网络,右图数Dense神经网络视角下的CNN。灰度连接对应于不可训练的0.
参考
- 多视角理解CNN
- 神经网络中偏置的作用
- 卷积核膨胀解析
- PyTorch 中文文档
- https://easyai.tech/ai-definition/cnn/
![[附源码]JAVA毕业设计机房预约系统(系统+LW)](https://img-blog.csdnimg.cn/6d1443d06f64410ca995f97ceffa0cfb.png)




![php万年历源代码!源代码![上一年、上一月、下一月、下一年、附加当天日期加背景颜色]-私聊源码](https://img-blog.csdnimg.cn/d4b168e82c414a2f85f8ee4015d51b5c.png)