内容系听课复习所做笔记,图例多来自课程截图
连续分配管理方式

连续分配:指为用户进程分配的必须是一个连续的内存空间
相应地,非连续分配可以是离散的
对于固定分区分配,需要有一个分区说明表,类似下表:
| 分区号 | 大小(MB) | 起始地址 | 状态 |
|---|---|---|---|
| 1 | 2 | 8 | 未分配 |
| 2 | 2 | 10 | 已分配 |
| 3 | 4 | 12 | 已分配 |
当某用户程序要装入内存时,由操作系统内核程序根据用户程序大小检索该表,从中找到一个能满足大小的、未分配的分区,将之分配给该程序,然后修改状态为“已分配”。
动态分区分配的诸多问题
- 使用什么样的数据结构记录内存使用情况
- 当多个空闲分区都能满足需求时,应该选择哪个分区进行分配
- 如何进行分区的分配与回收操作
记录内存使用情况的数据结构
分为两种:
- 空闲分区表(长得跟上面那个表挺像,有分区号、分区大小、分区起始位置等)
- 空闲分区链(是双向链表)
动态分区分配算法
把一个新作业装入内存时,须按照一定的动态分区分配算法,从空闲分区表(或空闲分区链)中选出一个分区分配给该作业。由于分配算法算法对系统性能有很大的影响,因此人们对它进行了广泛的研究。

首次适应算法
实现方式:空闲分区以地址递增的次序排列。每次分配内存时按顺序查找(从地址最小的空闲分区开始)空闲分区链(或空闲分区表),找到首个大小能满足要求的空闲分区。
当然,分配完之后肯定要修改原空闲分区表(链)的数据,比如把第二个分区(大小4MB)分配给一个需要3MB空间的进程,那么分区表就得把第二个分区大小改为1MB。
最佳适应算法
算法思想:由于动态分区分配是一种连续分配方式,为各进程分配的空间必须是连续的一整片区域。因此为了保证当“大进程”到来时能有连续的大片空间,可以尽可能多地留下大片的空闲区
原则就是:优先使用更小的空闲区
如何实现:空闲分区按容量递增次序排列。每次分配内存时顺序查找空闲分区链(或空闲分区表),找到大小能满足要求的第一个空闲分区。
找到的必然是满足需要的最小的空闲分区
缺点:每次都选最小的分区进行分配会留下越来越多的、很小的、难以利用的内存块(因为用来分配的空闲分区大小不总是和需要的空间大小相同,因此总会留下空余的、更小的新的空闲空间)。因此这种方法会产生很多的外部碎片。
最坏适应算法
又称:最大适应算法(Largest Fit)
算法思想:为了解决最佳适应算法的问题――即留下太多难以利用的小碎片,可以在每次分配时优先使用最大的连续空闲区,这样分配后剩余的空闲区就不会太小,更方便使用。
如何实现:空闲分区按容量递减次序链接。每次分配内存时顺序查找空闲分区链(或空闲分区表),找到大小能满足要求的第一个空闲分区。
如果分配时第一个空闲分区都不能满足需要,那后面的也不用看了,肯定不行
缺点:每次都选最大的分区进行分配,虽然可以让分配后留下的空闲区更大、更可用,但是这种方式会导致较大的连续空闲区被迅速用完。如果之后有“大进程”到达,就没有内存分区可用了。
邻近适应算法
算法思想:首次适应算法每次都从链头开始查找的。这可能会导致低地址部分出现很多小的空闲分区,而每次分配查找时,都要经过这些分区,因此也增加了查找的开销。如果每次都从上次查找结束的位置开始检索,就能解决上述问题。
如何实现:空闲分区以地址递增的顺序排列(可排成一个循环链表)。每次分配内存时从上次查找结束的位置开始查找空闲分区链(或空闲分区表),找到大小能满足要求的第一个空闲分区。
首次适应算法每次都要从头查找,每次都需要检索低地址的小分区。但是这种规则也决定了当低地址部分有更小的分区可以满足需求时,会更有可能用到低地址部分的小分区,也会更有可能把高地址部分的大分区保留下来(最佳适应算法的优点)
邻近适应算法的规则可能会导致无论低地址、高地址部分的空闲分区都有相同的概率被使用,也就导致了高地址部分的大分区更可能被使用(划分为小分区),最后导致无大分区可用(最大适应算法的缺点)
总结
最佳适应和最坏适应是有额外开销的,即对空闲空间的按大小进行排序;但是首次适应和邻近适应没有。
| 算法 | 思想 | 分区排列顺序 | 优点 | 缺点 |
|---|---|---|---|---|
| 首次适应 | 从头到尾找适合的分区 | 空闲分区以地址递增次序排列 | 综合看性能最好。算法开销小,回收分区后一般不需要对空闲分区队列重新排序 | |
| 最佳适应 | 优先使用更小的分区,以保留更多大分区 | 空闲分区以容量递增次序排列 | 会有更多的大分区被保留下来,更能满足大进程需求 | 会产生很多太小的、难以利用的碎片;算法开销大,回收分区后可能需要对空闲分区队列重新排序 |
| 最坏适应 | 优先使用更大的分区,以防止产生太小的不可用的碎片 | 空闲分区以容量递减次序排列 | 可以减少难以利用的小碎片 | 大分区容易被用完,不利于大进程;算法开销大(原因同上) |
| 邻近适应 | 由首次适应演变而来,每次从上次查找结束位置开始查找 | 空闲分区以地址递增次序排列(可排列成循环链表) | 不用每次都从低地址的小分区开始检索。算法开销小(原因同首次适应算法) | 会使高地址的大分区也被用完 |
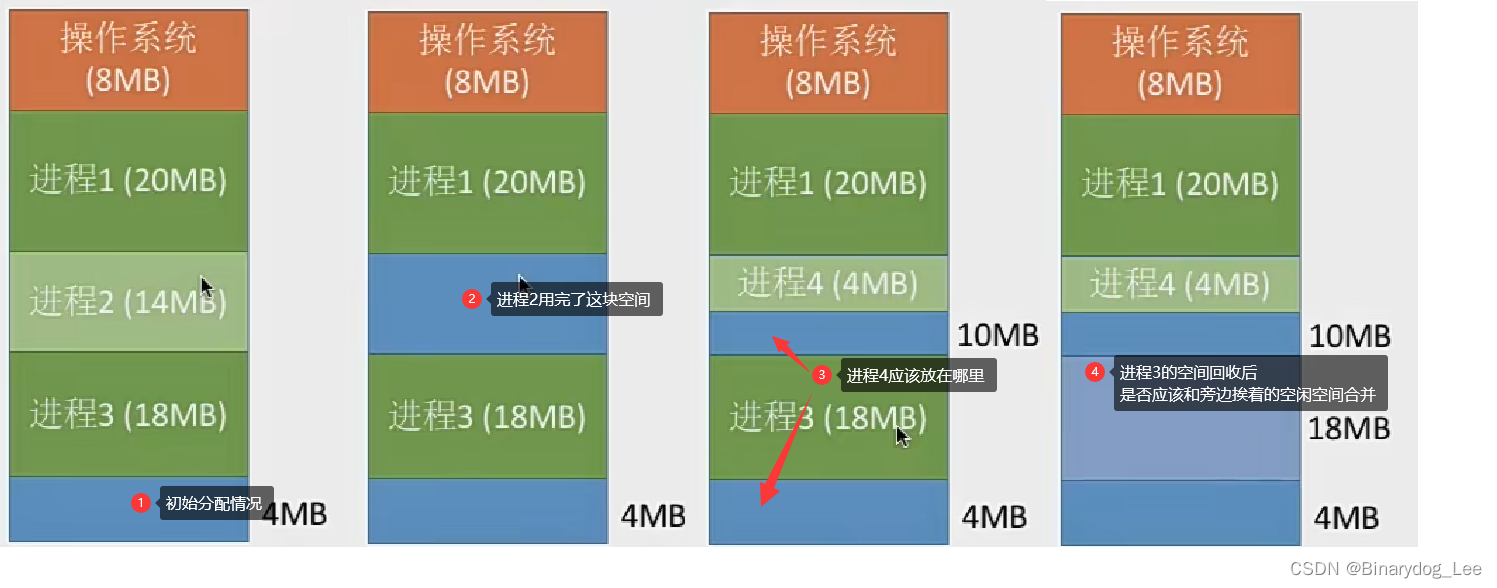
如何进行分区的分配与回收
分配:如果采用分区表,就得修改其中条目(分区大小和起始地址),如果一整条记录对应的分区都被分配了,那么就删掉这条记录(因为记录是要记录空闲的)
回收:如果回收的空间挨着(分为前边挨着、后边挨着和前后两边都挨着)已记录的空闲空间,就得在记录中将之合并;如果回收区的前后均未邻接空闲分区,则应增加(新建)记录
看好了啊,回收一共是四种情况:前边挨着、后边挨着、前后两边都挨着和前后两边都不挨着空闲空间
总而言之的原则就是相邻的空闲区间要合并
分区表各表项的顺序不一定按照地址递增顺序排列,具体的排列方式需要依据动态分区分配算法来确定。
内部碎片和外部碎片
内部碎片:分配给某进程的内存区域中,如果有些部分没有用上。
外部碎片:是指内存中的某些空闲分区由于太小而难以利用。
如果内存中空闲空间的总和本来可以满足某进程的要求,但由于进程需要的是一整块连续的内存空间,因此这些“碎片”不能满足进程的需求。
可以通过紧凑技术(或称拼凑技术, Compaction)来解决外部碎片
| 技术 | 性质 |
|---|---|
| 单一连续分配 | 无外部碎片,有内部碎片 |
| 固定分区分配 | 无外部碎片,有内部碎片 |
| 动态分区分配 | 无内部碎片,有外部碎片 |