1、 没找到。 就是个变量。
#define DEVICE_INTR do_hd
2、 哪里用到 setup((void *) &drive_info);
sys_setup
[403页]
9-3 hd.c程序
9-3-1 功能描述
hd.c程序是硬盘控制器驱动程序,提供对硬盘控制器块设备的读写驱动和硬盘初始化处理。
程序中所有函数按照功能可 分为5类:
(1)初始化硬盘和设置硬盘所用数据结构信息的函数,如sys_setup()和hd_init()。
(2)向硬盘控制器发送命令的函数hd_out()。
(3)处理硬盘当前请求项的函数do_hd_request()。
(4)硬盘中断处理过程中调用的C函数,如read_intr()、write_intr()、bad_rw_intr()和 recal_intr()。do_hd_request()函数也将在read_intr()和write_intr()中被调用。
(5)硬盘控制器操作辅助函数,如controler_ready()、drive_busy()、win_result()、hd_out()和 reset_controler()等。
sys_setup()
sys_setup()函数利用boot/setup.S程序提供的信息对系统中所含硬盘驱动器的参数进行了设置。然后读取硬盘分区表,并尝试把启动引导盘上的虚拟盘根文件系统映像文件复制到内存虚拟盘中,若成功则加载虚拟盘中的根文件系统,否则就继续执行普通根文件系统加载操作。
/* 下面该函数只在初始化时被调用一次。用静态变量callable作为可调用标志。*/
// 系统设置函数。
// 函数参数BIOS是由初始化程序init/main.c中init子程序设置为指向硬盘参数表结构的指针。
// 该硬盘参数表结构包含2个硬盘参数表的内容(共32字节),是从内存0x90080处复制而来。
// 0x90080处的硬盘参数表是由setup.s程序利用ROM BIOS功能取得。硬盘参数表信息参见程序
// 列表后的说明。 本函数主要功能是读取 CMOS和硬盘参数表信息,用于设置硬盘分区结构hd,
// 并尝试加载RAM虚拟盘和根文件系统。
int sys_setup(void * BIOS)
{
static int callable = 1; // 限制本函数只能被调用1次的标志。
int i,drive;
unsigned char cmos_disks;
struct partition *p;
struct buffer_head * bh;
// 首先设置callable标志,使得本函数只能被调用1次。然后设置硬盘信息数组hd_info[]。
// 如果在 include/linux/config.h 文件中已定义了符号常数HD_TYPE,那么 hd_info[]数组
// 已经在前面第49行上设置好了。否则就需要读取boot/setup.s程序存放在内存0x90080处
// 开始的硬盘参数表。setup.s程序在内存此处连续存放着一到两个硬盘参数表。
if (!callable)
return -1;
callable = 0;
#ifndef HD_TYPE // 如果没有定义HD_TYPE,则读取。
for (drive=0 ; drive<2 ; drive++) {
hd_info[drive].cyl = *(unsigned short *) BIOS; // 柱面数。
hd_info[drive].head = *(unsigned char *) (2+BIOS); // 磁头数。
hd_info[drive].wpcom = *(unsigned short *) (5+BIOS); // 写前预补偿柱面号。
hd_info[drive].ctl = *(unsigned char *) (8+BIOS); // 控制字节。
hd_info[drive].lzone = *(unsigned short *) (12+BIOS); // 磁头着陆区柱面号。
hd_info[drive].sect = *(unsigned char *) (14+BIOS); // 每磁道扇区数。
BIOS += 16; // 每个硬盘参数表长16字节,这里BIOS指向下一表。
}
// setup.s程序在取BIOS硬盘参数表信息时,如果系统中只有1个硬盘,就会将对应第2个
// 硬盘的16字节全部清零。因此这里只要判断第2个硬盘柱面数是否为0就可以知道是否有
// 第2个硬盘了。
if (hd_info[1].cyl)
NR_HD=2;
else
NR_HD=1;
#endif
// 到这里,硬盘信息数组hd_info[]已经设置好,并且确定了系统含有的硬盘数NR_HD。现在
// 开始设置硬盘分区结构数组hd[]。该数组的项0和项5 分别表示两个硬盘的整体参数,而
// 项1—4和6—9分别表示两个硬盘的4个分区的参数。 因此这里仅设置表示硬盘整体信息
// 的两项(项0和5)。
for (i=0 ; i<NR_HD ; i++) {
hd[i*5].start_sect = 0; // 硬盘起始扇区号。
hd[i*5].nr_sects = hd_info[i].head*
hd_info[i].sect*hd_info[i].cyl; // 硬盘总扇区数。
}
/*
我们对CMOS有关硬盘的信息有些怀疑:可能会出现这样的情况,
我们有一块SCSI/ESDI/等的控制器,它是以ST-506方式与BIOS
相兼容的,因而会出现在我们的BIOS参数表中,但却又不是寄存
器兼容的,因此这些参数在CMOS中又不存在。
另外,我们假设ST-506驱动器(如果有的话)是系统中的基本驱
动器,也即以驱动器1或2出现的驱动器。
第1个驱动器参数存放在CMOS字节0x12的高半字节中,第2个
存放在低半字节中。该4位字节信息可以是驱动器类型,也可能
仅是0xf。0xf表示使用CMOS中0x19字节作为驱动器1的8位
类型字节,使用CMOS中0x1A字节作为驱动器2的类型字节。
总之,一个非零值意味着硬盘是一个AT控制器兼容硬盘。
*/
// 这里根据上述原理,下面代码用来检测硬盘到底是不是AT控制器兼容的。有关CMOS信息
// 请参见第4章中4.2.3.1节。这里从CMOS偏移地址0x12处读出硬盘类型字节。如果低半
// 字节值(存放着第2个硬盘类型值)不为0,则表示系统有两硬盘,否则表示系统只有1
// 个硬盘。如果0x12处读出的值为0,则表示系统中没有AT兼容硬盘。
if ((cmos_disks = CMOS_READ(0x12)) & 0xf0)
if (cmos_disks & 0x0f)
NR_HD = 2;
else
NR_HD = 1;
else
NR_HD = 0;
// 若NR_HD = 0,则两个硬盘都不是AT控制器兼容的,两个硬盘数据结构全清零。
// 若NR_HD = 1,则将第2个硬盘的参数清零。
for (i = NR_HD ; i < 2 ; i++) {
hd[i*5].start_sect = 0;
hd[i*5].nr_sects = 0;
}
// 好,到此为止我们已经真正确定了系统中所含的硬盘个数NR_HD。现在我们来读取每个硬盘
// 上第1个扇区中的分区表信息,用来设置分区结构数组hd[] 中硬盘各分区的信息。首先利
// 用读块函数bread()读硬盘第1个数据块(fs/buffer.c,第267行),第1个参数(0x300、
// 0x305 )分别是两个硬盘的设备号,第2个参数(0)是所需读取的块号。若读操作成功,
// 则数据会被存放在缓冲块bh的数据区中。若缓冲块头指针bh为0,则说明读操作失败,则
// 显示出错信息并停机。否则我们根据硬盘第1个扇区最后两个字节应该是0xAA55来判断扇
// 区中数据的有效性,从而可以知道扇区中位于偏移0x1BE开始处的分区表是否有效。若有效
// 则将硬盘分区表信息放入硬盘分区结构数组hd[]中。最后释放bh缓冲区。
for (drive=0 ; drive<NR_HD ; drive++) {
if (!(bh = bread(0x300 + drive*5,0))) {// 0x300、0x305是设备号。
printk("Unable to read partition table of drive %d\n\r",
drive);
panic("");
}
if (bh->b_data[510] != 0x55 || (unsigned char)
bh->b_data[511] != 0xAA) {// 判断硬盘标志0xAA55。
printk("Bad partition table on drive %d\n\r",drive);
panic("");
}
p = 0x1BE + (void *)bh->b_data;// 分区表位于第1扇区0x1BE处。
for (i=1;i<5;i++,p++) {
hd[i+5*drive].start_sect = p->start_sect;
hd[i+5*drive].nr_sects = p->nr_sects;
}
brelse(bh);// 释放为存放硬盘数据块而申请的缓冲区。
}
// 现在再对每个分区中的数据块总数进行统计,并保存在硬盘分区总数据块数组hd_sizes[]中。
// 然后让设备数据块总数指针数组的本设备项指向该数组。
for (i=0 ; i<5*MAX_HD ; i++)
hd_sizes[i] = hd[i].nr_sects>>1 ;
blk_size[MAJOR_NR] = hd_sizes;
// 现在总算完成设置硬盘分区结构数组hd[]的任务。如果确实有硬盘存在并且已读入其分区
// 表,则显示“分区表正常”信息。然后尝试在系统内存虚拟盘中加载启动盘中包含的根文
// 件系统映像(blk_drv/ramdisk.c,第71行)。即在系统设置有虚拟盘的情况下判断启动盘
// 上是否还含有根文件系统的映像数据。如果有(此时该启动盘称为集成盘)则尝试把该映像
// 加载并存放到虚拟盘中,然后把此时的根文件系统设备号ROOT_DEV修改成虚拟盘的设备号。
// 接着再对交换设备进行初始化。最后安装根文件系统。
if (NR_HD)
printk("Partition table%s ok.\n\r",(NR_HD>1)?"s":"");
rd_load(); // blk_drv/ramdisk.c,第71行。
init_swapping(); // mm/swap.c,第199行。
mount_root(); // fs/super.c,第241行。
return (0);
}
hd_init()
hd_init()函数用于在内核初始化时设置硬盘控制器中断描述符,并复位硬盘控制器中断屏蔽码,以允许硬盘控制器发送中断请求信号。
// 硬盘系统初始化。
// 设置硬盘中断描述符,并允许硬盘控制器发送中断请求信号。
// 该函数设置硬盘设备的请求项处理函数指针为do_hd_request(),然后设置硬盘中断门描述
// 符。hd_interrupt(kernel/sys_call.s,第235行)是其中断处理过程地址。 硬盘中断号
// 为int 0x2E(46),对应8259A芯片的中断请求信号IRQ13。接着复位接联的主8259A int2
// 的屏蔽位,允许从片发出中断请求信号。再复位硬盘的中断请求屏蔽位(在从片上),允许
// 硬盘控制器发送中断请求信号。中断描述符表IDT内中断门描述符设置宏set_intr_gate()
// 在include/asm/system.h中实现。
void hd_init(void)
{
blk_dev[MAJOR_NR].request_fn = DEVICE_REQUEST; // do_hd_request()。
set_intr_gate(0x2E,&hd_interrupt); // 设置中断门中处理函数指针。
outb_p(inb_p(0x21)&0xfb,0x21); // 复位接联的主8259A int2的屏蔽位。
outb(inb_p(0xA1)&0xbf,0xA1); // 复位硬盘中断请求屏蔽位(在从片上)。
}
hd_out()
hd_out()是硬盘控制器操作命令发送函数。该函数带有一个中断过程中调用的C函数指针参数,在向控制器发送命令之前,它首先使用这个参数预置好中断过程中会调用的函数指针(do_hd,例如read_intr()),然后它按照规定的方式依次向硬盘控制器0x1f0~0x1f7端口发送命令参数块,随后就立即退出函数返回而并不会等待硬盘控制器执行读写命令。除控制器诊断(WIN_DIAGNOSE)和建立驱动器参数(WIN_SPECIFY)两个命令以外,硬盘控制器在接收到任何其他命令并执行了命令以后,都会向CPU发出中断请求信号,从而引发系统去执行硬盘中断处理过程(在system_call.s,211行)。
向硬盘控制器发送命令块。
// 参数:drive - 硬盘号(0-1);nsect - 读写扇区数;sect - 起始扇区;
// head - 磁头号; cyl - 柱面号; cmd - 命令码(见控制器命令列表);
// intr_addr() - 硬盘中断处理程序中将调用的C处理函数指针。
// 该函数在硬盘控制器就绪之后,先设置全局指针变量do_hd为硬盘中断处理程序中将调用的
// C处理函数指针。然后再发送硬盘控制字节和7字节的参数命令块。
// 该函数在硬盘控制器就绪之后,先设置全局函数指针变量do_hd指向硬盘中断处理程序中将会
// 调用的C处理函数,然后再发送硬盘控制字节和7字节的参数命令块。硬盘中断处理程序的代
// 码位于kernel/sys_call.s程序第235行处。
// 第191行定义1个寄存器变量__res。该变量将被保存在1个寄存器中,以便于快速访问。
// 如果想指定寄存器(如eax),则我们可以把该句写成“register char __res asm("ax");”。
static void hd_out(unsigned int drive,unsigned int nsect,unsigned int sect,
unsigned int head,unsigned int cyl,unsigned int cmd,
void (*intr_addr)(void))
{
register int port asm("dx");// 定义局部寄存器变量并放在指定寄存器dx中。
// 首先对参数进行有效性检查。如果驱动器号大于1(只能是0、1)或者磁头号大于15,则程
// 序不支持,停机。否则就判断并循环等待驱动器就绪。如果等待一段时间后仍未就绪则表示
// 硬盘控制器出错,也停机。
if (drive>1 || head>15)
panic("Trying to write bad sector");
if (!controller_ready())
panic("HD controller not ready");
// 接着我们设置硬盘中断发生时将调用的C函数指针do_hd(该函数指针定义在blk.h文件的
// 第56--109行之间,请特别留意其中的第83行和100行)。然后在向硬盘控制器发送参数
// 和命令之前,规定要先向控制器命令端口(0x3f6)发送一指定硬盘的控制字节,以建立相
// 应的硬盘控制方式。该控制字节即是硬盘信息结构数组中的 ctl 字段。然后向控制器端口
// 0x1f1–0x1f7发送7字节的参数命令块。
SET_INTR(intr_addr); // do_hd = intr_addr在中断中被调用。
outb_p(hd_info[drive].ctl,HD_CMD); // 向控制寄存器输出控制字节。
port=HD_DATA; // 置dx为数据寄存器端口(0x1f0)。
outb_p(hd_info[drive].wpcom>>2,++port); // 参数:写预补偿柱面号(需除4)。
outb_p(nsect,++port); // 参数:读/写扇区总数。
outb_p(sect,++port); // 参数:起始扇区。
outb_p(cyl,++port); // 参数:柱面号低8位。
outb_p(cyl>>8,++port); // 参数:柱面号高8位。
outb_p(0xA0|(drive<<4)|head,++port); // 参数:驱动器号+磁头号。
outb(cmd,++port); // 命令:硬盘控制命令。
}
do_hd_request()
do_hd_request()是硬盘请求项的操作函数。其操作流程如下:
(1)首先判断当前请求项是否存在,若当前请求项指针为空,则说明目前硬盘块设备已经没有待处理的请求项,因此立刻退出程序。这是在宏INIT_REQUEST中执行的语句。否则就继续处理当前请求项。
(2)对当前请求项中指明的设备号和请求的盘起始扇区号的合理性进行验证。
(3)根据当前请求项提供的信息计算请求数据的磁盘磁道号、磁头号和柱面号。
(4)如果复位标志(reset)已被设置,则也设置硬盘重新校正标志(recalibrate),并对硬盘执行复位操作,向控制器重新发送"建立驱动器参数"命令(WIN_SPECIFY)。该命令不会引起硬盘中断。
(5)如果重新校正标志被置位的话,就向控制器发送硬盘重新校正命令(WIN_RESTORE),并在发送之前预先设置号该命令引发的中断中需要执行的C函数(recal_intr()),并退出。
recal_intr()函数的主要作用是:当控制器执行该命令结束并引发中断时,能重新(继续)执行本函数。
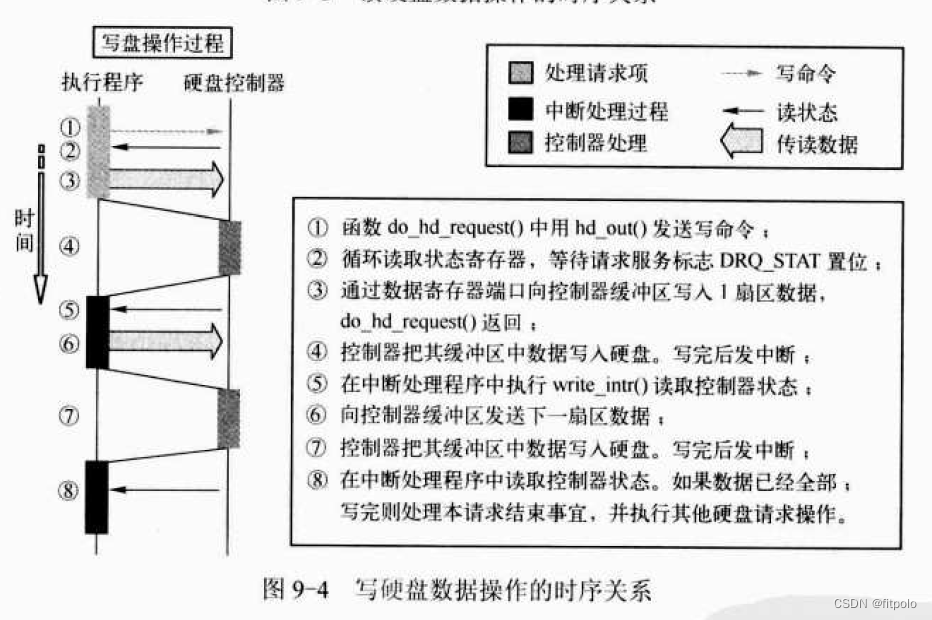
(6)如果当前请求项指定是写操作,则首先设置硬盘控制器调用的C函数为write_intr(),向控制器发送写操作的命令参数块,并循环查询控制器的状态寄存器,以判断请求服务标志(DRQ)是否置位。若该标志置位,则表示控制器已"同意"接收数据,于是接着就把请求项所指缓冲区中的数据写入控制器的数据缓冲区中。若循环查询超时后该标志仍然没有置位,则说明此次操作失败。于是调用bad_rw_intr()函数,根据处理当前请求项发生的出错次数来确定是放弃当前请求项还是需要设置复位标志,重新处理当前请求项。
(7)如果当前请求项是读操作,则设置硬盘控制器调用的C函数为read_intr(),并向控制器发生读盘操作命令。
执行硬盘读写请求操作。
// 该函数根据设备当前请求项中的设备号和起始扇区号信息首先计算得到对应硬盘上的柱面号、
// 当前磁道中扇区号、磁头号数据,然后再根据请求项中的命令(READ/WRITE)对硬盘发送相应
// 读/写命令。 若控制器复位标志或硬盘重新校正标志已被置位,那么首先会去执行复位或重新
// 校正操作。
// 若请求项此时是块设备的第1个(原来设备空闲),则块设备当前请求项指针会直接指向该请
// 求项(参见ll_rw_blk.c,28行),并会立刻调用本函数执行读写操作。否则在一个读写操作
// 完成而引发的硬盘中断过程中,若还有请求项需要处理,则也会在硬盘中断过程中调用本函数。
// 参见kernel/sys_call.s,235行。
void do_hd_request(void)
{
int i,r;
unsigned int block,dev;
unsigned int sec,head,cyl;
unsigned int nsect;
// 函数首先检测请求项的合法性。若请求队列中已没有请求项则退出(参见blk.h,127行)。
// 然后取设备号中的子设备号(见列表后对硬盘设备号的说明)以及设备当前请求项中的起始
// 扇区号。子设备号即对应硬盘上各分区。如果子设备号不存在或者起始扇区大于该 分区扇
// 区数-2,则结束该请求项,并跳转到标号repeat处(定义在INIT_REQUEST开始处)。因为
// 一次要求读写一块数据(2个扇区,即1024字节),所以请求的扇区号不能大于分区中最后
// 倒数第二个扇区号。然后通过加上子设备号对应分区的起始扇区号,就把需要读写的块对应
// 到整个硬盘的绝对扇区号block上。而子设备号被5整除即可得到对应的硬盘号。
INIT_REQUEST;
dev = MINOR(CURRENT->dev);
block = CURRENT->sector; // 请求的起始扇区。
if (dev >= 5*NR_HD || block+2 > hd[dev].nr_sects) {
end_request(0);
goto repeat; // 该标号在blk.h最后面。
}
block += hd[dev].start_sect;
dev /= 5; // 此时dev代表硬盘号(硬盘0还是硬盘1)。
// 然后根据求得的绝对扇区号block和硬盘号dev,我们就可以计算出对应硬盘中的磁道中扇
// 区号(sec)、所在柱面号(cyl) 和磁头号(head)。 下面嵌入的汇编代码即用来根据硬
// 盘信息结构中的每磁道扇区数和硬盘磁头数来计算这些数据。计算方法为:
// 310--311行代码初始时eax是扇区号block,edx中置0。divl指令把edx:eax组成的扇区
// 号除以每磁道扇区数(hd_info[dev].sect),所得整数商值在eax中,余数在edx中。其
// 中eax中是到指定位置的对应总磁道数(所有磁头面),edx中是当前磁道上的扇区号。
// 312--313行代码初始时eax是计算出的对应总磁道数,edx中置0。divl指令把edx:eax
// 的对应总磁道数除以硬盘总磁头数(hd_info[dev].head),在eax中得到的整除值是柱面
// 号(cyl),edx中得到的余数就是对应得当前磁头号(head)。
__asm__("divl %4":"=a" (block),"=d" (sec):"0" (block),"1" (0),
"r" (hd_info[dev].sect));
__asm__("divl %4":"=a" (cyl),"=d" (head):"0" (block),"1" (0),
"r" (hd_info[dev].head));
sec++;
nsect = CURRENT->nr_sectors; // 对计算所得当前磁道扇区号进行调整。
// 此时我们得到了欲读写的硬盘起始扇区block所对应的硬盘上柱面号(cyl)、在当前磁道
// 上的扇区号(sec)、磁头号(head)以及欲读写的总扇区数(nsect)。 接着我们可以根
// 据这些信息向硬盘控制器发送I/O操作信息了。 但在发送之前我们还需要先看看是否有复
// 位控制器状态和重新校正硬盘的标志。通常在复位操作之后都需要重新校正硬盘磁头位置。
// 若这些标志已被置位,则说明前面的硬盘操作可能出现了一些问题,或者现在是系统第一
// 次硬盘读写操作等情况。 于是我们就需要重新复位硬盘或控制器并重新校正硬盘。
// 如果此时复位标志reset是置位的,则需要执行复位操作。复位硬盘和控制器,并置硬盘
// 需要重新校正标志,返回。reset_hd()将首先向硬盘控制器发送复位(重新校正)命令,
// 然后发送硬盘控制器命令“建立驱动器参数”。
if (reset) {
recalibrate = 1; // 置需重新校正标志。
reset_hd();
return;
}
// 如果此时重新校正标志(recalibrate)是置位的,则首先复位该标志,然后向硬盘控制
// 器发送重新校正命令。该命令会执行寻道操作,让处于任何地方的磁头移动到0柱面。
if (recalibrate) {
recalibrate = 0;
hd_out(dev,hd_info[CURRENT_DEV].sect,0,0,0,
WIN_RESTORE,&recal_intr);
return;
}
// 如果以上两个标志都没有置位,那么我们就可以开始向硬盘控制器发送真正的数据读/写
// 操作命令了。如果当前请求是写扇区操作,则发送写命令,循环读取状态寄存器信息并判
// 断请求服务标志DRQ_STAT是否置位。DRQ_STAT是硬盘状态寄存器的请求服务位,表示驱
// 动器已经准备好在主机和数据端口之间传输一个字或一个字节的数据。这方面的信息可参
// 见程序前面的硬盘操作读/写时序图。如果请求服务DRQ置位则退出循环。 若等到循环结
// 束也没有置位,则表示发送的要求写硬盘命令失败,于是跳转去处理出现的问题或继续执
// 行下一个硬盘请求。否则我们就可以向硬盘控制器数据寄存器端口HD_DATA写入1个扇区
// 的数据。
if (CURRENT->cmd == WRITE) {
hd_out(dev,nsect,sec,head,cyl,WIN_WRITE,&write_intr);
for(i=0 ; i<10000 && !(r=inb_p(HD_STATUS)&DRQ_STAT) ; i++)
/* nothing */ ;
if (!r) {
bad_rw_intr();
goto repeat;// 该标号在blk.h文件最后面。
}
port_write(HD_DATA,CURRENT->buffer,256);
// 如果当前请求是读硬盘数据,则向硬盘控制器发送读扇区命令。若命令无效则停机。
} else if (CURRENT->cmd == READ) {
hd_out(dev,nsect,sec,head,cyl,WIN_READ,&read_intr);
} else
panic("unknown hd-command");
}
write_intr()
write_intr()是在当前请求项是写操作时被设置成中断过程调用的C函数。控制器完成写盘命令后会立刻向CPU发生中断请求信号,于是在控制器写操作完成后立刻调用该函数。
该函数首先调用win_result()函数,读取控制器的状态寄存器,以判断是否有错误发生。若在写盘操作时发生了错误,则调用bad_rw_intr(),根据处理当前请求项发生的出错次数来确定是放弃当前请求项还是需要设置复位标志,以继续重新处理当前请求项。若没有发送错误,则根据当前请求项中指明的需写扇区总数,判断是否已经把此请求项要求的所有数据写盘了。若还有数据需要写盘,则使用port_write()函数再
把一个扇区的数据复制到控制器缓冲区中。若数据已经全部写盘,则调用end_request()函数来处理当前请求项的结束事宜:唤醒等待本请求项完成的进程、唤醒等待空闲请求项的进程(若有的话)、设置当前请求项所指缓冲区数据已更新标志、释放当前请求项(从块设备链表中删除该项)。最后继续调用do_hd_request()函数,以继续处理硬盘设备的而其他请求项。
写扇区中断调用函数。
// 该函数将在硬盘写命令结束时引发的硬盘中断过程中被调用。函数功能与read_intr()类似。
// 在写命令执行后会产生硬盘中断信号,并执行硬盘中断处理程序,此时在硬盘中断处理程序
// 中调用的C函数指针do_hd已经指向write_intr(),因此会在一次写扇区操作完成(或出错)
// 后就会执行该函数。
static void write_intr(void)
{
// 该函数首先判断此次写命令操作是否出错。若命令结束后控制器还处于忙状态,或者命令
// 执行错误,则处理硬盘操作失败问题,接着再次请求硬盘作复位处理并执行其他请求项。
// 然后返回。在 bad_rw_intr() 函数中,每次操作出错都会对当前请求项作出错次数累计,
// 若出错次数不到最大允许出错次数的一半,则会先执行硬盘复位操作,然后再执行本次请
// 求项处理。若出错次数已经大于等于最大允许出错次数MAX_ERRORS(7次),则结束本次
// 请求项的处理而去处理队列中下一个请求项。do_hd_request()中会根据当时具体的标志
// 状态来判别是否需要先执行复位、重新校正等操作,然后再继续或处理下一个请求项。
if (win_result()) { // 如果硬盘控制器返回错误信息,
bad_rw_intr(); // 则首先进行硬盘读写失败处理,
do_hd_request(); // 再次请求硬盘作相应(复位)处理。
return;
}
// 此时说明本次写一扇区操作成功,因此将欲写扇区数减1。若其不为0,则说明还有扇区
// 要写,于是把当前请求起始扇区号 +1,并调整请求项数据缓冲区指针指向下一块欲写的
// 数据。然后再重置硬盘中断处理程序中调用的C函数指针do_hd(指向本函数)。接着向
// 控制器数据端口写入512字节数据,然后函数返回去等待控制器把这些数据写入硬盘后产
// 生的中断。
if (--CURRENT->nr_sectors) { // 若还有扇区要写,则
CURRENT->sector++; // 当前请求起始扇区号+1,
CURRENT->buffer += 512; // 调整请求缓冲区指针,
SET_INTR(&write_intr); // do_hd置函数指针为write_intr()。
port_write(HD_DATA,CURRENT->buffer,256); // 向数据端口写256字。
return;
}
// 若本次请求项的全部扇区数据已经写完,则调用end_request()函数去处理请求项结束事宜。
// 最后再次调用 do_hd_request(),去处理其他硬盘请求项。执行其他硬盘请求操作。
end_request(1); // 处理请求结束事宜(已设置更新标志)。
do_hd_request(); // 执行其他硬盘请求操作。
}
read_intr()
read_intr()则是在当前请求项是读操作时被设置成中断过程中调用的C函数。控制器在把指定的
扇区数据从硬盘驱动器读入自己的缓冲区后,就会立刻发送中断请求信号。而该函数的主要作用
就是把控制器中的数据复制到当前请求项指定的缓冲区中。
与write_intr()开始的处理方式相同,该函数首先也调用win_result()函数,读取控制器的状态寄存器,以判断是否有错误发生。若在读盘时发送了错误,则执行与write_intr()同样的处理过程。若没有发生任何错误,则使用port_read()函数从控制器缓冲区把一个扇区的数据复制到请求项指定的缓冲区中。然后根据当前请求项中指明的欲读扇区总数,判断是否已经读取了所有的额数据。若还有数据要读,则退出,
以等待下一个中断的到来。若数据已经全部获得,则调用end_request()函数来处理当前请求项的结束事宜:唤醒等待当前请求项完成的进程、唤醒等待空闲请求项的进程(若有的话)、设置当前请求项所指缓冲区数据已更新标志、释放当前请求项(从块设备链表中删除该项)。最后继续调用do_hd_request()函数,以继续处理硬盘设备的其他请求项。
读操作中断调用函数。
// 该函数将在硬盘读命令结束时引发的硬盘中断过程中被调用。
// 在读命令执行后会产生硬盘中断信号,并执行硬盘中断处理程序,此时在硬盘中断处理程序
// 中调用的C函数指针do_hd已经指向read_intr(),因此会在一次读扇区操作完成(或出错)
// 后就会执行该函数。
static void read_intr(void)
{
// 该函数首先判断此次读命令操作是否出错。若命令结束后控制器还处于忙状态,或者命令
// 执行错误,则处理硬盘操作失败问题,接着再次请求硬盘作复位处理并执行其他请求项。
// 然后返回。每次读操作出错都会对当前请求项作出错次数累计,若出错次数不到最大允许
// 出错次数的一半,则会先执行硬盘复位操作,然后再执行本次请求项处理。若出错次数已
// 经大于等于最大允许出错次数MAX_ERRORS(7次),则结束本次请求项的处理而去处理队
// 列中下一个请求项。
if (win_result()) { // 若控制器忙、读写错或命令执行错,
bad_rw_intr(); // 则进行读写硬盘失败处理。
do_hd_request(); // 再次请求硬盘作相应(复位)处理。
return;
}
// 如果读命令没有出错,则从数据寄存器端口把1个扇区的数据读到请求项的缓冲区中,并且
// 递减请求项所需读取的扇区数值。若递减后不等于 0,表示本项请求还有数据没取完,于是
// 再次置中断调用C函数指针do_hd为read_intr()并直接返回,等待硬盘在读出另1个扇区
// 数据后发出中断并再次调用本函数。注意:281行语句中的256是指内存字,即512字节。
// 注意1:262行再次置do_hd指针指向read_intr()是因为硬盘中断处理程序每次调用do_hd
// 时都会将该函数指针置空。参见sys_call.s程序第251—253行。
port_read(HD_DATA,CURRENT->buffer,256); // 读数据到请求结构缓冲区。
CURRENT->errors = 0; // 清出错次数。
CURRENT->buffer += 512; // 调整缓冲区指针,指向新的空区。
CURRENT->sector++; // 起始扇区号加1,
if (--CURRENT->nr_sectors) { // 如果所需读出的扇区数还没读完,则再
SET_INTR(&read_intr); // 置硬盘调用C函数指针为read_intr()。
return;
}
// 执行到此,说明本次请求项的全部扇区数据已经读完,则调用end_request()函数去处理请
// 求项结束事宜。 最后再次调用 do_hd_request(),去处理其他硬盘请求项。执行其他硬盘
// 请求操作。
end_request(1); // 数据已更新标志置位(1)。
do_hd_request();
}
为了能更清晰地表明硬盘读写操作的处理过程,我们可以把这些函数、中断处理过程以及硬盘控制器三者之间的执行时序关系用图9-3和图9-4表示。
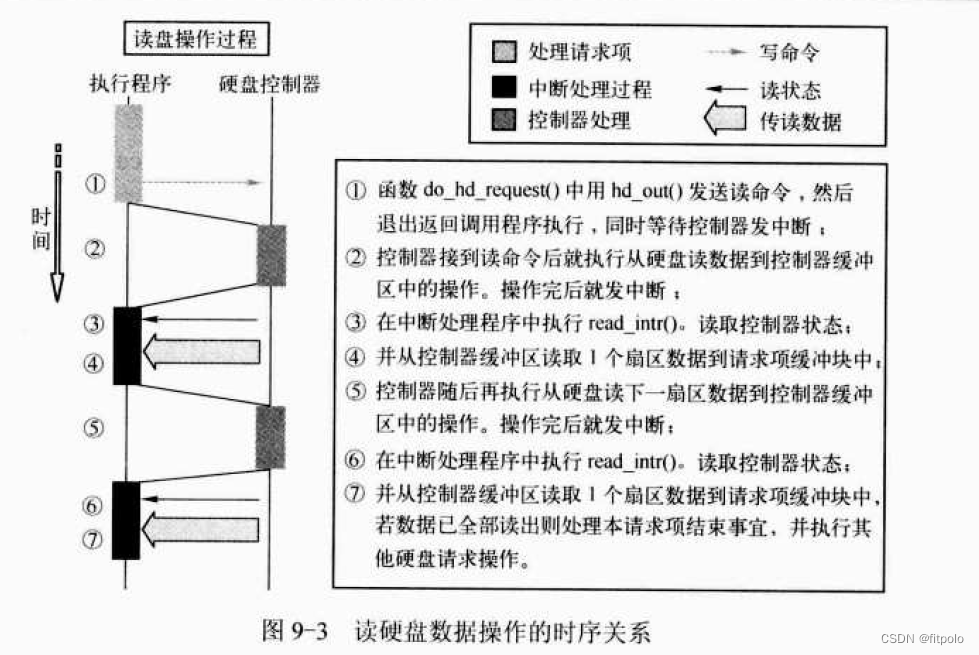
由以上分析可以看出,本程序中最重要的4个函数是hd_out()、do_hd_request()、read_intr()、write_intr()。
理解了这4个函数的作用也就理解了硬盘驱动程序的操作过程。
值得注意的是,在使用hd_out()向硬盘控制器发送了读/写或其他命令后,hd_out()函数并不会等待所发命令的执行过程,而是立刻返回调用它的程序中,例如do_hd_request()。而do_hd_request()函数 也立刻返回上一级调用它的函数(add_request()),最终返回到调用块设备读写函数ll_rw_block()的其他程序(例如fs/buffer.c的bread()函数)中去等待块设备IO的 完成。
9-3-2 代码注释
/*
* linux/kernel/hd.c
*
* (C) 1991 Linus Torvalds
*/
/*
* 本程序是底层硬盘中断辅助程序。主要用于扫描请求项队列,使用中断
* 在函数之间跳转。由于所有的函数都是在中断里调用的,所以这些函数
* 不可以睡眠。请特别注意。
*
* 由Drew Eckhardt修改,利用CMOS信息检测硬盘数。
*/
#include <linux/config.h>// 内核配置头文件。定义键盘语言和硬盘类型(HD_TYPE)选项。
#include <linux/sched.h>// 调度程序头文件,定义任务结构task_struct、任务0数据等。
#include <linux/fs.h>// 文件系统头文件。定义文件表结构(file、m_inode)等。
#include <linux/kernel.h>// 内核头文件。含有一些内核常用函数的原形定义。
#include <linux/hdreg.h>// 硬盘参数头文件。定义硬盘寄存器端口、状态码、分区表等信息。
#include <asm/system.h>// 系统头文件。定义设置或修改描述符/中断门等的汇编宏。
#include <asm/io.h>// io头文件。定义硬件端口输入/输出宏汇编语句。
#include <asm/segment.h>// 段操作头文件。定义了有关段寄存器操作的嵌入式汇编函数。
// 定义硬盘主设备号符号常数。在驱动程序中,主设备号必须在包含blk.h文件之前被定义。
// 因为blk.h文件中要用到这个符号常数值来确定一些列其他相关符号常数和宏。
#define MAJOR_NR 3 // 硬盘主设备号是3。
#include "blk.h" // 块设备头文件。定义请求数据结构、块设备数据结构和宏等信息。
// 读CMOS参数宏函数。
// 这段宏读取CMOS中硬盘信息。outb_p、inb_p是include/asm/io.h中定义的端口输入输出宏。
// 与init/main.c中读取CMOS时钟信息的宏完全一样。
#define CMOS_READ(addr) ({ \
outb_p(0x80|addr,0x70); \ // 0x70是写端口号,0x80|addr是要读的CMOS内存地址。
inb_p(0x71); \ // 0x71是读端口号。
})
/* 每扇区读/写操作允许的最多出错次数 */
#define MAX_ERRORS 7 // 读/写一个扇区时允许的最多出错次数。
#define MAX_HD 2 // 系统支持的最多硬盘数。
// 重新校正处理函数。
// 复位操作时在硬盘中断处理程序中调用的重新校正函数(311行)。
static void recal_intr(void);
// 读写硬盘失败处理调用函数。
// 结束本次请求项处理或者设置复位标志要求执行复位硬盘控制器操作后再重试(242行)。
static void bad_rw_intr(void);
// 重新校正标志。当设置了该标志,程序中会调用recal_intr()以将磁头移动到0柱面。
static int recalibrate = 0;
// 复位标志。当发生读写错误时会设置该标志并调用相关复位函数,以复位硬盘和控制器。
static int reset = 0;
/* 下面结构定义了硬盘参数及类型 */
// 硬盘信息结构(Harddisk information struct)。
// 各字段分别是磁头数、每磁道扇区数、柱面数、写前预补偿柱面号、磁头着陆区柱面号、
// 控制字节。它们的含义请参见程序列表后的说明。
struct hd_i_struct {
int head,sect,cyl,wpcom,lzone,ctl;
};
// 如果已经在include/linux/config.h配置文件中定义了符号常数HD_TYPE,就取其中定义
// 好的参数作为硬盘信息数组hd_info[]中的数据。否则先默认都设为0值,在setup()函数
// 中会重新进行设置。
#ifdef HD_TYPE
struct hd_i_struct hd_info[] = { HD_TYPE }; // 硬盘信息数组。
#define NR_HD ((sizeof (hd_info))/(sizeof (struct hd_i_struct))) // 计算硬盘个数。
#else
struct hd_i_struct hd_info[] = { {0,0,0,0,0,0},{0,0,0,0,0,0} };
static int NR_HD = 0;
#endif
// 定义硬盘分区结构。给出每个分区从硬盘0道开始算起的物理起始扇区号和分区扇区总数。
// 其中5的倍数处的项(例如hd[0]和hd[5]等)代表整个硬盘的参数。
static struct hd_struct {
long start_sect; // 分区在硬盘中的起始物理(绝对)扇区。
long nr_sects; // 分区中扇区总数。
} hd[5*MAX_HD]={{0,0},};
// 硬盘每个分区数据块总数数组。
static int hd_sizes[5*MAX_HD] = {0, };
// 读端口嵌入汇编宏。读端口port,共读nr字,保存在buf中。
#define port_read(port,buf,nr) \
__asm__("cld;rep;insw"::"d" (port),"D" (buf),"c" (nr):"cx","di")
// 写端口嵌入汇编宏。写端口port,共写nr字,从buf中取数据。
#define port_write(port,buf,nr) \
__asm__("cld;rep;outsw"::"d" (port),"S" (buf),"c" (nr):"cx","si")
extern void hd_interrupt(void); // 硬盘中断过程(sys_call.s,235行)。
extern void rd_load(void); // 虚拟盘创建加载函数(ramdisk.c,71行)。
/* 下面该函数只在初始化时被调用一次。用静态变量callable作为可调用标志。*/
// 系统设置函数。
// 函数参数BIOS是由初始化程序init/main.c中init子程序设置为指向硬盘参数表结构的指针。
// 该硬盘参数表结构包含2个硬盘参数表的内容(共32字节),是从内存0x90080处复制而来。
// 0x90080处的硬盘参数表是由setup.s程序利用ROM BIOS功能取得。硬盘参数表信息参见程序
// 列表后的说明。 本函数主要功能是读取 CMOS和硬盘参数表信息,用于设置硬盘分区结构hd,
// 并尝试加载RAM虚拟盘和根文件系统。
int sys_setup(void * BIOS)
{
static int callable = 1; // 限制本函数只能被调用1次的标志。
int i,drive;
unsigned char cmos_disks;
struct partition *p;
struct buffer_head * bh;
// 首先设置callable标志,使得本函数只能被调用1次。然后设置硬盘信息数组hd_info[]。
// 如果在 include/linux/config.h 文件中已定义了符号常数HD_TYPE,那么 hd_info[]数组
// 已经在前面第49行上设置好了。否则就需要读取boot/setup.s程序存放在内存0x90080处
// 开始的硬盘参数表。setup.s程序在内存此处连续存放着一到两个硬盘参数表。
if (!callable)
return -1;
callable = 0;
#ifndef HD_TYPE // 如果没有定义HD_TYPE,则读取。
for (drive=0 ; drive<2 ; drive++) {
hd_info[drive].cyl = *(unsigned short *) BIOS; // 柱面数。
hd_info[drive].head = *(unsigned char *) (2+BIOS); // 磁头数。
hd_info[drive].wpcom = *(unsigned short *) (5+BIOS); // 写前预补偿柱面号。
hd_info[drive].ctl = *(unsigned char *) (8+BIOS); // 控制字节。
hd_info[drive].lzone = *(unsigned short *) (12+BIOS); // 磁头着陆区柱面号。
hd_info[drive].sect = *(unsigned char *) (14+BIOS); // 每磁道扇区数。
BIOS += 16; // 每个硬盘参数表长16字节,这里BIOS指向下一表。
}
// setup.s程序在取BIOS硬盘参数表信息时,如果系统中只有1个硬盘,就会将对应第2个
// 硬盘的16字节全部清零。因此这里只要判断第2个硬盘柱面数是否为0就可以知道是否有
// 第2个硬盘了。
if (hd_info[1].cyl)
NR_HD=2;
else
NR_HD=1;
#endif
// 到这里,硬盘信息数组hd_info[]已经设置好,并且确定了系统含有的硬盘数NR_HD。现在
// 开始设置硬盘分区结构数组hd[]。该数组的项0和项5 分别表示两个硬盘的整体参数,而
// 项1—4和6—9分别表示两个硬盘的4个分区的参数。 因此这里仅设置表示硬盘整体信息
// 的两项(项0和5)。
for (i=0 ; i<NR_HD ; i++) {
hd[i*5].start_sect = 0; // 硬盘起始扇区号。
hd[i*5].nr_sects = hd_info[i].head*
hd_info[i].sect*hd_info[i].cyl; // 硬盘总扇区数。
}
/*
我们对CMOS有关硬盘的信息有些怀疑:可能会出现这样的情况,
我们有一块SCSI/ESDI/等的控制器,它是以ST-506方式与BIOS
相兼容的,因而会出现在我们的BIOS参数表中,但却又不是寄存
器兼容的,因此这些参数在CMOS中又不存在。
另外,我们假设ST-506驱动器(如果有的话)是系统中的基本驱
动器,也即以驱动器1或2出现的驱动器。
第1个驱动器参数存放在CMOS字节0x12的高半字节中,第2个
存放在低半字节中。该4位字节信息可以是驱动器类型,也可能
仅是0xf。0xf表示使用CMOS中0x19字节作为驱动器1的8位
类型字节,使用CMOS中0x1A字节作为驱动器2的类型字节。
总之,一个非零值意味着硬盘是一个AT控制器兼容硬盘。
*/
// 这里根据上述原理,下面代码用来检测硬盘到底是不是AT控制器兼容的。有关CMOS信息
// 请参见第4章中4.2.3.1节。这里从CMOS偏移地址0x12处读出硬盘类型字节。如果低半
// 字节值(存放着第2个硬盘类型值)不为0,则表示系统有两硬盘,否则表示系统只有1
// 个硬盘。如果0x12处读出的值为0,则表示系统中没有AT兼容硬盘。
if ((cmos_disks = CMOS_READ(0x12)) & 0xf0)
if (cmos_disks & 0x0f)
NR_HD = 2;
else
NR_HD = 1;
else
NR_HD = 0;
// 若NR_HD = 0,则两个硬盘都不是AT控制器兼容的,两个硬盘数据结构全清零。
// 若NR_HD = 1,则将第2个硬盘的参数清零。
for (i = NR_HD ; i < 2 ; i++) {
hd[i*5].start_sect = 0;
hd[i*5].nr_sects = 0;
}
// 好,到此为止我们已经真正确定了系统中所含的硬盘个数NR_HD。现在我们来读取每个硬盘
// 上第1个扇区中的分区表信息,用来设置分区结构数组hd[] 中硬盘各分区的信息。首先利
// 用读块函数bread()读硬盘第1个数据块(fs/buffer.c,第267行),第1个参数(0x300、
// 0x305 )分别是两个硬盘的设备号,第2个参数(0)是所需读取的块号。若读操作成功,
// 则数据会被存放在缓冲块bh的数据区中。若缓冲块头指针bh为0,则说明读操作失败,则
// 显示出错信息并停机。否则我们根据硬盘第1个扇区最后两个字节应该是0xAA55来判断扇
// 区中数据的有效性,从而可以知道扇区中位于偏移0x1BE开始处的分区表是否有效。若有效
// 则将硬盘分区表信息放入硬盘分区结构数组hd[]中。最后释放bh缓冲区。
for (drive=0 ; drive<NR_HD ; drive++) {
if (!(bh = bread(0x300 + drive*5,0))) {// 0x300、0x305是设备号。
printk("Unable to read partition table of drive %d\n\r",
drive);
panic("");
}
if (bh->b_data[510] != 0x55 || (unsigned char)
bh->b_data[511] != 0xAA) {// 判断硬盘标志0xAA55。
printk("Bad partition table on drive %d\n\r",drive);
panic("");
}
p = 0x1BE + (void *)bh->b_data;// 分区表位于第1扇区0x1BE处。
for (i=1;i<5;i++,p++) {
hd[i+5*drive].start_sect = p->start_sect;
hd[i+5*drive].nr_sects = p->nr_sects;
}
brelse(bh);// 释放为存放硬盘数据块而申请的缓冲区。
}
// 现在再对每个分区中的数据块总数进行统计,并保存在硬盘分区总数据块数组hd_sizes[]中。
// 然后让设备数据块总数指针数组的本设备项指向该数组。
for (i=0 ; i<5*MAX_HD ; i++)
hd_sizes[i] = hd[i].nr_sects>>1 ;
blk_size[MAJOR_NR] = hd_sizes;
// 现在总算完成设置硬盘分区结构数组hd[]的任务。如果确实有硬盘存在并且已读入其分区
// 表,则显示“分区表正常”信息。然后尝试在系统内存虚拟盘中加载启动盘中包含的根文
// 件系统映像(blk_drv/ramdisk.c,第71行)。即在系统设置有虚拟盘的情况下判断启动盘
// 上是否还含有根文件系统的映像数据。如果有(此时该启动盘称为集成盘)则尝试把该映像
// 加载并存放到虚拟盘中,然后把此时的根文件系统设备号ROOT_DEV修改成虚拟盘的设备号。
// 接着再对交换设备进行初始化。最后安装根文件系统。
if (NR_HD)
printk("Partition table%s ok.\n\r",(NR_HD>1)?"s":"");
rd_load(); // blk_drv/ramdisk.c,第71行。
init_swapping(); // mm/swap.c,第199行。
mount_root(); // fs/super.c,第241行。
return (0);
}
判断并循环等待硬盘控制器就绪。
// 读硬盘控制器状态寄存器端口HD_STATUS(0x1f7),循环检测其中的驱动器就绪比特位(位6)
// 是否被置位并且控制器忙位(位7)是否被复位。 如果返回值retries为0,则表示等待控制
// 器空闲的时间已经超时而发生错误,若返回值不为0则说明在等待(循环)时间期限内控制器
// 回到空闲状态,OK!
// 实际上,我们仅需检测状态寄存器忙位(位7)是否为1来判断控制器是否处于忙状态,驱动
// 器是否就绪(即位6是否为1)与控制器的状态无关。因此我们可以把第172行语句改写成:
// “while (--retries && (inb_p(HD_STATUS)&0x80));”另外,由于现在的PC机速度都很快,
// 因此我们可以把等待的循环次数再加大一些,例如再增加10倍!
static int controller_ready(void)
{
int retries = 100000;
while (--retries && (inb_p(HD_STATUS)&0xc0)!=0x40);
return (retries); // 返回等待循环次数。
}
检测硬盘执行命令后的状态。(win 表示温切斯特硬盘的缩写)
// 读取状态寄存器中的命令执行结果状态。 返回0表示正常;1表示出错。如果执行命令错,
// 则需要再读错误寄存器HD_ERROR(0x1f1)。
static int win_result(void)
{
int i=inb_p(HD_STATUS);// 取状态信息。
if ((i & (BUSY_STAT | READY_STAT | WRERR_STAT | SEEK_STAT | ERR_STAT))
== (READY_STAT | SEEK_STAT))
return(0); /* ok */
if (i&1) i=inb(HD_ERROR);// 若ERR_STAT置位,则读取错误寄存器。
return (1);
}
向硬盘控制器发送命令块。
// 参数:drive - 硬盘号(0-1);nsect - 读写扇区数;sect - 起始扇区;
// head - 磁头号; cyl - 柱面号; cmd - 命令码(见控制器命令列表);
// intr_addr() - 硬盘中断处理程序中将调用的C处理函数指针。
// 该函数在硬盘控制器就绪之后,先设置全局指针变量do_hd为硬盘中断处理程序中将调用的
// C处理函数指针。然后再发送硬盘控制字节和7字节的参数命令块。
// 该函数在硬盘控制器就绪之后,先设置全局函数指针变量do_hd指向硬盘中断处理程序中将会
// 调用的C处理函数,然后再发送硬盘控制字节和7字节的参数命令块。硬盘中断处理程序的代
// 码位于kernel/sys_call.s程序第235行处。
// 第191行定义1个寄存器变量__res。该变量将被保存在1个寄存器中,以便于快速访问。
// 如果想指定寄存器(如eax),则我们可以把该句写成“register char __res asm("ax");”。
static void hd_out(unsigned int drive,unsigned int nsect,unsigned int sect,
unsigned int head,unsigned int cyl,unsigned int cmd,
void (*intr_addr)(void))
{
register int port asm("dx");// 定义局部寄存器变量并放在指定寄存器dx中。
// 首先对参数进行有效性检查。如果驱动器号大于1(只能是0、1)或者磁头号大于15,则程
// 序不支持,停机。否则就判断并循环等待驱动器就绪。如果等待一段时间后仍未就绪则表示
// 硬盘控制器出错,也停机。
if (drive>1 || head>15)
panic("Trying to write bad sector");
if (!controller_ready())
panic("HD controller not ready");
// 接着我们设置硬盘中断发生时将调用的C函数指针do_hd(该函数指针定义在blk.h文件的
// 第56--109行之间,请特别留意其中的第83行和100行)。然后在向硬盘控制器发送参数
// 和命令之前,规定要先向控制器命令端口(0x3f6)发送一指定硬盘的控制字节,以建立相
// 应的硬盘控制方式。该控制字节即是硬盘信息结构数组中的 ctl 字段。然后向控制器端口
// 0x1f1–0x1f7发送7字节的参数命令块。
SET_INTR(intr_addr); // do_hd = intr_addr在中断中被调用。
outb_p(hd_info[drive].ctl,HD_CMD); // 向控制寄存器输出控制字节。
port=HD_DATA; // 置dx为数据寄存器端口(0x1f0)。
outb_p(hd_info[drive].wpcom>>2,++port); // 参数:写预补偿柱面号(需除4)。
outb_p(nsect,++port); // 参数:读/写扇区总数。
outb_p(sect,++port); // 参数:起始扇区。
outb_p(cyl,++port); // 参数:柱面号低8位。
outb_p(cyl>>8,++port); // 参数:柱面号高8位。
outb_p(0xA0|(drive<<4)|head,++port); // 参数:驱动器号+磁头号。
outb(cmd,++port); // 命令:硬盘控制命令。
}
等待硬盘就绪。
// 该函数循环等待主状态控制器忙标志位复位。若仅有就绪或寻道结束标志置位,则表示硬盘
// 就绪,成功返回0。若经过一段时间仍为忙,则返回1。
static int drive_busy(void)
{
unsigned int i;
unsigned char c;
// 循环读取控制器的主状态寄存器HD_STATUS,等待就绪标志位置位并且忙位复位。然后检测
// 其中忙位、就绪位和寻道结束位。若仅有就绪或寻道结束标志置位,则表示硬盘就绪,返回
// 0。否则表示等待超时。于是警告显示信息。并返回1。
for (i = 0; i < 50000; i++) {
c = inb_p(HD_STATUS);
c &= (BUSY_STAT | READY_STAT | SEEK_STAT); // 取主控制器状态字节。
if (c == (READY_STAT | SEEK_STAT))
return 0;
}
printk("HD controller times out\n\r"); // 等待超时,显示信息。并返回1。
return(1);
}
诊断复位(重新校正)硬盘控制器。
// 首先向控制寄存器端口(0x3f6)发送允许复位(4)控制字节。然后循环空操作等待一段时
// 间让控制器执行复位操作。接着再向该端口发送正常的控制字节(不禁止重试、重读),并等
// 待硬盘就绪。若等待硬盘就绪超时,则显示警告信息。然后读取错误寄存器内容,若其不等
// 于1(表示无错误)则显示硬盘控制器复位失败信息。
static void reset_controller(void)
{
int i;
outb(4,HD_CMD); // 向控制寄存器端口发送复位控制字节。
for(i = 0; i < 1000; i++) nop(); // 等待一段时间。
outb(hd_info[0].ctl & 0x0f ,HD_CMD); // 发送正常控制字节(不禁止重试、重读)。
if (drive_busy())
printk("HD-controller still busy\n\r");
if ((i = inb(HD_ERROR)) != 1)
printk("HD-controller reset failed: %02x\n\r",i);
}
硬盘复位操作。
// 首先复位(重新校正)硬盘控制器。然后发送硬盘控制器命令“建立驱动器参数”。在本
// 命令引起的硬盘中断处理程序中又会调用本函数。此时该函数会根据执行该命令的结果判
// 断是否要进行出错处理或是继续执行请求项处理操作。
static void reset_hd(void)
{
static int i;
// 如果复位标志reset是置位的,则在把复位标志清零后,执行复位硬盘控制器操作。然后
// 针对第i个硬盘向控制器发送“建立驱动器参数”命令。当控制器执行了该命令后,又会
// 发出硬盘中断信号。此时本函数会被中断过程调用而再次执行。由于reset已经标志复位,
// 因此会首先去执行246行开始的语句,判断命令执行是否正常。若还是发生错误就会调用
// bad_rw_intr() 函数以统计出错次数并根据次确定是否在设置reset标志。如果又设置了
// reset标志则跳转到repeat重新执行本函数。若复位操作正常,则针对下一个硬盘发送
// “建立驱动器参数”命令,并作上述同样处理。如果系统中NR_HD个硬盘都已经正常执行
// 了发送的命令,则再次do_hd_request()函数开始对请求项进行处理。
repeat:
if (reset) {
reset = 0;
i = -1; // 初始化当前硬盘号(静态变量)。
reset_controller();
} else if (win_result()) {
bad_rw_intr();
if (reset)
goto repeat;
}
i++; // 处理下一个硬盘(第1个是0)。
if (i < NR_HD) {
hd_out(i,hd_info[i].sect,hd_info[i].sect,hd_info[i].head-1,
hd_info[i].cyl,WIN_SPECIFY,&reset_hd);
} else
do_hd_request(); // 执行请求项处理。
}
意外硬盘中断调用函数。
// 发生意外硬盘中断时,硬盘中断处理程序中调用的默认C处理函数。在被调用函数指针为
// NULL时调用该函数。参见(kernel/sys_call.s,第256行)。该函数在显示警告信息后
// 设置复位标志reset,然后继续调用请求项函数go_hd_request()并在其中执行复位处理
// 操作。
void unexpected_hd_interrupt(void)
{
printk("Unexpected HD interrupt\n\r");
reset = 1;
do_hd_request();
}
读写硬盘失败处理调用函数。
// 如果读扇区时的出错次数大于或等于7次时,则结束当前请求项并唤醒等待该请求的进程,
// 而且对应缓冲区更新标志复位,表示数据没有更新。如果读写一扇区时的出错次数已经大于
// 3次,则要求执行复位硬盘控制器操作(设置复位标志)。
static void bad_rw_intr(void)
{
if (++CURRENT->errors >= MAX_ERRORS)
end_request(0);
if (CURRENT->errors > MAX_ERRORS/2)
reset = 1;
}
读操作中断调用函数。
// 该函数将在硬盘读命令结束时引发的硬盘中断过程中被调用。
// 在读命令执行后会产生硬盘中断信号,并执行硬盘中断处理程序,此时在硬盘中断处理程序
// 中调用的C函数指针do_hd已经指向read_intr(),因此会在一次读扇区操作完成(或出错)
// 后就会执行该函数。
static void read_intr(void)
{
// 该函数首先判断此次读命令操作是否出错。若命令结束后控制器还处于忙状态,或者命令
// 执行错误,则处理硬盘操作失败问题,接着再次请求硬盘作复位处理并执行其他请求项。
// 然后返回。每次读操作出错都会对当前请求项作出错次数累计,若出错次数不到最大允许
// 出错次数的一半,则会先执行硬盘复位操作,然后再执行本次请求项处理。若出错次数已
// 经大于等于最大允许出错次数MAX_ERRORS(7次),则结束本次请求项的处理而去处理队
// 列中下一个请求项。
if (win_result()) { // 若控制器忙、读写错或命令执行错,
bad_rw_intr(); // 则进行读写硬盘失败处理。
do_hd_request(); // 再次请求硬盘作相应(复位)处理。
return;
}
// 如果读命令没有出错,则从数据寄存器端口把1个扇区的数据读到请求项的缓冲区中,并且
// 递减请求项所需读取的扇区数值。若递减后不等于 0,表示本项请求还有数据没取完,于是
// 再次置中断调用C函数指针do_hd为read_intr()并直接返回,等待硬盘在读出另1个扇区
// 数据后发出中断并再次调用本函数。注意:281行语句中的256是指内存字,即512字节。
// 注意1:262行再次置do_hd指针指向read_intr()是因为硬盘中断处理程序每次调用do_hd
// 时都会将该函数指针置空。参见sys_call.s程序第251—253行。
port_read(HD_DATA,CURRENT->buffer,256); // 读数据到请求结构缓冲区。
CURRENT->errors = 0; // 清出错次数。
CURRENT->buffer += 512; // 调整缓冲区指针,指向新的空区。
CURRENT->sector++; // 起始扇区号加1,
if (--CURRENT->nr_sectors) { // 如果所需读出的扇区数还没读完,则再
SET_INTR(&read_intr); // 置硬盘调用C函数指针为read_intr()。
return;
}
// 执行到此,说明本次请求项的全部扇区数据已经读完,则调用end_request()函数去处理请
// 求项结束事宜。 最后再次调用 do_hd_request(),去处理其他硬盘请求项。执行其他硬盘
// 请求操作。
end_request(1); // 数据已更新标志置位(1)。
do_hd_request();
}
写扇区中断调用函数。
// 该函数将在硬盘写命令结束时引发的硬盘中断过程中被调用。函数功能与read_intr()类似。
// 在写命令执行后会产生硬盘中断信号,并执行硬盘中断处理程序,此时在硬盘中断处理程序
// 中调用的C函数指针do_hd已经指向write_intr(),因此会在一次写扇区操作完成(或出错)
// 后就会执行该函数。
static void write_intr(void)
{
// 该函数首先判断此次写命令操作是否出错。若命令结束后控制器还处于忙状态,或者命令
// 执行错误,则处理硬盘操作失败问题,接着再次请求硬盘作复位处理并执行其他请求项。
// 然后返回。在 bad_rw_intr() 函数中,每次操作出错都会对当前请求项作出错次数累计,
// 若出错次数不到最大允许出错次数的一半,则会先执行硬盘复位操作,然后再执行本次请
// 求项处理。若出错次数已经大于等于最大允许出错次数MAX_ERRORS(7次),则结束本次
// 请求项的处理而去处理队列中下一个请求项。do_hd_request()中会根据当时具体的标志
// 状态来判别是否需要先执行复位、重新校正等操作,然后再继续或处理下一个请求项。
if (win_result()) { // 如果硬盘控制器返回错误信息,
bad_rw_intr(); // 则首先进行硬盘读写失败处理,
do_hd_request(); // 再次请求硬盘作相应(复位)处理。
return;
}
// 此时说明本次写一扇区操作成功,因此将欲写扇区数减1。若其不为0,则说明还有扇区
// 要写,于是把当前请求起始扇区号 +1,并调整请求项数据缓冲区指针指向下一块欲写的
// 数据。然后再重置硬盘中断处理程序中调用的C函数指针do_hd(指向本函数)。接着向
// 控制器数据端口写入512字节数据,然后函数返回去等待控制器把这些数据写入硬盘后产
// 生的中断。
if (--CURRENT->nr_sectors) { // 若还有扇区要写,则
CURRENT->sector++; // 当前请求起始扇区号+1,
CURRENT->buffer += 512; // 调整请求缓冲区指针,
SET_INTR(&write_intr); // do_hd置函数指针为write_intr()。
port_write(HD_DATA,CURRENT->buffer,256); // 向数据端口写256字。
return;
}
// 若本次请求项的全部扇区数据已经写完,则调用end_request()函数去处理请求项结束事宜。
// 最后再次调用 do_hd_request(),去处理其他硬盘请求项。执行其他硬盘请求操作。
end_request(1); // 处理请求结束事宜(已设置更新标志)。
do_hd_request(); // 执行其他硬盘请求操作。
}
硬盘重新校正(复位)中断调用函数。
// 该函数会在硬盘执行重新校正操作而引发的硬盘中断中被调用。
// 如果硬盘控制器返回错误信息,则函数首先进行硬盘读写失败处理,然后请求硬盘作相应
// (复位)处理。 在 bad_rw_intr() 函数中,每次操作出错都会对当前请求项作出错次数
// 累计,若出错次数不到最大允许出错次数的一半,则会先执行硬盘复位操作,然后再执行
// 本次请求项处理。若出错次数已经大于等于最大允许出错次数MAX_ERRORS(7次),则结
// 束本次请求项的处理而去处理队列中下一个请求项。do_hd_request() 中会根据当时具体
// 的标志状态来判别是否需要先执行复位、重新校正等操作,然后再继续或处理下一请求项。
static void recal_intr(void)
{
if (win_result()) // 若返回出错,则调用bad_rw_intr()。
bad_rw_intr();
do_hd_request();
}
// 硬盘操作超时处理。
// 本函数会在do_timer()中(kernel/sched.c,第340行)被调用。在向硬盘控制器发送了
// 一个命令后,若在经过了hd_timeout个系统滴答后控制器还没有发出一个硬盘中断信号,
// 则说明控制器(或硬盘)操作超时。此时do_timer()就会调用本函数设置复位标志reset
// 并调用do_hd_request()执行复位处理。若在预定时间内(200滴答)硬盘控制器发出了硬
// 盘中断并开始执行硬盘中断处理程序,那么ht_timeout值就会在中断处理程序中被置0。
// 此时do_timer()就会跳过本函数。
void hd_times_out(void)
{
// 如果当前并没有请求项要处理(设备请求项指针为NULL),则无超时可言,直接返回。否
// 则先显示警告信息,然后判断当前请求项执行过程中发生的出错次数是否已经大于设定值
// MAX_ERRORS(7)。如果是则以失败形式结束本次请求项的处理(不设置数据更新标志)。
// 然后把中断过程中调用的C函数指针do_hd置空,并设置复位标志reset,继而在请求项
// 处理函数do_hd_request()中去执行复位操作。
if (!CURRENT)
return;
printk("HD timeout");
if (++CURRENT->errors >= MAX_ERRORS)
end_request(0);
SET_INTR(NULL); // 令do_hd = NULL,time_out=200。
reset = 1; // 设置复位标志。
do_hd_request();
}
执行硬盘读写请求操作。
// 该函数根据设备当前请求项中的设备号和起始扇区号信息首先计算得到对应硬盘上的柱面号、
// 当前磁道中扇区号、磁头号数据,然后再根据请求项中的命令(READ/WRITE)对硬盘发送相应
// 读/写命令。 若控制器复位标志或硬盘重新校正标志已被置位,那么首先会去执行复位或重新
// 校正操作。
// 若请求项此时是块设备的第1个(原来设备空闲),则块设备当前请求项指针会直接指向该请
// 求项(参见ll_rw_blk.c,28行),并会立刻调用本函数执行读写操作。否则在一个读写操作
// 完成而引发的硬盘中断过程中,若还有请求项需要处理,则也会在硬盘中断过程中调用本函数。
// 参见kernel/sys_call.s,235行。
void do_hd_request(void)
{
int i,r;
unsigned int block,dev;
unsigned int sec,head,cyl;
unsigned int nsect;
// 函数首先检测请求项的合法性。若请求队列中已没有请求项则退出(参见blk.h,127行)。
// 然后取设备号中的子设备号(见列表后对硬盘设备号的说明)以及设备当前请求项中的起始
// 扇区号。子设备号即对应硬盘上各分区。如果子设备号不存在或者起始扇区大于该 分区扇
// 区数-2,则结束该请求项,并跳转到标号repeat处(定义在INIT_REQUEST开始处)。因为
// 一次要求读写一块数据(2个扇区,即1024字节),所以请求的扇区号不能大于分区中最后
// 倒数第二个扇区号。然后通过加上子设备号对应分区的起始扇区号,就把需要读写的块对应
// 到整个硬盘的绝对扇区号block上。而子设备号被5整除即可得到对应的硬盘号。
INIT_REQUEST;
dev = MINOR(CURRENT->dev);
block = CURRENT->sector; // 请求的起始扇区。
if (dev >= 5*NR_HD || block+2 > hd[dev].nr_sects) {
end_request(0);
goto repeat; // 该标号在blk.h最后面。
}
block += hd[dev].start_sect;
dev /= 5; // 此时dev代表硬盘号(硬盘0还是硬盘1)。
// 然后根据求得的绝对扇区号block和硬盘号dev,我们就可以计算出对应硬盘中的磁道中扇
// 区号(sec)、所在柱面号(cyl) 和磁头号(head)。 下面嵌入的汇编代码即用来根据硬
// 盘信息结构中的每磁道扇区数和硬盘磁头数来计算这些数据。计算方法为:
// 310--311行代码初始时eax是扇区号block,edx中置0。divl指令把edx:eax组成的扇区
// 号除以每磁道扇区数(hd_info[dev].sect),所得整数商值在eax中,余数在edx中。其
// 中eax中是到指定位置的对应总磁道数(所有磁头面),edx中是当前磁道上的扇区号。
// 312--313行代码初始时eax是计算出的对应总磁道数,edx中置0。divl指令把edx:eax
// 的对应总磁道数除以硬盘总磁头数(hd_info[dev].head),在eax中得到的整除值是柱面
// 号(cyl),edx中得到的余数就是对应得当前磁头号(head)。
__asm__("divl %4":"=a" (block),"=d" (sec):"0" (block),"1" (0),
"r" (hd_info[dev].sect));
__asm__("divl %4":"=a" (cyl),"=d" (head):"0" (block),"1" (0),
"r" (hd_info[dev].head));
sec++;
nsect = CURRENT->nr_sectors; // 对计算所得当前磁道扇区号进行调整。
// 此时我们得到了欲读写的硬盘起始扇区block所对应的硬盘上柱面号(cyl)、在当前磁道
// 上的扇区号(sec)、磁头号(head)以及欲读写的总扇区数(nsect)。 接着我们可以根
// 据这些信息向硬盘控制器发送I/O操作信息了。 但在发送之前我们还需要先看看是否有复
// 位控制器状态和重新校正硬盘的标志。通常在复位操作之后都需要重新校正硬盘磁头位置。
// 若这些标志已被置位,则说明前面的硬盘操作可能出现了一些问题,或者现在是系统第一
// 次硬盘读写操作等情况。 于是我们就需要重新复位硬盘或控制器并重新校正硬盘。
// 如果此时复位标志reset是置位的,则需要执行复位操作。复位硬盘和控制器,并置硬盘
// 需要重新校正标志,返回。reset_hd()将首先向硬盘控制器发送复位(重新校正)命令,
// 然后发送硬盘控制器命令“建立驱动器参数”。
if (reset) {
recalibrate = 1; // 置需重新校正标志。
reset_hd();
return;
}
// 如果此时重新校正标志(recalibrate)是置位的,则首先复位该标志,然后向硬盘控制
// 器发送重新校正命令。该命令会执行寻道操作,让处于任何地方的磁头移动到0柱面。
if (recalibrate) {
recalibrate = 0;
hd_out(dev,hd_info[CURRENT_DEV].sect,0,0,0,
WIN_RESTORE,&recal_intr);
return;
}
// 如果以上两个标志都没有置位,那么我们就可以开始向硬盘控制器发送真正的数据读/写
// 操作命令了。如果当前请求是写扇区操作,则发送写命令,循环读取状态寄存器信息并判
// 断请求服务标志DRQ_STAT是否置位。DRQ_STAT是硬盘状态寄存器的请求服务位,表示驱
// 动器已经准备好在主机和数据端口之间传输一个字或一个字节的数据。这方面的信息可参
// 见程序前面的硬盘操作读/写时序图。如果请求服务DRQ置位则退出循环。 若等到循环结
// 束也没有置位,则表示发送的要求写硬盘命令失败,于是跳转去处理出现的问题或继续执
// 行下一个硬盘请求。否则我们就可以向硬盘控制器数据寄存器端口HD_DATA写入1个扇区
// 的数据。
if (CURRENT->cmd == WRITE) {
hd_out(dev,nsect,sec,head,cyl,WIN_WRITE,&write_intr);
for(i=0 ; i<10000 && !(r=inb_p(HD_STATUS)&DRQ_STAT) ; i++)
/* nothing */ ;
if (!r) {
bad_rw_intr();
goto repeat;// 该标号在blk.h文件最后面。
}
port_write(HD_DATA,CURRENT->buffer,256);
// 如果当前请求是读硬盘数据,则向硬盘控制器发送读扇区命令。若命令无效则停机。
} else if (CURRENT->cmd == READ) {
hd_out(dev,nsect,sec,head,cyl,WIN_READ,&read_intr);
} else
panic("unknown hd-command");
}
// 硬盘系统初始化。
// 设置硬盘中断描述符,并允许硬盘控制器发送中断请求信号。
// 该函数设置硬盘设备的请求项处理函数指针为do_hd_request(),然后设置硬盘中断门描述
// 符。hd_interrupt(kernel/sys_call.s,第235行)是其中断处理过程地址。 硬盘中断号
// 为int 0x2E(46),对应8259A芯片的中断请求信号IRQ13。接着复位接联的主8259A int2
// 的屏蔽位,允许从片发出中断请求信号。再复位硬盘的中断请求屏蔽位(在从片上),允许
// 硬盘控制器发送中断请求信号。中断描述符表IDT内中断门描述符设置宏set_intr_gate()
// 在include/asm/system.h中实现。
void hd_init(void)
{
blk_dev[MAJOR_NR].request_fn = DEVICE_REQUEST; // do_hd_request()。
set_intr_gate(0x2E,&hd_interrupt); // 设置中断门中处理函数指针。
outb_p(inb_p(0x21)&0xfb,0x21); // 复位接联的主8259A int2的屏蔽位。
outb(inb_p(0xA1)&0xbf,0xA1); // 复位硬盘中断请求屏蔽位(在从片上)。
}
9-3-3 其他信息
1、AT硬盘接口寄存器
2、AT硬盘控制器编码
3、硬盘基本参数表
4、硬盘设备号命名方式
5、硬盘分区表
6、扇区号与柱面号、当前磁道扇区号和当前磁头号的对应关系
假定硬盘的每磁道扇区数是track_secs,
硬盘磁头总数是dev_heads,
指定的硬盘顺序扇区号是sector,
对应当前磁道总数是tracks,
对应的柱面号cyl,
在当前磁道上的扇区号是sec,
磁头号是head。
那么若想从指定顺序扇区号sector换算成对应的柱面号、当前磁道上扇区号以及
当前磁头号,则可以使用以下步骤:
(1)sector(顺序扇区号)/track_secs(每磁道扇区数) = 整数是tracks,余数是sec
(2)tracks(对应当前磁道总数)/dev_heads(硬盘磁头总数) = 整数是cyl,余数是head。
(3)在当前磁道上扇区号从1算起,于是需要把sec增1。
若想从指定的当前cyl、sec和head换算成从硬盘开始算起的顺序扇区号,则过程正好相反。
换算公式和上面给出的完全一样,即
sector = (cyl * dev_heads + head) * track_secs + sec - 1
指定的硬盘顺序扇区号 = (对应的柱面号*硬盘磁头总数+磁头号)*每磁道扇区数+在当前磁道上的扇区号 - 1