- 秋风阁(https://focus-wind.com/)
文章目录
- 基本概念
- Swarm节点
- 任务与服务
- 集群管理
- 端口配置
- 创建集群
- 加入集群
- 查看集群
- 退出集群
- 节点设置
- 节点标签设置
- 节点信息查询
- 服务管理
- 部署服务
- 查看服务
- 服务日志查看
- 服务重启
- Docker Swarm官方文档
Docker Swarm是Docker引擎原生内置的容器集群管理工具。
基本概念
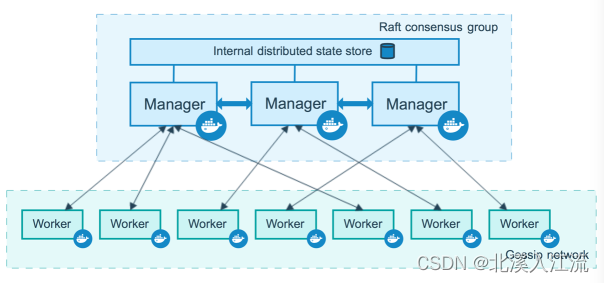
Swarm节点
运行Docker的主机可以主动初始化一个Swarm集群作为Leader节点或者加入一个已存在的Swarm集群,这样这个运行Docker的主机就成为一个Swarm集群的节点。
Swarm集群节点可以分为manager管理节点和work工作节点。
管理节点用于Swarm集群的管理,docker swarm命令基本只能在管理节点执行。一个Swarm集群可以有多个管理节点,但只有一个管理节点可以成为Leader。
为了利用Swarm模式的容错特性,Docker建议您根据组织的高可用性要求实现奇数个节点。当您有多个管理器时,您可以从管理器节点的故障中恢复而无需停机。Docker建议一个Swarm最多使用七个管理器节点。一个N管理器集群最多可以容忍丢失 N − 1 2 \frac{N - 1}{2} 2N−1管理器。如:一个三管理器群最多可以容忍一名管理器的损失。
工作节点是任务执行节点,管理节点将服务(service)下发至工作节点执行。管理节点默认也作为工作节点。也可以通过配置让服务只运行在管理节点。
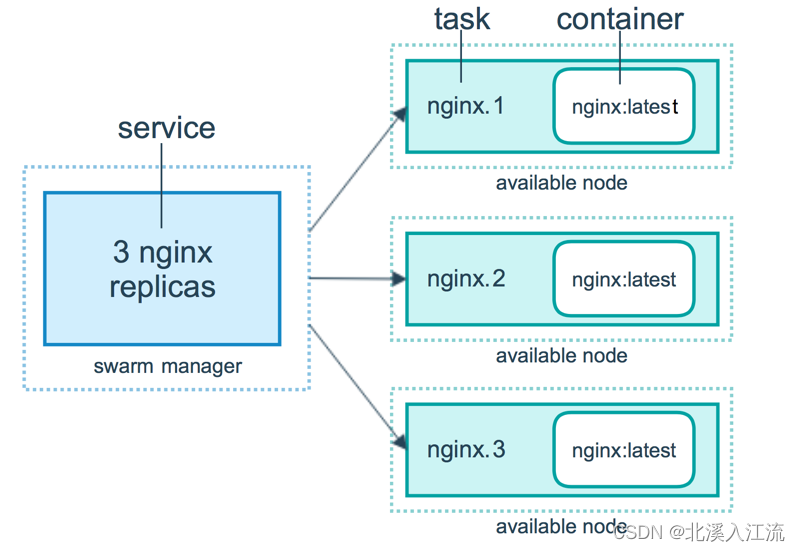
任务与服务
- 任务(task)是Swarm中的最小的调度单位,目前来说就是一个单一的容器。
- 服务(services)是指一组任务的集合,服务定义了任务的属性。
集群管理
端口配置
- 2377(TCP): 用来与管理器节点之间进行通信。不开放2377端口,可能会导致无法加入集群中。
- 7946(TCP/UDP): 用于docker节点之间的通信。
- 4789(UDP): 覆盖网络流量。
- 4789端口是Swarm数据路径端口的默认值,也称为VXLAN端口。防止任何不受信任的流量到达此端口很重要,因为VXLAN不提供身份验证。此端口应只对受信任的网络开放,而绝不能在外围防火墙上开放。
创建集群
$ docker swarm init --advertise-addr ${IP}
Swarm initialized: current node (xxx) is now a manager.
To add a worker to this swarm, run the following command:
docker swarm join --token xxx IP:2377
To add a manager to this swarm, run 'docker swarm join-token manager' and follow the instructions.
在服务器上调用docker swarm init若输出正常即集群模式创建成功。本主机自动成为Leader管理员节点。当一台主机有多个网卡多个IP时,需要使用--advertise-addr参数来指定IP。
加入集群
在加入集群时,需要保证两个主机之间可以正常通讯。在加入集群时,需要Leader节点的token信息。在Leader节点中输入:
$ docker swarm join-token [manager|worker]
To add a manager to this swarm, run the following command:
docker swarm join --token xxx IP:2377
根据需要加入工作节点还是管理节点选择参数,生成加入节点的语句。在主机中键入命令即可加入Leader节点。
$ docker swarm join --token xxx IP:2377
查看集群
$ docker node ls
ID HOSTNAME STATUS AVAILABILITY MANAGER STATUS ENGINE VERSION
xxx * docker-desktop Ready Active Leader 20.10.23
通过docker node ls命令查看当前集群中有多少节点,节点的活动状况。
退出集群
$ docker swarm leave --force
Node left the swarm.
通过docker swarm leave来离开集群,对于Leader节点或退出集群失败的情况可以通过--force参数来强制退出。
节点设置
节点标签设置
在集群环境中,因为不同节点的系统、配置、环境等的不同,导致有的服务只能在只能在指定的机器上跑(如:只在带GPU机器上跑人工智能相关模型的服务),或者由于业务原因导致我们需要在特定的节点上跑相关服务。我们可以通过给节点设置label标签的方式来使节点固定在相关的机器上。
$ docker node update --label-add ${key}=${value} ${node_id}
${node_id}可以根据docker node ls命令进行查看,通过给节点添加label,在docker-compose文件中添加如下配置使服务只能在指定节点中运行。
deploy:
placement:
constraints:
- node.labels.${key} == ${value}
节点信息查询
$ docker inspect ${node_id}
...
"Spec": {
"Labels": {
"arch": "x86_64"
},
"Role": "manager",
"Availability": "active"
},
...
通过docker inspect ${node_id}命令来查看节点的详情信息,如:我们可以通过inspect命令来查看我们对节点设置的标签信息。
服务管理
Docker Swarm采用懒加载的方式进行服务的部署,当调用完部署服务的命令后,可能会长时间看到服务没有正常启动,日志也没有任何输出,此时有可能是因为系统中还没有下载相关的镜像,Docker引擎正在后台默默的下载镜像。
部署服务
Swarm内置docker compose,可以通过docker-compose文件来进行部署,一次启动多个关联的服务。在Swarm中,我们可以使用docker stack deploy来进行Swarm服务的部署。
$ docker stack deploy ${services_name} -c ${compose_file_path}
其中-c指定docker-compose文件,在一次部署中可以指定多个服务部署文件进行多服务的部署。
查看服务
$ docker stack ls
通过docker stack ls可以查看本集群中有多少服务集,各个服务集里面有多少个服务
$ docker stack services ${services_name|servicves_id}
通过docker stack services ${services_name|servicves_id}命令查看该服务集下面有多少具体的服务,服务里面有多少个分片或任务,各个服务的具体运行情况。
服务日志查看
在docker服务中,可以通过volume挂在目录的方式将数据和日志等文件信息挂载到容器外。通过这种方式,可以有效健壮的保留容器的运行信息可进行容器迁移。在使用Docker时,建议将数据和日志挂载到外部磁盘上,这样可以打开外部文件进行日志信息的查看和传输管理等操作。
也可以使用如下命令:
docker service logs ${service_name|service_id} -f -t
注意查看日志的名称为${service_name|service_id}。可以通过docker stack services ${services_name|servicves_id}命令来查看具体的${service_name|service_id}信息、其中-t参数表示显示日志的时间戳,-f参数表示跟踪日志输出,即当在查看服务日志时,仍有日志输出,控制台会同步显示更新的日志信息。根据需要添加参数。
服务重启
docker service update --force
若服务因系统资源不足或出现错误等而出现挂掉的情况,等解决完问题后,可以使用docker service update --force命令来强制重启挂掉的服务。