简介
STC32G12K128 是STC 推出的一款32位的 C251 的单片机。最近拿到一块官方申请的 屠龙刀-STC32G开发板,就用它的提供的库函数,查考安富莱提供的 modbus 例程移植了一个 modbus-rtu 主站的工程。
modbus-rtu host 移植注意点
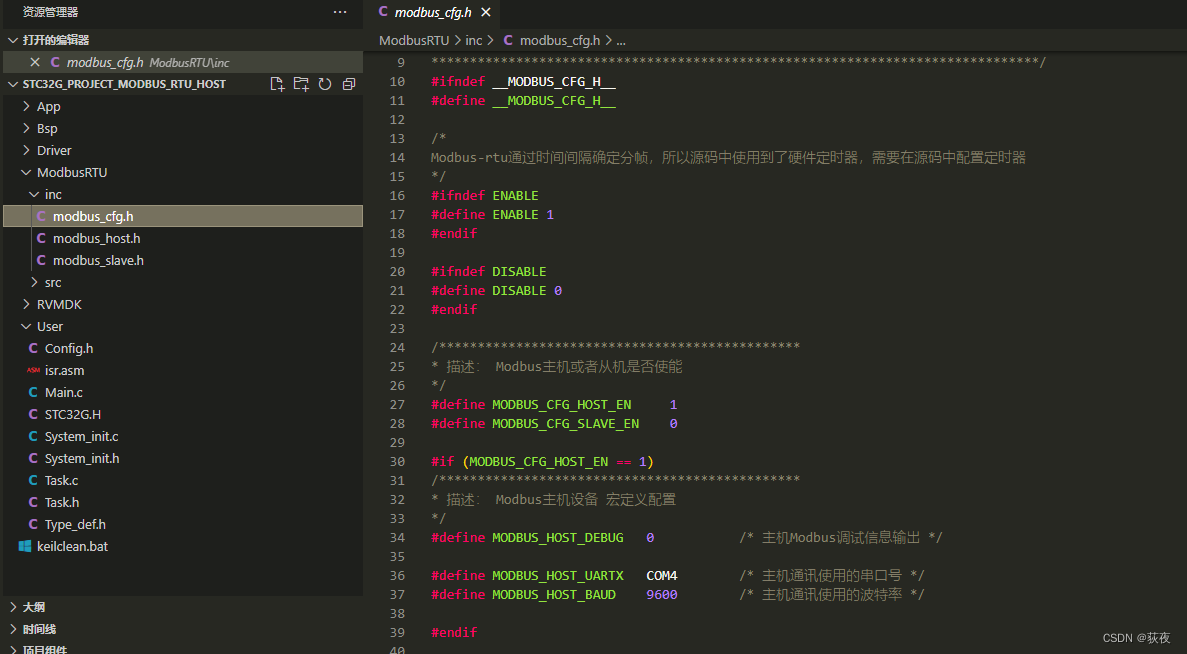
- modbus-rtu 功能配置
- 配置 modbus-rtu 使能主机还是从机,亦或是全部使能
- 配置主机或者从机使用的串口、波特率、打印调试信息
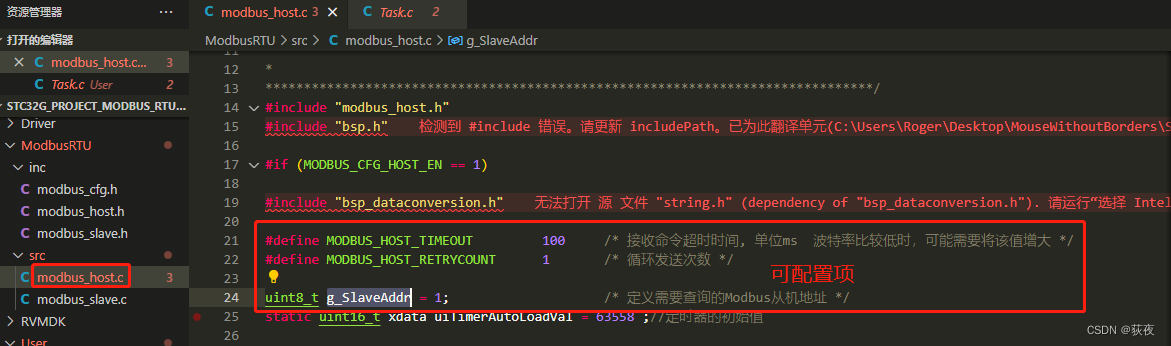
- 主机要读取的从机地址通过全局变量 g_SlaveAddr 设置。
- 初始化 modbus-rtu 主站使用到的串口和定时器
- modbus-rtu 没有开始和结束符,通过3.5个字符的时间间隔来断帧,所以此处初始化一个定时器4来计算3.5个字符的时间用于断帧。注意:此处使用定时器不要和对应串口波特率产生的定时器冲突
- 初始化对应的串口4
void MODH_PeripheralInit(void)
{
TIM_InitTypeDef TIM_InitStructure = {0};
GPIO_InitTypeDef GPIO_InitStructure; //结构定义
COMx_InitDefine COMx_InitStructure; //结构定义
/* 硬件定时器初始化 */
/*
3.5个字符的时间间隔,只是用在RTU模式下面,因为RTU模式没有开始符和结束符,
两个数据包之间只能靠时间间隔来区分,Modbus定义在不同的波特率下,间隔时间是不一样的,
所以就是3.5个字符的时间,波特率高,这个时间间隔就小,波特率低,这个时间间隔相应就大
4800 = 7.297ms
9600 = 3.646ms
19200 = 1.771ms
38400 = 0.885ms
*/
uint32_t timeout = 0;
//timeout = 35000000 / MODBUS_SLAVE_BAUD; /* 计算超时时间,单位us 35000000*/
/* 此处直接将定时器的初始值赋值,具体计算的公式参考注释,此处默认使用9600的波特率/主频22.1184MHZ,且定时器使用12T模式 */
uiTimerAutoLoadVal = 63558;//(65536UL - ((12000000*3646) / MAIN_Fosc));//3646=35000000 / 9600
/* 使用硬件定时器4 如果有冲突,请改修此处定时器 */
TIM_InitStructure.TIM_ClkSource = TIM_CLOCK_12T; //指定时钟源, TIM_CLOCK_1T,TIM_CLOCK_12T,TIM_CLOCK_Ext
TIM_InitStructure.TIM_ClkOut = DISABLE; //是否输出高速脉冲, ENABLE或DISABLE
TIM_InitStructure.TIM_Value = uiTimerAutoLoadVal; //初值 因为上面12分频了 所以是 12*1000000
TIM_InitStructure.TIM_Run = DISABLE; //是否初始化后启动定时器, ENABLE或DISABLE
Timer_Inilize(Timer4, &TIM_InitStructure); //初始化Timer4 Timer0,Timer1,Timer2,Timer3,Timer4
NVIC_Timer4_Init(ENABLE, NULL); //中断使能, ENABLE/DISABLE; 无优先级
/* 初始化串口 */
GPIO_InitStructure.Pin = GPIO_Pin_2 | GPIO_Pin_3; //指定要初始化的IO, GPIO_Pin_0 ~ GPIO_Pin_7
GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PP
GPIO_Inilize(GPIO_P0, &GPIO_InitStructure); //初始化
COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTx
COMx_InitStructure.UART_BRT_Use = BRT_Timer2; //使用波特率, BRT_Timer2, BRT_Timer4 (注意: 串口2固定使用BRT_Timer2)
COMx_InitStructure.UART_BaudRate = 9600ul; //波特率, 110 ~ 115200
COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLE
UART_Configuration(UART4, &COMx_InitStructure); //初始化串口4 UART1,UART2,UART3,UART4
NVIC_UART4_Init(ENABLE, Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
UART4_SW(UART4_SW_P02_P03); //UART4_SW_P02_P03,UART4_SW_P52_P53
}
- 在定时器的中断函数中添加 modbus-rtu 主机 3.5 个字符超时处理函数
//========================================================================
// 函数: Timer4_ISR_Handler
// 描述: Timer4中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void Timer4_ISR_Handler (void) interrupt TMR4_VECTOR //进中断时已经清除标志
{
#if ( MODBUS_CFG_SLAVE_EN == 1 )
MODS_RxTimeOut(); /* Modbus从站超时处理 */
#endif
#if ( MODBUS_CFG_HOST_EN == 1 )
MODH_RxTimeOut(); /* Modbus主站超时处理 */
#endif
// TODO: 在此处添加用户代码
//P63 = ~P63;
}
- 在串口的接口中断函数中添加 modbus-rtu 主机接收字节的处理函数
//========================================================================
// 函数: UART4_ISR_Handler
// 描述: UART4中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
#ifdef UART4
void UART4_ISR_Handler(void) interrupt UART4_VECTOR
{
if(S4RI)
{
CLR_RI4();
#if ( MODBUS_CFG_SLAVE_EN == 1 )
MODS_ReciveNew(S4BUF);
#elif ( MODBUS_CFG_HOST_EN == 1 )
MODH_ReciveNew(S4BUF);
#else
if(COM4.RX_Cnt >= COM_RX4_Lenth) COM4.RX_Cnt = 0;
RX4_Buffer[COM4.RX_Cnt++] = S4BUF;
COM4.RX_TimeOut = TimeOutSet4;
#endif
}
if(S4TI)
{
CLR_TI4();
#if(UART_QUEUE_MODE == 1) //判断是否使用队列模式
if(COM4.TX_send != COM4.TX_write)
{
S4BUF = TX4_Buffer[COM4.TX_send];
if(++COM4.TX_send >= COM_TX4_Lenth) COM4.TX_send = 0;
}
else COM4.B_TX_busy = 0;
#else
COM4.B_TX_busy = 0; //使用阻塞方式发送直接清除繁忙标志
#endif
}
}
- 在 main() 函数的大循环之前调用 MODS_PeripheralInit() 以初始化使用到的相关硬件;然后在死循环里一直调用 MODS_Poll() 解析 modbus-rtu 从机协议,并且可以定时通过API接口读取或者写入从机某个寄存器地址的值。
例程例程里,每隔 2s 往 0x301 寄存器写入一个自增 1 的值,然后下一秒从该寄存器中再读取,结果通过串口助手打印可以查看。
/* modbus主机测试任务,每1s执行一次该函数 */
void app_ModbusHostTask(void)
{
static uint8_t wrflag = 0;
static uint16_t regVal = 0;
if(wrflag == 0)
{
MODH_WriteParam_06H(REG_P01, regVal); //往寄存器 ERG_P01 寄存器中写入 regVal
printf("modbus host write reg[%hu] value:%hu\n",REG_P01,regVal);
regVal++; //写完一次后自增
}
else
{
MODH_ReadParam_03H(REG_P01,1); //从寄存器 ERG_P01 中读取
printf("modbus host read reg[%hu] value:%hu\n",REG_P01,g_tHostVar.P01);
}
wrflag = !wrflag;
}
- 可以通过 modbus_host.h 文件中的宏定义对 modbus-rtu 的功能进行裁剪,可以禁用不需要使用的功能,以解决空间。
//-----------------------------------------------------------------------------------------//
#define MODBUS_HOST_RTU_01H_FUNCTION DISABLE
#define MODBUS_HOST_RTU_02H_FUNCTION DISABLE
#define MODBUS_HOST_RTU_03H_FUNCTION ENABLE
#define MODBUS_HOST_RTU_04H_FUNCTION DISABLE
#define MODBUS_HOST_RTU_05H_FUNCTION DISABLE
#define MODBUS_HOST_RTU_06H_FUNCTION ENABLE
#define MODBUS_HOST_RTU_10H_FUNCTION ENABLE
测试
- 先将工程源码编译生成后的hex烧录到开发板中
- 再使用 USB转TTL 连接 STC32G12K28 开发板的串口4(P02-RXD P03-TXD)
- 电脑端使用 modbus 从机的模拟软件(此处使用 modbusslave )
- 根据工程源码里设置的保存寄存器的参数,设置 modbusslave 软件里,从机的地址,被读取的寄存器地址和寄存器数量

- 设置串口和波特率

- 通过 modbusslave 窗口和单片机的串口打印日志观察现象

工程源码
工程源码可以在此处下载(无需积分);如果觉得文章对你有帮忙,请关注点赞!