需要源码请点赞关注收藏后评论区留言~~~
一、指南针-磁场传感器
顾名思义,指南针只要找到朝南的方向就好了。 可是在App中并非使用一个方向传感器这么简单,事实上单独的方向传感器已经弃用,取而代之的是利用加速度传感器和磁场传感器。 获得加速度和磁场强度两个数值之后,再通过SensorManager的getRotationMatrix方法与getOrientation方法计算方向角度。
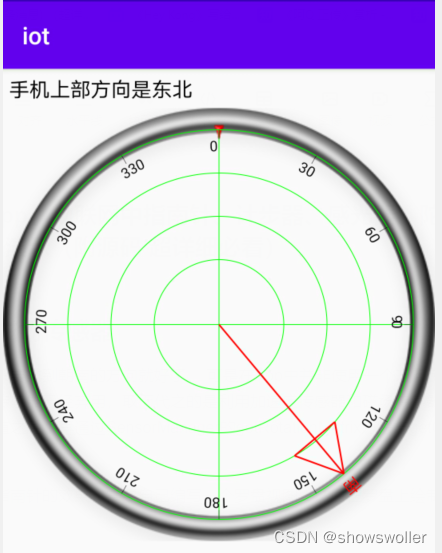
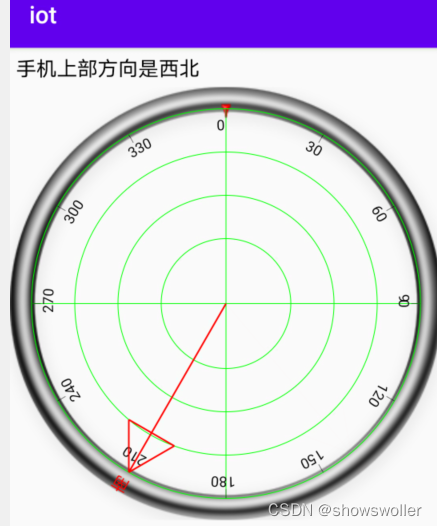
要想在手机上模拟指南针的效果,需要自己编写一个罗盘视图,然后在罗盘上绘制正南方向的指针效果如下 晃动手机头部即会显示不同方向
代码如下
package com.example.iot;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.view.View;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.widget.CompassView;
import java.util.List;
public class DirectionActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_direction; // 声明一个文本视图对象
private CompassView cv_sourth; // 声明一个罗盘视图对象
private SensorManager mSensorMgr;// 声明一个传感管理器对象
private float[] mAcceValues; // 加速度变更值的数组
private float[] mMagnValues; // 磁场强度变更值的数组
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_direction);
tv_direction = findViewById(R.id.tv_direction);
cv_sourth = findViewById(R.id.cv_sourth);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
int suitable = 0;
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_ACCELEROMETER) { // 找到加速度传感器
suitable += 1; // 找到加速度传感器
} else if (sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) { // 找到磁场传感器
suitable += 10; // 找到磁场传感器
}
}
if (suitable / 10 > 0 && suitable % 10 > 0) {
// 给加速度传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),
SensorManager.SENSOR_DELAY_NORMAL);
// 给磁场传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),
SensorManager.SENSOR_DELAY_NORMAL);
} else {
cv_sourth.setVisibility(View.GONE);
tv_direction.setText("当前设备不支持指南针,请检查是否存在加速度和磁场传感器");
}
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) { // 加速度变更事件
mAcceValues = event.values; // 加速度变更事件
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) { // 磁场强度变更事件
mMagnValues = event.values; // 磁场强度变更事件
}
if (mAcceValues != null && mMagnValues != null) {
calculateOrientation(); // 加速度和磁场强度两个都有了,才能计算磁极的方向
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
// 计算指南针的方向
private void calculateOrientation() {
float[] values = new float[3];
float[] R = new float[9];
SensorManager.getRotationMatrix(R, null, mAcceValues, mMagnValues);
SensorManager.getOrientation(R, values);
values[0] = (float) Math.toDegrees(values[0]); // 计算手机上部与正北方向的夹角
cv_sourth.setDirection((int) values[0]); // 设置罗盘视图中的指南针方向
if (values[0] >= -10 && values[0] < 10) {
tv_direction.setText("手机上部方向是正北");
} else if (values[0] >= 10 && values[0] < 80) {
tv_direction.setText("手机上部方向是东北");
} else if (values[0] >= 80 && values[0] <= 100) {
tv_direction.setText("手机上部方向是正东");
} else if (values[0] >= 100 && values[0] < 170) {
tv_direction.setText("手机上部方向是东南");
} else if ((values[0] >= 170 && values[0] <= 180)
|| (values[0]) >= -180 && values[0] < -170) {
tv_direction.setText("手机上部方向是正南");
} else if (values[0] >= -170 && values[0] < -100) {
tv_direction.setText("手机上部方向是西南");
} else if (values[0] >= -100 && values[0] < -80) {
tv_direction.setText("手机上部方向是正西");
} else if (values[0] >= -80 && values[0] < -10) {
tv_direction.setText("手机上部方向是西北");
}
}
}
二、计步器
计步器的原理是通过手机的前后摆动模拟步伐节奏的监测。Android中与计步器有关的传感器有两个。
(1)一个是步行检测(TYPE_STEP_DETECTOR) 步行检测的返回数值为1时,表示当前监测到一个步伐;
(2)另一个是步行计数(TYPE_STEP_ COUNTER) 步行计数的返回数值是累加后的数值,表示本次开机激活后的总步伐数。
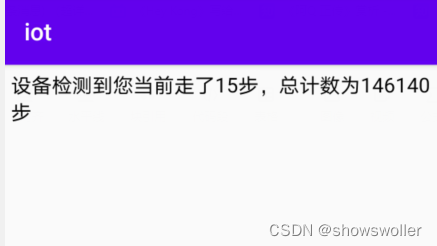
效果如下 随着走路上面的计数会发生对应的变化
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import java.util.List;
@SuppressLint("DefaultLocale")
public class StepActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_step; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
private int mStepDetector = 0; // 累加的步行检测次数
private int mStepCounter = 0; // 计步器统计的步伐数目
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_step);
tv_step = findViewById(R.id.tv_step);
initStepSensor(); // 初始化步行传感器
}
// 初始化步行传感器
private void initStepSensor() {
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
int suitable = 0;
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_STEP_DETECTOR) { // 找到步行检测传感器
suitable += 1;
// 给步行检测传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_STEP_DETECTOR),
SensorManager.SENSOR_DELAY_NORMAL);
} else if (sensor.getType() == Sensor.TYPE_STEP_COUNTER) { // 找到计步器
suitable += 10;
// 给计步器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_STEP_COUNTER),
SensorManager.SENSOR_DELAY_NORMAL);
}
}
if (suitable == 0) {
tv_step.setText("当前设备不支持计步器,请检查是否存在步行检测传感器和计步器");
}
}
@Override
protected void onDestroy() {
super.onDestroy();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_STEP_DETECTOR) { // 步行检测事件
if (event.values[0] == 1.0f) {
mStepDetector++; // 步行检测事件
}
} else if (event.sensor.getType() == Sensor.TYPE_STEP_COUNTER) { // 计步器事件
mStepCounter = (int) event.values[0]; // 计步器事件
}
String desc = String.format("设备检测到您当前走了%d步,总计数为%d步",
mStepDetector, mStepCounter);
tv_step.setText(desc);
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
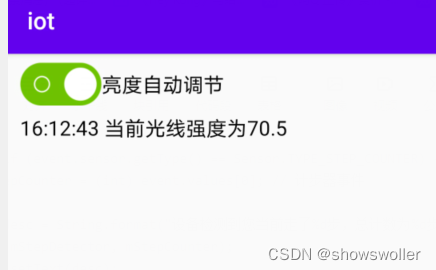
三、感光器
感光器也叫光线传感器,借助于前置摄像头的曝光,一旦遮住前置摄像头,传感器监测到的光线强度立马就会降低。 在实际开发中,光线传感器往往用于感应手机正面的光线强弱,从而自动调节屏幕亮度
摄像头没有被遮挡前数值如下
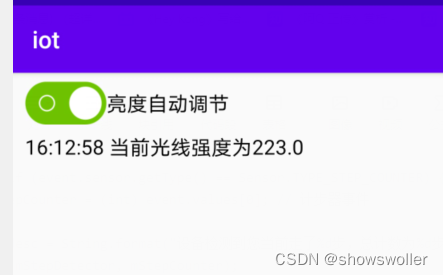
被遮挡后数值如下
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Build;
import android.os.Bundle;
import android.widget.CheckBox;
import android.widget.CompoundButton;
import android.widget.CompoundButton.OnCheckedChangeListener;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.util.DateUtil;
import com.example.iot.util.SwitchUtil;
@SuppressLint(value={"DefaultLocale","SetTextI18n"})
public class LightActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_light; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_light);
CheckBox ck_bright = findViewById(R.id.ck_bright);
// 检查屏幕亮度是否为自动调节
if (SwitchUtil.getAutoBrightStatus(this)) {
ck_bright.setChecked(true);
}
// Android8.0之后普通应用不允许修改系统设置
if (Build.VERSION.SDK_INT < Build.VERSION_CODES.O) {
ck_bright.setOnCheckedChangeListener((buttonView, isChecked) -> {
// 设置是否开启屏幕亮度的自动调节
SwitchUtil.setAutoBrightStatus(this, isChecked);
});
} else {
ck_bright.setEnabled(false);
}
tv_light = findViewById(R.id.tv_light);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
// 给光线传感器注册传感监听器
mSensorMgr.registerListener(this, mSensorMgr.getDefaultSensor(Sensor.TYPE_LIGHT),
SensorManager.SENSOR_DELAY_NORMAL);
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_LIGHT) { // 光线强度变更事件
float light_strength = event.values[0];
tv_light.setText(DateUtil.getNowTime() + " 当前光线强度为" + light_strength);
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
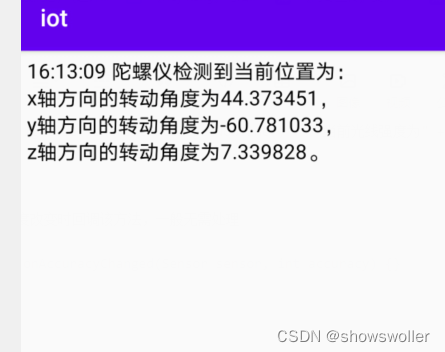
四、陀螺仪
陀螺仪是测量平衡的仪器,它的测量结果为当前与上次位置之间的倾斜角度,这个角度描述的是三维空间上的夹角,因而其数值由x、y、z三个坐标轴上的角度偏移组成。 由于陀螺仪具备三维角度的测量功能,因此它又被称作角速度传感器。 加速度传感器只能检测线性距离的大小,而陀螺仪能够检测旋转角度的大小,所以利用陀螺仪可以还原三维物体的转动行为。
运行测试效果如下 随着手机的转动示数会跟着变化
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.util.DateUtil;
import java.util.List;
@SuppressLint("DefaultLocale")
public class GyroscopeActivity extends AppCompatActivity implements SensorEventListener {
private static final float NS2S = 1.0f / 1000000000.0f; // 将纳秒转化为秒
private TextView tv_gyroscope; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
private float mTimestamp; // 记录上次的时间戳
private float mAngle[] = new float[3]; // 记录xyz三个方向上的旋转角度
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_gyroscope);
tv_gyroscope = findViewById(R.id.tv_gyroscope);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
boolean isSuitable = false;
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_GYROSCOPE) { // 找到陀螺仪
isSuitable = true;
break;
}
}
if (isSuitable) { // 找到了陀螺仪
// 给陀螺仪传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_GYROSCOPE),
SensorManager.SENSOR_DELAY_FASTEST);
} else { // 未找到陀螺仪
tv_gyroscope.setText("当前设备不支持陀螺仪,请检查是否存在陀螺仪传感器");
}
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_GYROSCOPE) { // 陀螺仪角度变更事件
if (mTimestamp != 0) {
final float dT = (event.timestamp - mTimestamp) * NS2S;
mAngle[0] += event.values[0] * dT;
mAngle[1] += event.values[1] * dT;
mAngle[2] += event.values[2] * dT;
// x轴的旋转角度,手机平放桌上,然后绕侧边转动
float angleX = (float) Math.toDegrees(mAngle[0]);
// y轴的旋转角度,手机平放桌上,然后绕底边转动
float angleY = (float) Math.toDegrees(mAngle[1]);
// z轴的旋转角度,手机平放桌上,然后水平旋转
float angleZ = (float) Math.toDegrees(mAngle[2]);
String desc = String.format("%s 陀螺仪检测到当前位置为:\n" +
"x轴方向的转动角度为%.6f,\n" +
"y轴方向的转动角度为%.6f,\n" +
"z轴方向的转动角度为%.6f。",
DateUtil.getNowTime(), angleX, angleY, angleZ);
tv_gyroscope.setText(desc);
}
mTimestamp = event.timestamp;
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
创作不易 觉得有帮助请点赞关注收藏~~~