【D435i深度相机YOLO V5结合实现目标检测】
- 1. 前言
- 2 分析
- 2.1 关于yolo部分
- 2.2 关于获取三维坐标的部分
- 2.3 关于文件结构部分
- 3. 代码
1. 前言
参考:Ubutntu下使用realsense d435i(三):使用yolo v5测量目标物中心点三维坐标
- 欢迎大家阅读2345VOR的博客【D435i深度相机YOLO V5结合实现目标检测】🥳🥳🥳
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
:这里主要是记录Ubuntu下简单使用yolov5测试检测效果的过程,我是使用realsense d435i摄像头的RGB图像。👍👍👍

本文下述使用参考的的工程均来自于下面的两个github
yolo v5参考的代码:https://github.com/ultralytics/yolov5
本文参考的代码(仅获得深度):https://github.com/killnice/yolov5-D435i
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
【D435i深度相机YOLO V5结合实现目标检测】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
上一个github代码,csdn上的讲解:【Ubuntu18.04使用yolov5教程】
我的文件是在yolov5-D435i工程基础上改的,yolov5-D435i是在yolov5工程基础上改的,源码部分参考了冰激凌啊,D435i深度相机YOLO V5结合实现目标检测部分采用彩色图和深度图对齐,根据彩色图进行YOLO V5识别,输出相对于相机坐标系的目标物体中心点的三维坐标。
2 分析
主要思路是采用彩色图形用yolo检测,深度图对齐,最后输出检测目标物体及相对位置结果。
2.1 关于yolo部分
https://github.com/ultralytics/yolov5 这是一个比较经典的yolo v5的代码,它提供了一些接口,在README.md中进行了介绍。
可以看到只要在自己写的文件里创建model就可以调用这个结果了。
import torch
# Model
model = torch.hub.load('ultralytics/yolov5', 'yolov5s') # or yolov5m, yolov5l, yolov5x, custom
# Images
img = 'https://ultralytics.com/images/zidane.jpg' # or file, Path, PIL, OpenCV, numpy, list
# Inference
results = model(img)
# Results
results.print() # or .show(), .save(), .crop(), .pandas(), etc.
2.2 关于获取三维坐标的部分
❤ https://github.com/killnice/yolov5-D435i里main_debug.py文件的深度获取方法是在中心点附近取一些随机点,
然后深度排序取中值滤波。(这些被随机选择到的中心点,在图中画了蓝色小圆圈标记这些点)猜测这样做是可以避免
realsense获取深度过程中,某点的忽然转换失效,认为深度值为0,如果取周围几个点进行获取深度,并中值滤波,将
大大提高这个深度值在测量过程中的稳定性,避免了realsense忽然某帧某点的深度值为0的情况。
❤ 我要获得中心点的坐标,可以参考Ubutntu下使用realsense d435i(二):获取某二维像素点的三维坐标修改get_mid_pos()函数,根据中心点的坐标以及中心点对应的深度获取中心点的三维坐标。
但是这样做也面临一个问题,就是上面提到的,仅仅测量中心点的深度,当忽然这个深度值为0,他的三维坐标转换就会出错,如果把这个值设为机械臂的目标点,就会导致机械臂一瞬间点的位置出错。
把realsense相机画面的频率降低会对这个现象改善一点,但还是存在,所以考虑可以参考上述深度值得解决办法,也获取周围点,做一个中值滤波。
另外就是考虑相机还没有标定,参考realsense d435相机标定,现在确实照墙壁时深度图像有很多“黑洞”,这有可能也是忽然深度值为0的原因。
❤ 未来要修改的地方
① 把【像素x,像素y,深度值z】进行一个数据结构的保存(是选择元祖、数组还是什么结构还没有想好)
② 利用随机数获取周边的一些点,同样获得这些点的【像素x,像素y,深度值z】
③ 把所有点根据深度值z进行排序和中值滤波,选择排序中间的那一个点,根据深度值以及与其对应的像素x,y,获得该点的三维坐标,并以此为目标物的三维坐标。
2.3 关于文件结构部分
由于yolo的测试程序以及对外开放了接口,所以我们只需要在原来的YOLO v5中(https://github.com/ultralytics/yolov5),再创建一个my_realsense_detect.py程序(不需要替换原来的detect.py程序),就可以了。
也就是说,把my_realsense_detect.py程序放到最开始提到的2个github程序中都可以运行。如果想放到其他的yolo程序,需要看看他具体提到的模型接口,结果接口都是什么。
3. 代码
首先我下载了https://github.com/killnice/yolov5-D435i。
我的文件是在yolov5-D435i工程基础上改的,yolov5-D435i是在yolov5工程基础上改的。
git clone https://github.com/killnice/yolov5-D435i.git d435i_yolo
code d435i_yolo/
选择环境参考:https://blog.csdn.net/vor234/article/details/130480581
pip install -r requirements.txt
pip install pyrealsense2
python main_debug.py
然后是在main_debug.py文件的基础上进行了修改,并把它重命名为了d435i_detect.py
说明:
在yolov5-D435i工程中的main.py、main_debug.py和try.py都是可以删除的,只要运行
d435i_detect.py就可以在yolov5工程中,只要把my_realsense_detect.py文件复制进去就也可以运行啦
接下来是我的代码,具体可以根据yolov5-D435i工程中的main_debug.py文件进行修改。
import pyrealsense2 as rs
import numpy as np
import cv2
import random
import torch
import time
# model = torch.hub.load('ultralytics/yolov5', 'yolov5s')
#
model = torch.hub.load('ultralytics/yolov5', 'yolov5l6')
model.conf = 0.5
def get_mid_pos(aligned_depth_frame,box):
mid_pixel = [(box[0] + box[2])//2, (box[1] + box[3])//2] #确定索引深度的中心像素位置
# 注意mid_pixel是float,但是get_distance()的参数需要是int
[x, y] = [int(mid_pixel[0]), int(mid_pixel[1])]
depth_intrin = aligned_depth_frame.profile.as_video_stream_profile().intrinsics # 获取相机深度参数
dis = aligned_depth_frame.get_distance(x, y) # 获取该像素点对应的深度
# print ('depth: ',dis) # 深度单位是m
camera_coordinate = rs.rs2_deproject_pixel_to_point(depth_intrin, [x, y], dis)
# print ('camera_coordinate: ',camera_coordinate)
return camera_coordinate
def dectshow(org_img, boxs,aligned_depth_frame):
img = org_img.copy()
for box in boxs:
cv2.rectangle(img, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])), (0, 255, 0), 2)
point_3d = dist = get_mid_pos(aligned_depth_frame,box)
[x, y, z] = point_3d
# cv.putText 图片,添加的文字,左上角坐标,字体,字体大小,颜色,字体粗细
cv2.putText(img, box[-1] + ' (' + str(x)[:4] + ',' + str(y)[:4] + ',' + str(z)[:4] + ')',
(int(box[0]), int(box[1])), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (255, 255, 255), 1)
cv2.imshow('dect_img', img)
if __name__ == "__main__":
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 60)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 60)
# Start streaming
pipe_profile = pipeline.start(config)
try:
while True:
# # Wait for a coherent pair of frames: depth and color
# frames = pipeline.wait_for_frames()
# depth_frame = frames.get_depth_frame()
# color_frame = frames.get_color_frame()
# if not depth_frame or not color_frame:
# continue
# # Convert images to numpy arrays
# depth_image = np.asanyarray(depth_frame.get_data())
# color_image = np.asanyarray(color_frame.get_data())
# Depth scale - units of the values inside a depth frame, i.e how to convert the value to units of 1 meter
# 获取深度传感器的深度标尺(参见rs - align示例进行说明)
depth_sensor = pipe_profile.get_device().first_depth_sensor()
depth_scale = depth_sensor.get_depth_scale()
# print("Depth Scale is: ", depth_scale) # ('Depth Scale is: ', 0.0010000000474974513)
# 创建对齐对象与color流对齐
# align_to 是计划对齐深度帧的流类型
align_to = rs.stream.color
# rs.align 执行深度帧与其他帧的对齐
align = rs.align(align_to)
'''
获取图像帧与相机参数
'''
# 等待获取图像帧,获取颜色和深度的框架集
frames = pipeline.wait_for_frames() # frames.get_depth_frame()是640x360深度图像
# 获取对齐帧,将深度框与颜色框对齐
aligned_frames = align.process(frames)
# 获取对齐帧中的的depth帧
aligned_depth_frame = aligned_frames.get_depth_frame() # aligned_depth_frame是640x480深度图像
# 获取对齐帧中的的color帧
aligned_color_frame = aligned_frames.get_color_frame()
# 将images转为numpy arrays
# RGB图
color_image = np.asanyarray(aligned_color_frame.get_data())
# 深度图(默认16位)
depth_image = np.asanyarray(aligned_depth_frame.get_data())
results = model(color_image)
boxs= results.pandas().xyxy[0].values
#boxs = np.load('temp.npy',allow_pickle=True)
dectshow(color_image, boxs, aligned_depth_frame)
# Apply colormap on depth image (image must be converted to 8-bit per pixel first)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)
# Stack both images horizontally
images = np.hstack((color_image, depth_colormap))
# Show images
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
key = cv2.waitKey(1)
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
finally:
# Stop streaming
pipeline.stop()
运行效果如下:
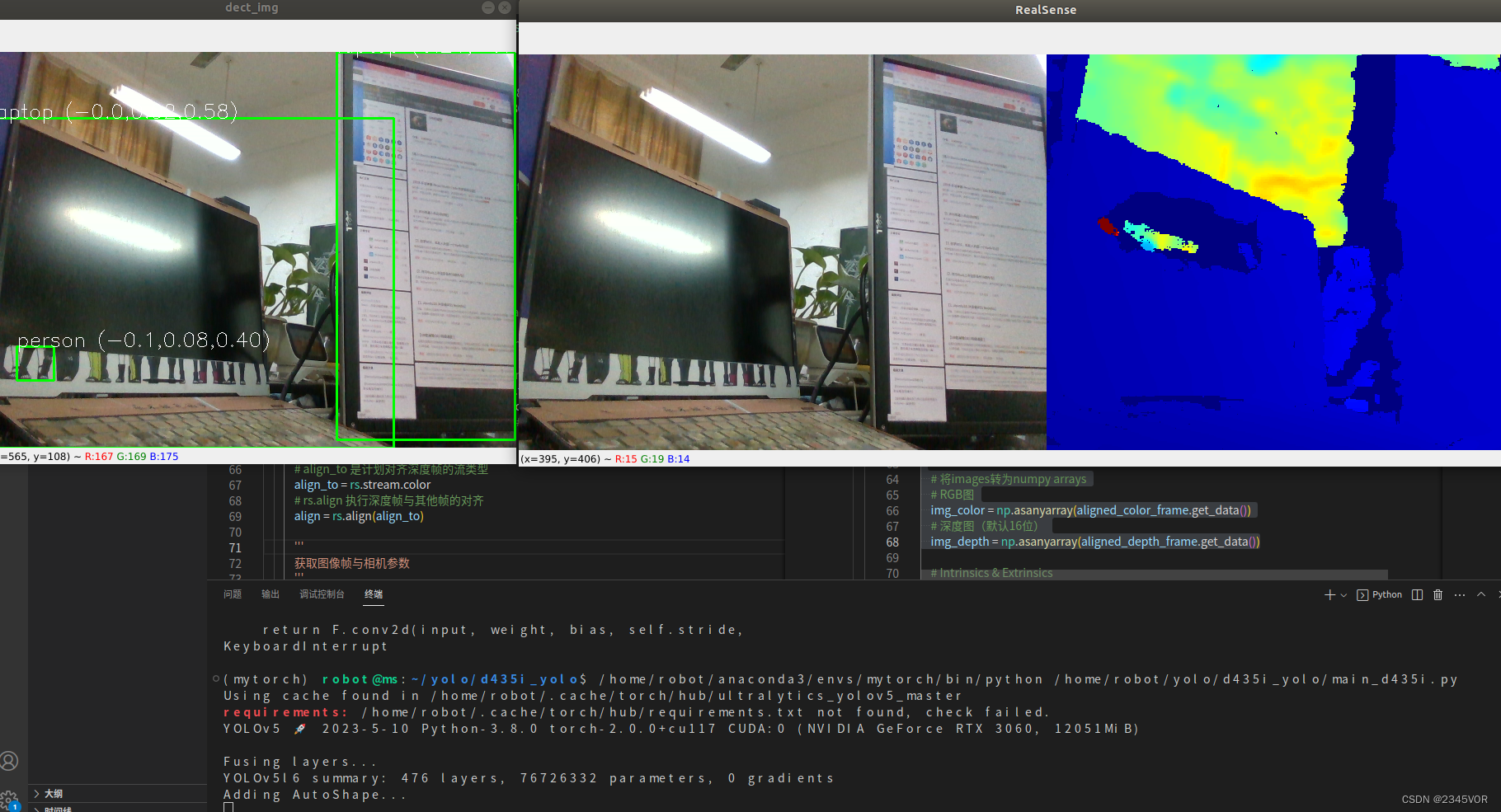
这个程序需要说明的是像素坐标的中点是float形式,而get_distance(x, y)函数的参数是int形式,需要进行强制转换。