文章目录
- 术语介绍
- 试验准备
- 场地要求
- 环境要求
- 精度要求
- 边界车辆&路沿石
- 试验方法
- 能力试验
- 双边界车辆平行车位
- 白色标线平行车位
- 双边界车辆垂直车位
- 白色标线垂直车位
- 方柱垂直车位
- 双边界车辆斜向车位
- 白色标线斜向车位
- 新功能评价
- 平行车位远程操控泊入泊出试验
- 垂直车位远程操控泊入泊出试验
- 用户手册评价
术语介绍
1. 智能泊车辅助(Intelligent Parking Assist - IPA) —— 在车辆泊车时,自动检测泊车空间并为驾驶员提供泊车指示和/或方向控制等辅助功能。
2. 边界车辆 —— 限制车位前方、后方(左方、右方)边界的车辆。
3. IPA车辆 —— 配备有 IPA 系统的车辆。 IPA 车辆的长用 X表示, IPA 车辆的宽用 Y表示(不含后视镜)。
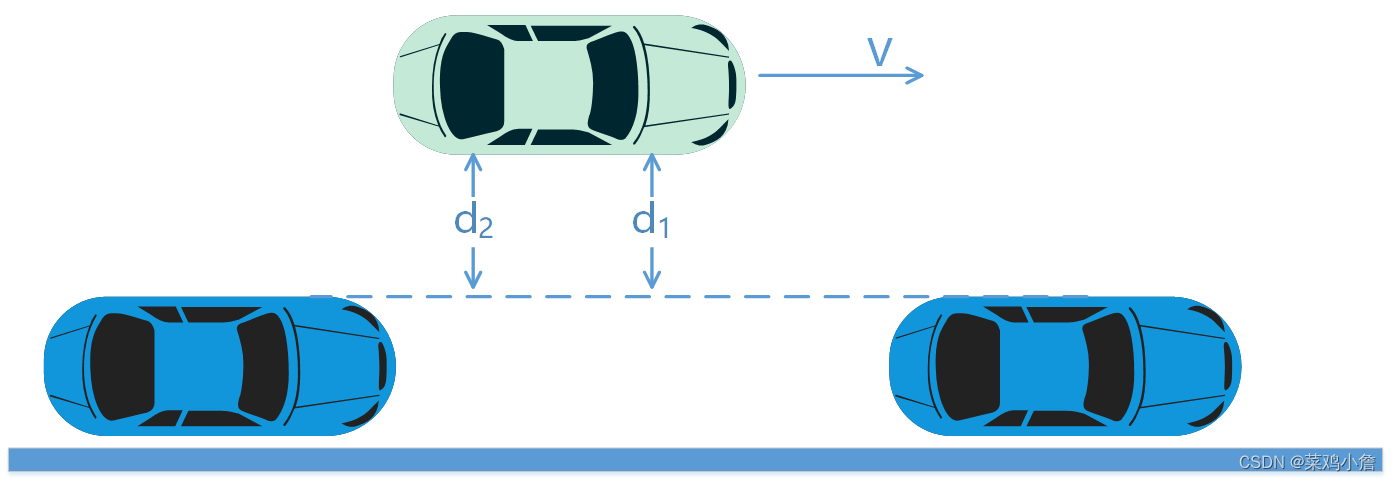
4. 横向间距 d1,d2 —— IPA 车辆靠停车位一侧的前后轮轮胎最外侧接地点与车位外边界的距离,不含两车后视镜。图示为横向间距示意图。
5. 揉库次数 —— IPA车辆泊车过程中,由档位切至 R档且车辆运动计为第一次揉库,揉库过程中档位由 R档切换至 D档或由 D档切换至 R档,分别计为一次揉库。
试验准备
场地要求
1)试验场地应为平整、干燥的沥青路面或水泥路面,无可见的潮湿处;无明显的凹坑、裂缝等不良情况,其水平平面度应小于 1% ;
2)试验过程中,墙壁、辅助试验设备及其他非试验物体(杂物)应从试验区域拆除,以排除其反射(声波反射和 /或电磁反射)引起的干涉;
3)车位标线应清晰可见,无破损。
环境要求
1)气候条件良好,无降雨、降雪、冰雹、扬尘等恶劣天气情况;
2)气温为 5℃~42 ℃;
3)风速应低于 5m/s s;
4)试验应在均匀的自然光照条件下进行,除非制造厂商对光照度要求的下限值更低,光照度不小于2000lux ;太阳高度要超过水平线 15° ;试验道路无明显阴影,车辆不能朝向或背离太阳行驶;水平能见度应在 1000m 以上;
5)环境温度、风速等环境参数每 10 分钟记录一次。
精度要求
测试过程使用的所有设备要满足动态数据的采样及存储要求,采样和存储频率至少为100Hz 。其中数据采集精度必须满足以下要求:
1)速度 精0.1km/h0.1km/h;
2)位置精度 0.02m 。
边界车辆&路沿石
可使用 M1 类乘用车作为边界车辆,也可使用与 M1 类乘用车具有相同反射特性的假车作为边界车辆。
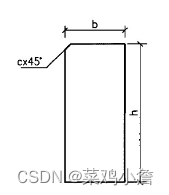
路沿石使用 TF 型路沿(参考城市道路 -路缘石图集 05MR404 ),路沿示意图如图所示,离地高度h范围为 [10cm, 20cm],宽度 b范围为 [28cm, 32cm],倒角 c范围为 [45°, 90° ]。
试验方法
能力试验
每个试验工况最多进行3 次试验,若3 次中有2 次识别到车位并完成泊车,则视为该工况通过试验,取2 次试验中结果较好的1 次进行评分;若前2 次试验均能识别到车位并完成泊车,则不进行第3 次试验。若3 次试验中有2 次及2 次以上车辆不识别车位或不能完成泊车,则该工况未通过试验。对于下述的泊车能力试验,若无特别说明,需满足以下有效性要求:
(1)IPA 车辆搜索车位过程中车速为10±2km/h;
(2)IPA 车辆横向间距d1、d2 误差为1.2±0.2 m;
(3)如果IPA 车辆无纵向控制功能,IPA 车辆泊车速度应不超过5km/h;
(4)泊车能力试验期间,行车轨迹应避免与IPA 所检测到的物体发生碰撞。
双边界车辆平行车位
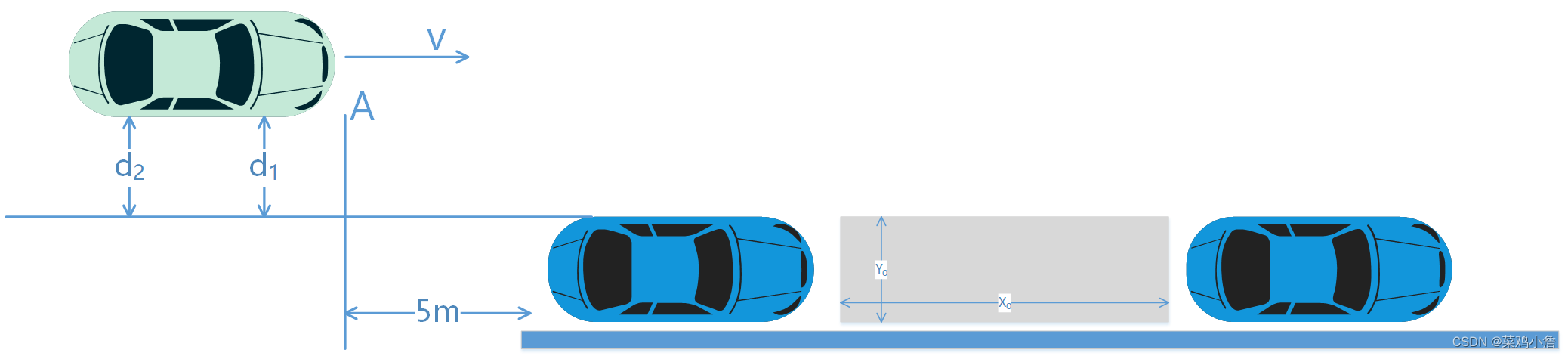
试验场景 —— 车位由两辆边界车辆和路沿石限制,边界车辆在相同方向对齐,并相互平行,车位长度方向的边界线由边界车辆的最外沿切线构成,如图所示。根据车位的长度把车位分为中车位,小车位。

试验时,按照下表所列的工况,按照车位由大到小的顺序进行试验。
| 车位大小 | 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 中 | 0.5*(2X+max{0.7m, 0.15X}+min{0.25X, 1.5m}) | Y+0.2 | 10 | 1.2 |
| 小 | X+max(0.7, 0.15X) | Y+0.2 | 10 | 1.2 |
试验方法
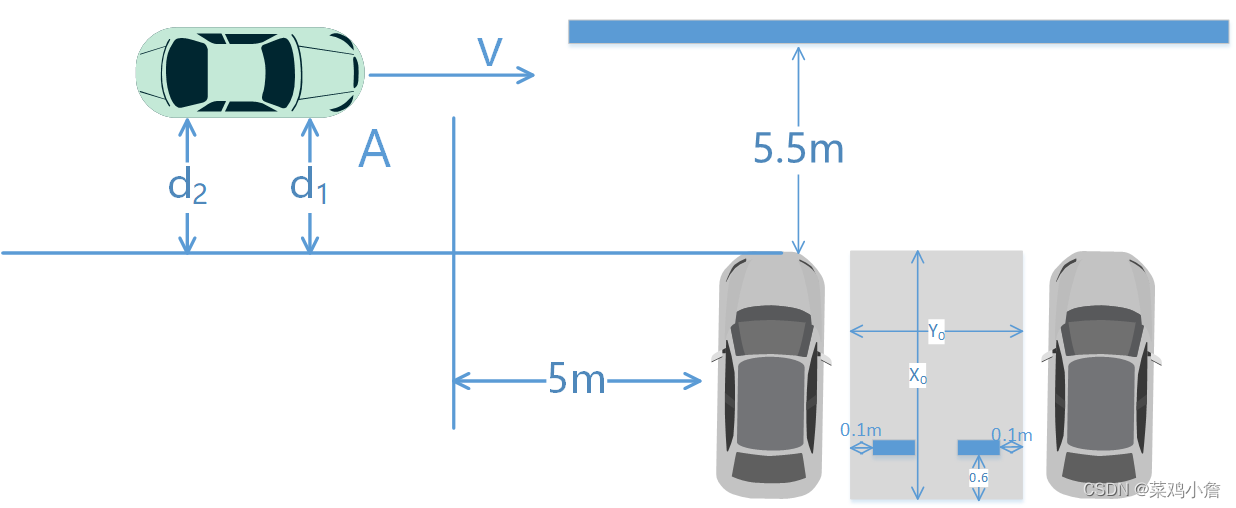
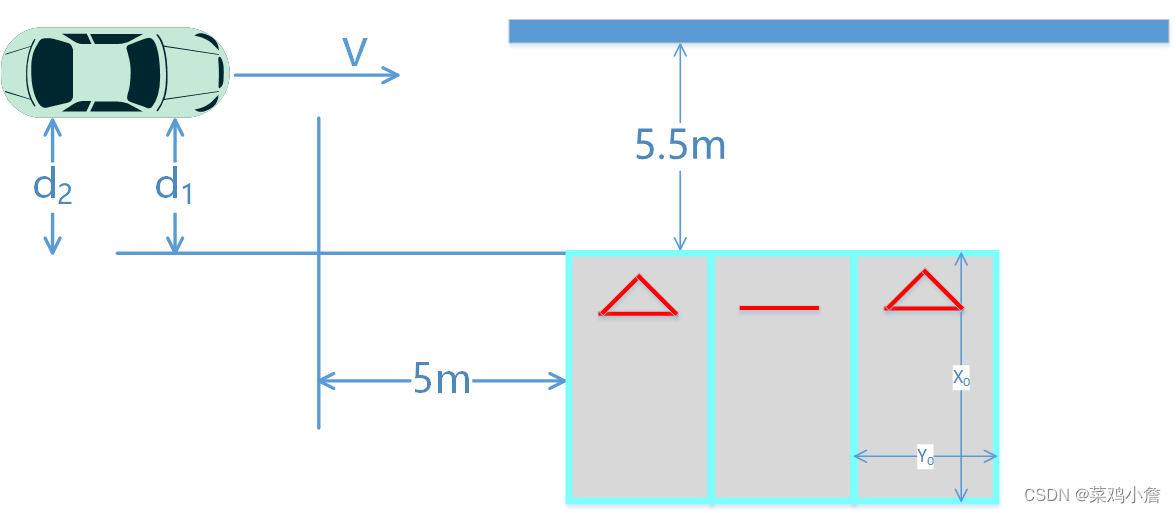
(1)启动车辆,开启IPA功能,驾驶IPA车辆行驶至A点,在A点时IPA车辆车速V和横向间距d1、d2满足上表要求,搜索车位过程中IPA车辆与目标车位横向间距d1、d2为1.2m,搜索车速为10km/h。试验场景如图所示。选择右侧目标车位进行试验。
(2)IPA车辆提示搜索到车位,或者IPA检测到系统故障,或者IPA车辆驶过目标车位后直至搜索不到目标车位,则驾驶员制动;
(3)IPA车辆提示搜索到车位,驾驶员根据提示进行泊车操作。如果IPA车辆无纵向控制功能,由驾驶员控制泊车车速不大于5km/h,并进行换档操作;如果IPA车辆有纵向控制功能,则由IPA车辆自主控制泊车车速和档位;
(4)IPA车辆发出结束指令或接管请求,或者与边界车辆碰撞则结束本次试验;
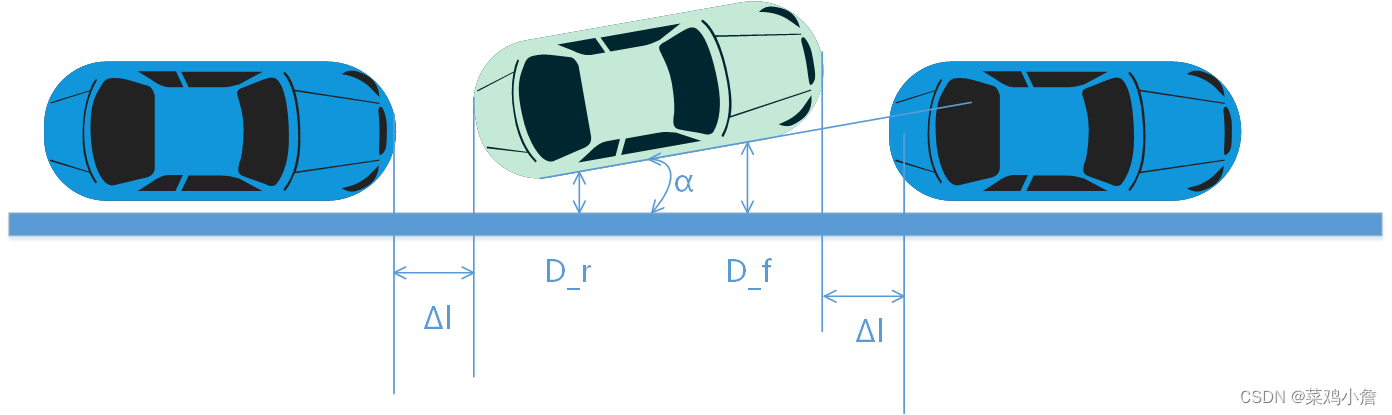
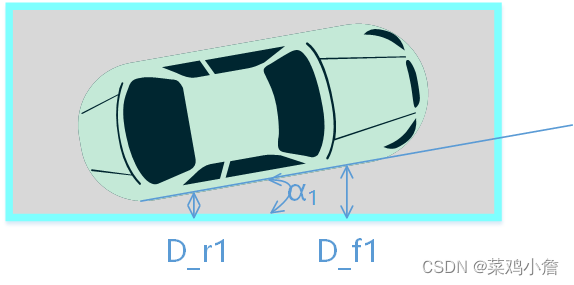
(5)试验完成后,记录揉库次数,测量IPA 车辆前、后车轮外侧接地点与目标车位的路沿石距离D_r、D_f、并由此计算车身与车位边界的夹角α(如图所示)。
白色标线平行车位
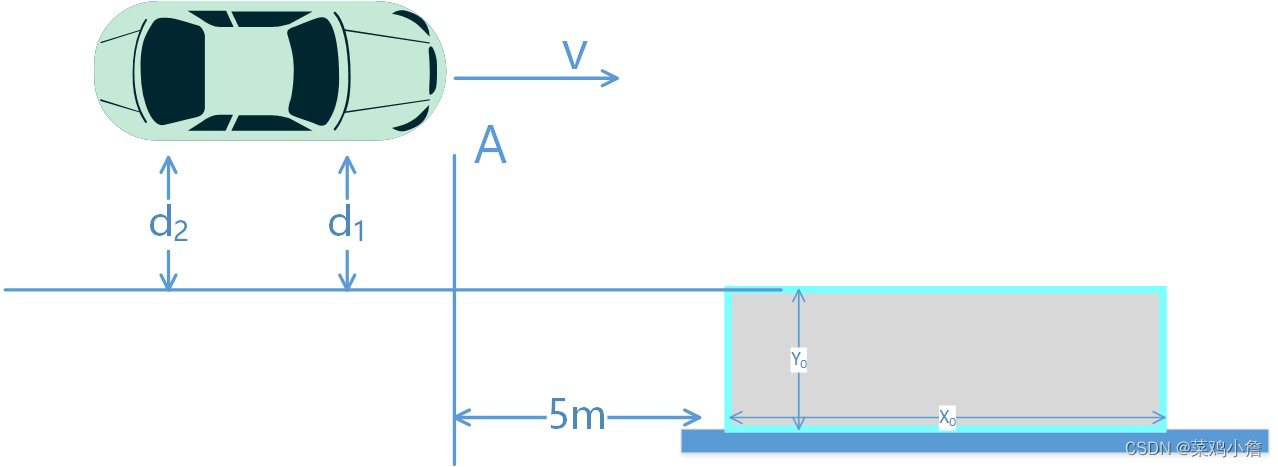
试验场景 —— 车位由白色标线和路沿石构成,线宽15cm。如图所示,车位的长度X0=6.0m,车位的宽度Y0=2. 4m。车位长度,宽度均为车位标线内侧距离。车位范围内不能有任何标线及其他障碍物。
试验时,按照下表所列的工况进行试验。
| 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 6.0 | 2.4 | 10 | 1.2 |
试验方法
(1)同双边界车辆平行车位泊车能力试验方法,试验场景如图所示。选择右侧目标车位进行试验。
试验完成后,记录揉库次数,测量IPA 车辆前、后车轮外侧接地点与车位边界线内侧的距离D_r1、D_f1,并计算车辆与车位边界线的夹角α1(如图所示)。
双边界车辆垂直车位
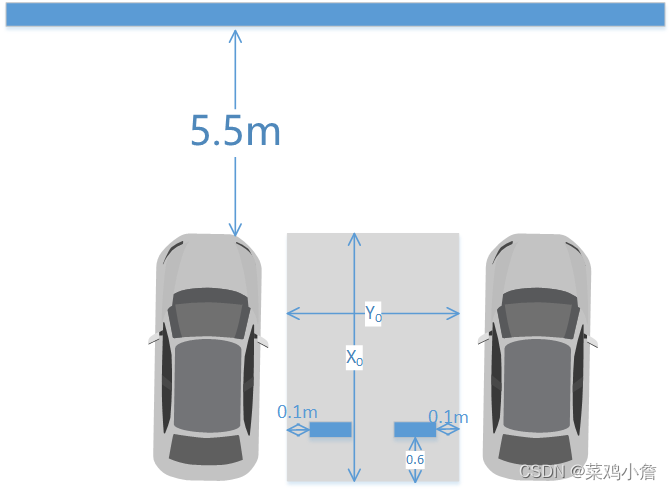
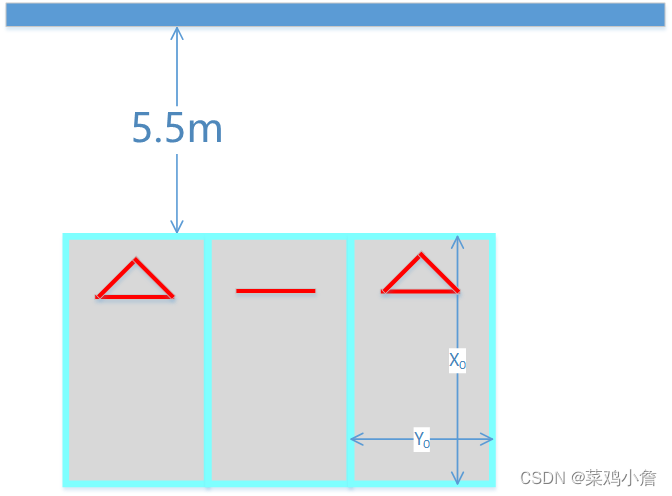
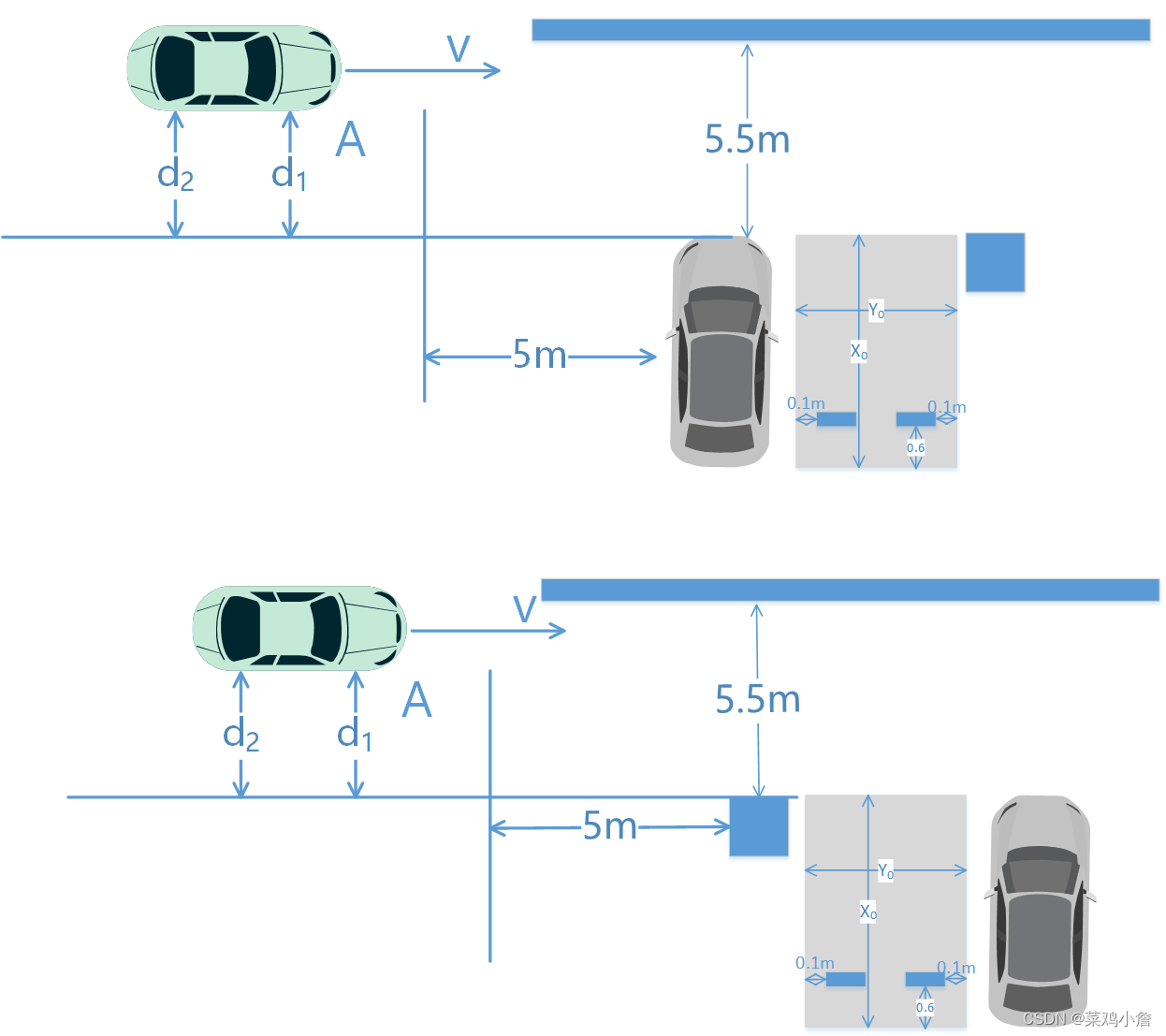
试验场景 —— 车位由两辆边界车辆限制,边界车辆在相同方向对齐,并相互平行,车位宽度方向的边界线由边界车辆的最外沿(不含后视镜)切线构成,在车位前端5.5m 处放置一段长度为4 - 5m,高度为1.5 - 1.8m的障碍物,限制垂直泊车的前部泊车空间,在距离目标车位底端0.6m,距离边界车0.1m 处放置2 个挡车器,挡车器长度为50 - 60cm,宽度为12 - 16cm,高度为10 - 12cm,如图所示。车位的长度X0=X,车位的宽度Y0=Y+ΔY。ΔY 根据具体车位大小不同,中小车位的ΔY 分别为1.0m、0.8m。
试验时,按照下表所列的工况,按照车位由大到小的顺序进行试验。
| 车位大小 | 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 中 | X | Y+1.0 | 10 | 1.2 |
| 小 | X | Y+0.8 | 10 | 1.2 |
试验方法
(1)同双边界车辆平行车位泊车能力试验方法。试验场景如图所示。随机选择左侧或右侧目标车位进行试验,试验过程不得更换目标车位相对IPA测试车辆方向。
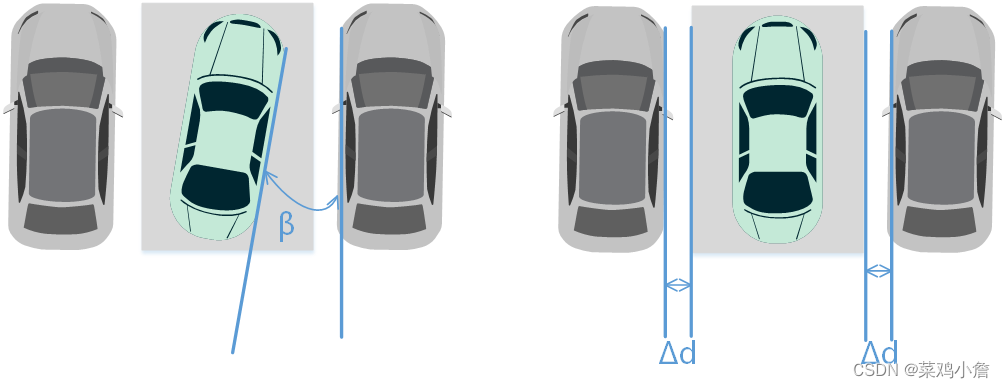
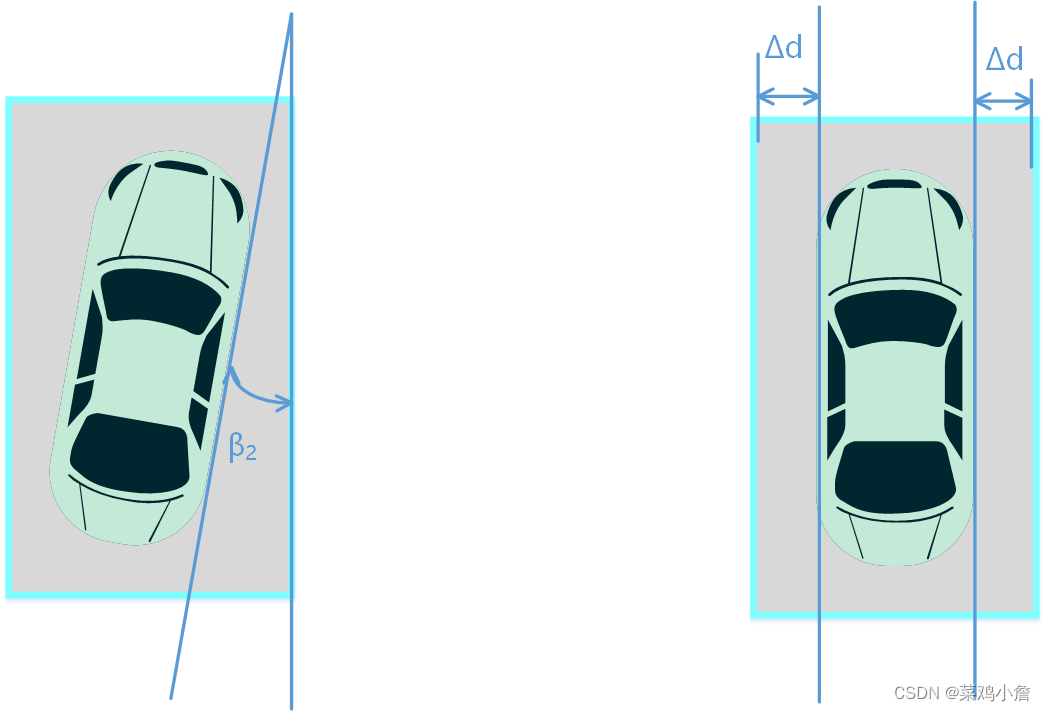
(2)试验完成后,记录揉库次数,测量IPA 车辆前后轮轮胎外侧接地点与边界车辆外边缘的距离,判断IPA 车辆是否停在目标区域内,计算偏角β。IPA 车辆与两侧边界车辆分别相距Δd 的矩形区域称为目标区域。在垂直车位泊车能力试验工况中,中、小车位对应的Δd 的值分别为0.2m、0.1m。偏角β 及目标区域如图所示。
白色标线垂直车位
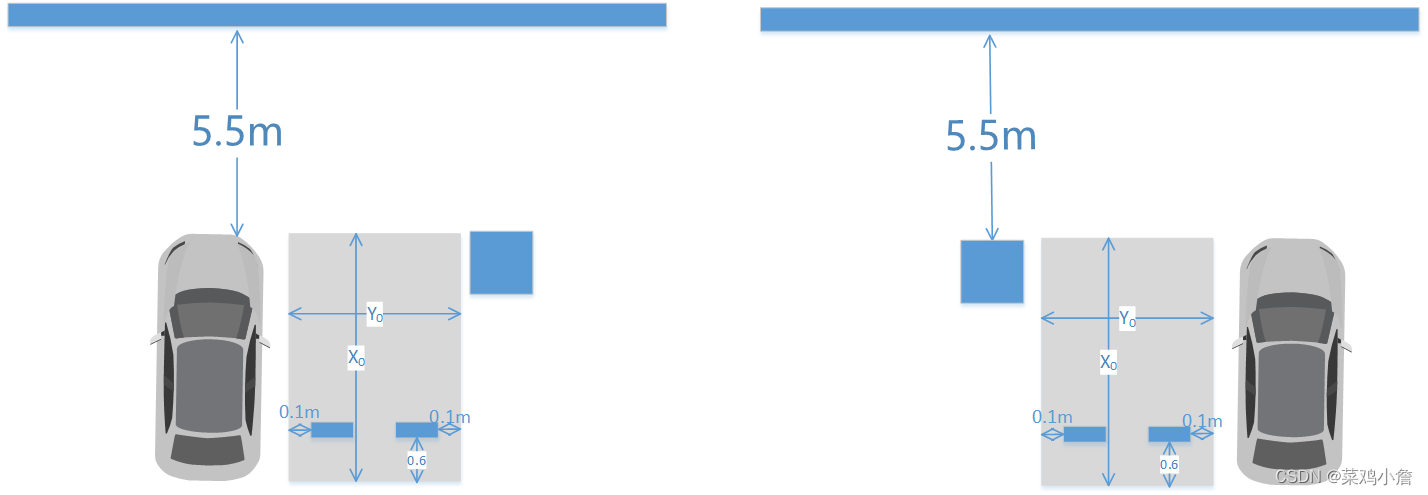
试验场景 —— 采用三个连续的标线垂直车位进行试验。在不相邻的左右标线车位距离车位前端标线内侧0.5m 处放置尺寸为48cm×16cm×30cm 的“A”型停车锁。试验时中间车位停车锁收到地面,两侧车位停车时展开立起。考查IPA 车辆是否能准确识别并泊入无障碍物的目标停车位。车位由白色标线构成,线宽15cm。如图所示,车位的长度X0=5.3m,宽度Y0=2.4m。在车位前端5.5m 处放置一段长度为4 - 5m,高度为1.5 - 1.8m 的障碍物,限制垂直泊车的前部泊车空间。
试验时,按照下表所列的工况,按照车位由大到小的顺序进行试验。
| 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 5.3 | 2.4 | 10 | 1.2 |
试验方法
(1)同双边界平行车位泊车能力试验方法。试验场景如图所示。随机选择左侧或右侧目标车位进行试验,试验过程不得更换目标车位相对IPA测试车辆方向。
(2)试验完成后,记录揉库次数,测量IPA 车辆前后轮轮胎外侧接地点与车位边界线内侧的距离,判断IPA 车辆是否停在目标区域内,计算车辆与车位边界线的夹角β2。IPA 车辆与两侧车位边界分别相距Δd,与车位前后端标线内侧重叠的矩形区域称为目标区域。在白色标线垂直车位泊车能力试验工况中,Δd 的值为0.1m。
方柱垂直车位
试验场景 —— 车位由一辆边界车辆与一个截面尺寸为0.7m*0.7m,高度为1.9m 的方柱限制,方柱分别位于边界车辆的左、右边Y+0.8m 处,车位前边缘后方0.5 米处(Y 为测试车的车宽)。方柱与车位宽度方向的边界线由边界车辆的最外沿(不含后视镜)切线与方柱边缘构成。在车位前端5.5m 处放置一段长度为4 - 5m,高度为1.5 - 1.8m 的障碍物,限制垂直泊车的前部泊车空间。在距离目标车位底端0.6m,距离边界车与方柱0.1m 处放置2 个挡车器,挡车器长度为50 - 60cm,宽度为12 - 16cm,高度为10 - 12cm,如图所示。车位的长度X0=X,车位的宽度Y0=Y+0.8m。
试验时,按照下表所列的工况,按照车位由大到小的顺序进行试验。
| 方柱位置 | 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 方柱在左 | X | Y+0.8 | 10 | 1.2 |
| 方柱在右 | X | Y+0.8 | 10 | 1.2 |
试验方法
(1)同双边界平行车位泊车能力试验方法。试验场景如图所示。随机选择左侧或右侧目标车位进行试验,试验过程不得更换目标车位相对IPA测试车辆方向。
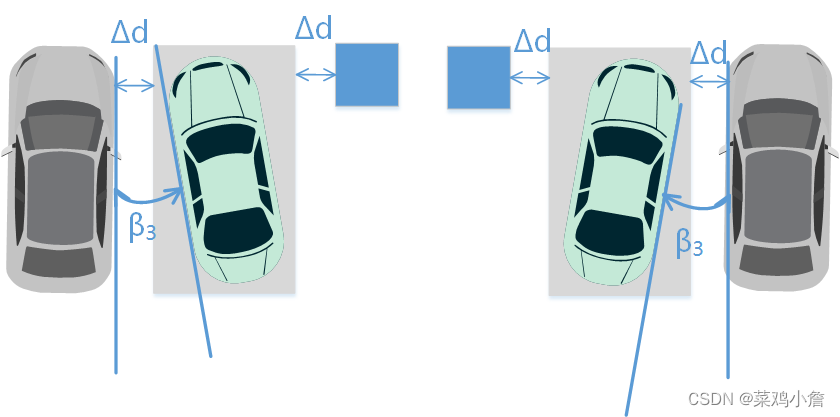
(2)试验完成后,记录揉库次数,测量IPA 车辆前后轮轮胎外侧接地点与边界车辆外边缘的距离,判断IPA 车辆是否停在目标区域内,计算偏角β3。IPA 车辆与边界车辆及方柱分别相距Δd 的矩形区域称为目标区域。在方柱垂直车位泊车能力试验工况中,Δd 的值为0.1m。
双边界车辆斜向车位
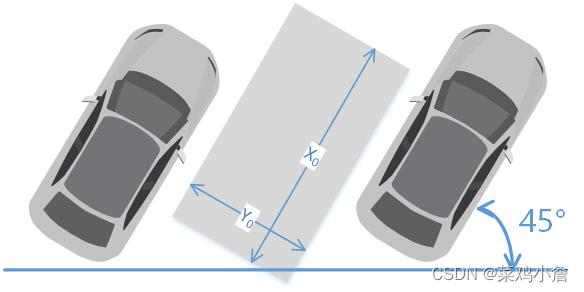
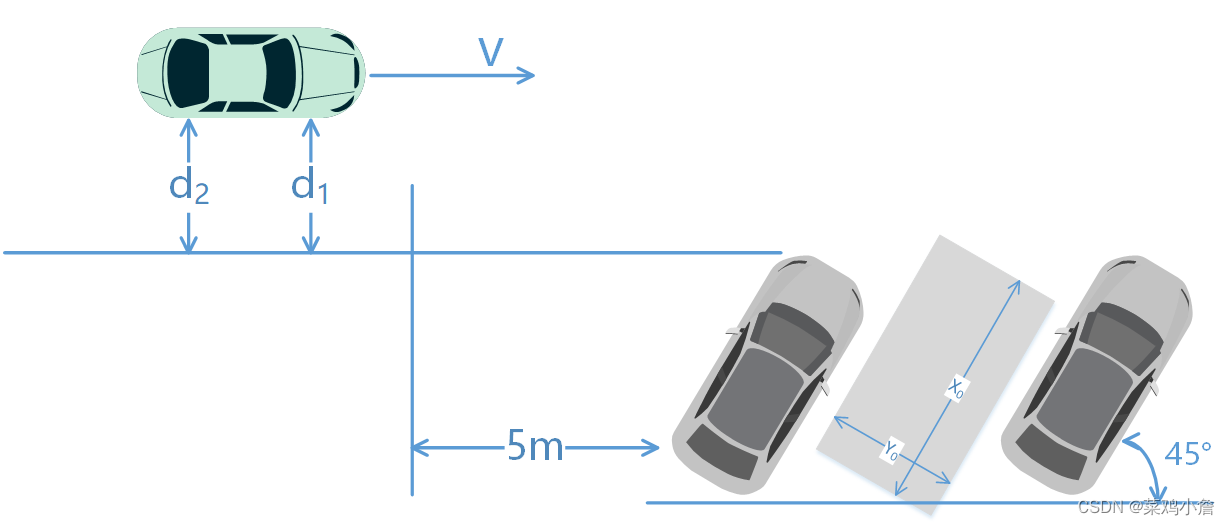
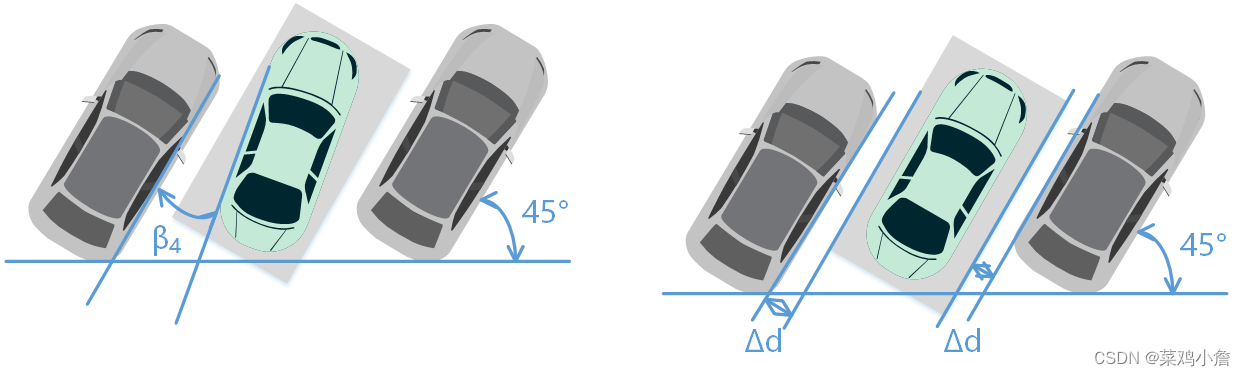
试验场景 —— 双边界车辆斜向车位由两辆边界车辆限制,边界车辆相互平行,边界车辆与路沿石倾斜角为45°,如图所示。车位的长度X0=X+Y,车位的宽度Y0=Y+ΔY。ΔY 根据具体车位大小不同,中小车位的ΔY 分别为1.0m、0.8m。
试验时,按照下表所列的工况,按照车位由大到小的顺序进行试验。
| 车位大小 | 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 中 | X+Y | Y+1.0 | 10 | 1.2 |
| 小 | X+Y | Y+0.8 | 10 | 1.2 |
试验方法
(1)同双边界车辆平行车位泊车能力试验方法。试验场景如图所示。选择右侧目标车位进行试验。
(2)试验完成后,记录揉库次数,测量IPA车辆前后轮轮胎外侧接地点与边界车辆外边缘的距离,判断IPA车辆是否停在目标区域内,计算偏角β4。IPA车辆与两侧边界车辆分别相距Δd的区域称为目标区域。在斜向车位泊车能力试验工况中,对于双边界斜向中车位,Δd的值为0.2m,对于双边界斜向小车位,Δd的值为0.1m。
白色标线斜向车位
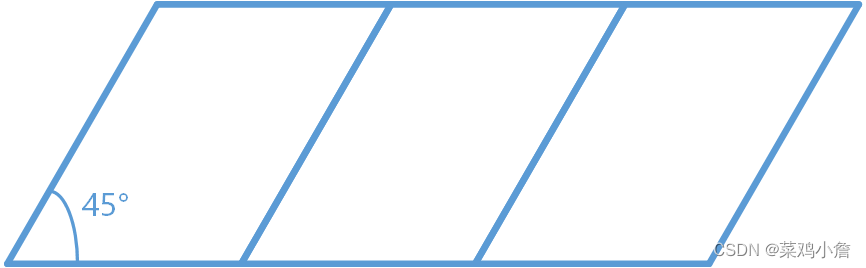
试验场景 —— 车位由白色标线构成,线宽15cm。如图所示,车位的长度X0=7.0m,宽度Y0=2.4m。车位范围内无其他障碍物。
试验时,按照下表所列的工况进行试验。
| 车位长X0(m) | 车位宽Y0(m) | 搜索车速V(km/h) | 横向间距d |
| 7.0 | 2.4 | 10 | 1.2 |
试验方法
(1)同双边界车辆平行车位泊车能力试验方法。试验场景如图22所示。选择右侧目标车位进行试验。
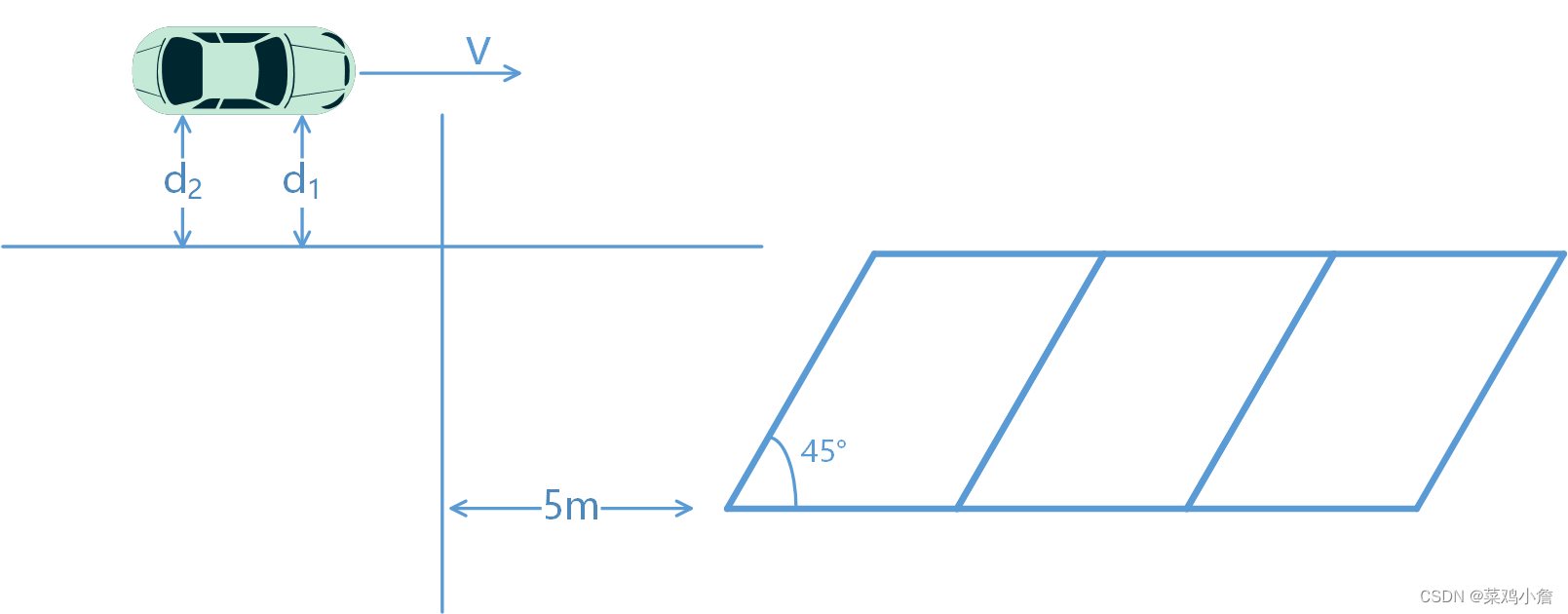
(2)试验完成后,记录揉库次数,测量IPA 车辆前后轮轮胎外侧接地点与车位边界线内侧的距离,判断IPA 车辆是否停在目标区域内,计算车辆与车位边界线的夹角β5。在白色标线斜向车位泊车能力试验工况中,Δd 的值为0.1m。

新功能评价
平行车位远程操控泊入泊出试验
试验场景 —— 试验使用双边界车辆平行小车位,按照下表所列的工况进行试验。
| 试验场景 | 车位长X0(m) | 车位宽Y0(m) | 出库车速(km/h) |
| 平行车位 | X+max{0.7, 0.15X} | Y+0.2 | ≤5 |
试验方法
(1)启动车辆,开启IPA功能,进行平行车位搜索,搜索车位过程中IPA车辆与目标车位横向间距d1、d2为1.2m,车速为10km/h;
(2)待系统提示搜索到车位,系统会发出停车提示,按照系统提示停车;驾驶员下车,在车外远程操控车辆完成泊车。
(3)泊车完成后,在车外继续操控车辆完成出库
(4)IPA 车辆发出结束指令或接管请求,或者与边界车辆或障碍物碰撞则结束试验;
(5)应使用同一车位进行 1次试验。
试验要求
(1)IPA 车辆搜索车位过程中车速为 10±2km/h h;
(2)IPA 车辆横向间距d1、d2 误差为 ±0.2 m;
(3)泊出期间,行车轨迹应避免与 IPA 所检测到的物体发生碰撞。
垂直车位远程操控泊入泊出试验
试验场景 —— 试验使用双边界车辆垂直车位,按照下表所列的工况进行试验。
| 试验场景 | 车位长X0(m) | 车位宽Y0(m) | 出库车速 | 横向间距(m) |
| 垂直车位 | X | Y+0.8 | 10 | 1.2 |
试验方法
(1)启动车辆,开启IPA功能,进行平行车位搜索,搜索车位过程中IPA车辆与目标车位横向间距d1、d2为1.2m,车速为10km/h;
(2)待系统提示搜索到车位,系统会发出停车提示,按照系统提示停车。若驾驶员在车外远程操控车辆,IPA 系统不能实现转向功能,则驾驶员将车辆驾驶至车位正前方后驾驶员下车,驾驶员在车外远程操控车辆完成泊车。若驾驶员在车外远程操控车辆,IPA 系统能实现转向功能,则系统提示搜到车位后驾驶员下车,驾驶员在车外远程操控车辆完成泊车。
(3)泊车完成后,在车外继续操控车辆完成出库
(4)IPA 车辆发出结束指令或接管请求,或者与边界车辆或障碍物碰撞则结束试验;
(5)应使用同一车位进行 1次试验。
试验要求
(1)IPA 车辆搜索车位过程中车速为 10±2km/h h;
(2)IPA 车辆横向间距d1、d2 误差为 ±0.2 m;
(3)泊出期间,行车轨迹应避免与 IPA 所检测到的物体发生碰撞。
用户手册评价
考察随车用户手册内关于L2辅助泊车功能的描述、警告、提示信息是否完整,是否存在歧义。主要考察的内容有:
| 考察内容 | 备注 |
|---|---|
| 智能泊车辅助系统定义 | 定义是否明确 |
| 驾驶员责任描述 | 描述是否明确 |
| L2智能泊车辅助功能使用条件描述 | 是否明确 |
| L2智能泊车辅助功能局限性描述(警告信息) | 是否明确 |