- 官方源码(Pytorch实现) : https://github.com/apple/ml-cvnets
-
原文链接:https://blog.csdn.net/qq_37541097/article/details/126715733
- 霹雳吧啦Wz从ml-evnets仓库中剥离的代码: deep-learning-for-image-processing/pytorch_classification/MobileViT at master · WZMIAOMIAO/deep-learning-for-image-processing · GitHub
- MobileViT对应博文: MobileViT模型简介_太阳花的小绿豆的博客-CSDN博客
1. Transformer模型存在的问题
- Transformer参数多,算力要求高,很难部署到移动端。
- Transformer缺少空间偏置。计算某个token的attention时如果将其他token的顺序打乱对最终结果没有任何影响。但在图像数据中,空间信息是很重要且有意义的。为了解决这个问题,常见的方法是加上位置偏置(position bias)/位置编码,比如Vision Transformer中使用的绝对位置偏置,Swin Transformer中的相对位置偏置,加上位置偏置虽然在一定程度上解决了空间位置的信息丢失的问题,但又引入了一个新的问题。迁移到别的任务上时,位置偏执信息往往需要调整。
- Transformer迁移到其他任务(输入图像分辨率发生改变)比较繁琐
- Transformer模型很难训练(需要更多的训练数据,需要迭代更多的epoch,需要更大的正则项(L2正则),需要更多的数据增强(且对数据增强很敏感))
2. Vision Transformer结构
MobileViT论文中绘制的Standard visual Transformer。首先将输入的图片划分成一个个Patch,然后通过线性变化将每个Patch映射到一个一维向量中(视为一个个Token),接着加上位置偏置信息(可学习参数),再通过一系列Transformer Block,最后通过一个全连接层得到最终预测输出。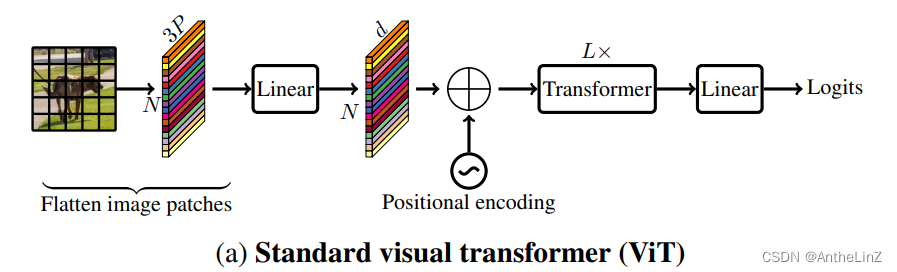
2. MobileViT结构

如图 b 所示的 MobileViT 块的作用是使用包含较少参数的输入张量学习局部和全局信息。MobileViT 应用一个 n×n 标准卷积层,然后是逐点(1×1)卷积层来特征提取。n×n 卷积层编码局部空间信息,而逐点卷积通过学习输入通道的线性组合将张量投影到高维空间。
总而言之, MobileViT 使用标准卷积和 transformer 分别学习局部和全局表示,使得MobileViT 既具有类似卷积的属性,又同时允许全局处理。
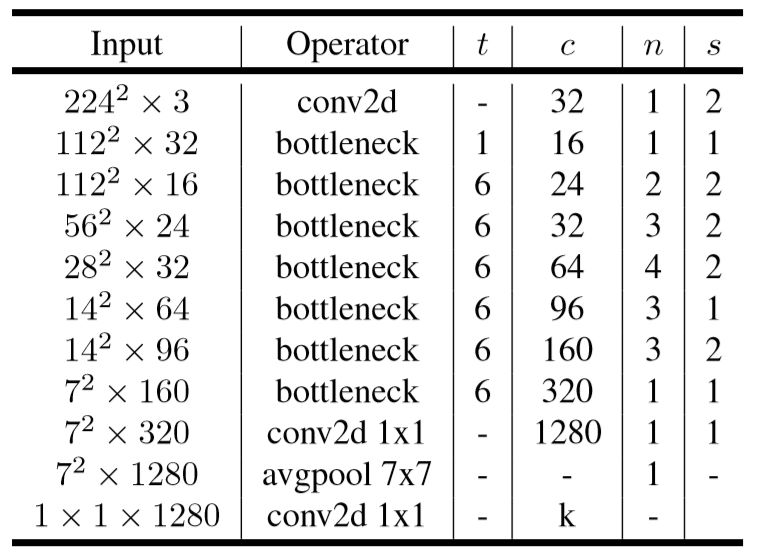
MobileViT结构:普通卷积,MV2(MobiletNetV2中的Inverted Residual block),MobileViT block,全局池化以及全连接层共同组成。
mobileNetV2
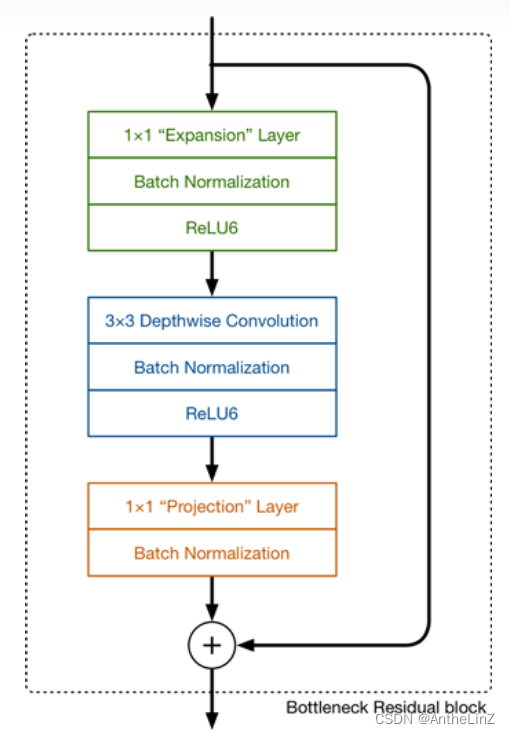
Expansion layer是使用1x1卷积将低维空间映射到高维空间(扩大通道数),这里Expansion有一个超参数是维度扩展几倍,可以根据实际情况来做调整的,默认值是6,也就是扩展6倍。
Projection layer也是使用1x1卷积,他的目的是希望把高维特征映射到低维空间去(减小通道数)。需要注意的是residual connection是在输入和输出的部分进行连接。另外,前面已经说过,因为从高维向低维转换,使用ReLU激活函数可能会造成信息丢失或破坏,所以在Projection convolution这一部分,我们不再使用ReLU激活函数而是使用线性激活函数。
3.模型代码
class MobileViTBlock(nn.Module):
def __init__(self, dim, depth, channel, kernel_size, patch_size, mlp_dim, dropout=0.):
super().__init__()
self.ph, self.pw = patch_size
self.conv1 = conv_nxn_bn(channel, channel, kernel_size)
self.conv2 = conv_1x1_bn(channel, dim)
self.transformer = Transformer(dim, depth, 4, 8, mlp_dim, dropout)
self.conv3 = conv_1x1_bn(dim, channel)
self.conv4 = conv_nxn_bn(2 * channel, channel, kernel_size)
def forward(self, x):
y = x.clone()
# Local representations
x = self.conv1(x)
x = self.conv2(x)
# Global representations
_, _, h, w = x.shape
x = rearrange(x, 'b d (h ph) (w pw) -> b (ph pw) (h w) d', ph=self.ph, pw=self.pw)
x = self.transformer(x)
x = rearrange(x, 'b (ph pw) (h w) d -> b d (h ph) (w pw)', h=h//self.ph, w=w//self.pw, ph=self.ph, pw=self.pw)
# Fusion
x = self.conv3(x)
x = torch.cat((x, y), 1)
x = self.conv4(x)
return x
import torch
import torch.nn as nn
from einops import rearrange
def conv_1x1_bn(inp, oup):
return nn.Sequential(
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
nn.SiLU()
)
def conv_nxn_bn(inp, oup, kernal_size=3, stride=1):
return nn.Sequential(
nn.Conv2d(inp, oup, kernal_size, stride, 1, bias=False),
nn.BatchNorm2d(oup),
nn.SiLU()
)
class PreNorm(nn.Module):
def __init__(self, dim, fn):
super().__init__()
self.norm = nn.LayerNorm(dim)
self.fn = fn
def forward(self, x, **kwargs):
return self.fn(self.norm(x), **kwargs)
class FeedForward(nn.Module):
def __init__(self, dim, hidden_dim, dropout=0.):
super().__init__()
self.net = nn.Sequential(
nn.Linear(dim, hidden_dim),
nn.SiLU(),
nn.Dropout(dropout),
nn.Linear(hidden_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x):
return self.net(x)
class Attention(nn.Module):
def __init__(self, dim, heads=8, dim_head=64, dropout=0.):
super().__init__()
inner_dim = dim_head * heads
project_out = not (heads == 1 and dim_head == dim)
self.heads = heads
self.scale = dim_head ** -0.5
self.attend = nn.Softmax(dim = -1)
self.to_qkv = nn.Linear(dim, inner_dim * 3, bias = False)
self.to_out = nn.Sequential(
nn.Linear(inner_dim, dim),
nn.Dropout(dropout)
) if project_out else nn.Identity()
def forward(self, x):
qkv = self.to_qkv(x).chunk(3, dim=-1)
q, k, v = map(lambda t: rearrange(t, 'b p n (h d) -> b p h n d', h = self.heads), qkv)
dots = torch.matmul(q, k.transpose(-1, -2)) * self.scale
attn = self.attend(dots)
out = torch.matmul(attn, v)
out = rearrange(out, 'b p h n d -> b p n (h d)')
return self.to_out(out)
class Transformer(nn.Module):
def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout=0.):
super().__init__()
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(nn.ModuleList([
PreNorm(dim, Attention(dim, heads, dim_head, dropout)),
PreNorm(dim, FeedForward(dim, mlp_dim, dropout))
]))
def forward(self, x):
for attn, ff in self.layers:
x = attn(x) + x
x = ff(x) + x
return x
class MV2Block(nn.Module):
def __init__(self, inp, oup, stride=1, expansion=4):
super().__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = int(inp * expansion)
self.use_res_connect = self.stride == 1 and inp == oup
if expansion == 1:
self.conv = nn.Sequential(
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.SiLU(),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
else:
self.conv = nn.Sequential(
# pw
nn.Conv2d(inp, hidden_dim, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.SiLU(),
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.SiLU(),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
class MobileViTBlock(nn.Module):
def __init__(self, dim, depth, channel, kernel_size, patch_size, mlp_dim, dropout=0.):
super().__init__()
self.ph, self.pw = patch_size
self.conv1 = conv_nxn_bn(channel, channel, kernel_size)
self.conv2 = conv_1x1_bn(channel, dim)
self.transformer = Transformer(dim, depth, 4, 8, mlp_dim, dropout)
self.conv3 = conv_1x1_bn(dim, channel)
self.conv4 = conv_nxn_bn(2 * channel, channel, kernel_size)
def forward(self, x):
y = x.clone()
# Local representations
x = self.conv1(x)
x = self.conv2(x)
# Global representations
_, _, h, w = x.shape
x = rearrange(x, 'b d (h ph) (w pw) -> b (ph pw) (h w) d', ph=self.ph, pw=self.pw)
x = self.transformer(x)
x = rearrange(x, 'b (ph pw) (h w) d -> b d (h ph) (w pw)', h=h//self.ph, w=w//self.pw, ph=self.ph, pw=self.pw)
# Fusion
x = self.conv3(x)
x = torch.cat((x, y), 1)
x = self.conv4(x)
return x
class MobileViT(nn.Module):
def __init__(self, image_size, dims, channels, num_classes, expansion=4, kernel_size=3, patch_size=(2, 2)):
super().__init__()
ih, iw = image_size
ph, pw = patch_size
assert ih % ph == 0 and iw % pw == 0
L = [2, 4, 3]
self.conv1 = conv_nxn_bn(3, channels[0], stride=2)
self.mv2 = nn.ModuleList([])
self.mv2.append(MV2Block(channels[0], channels[1], 1, expansion))
self.mv2.append(MV2Block(channels[1], channels[2], 2, expansion))
self.mv2.append(MV2Block(channels[2], channels[3], 1, expansion))
self.mv2.append(MV2Block(channels[2], channels[3], 1, expansion)) # Repeat
self.mv2.append(MV2Block(channels[3], channels[4], 2, expansion))
self.mv2.append(MV2Block(channels[5], channels[6], 2, expansion))
self.mv2.append(MV2Block(channels[7], channels[8], 2, expansion))
self.mvit = nn.ModuleList([])
self.mvit.append(MobileViTBlock(dims[0], L[0], channels[5], kernel_size, patch_size, int(dims[0]*2)))
self.mvit.append(MobileViTBlock(dims[1], L[1], channels[7], kernel_size, patch_size, int(dims[1]*4)))
self.mvit.append(MobileViTBlock(dims[2], L[2], channels[9], kernel_size, patch_size, int(dims[2]*4)))
self.conv2 = conv_1x1_bn(channels[-2], channels[-1])
self.pool = nn.AvgPool2d(ih//32, 1)
self.fc = nn.Linear(channels[-1], num_classes, bias=False)
def forward(self, x):
x = self.conv1(x)
x = self.mv2[0](x)
x = self.mv2[1](x)
x = self.mv2[2](x)
x = self.mv2[3](x) # Repeat
x = self.mv2[4](x)
x = self.mvit[0](x)
x = self.mv2[5](x)
x = self.mvit[1](x)
x = self.mv2[6](x)
x = self.mvit[2](x)
x = self.conv2(x)
x = self.pool(x).view(-1, x.shape[1])
x = self.fc(x)
return x
def mobilevit_xxs(img_size=(256, 256), num_classes=1000):
dims = [64, 80, 96]
channels = [16, 16, 24, 24, 48, 48, 64, 64, 80, 80, 320]
return MobileViT((img_size[0], img_size[1]), dims, channels, num_classes=num_classes, expansion=2)
def mobilevit_xs(img_size=(256, 256), num_classes=1000):
dims = [96, 120, 144]
channels = [16, 32, 48, 48, 64, 64, 80, 80, 96, 96, 384]
return MobileViT((img_size[0], img_size[1]), dims, channels, num_classes=num_classes)
def mobilevit_s(img_size=(256, 256), num_classes=1000):
dims = [144, 192, 240]
channels = [16, 32, 64, 64, 96, 96, 128, 128, 160, 160, 640]
return MobileViT((img_size[0], img_size[1]), dims, channels, num_classes=num_classes)
def count_parameters(model):
return sum(p.numel() for p in model.parameters() if p.requires_grad)
if __name__ == '__main__':
img = torch.randn(5, 3, 256, 256)
vit = mobilevit_xxs(img_size=(256, 256))
out = vit(img)
print(out.shape)
print(count_parameters(vit))
vit = mobilevit_xs()
out = vit(img)
print(out.shape)
print(count_parameters(vit))
vit = mobilevit_s()
out = vit(img)
print(out.shape)
print(count_parameters(vit))
注意,输入图片不能是224x224,因为reshape时会报错,可以设置成256x256或其他。