- 1. 传感模块概述
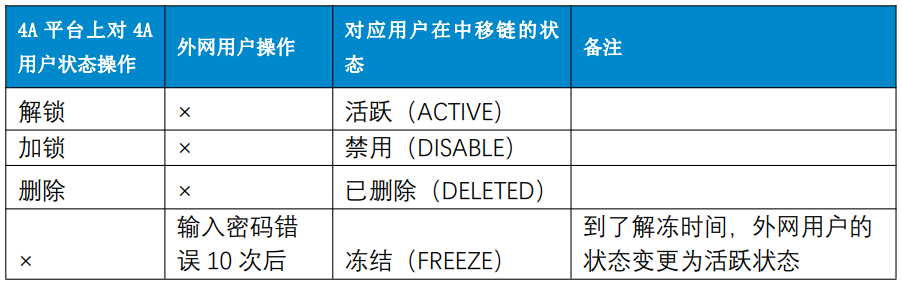
- 2. 可观测的传感量
- 3. 传感模块
- 3.1 运动传感模块
- 3.1.1 旋转和平移细分
- 旋转
- 平移
- 3.2 力传感模块
- 3.2.1 关节力和力矩细分
1. 传感模块概述
Simscape提供传感模块,通过改变模型的输入和输出,可以进行许多分析,比如可以进行机械臂逆运动学的分析,通过定义末端的轨迹和对关节力/力矩进行传感,可以得到时变的关节驱动的输入。又比如对机械臂进行正运动学分析,提前定义关节的运动,然后对轨迹进行分析。
2. 可观测的传感量

运动量:线性位置(x,y,z)和角度位置(α.β,γ)、以及它们的速度和加速度。线性位置可用于不同的坐标系,包括直角坐标系、球面坐标系和圆柱坐标系。角度变量可用于不同的格式,包括四元数、绕轴角度和变换矩阵。
力和力矩量:作用在关节上的动力、约束力和总的力和力矩,以及作用在关节外的外力和外力矩。
3. 传感模块
3.1 运动传感模块
-
各种joint:建立joint(关节) base和follower之间的运动传感。你可以传感运动副自带的量(比如转动副获得它的转角,移动副获得它的移动距离)。

-
transform sensor:可以建立任意两个坐标系之间的运动关系,最通用的一个模块。Transform Sensor
- 角度、角速度、角加速度
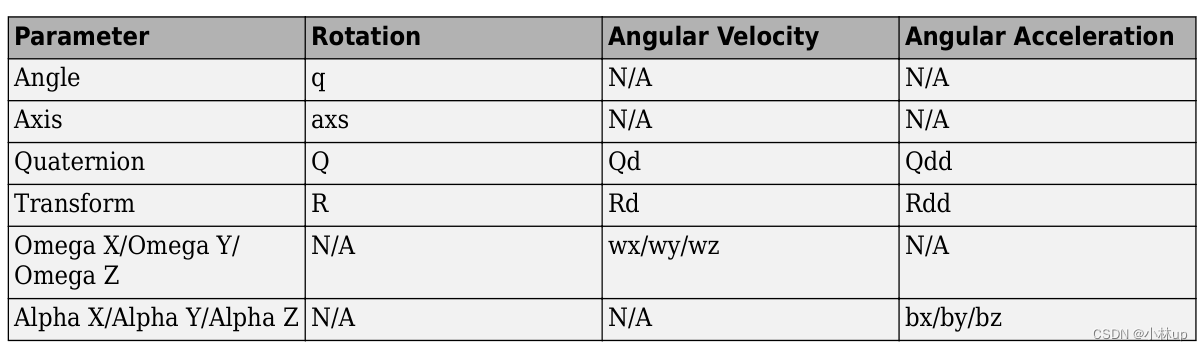
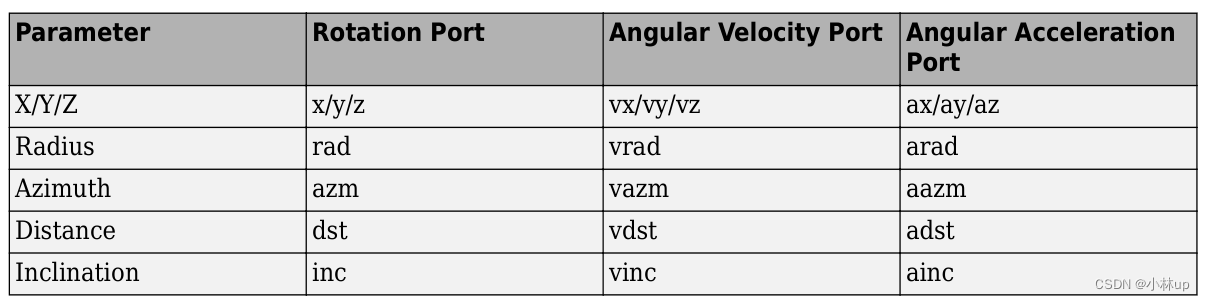
- 不同坐标下的表示
- 角度、角速度、角加速度
上面参数的后四行是在柱坐标和球坐标下表示的:
3.1.1 旋转和平移细分
旋转
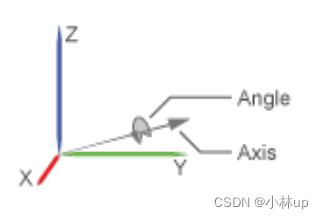
- 轴角:Angle Axis
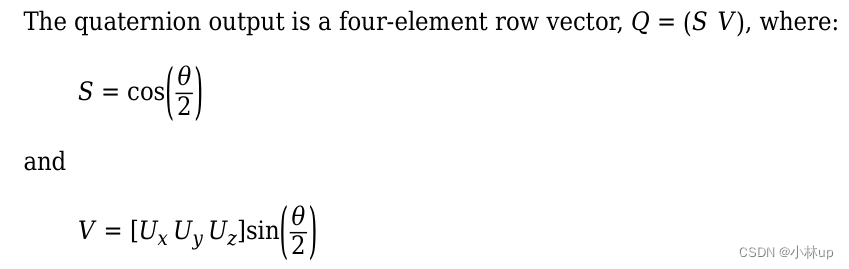
- 四元数:Quaternion
- 旋转矩阵:Transform

- 旋转序列:Rotation Sequence

可以自己定义旋转顺序。
平移
-
笛卡尔坐标系
-
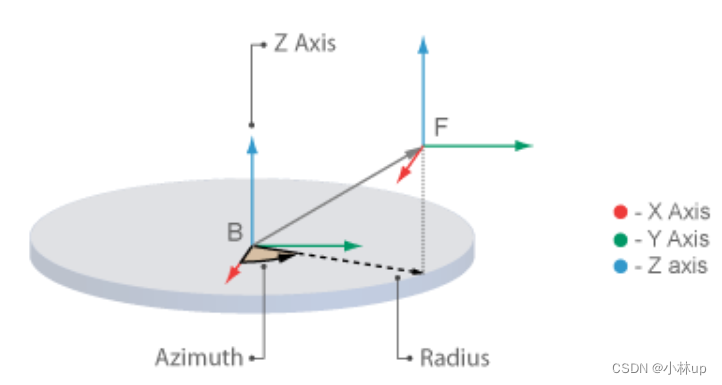
柱坐标系

-
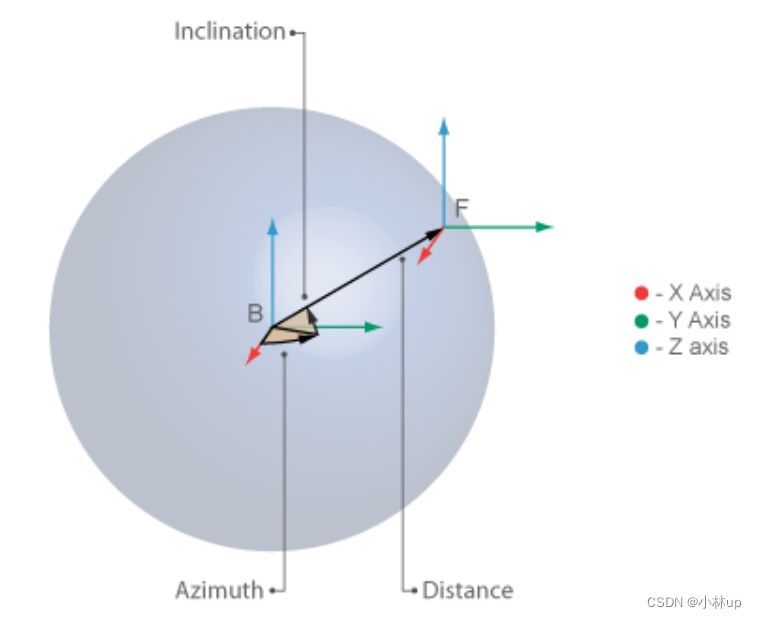
球坐标系

3.2 力传感模块
-
各种joint:建立joint(关节) base和follower之间的力传感。你可以传感运动副自带的力学量。
-
各种constraint:建立constraint(约束)base和follower之间的力传感。
-
External Force and Torque:某些力和力矩模块提供这种类型的传感,如弹簧和阻尼力以及平方反比力。
你可以查看这些模块:
- inverse Square Law Force
- Spring and Damper Force
- Scope
- Transform Sensor
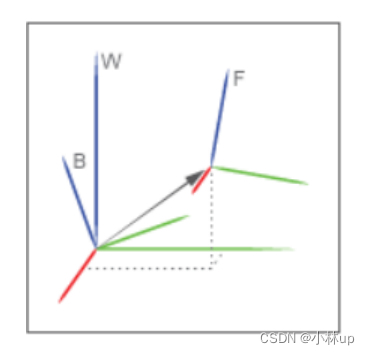
3.2.1 关节力和力矩细分

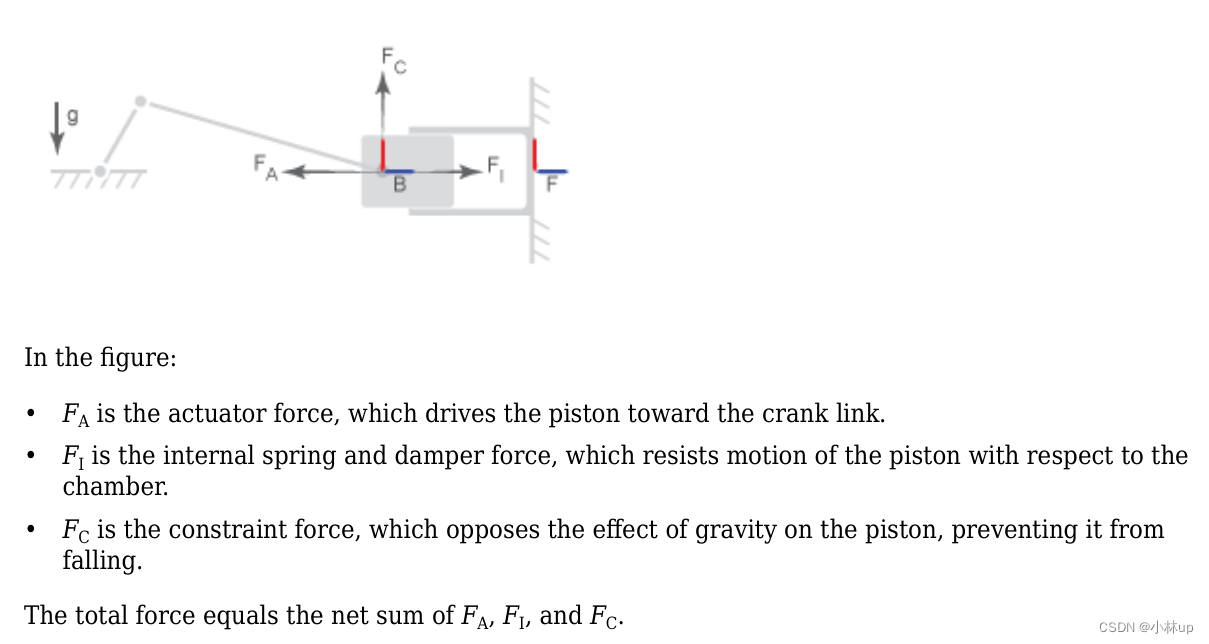
举了个例子:
FA:驱动力,沿着运动方向
Fl:内弹簧力和阻尼力,阻碍运动
Fc:约束反力
所有的力等于FA、Fl和Fc的总和。
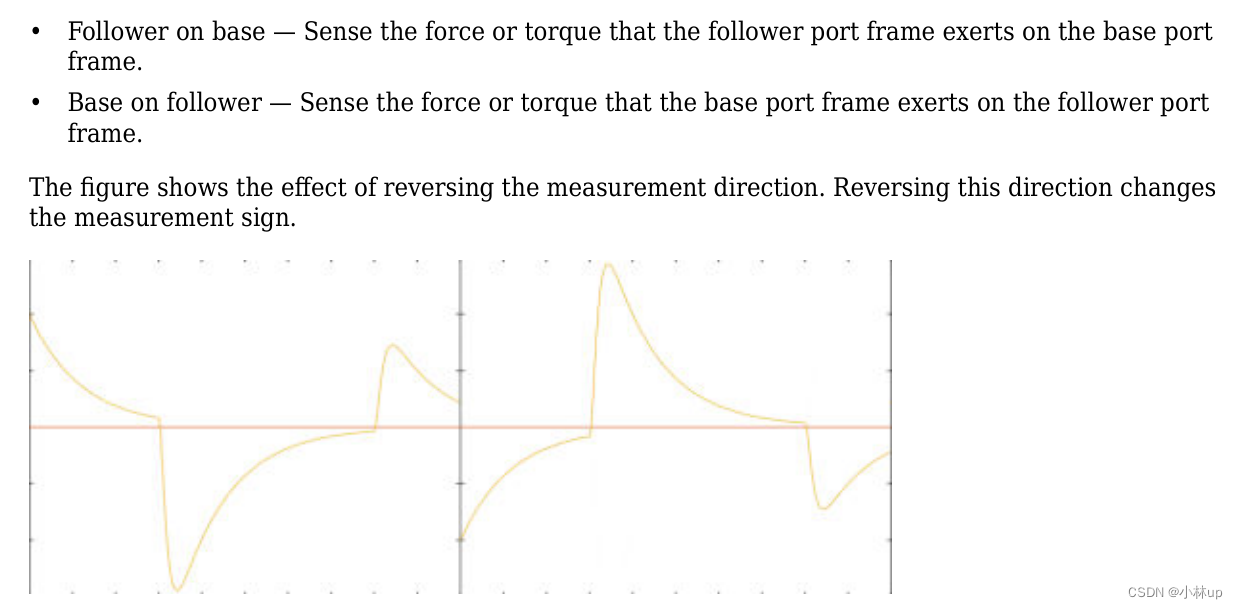
牛顿第三定律有作用力和反作用力,可以定义关节力是从base传到follower或是从follower传到base。
参考
《Simscape User Guide》 3-31 ~ 3-35, 3-56 ~ 3-67