编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍⭐️✍
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是助手君。
本次使用的机械臂来自我们的朋友@大象机器人,测试模拟工厂在OAK相机出厂前的校准工作。大家如果没有机械臂,也可以手动校准(教程),效果差别不会特别大。本次校准使用的OAK相机是OAK-D-Lite,其他型号的双目OAK相机也可参考此教程校准。
myCobot 280机械臂校准OAK-D-Lite智能深度相机
▌机械臂环境
- arduino mega 2560 *1
- USB串口调试器 *1
参考文档烧写机械臂的驱动、设置arduino开发环境、以及设备的连接,ATOM驱动烧写4.1版本。
▌设备连接
机械臂与arduino的连接参考上一步的文档。
USB串口调试器是用来触发每一张图片的动作,需要rx和tx交叉接,接到rx0和tx0上,还有一个GND也要接。
OAK连接到电脑,固定到机械臂末端。
▌arduino烧写
烧写时检查rx0和tx0不要被占用(即烧写时不要接USB串口调试器),烧写以下代码:
#include <MyCobotBasic.h>
#include <ParameterList.h>
#include <SoftwareSerial.h>
MyCobotBasic myCobot;
void setup()
{
Serial.begin(4800);
myCobot.setup();
delay(100);
myCobot.powerOn();
delay(100);
}
void loop()
{
if (Serial.available()) {
int read1;
read1 = Serial.read();
// Serial.println("read1");
// Serial.println(read1);
if (read1 == 1){
myCobot.writeAngle(1, 17.40, 50);
delay(1000);
myCobot.writeAngle(2, -121.64, 50);
delay(1000);
myCobot.writeAngle(3, 42.27, 50);
delay(1000);
myCobot.writeAngle(4, 73.21, 50);
delay(1000);
myCobot.writeAngle(5, -11.51, 50);
delay(1000);
myCobot.writeAngle(6, 21.79, 50);
delay(4000);
Serial.write(1);
} else if (read1 == 2){
//2
myCobot.writeAngle(1, 43.41, 50);
delay(1000);
myCobot.writeAngle(2, -118.03, 50);
delay(1000);
myCobot.writeAngle(3, 44.73, 50);
delay(1000);
myCobot.writeAngle(4, 58.62, 50);
delay(1000);
myCobot.writeAngle(5, -60.20, 50);
delay(1000);
myCobot.writeAngle(6, 32.08, 50);
delay(4000);
Serial.write(2);
} else if (read1 == 3){
//3
myCobot.writeAngle(1, 43.24, 50);
delay(1000);
myCobot.writeAngle(2, -121.81, 50);
delay(1000);
myCobot.writeAngle(3, 45.08, 50);
delay(1000);
myCobot.writeAngle(4, 63.89, 50);
delay(1000);
myCobot.writeAngle(5, -55.98, 50);
delay(1000);
myCobot.writeAngle(6, 31.72, 50);
delay(4000);
Serial.write(3);
} else if (read1 == 4){
//4
myCobot.writeAngle(1, 47.02, 50);
delay(1000);
myCobot.writeAngle(2, -116.36, 50);
delay(1000);
myCobot.writeAngle(3, 45.61, 50);
delay(1000);
myCobot.writeAngle(4, 58.09, 50);
delay(1000);
myCobot.writeAngle(5, -52.29, 50);
delay(1000);
myCobot.writeAngle(6, 31.81, 50);
delay(4000);
Serial.write(4);
} else if (read1 == 5){
//5
myCobot.writeAngle(1, -15.55, 50);
delay(1000);
myCobot.writeAngle(2, -121.28, 50);
delay(1000);
myCobot.writeAngle(3, 74.35, 50);
delay(1000);
myCobot.writeAngle(4, 28.56, 50);
delay(1000);
myCobot.writeAngle(5, 35.59, 50);
delay(1000);
myCobot.writeAngle(6, 8.70, 50);
delay(4000);
Serial.write(5);
} else if (read1 == 6){
//6
myCobot.writeAngle(1, -17.22, 50);
delay(1000);
myCobot.writeAngle(2, -114.08, 50);
delay(1000);
myCobot.writeAngle(3, 49.83, 50);
delay(1000);
myCobot.writeAngle(4, 54.84, 50);
delay(1000);
myCobot.writeAngle(5, 32.69, 50);
delay(1000);
myCobot.writeAngle(6, 12.65, 50);
delay(4000);
Serial.write(6);
} else if (read1 == 7){
//7
myCobot.writeAngle(1, -14.32, 50);
delay(1000);
myCobot.writeAngle(2, -105.90, 50);
delay(1000);
myCobot.writeAngle(3, 31.90, 50);
delay(1000);
myCobot.writeAngle(4, 64.51, 50);
delay(1000);
myCobot.writeAngle(5, 25.31, 50);
delay(1000);
myCobot.writeAngle(6, 12.65, 50);
delay(4000);
Serial.write(7);
} else if (read1 == 8){
//8
myCobot.writeAngle(1, 2.10, 50);
delay(1000);
myCobot.writeAngle(2, -47.19, 50);
delay(1000);
myCobot.writeAngle(3, 33.39, 50);
delay(1000);
myCobot.writeAngle(4, -22.23, 50);
delay(1000);
myCobot.writeAngle(5, 4.83, 50);
delay(1000);
myCobot.writeAngle(6, 17.84, 50);
delay(4000);
Serial.write(8);
} else if (read1 == 9){
//9
myCobot.writeAngle(1, 0.61, 50);
delay(1000);
myCobot.writeAngle(2, -47.81, 50);
delay(1000);
myCobot.writeAngle(3, 32.95, 50);
delay(1000);
myCobot.writeAngle(4, -19.51, 50);
delay(1000);
myCobot.writeAngle(5, 2.72, 50);
delay(1000);
myCobot.writeAngle(6, 15.11, 50);
delay(4000);
Serial.write(9);
} else if (read1 == 10){
// A
myCobot.writeAngle(1, 9.84, 50);
delay(1000);
myCobot.writeAngle(2, -69.87, 50);
delay(1000);
myCobot.writeAngle(3, 33.31, 50);
delay(1000);
myCobot.writeAngle(4, 11.16, 50);
delay(1000);
myCobot.writeAngle(5, -5.0, 50);
delay(1000);
myCobot.writeAngle(6, 22.58, 50);
delay(4000);
Serial.write(10);
} else if (read1 == 11){
// B
myCobot.writeAngle(1, 3.51, 50);
delay(1000);
myCobot.writeAngle(2, -140.36, 50);
delay(1000);
myCobot.writeAngle(3, 33.66, 50);
delay(1000);
myCobot.writeAngle(4, 113.64, 50);
delay(1000);
myCobot.writeAngle(5, 2.37, 50);
delay(1000);
myCobot.writeAngle(6, 18.45, 50);
delay(4000);
Serial.write(11);
} else if (read1 == 12){
// C
myCobot.writeAngle(1, 4.04, 50);
delay(1000);
myCobot.writeAngle(2, -140.18, 50);
delay(1000);
myCobot.writeAngle(3, 33.31, 50);
delay(1000);
myCobot.writeAngle(4, 116.45, 50);
delay(1000);
myCobot.writeAngle(5, 2.37, 50);
delay(1000);
myCobot.writeAngle(6, 17.40, 50);
delay(4000);
Serial.write(12);
} else if (read1 == 13){
// D
myCobot.writeAngle(1, 3.51, 50);
delay(1000);
myCobot.writeAngle(2, -140.27, 50);
delay(1000);
myCobot.writeAngle(3, 33.31, 50);
delay(1000);
myCobot.writeAngle(4, 107.31, 50);
delay(1000);
myCobot.writeAngle(5, 2.37, 50);
delay(1000);
myCobot.writeAngle(6, 14.50, 50);
delay(4000);
Serial.write(13);
} else if (read1 == 14){
// E
myCobot.setFreeMove();
} else if (read1 == 15){
// F
Angles angles = myCobot.getAngles();
delay(200);
for (int i = 0; i < 6; i++) {
Serial.println(angles[i]);
}
}
}
}
▌启动OAK
https://github.com/Marco-ardu/depthai/tree/lite_calibration
定格角度commit: e6a0c9f43e2e18f2c31d70a1cb248a867d3e5ede
自动校准commit: 52f8e08887738ce8ab348a586cacc64bec0881dd
依赖(建议创建虚拟环境安装)
python -m pip install -r requirements.txt
启动
python calibrate.py -s 2 -brd oak-d-lite -db -rd
▌找定格角度
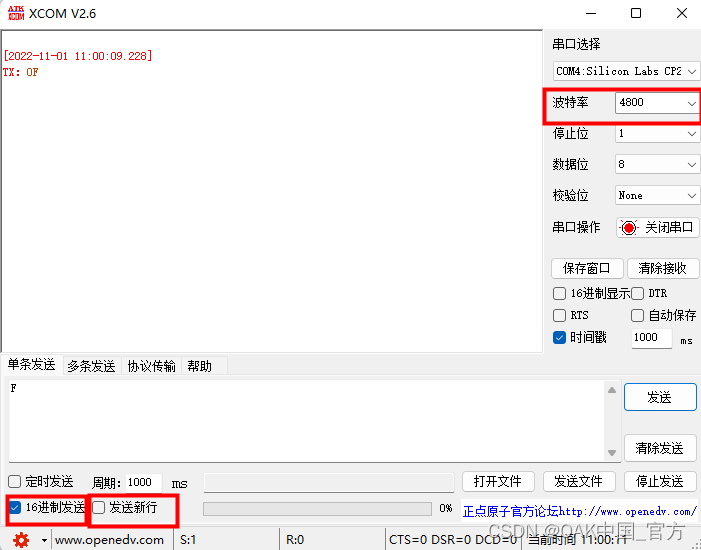
XCOM V2.6.exe下载
启动OAK相机之后,可以看到三个相机的画面,以及画面上黑色的框,先调整棋盘格到机械臂的距离,能够保证棋盘格在三个画面里就可以了,不能太远,大概距离是50cm-60cm,具体根据真实环境调整。
确认USB串口调试器已经连接好
打开XCOM软件,配置如下,波特率根据上面的arduino代码设置的填写

串口输出E让机械臂自由移动,然后移动机械臂将棋盘格移动到框内(在大致大概即可),然后串口输出F,获取定格角度;点击相机画面,然后键盘输入空格,进入下一张,如果失败,说明当前位置不正确,重新调整位置,一共13张。
▌自动校准
在获得13张图片的定格角度之后,填写到上面的arduino代码中,重新烧写代码。
OAK关闭后,切换到自动校准的commit。
启动相机,点击相机画面,键盘输入s,即可开始自动校准。
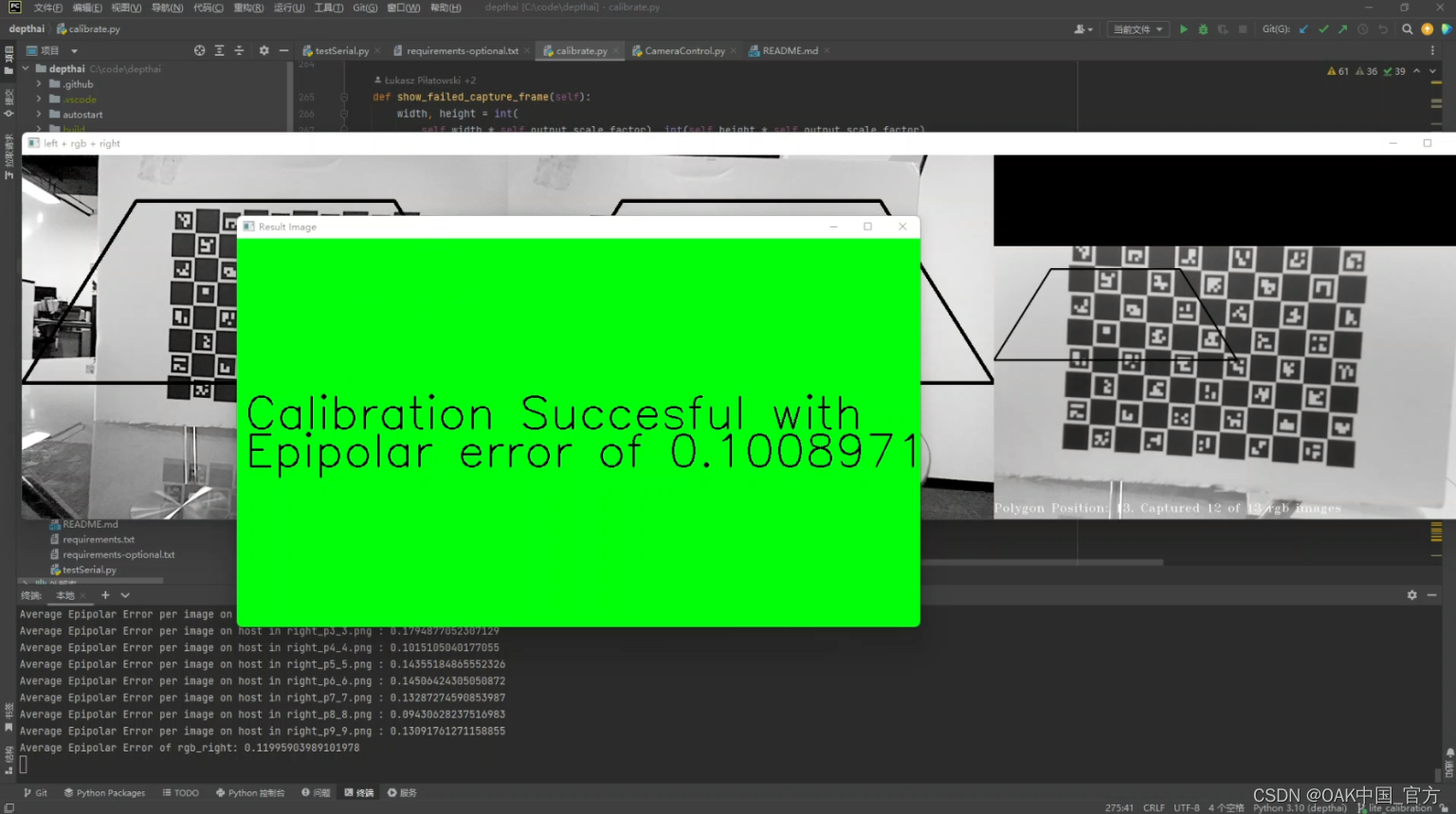
▌结果
出现以下图像即表示校准成功!
大部分的测试校准都能成功,但偶尔会出现以下错误。
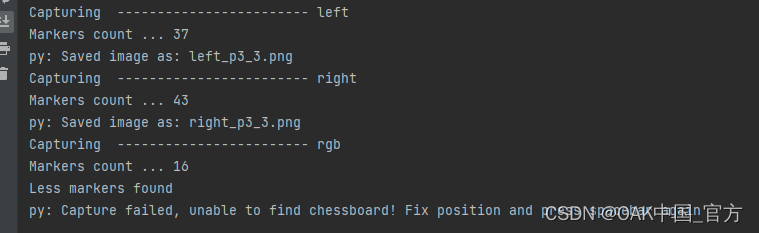
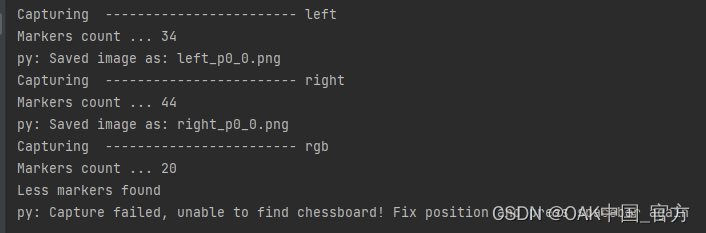
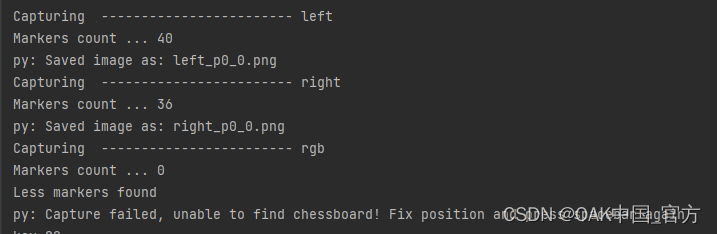
校准会出现以上错误,网上查了校准的原理,这个错误原因是rgb画面在检测的那一帧模糊导致检测的角点过少,无法构建对应的方程去解出校准参数。
▌参考资料
https://docs.oakchina.cn/en/latest/
https://www.oakchina.cn/selection-guide/
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗






![[python]用flask框架搭建微信公众号的后台](https://img-blog.csdnimg.cn/img_convert/289d636f3093f6ec016e236813dac551.png)