强化学习数学方法:蒙特卡洛方法
- 举个例子
- 举个例子1:投掷硬币
- The simplest MC-based RL algorithm
- 举个例子2:Episode length
- Use data more efficiently
- MC without exploring starts
- 总结
- 内容来源
将value iteration和policy iteration方法称为model-based reinforcement learning方法,这里的Monte Carlo方法称为model-free的方法。
举个例子
如何在没有模型的情况下估计某些事情?最简单的想法就是Monte Carlo estimation。
举个例子1:投掷硬币

目标是计算
E
[
X
]
\mathbb{E}[X]
E[X]。有两种方法:
Method 1: Model-based
这个方法虽然简单,但是问题是它不太可能知道precise distribution。
Method 2: Model-free
该方法的思想是将硬币投掷很多次,然后计算结果的平均数。
问题:Monte Carlo估计是精确的吗?
- 当N是非常小的时候,估计是不精确的
- 随着N的增大,估计变得越来越精确
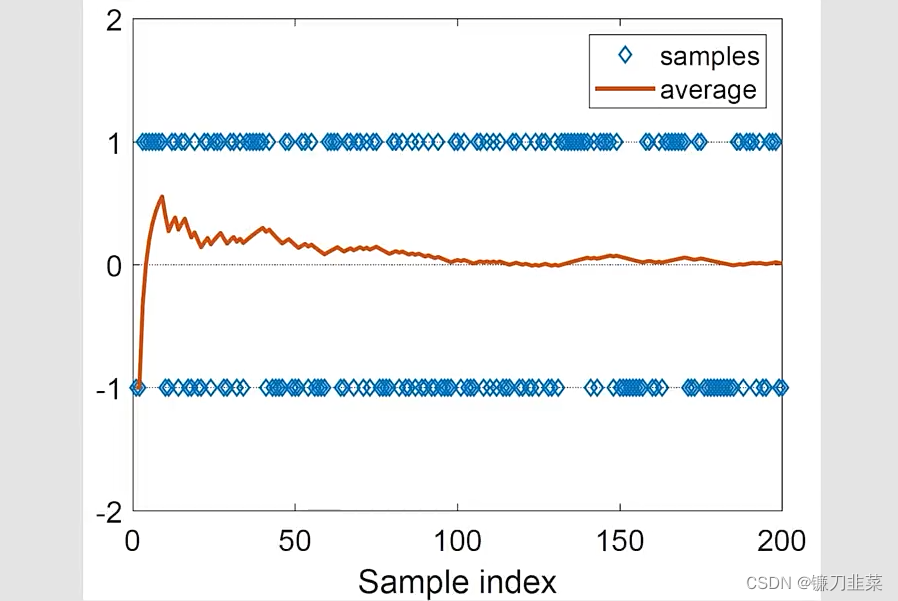
大数定理(Law of Large Numbers):

注意:样本必须是独立同分布的(iid, independent and identically distributed)
小结一下:
- Monte Carlo estimation refers to a broad class of techniques that rely on repeated random sampling to solve appriximation problems.
- Why we care about Monte Carlo estimation? Because it does not require the model!
- Why we care about mean estimation? Because state value and action value are defined as expectations of random variables!
The simplest MC-based RL algorithm
Algorithm: MC Basic
理解该算法的关键是理解how to convert the policy iteration algorithm to be model-free
Convert policy iteration to be model-free
首先,策略迭代算法在每次迭代中分为两步:

其中policy improvement step的elementwise form如下:

这里的关键是
q
π
k
(
s
,
a
)
q_{\pi_k}(s, a)
qπk(s,a)!计算
q
π
k
(
s
,
a
)
q_{\pi_k}(s, a)
qπk(s,a)有两种算法:
Expression 1 requires the model:

Expression 2 does not require the model:

上面的式子针对实现model-free的RL的启发是:可以使用式子2,根据数据(samples或者experiences)去计算
q
π
k
(
s
,
a
)
q_{\pi_k}(s, a)
qπk(s,a)。那具体是怎么做的呢?
The procedure of Monte Carlo estimation of action values:
- 首先,从一个组合 ( s , a ) (s,a) (s,a)出发,按照一个策略 π k \pi_k πk,生成一个episode;
- 计算这个episode,return是 g ( s , a ) g(s, a) g(s,a)
- g ( s , a ) g(s,a) g(s,a)是在下式中 G t G_t Gt的一个采样: q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] q_{\pi_k}(s,a)=\mathbb{E}[G_t|S_t=s, A_t=a] qπk(s,a)=E[Gt∣St=s,At=a]
- 假设我们有一组episodes和hence { g ( j ) ( s , a ) } \{g^{(j)}(s,a)\} {g(j)(s,a)},那么 q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] ≈ 1 N ∑ i = 1 N g ( i ) ( s , a ) q_{\pi_k}(s,a)=\mathbb{E}[G_t|S_t=s, A_t=a]\approx \frac{1}{N}\sum_{i=1}^Ng^{(i)}(s, a) qπk(s,a)=E[Gt∣St=s,At=a]≈N1i=1∑Ng(i)(s,a)
所以,总的来说,一句话就是当我们没有模型的时候,我们要有数据,反正总得有一个。
到此时,算法也逐渐清晰,这个算法的名称是MC-Basic算法。下面描述这个算法:
给定一个初始策略
π
0
\pi_0
π0,在第k次迭代有两个步骤:
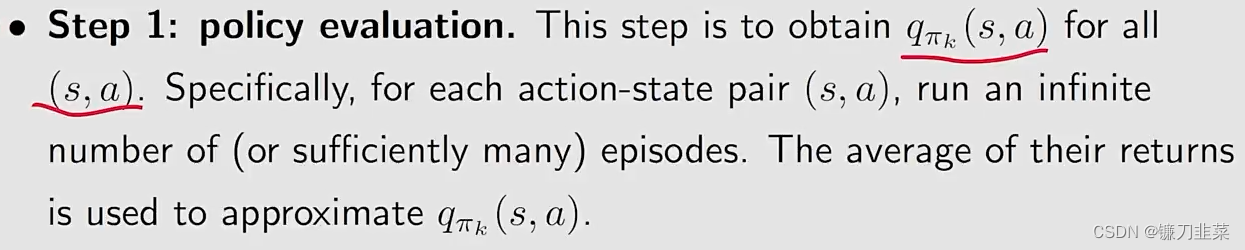
- Step 1:
policy evaluation
- Step 2:
policy improvemtn

第二步和policy iteration algorithm基本上是一致的,除了上式是直接估计 q π k ( s , a ) q_{\pi_k}(s,a) qπk(s,a),而不是求解 v π k ( s ) v_{\pi_k}(s) vπk(s)。
MC Basic algorithm(a model-free variant of policy iteration)的伪代码:
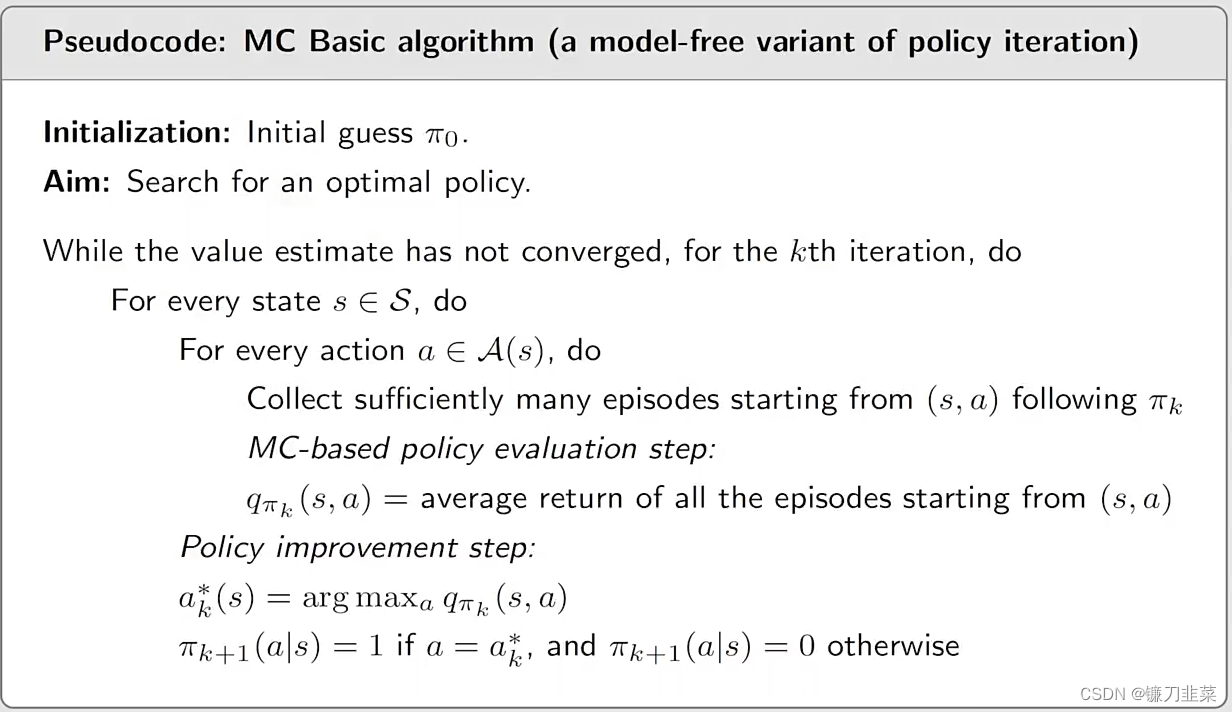
需要注意的是:
- MC Basic算法是policy iteration algorithm的一个变体。
- The model-free algorithms are built up based on model-based ones. 也就是说,在研究model-free算法之前,需要先了解对应的model-based算法。
- MC Basic是非常有用的,它可以揭示MC-based model-free RL的核心思想,但是它并不实用,因为它的efficiency比较低。
- 为什么MC Basic算法估计action values而不是state values?因为state values不能被用来直接改善policies。当模型不可用的时候,应该直接估计action values。
- 由于policy iteration是收敛的,那么很自然地,MC Basic的收敛性也保证了给定足够多的episodes后,它也是收敛的。
举个例子:step by step
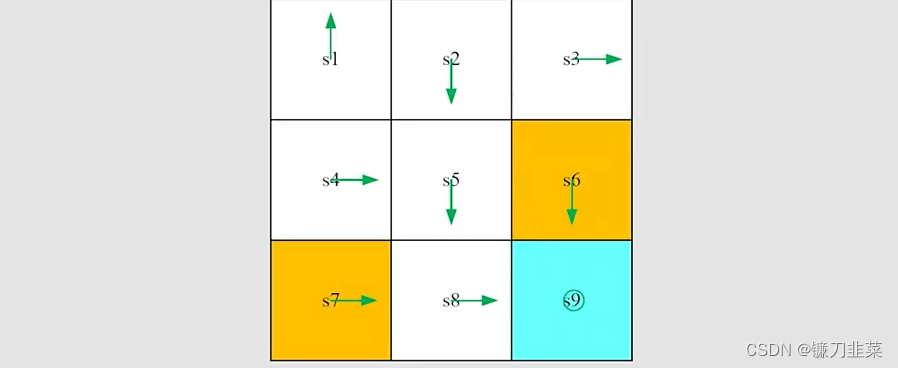
任务是:给定如图所示的一个初始策略,使用MC Basic算法找到一个最优策略,其中
r
b
o
u
n
d
a
r
y
=
−
1
,
r
f
o
r
b
i
d
d
e
n
=
−
1
,
r
t
a
r
g
e
t
=
1
,
γ
=
0.9
r_{boundary=-1}, r_{forbidden}=-1, r_{target}=1, \gamma=0.9
rboundary=−1,rforbidden=−1,rtarget=1,γ=0.9。
MC Basic算法和policy iteration一样,也分为两步。给定当前策略
π
k
\pi_k
πk
- Step 1 ——policy evaluation: 计算 q π k ( s , a ) q_{\pi_k}(s,a) qπk(s,a)。就这里而言,有多少个state-action pairs呢?一共有9 states × 5 actions =45 state-action pairs。
- Step 2 ——policy improvement: 选择greedy action a ∗ ( s ) = a r g max a i q π k ( s , a ) a^*(s)=arg\max_{a_i} q_{\pi_k}(s, a) a∗(s)=argaimaxqπk(s,a)
这里仅仅展示
q
π
k
(
s
1
,
a
)
q_{\pi_k}(s_1,a)
qπk(s1,a):
Step 1-policy evaluation:
- 因为当前策略是确定性的,所以一个episode就可以得到action value!
- 如果当前策略是随机性的,就需要无限个episodes(至少要很多次)。
从
(
s
1
,
a
1
)
(s_1, a_1)
(s1,a1)出发:

从
(
s
1
,
a
2
)
(s_1, a_2)
(s1,a2)出发:

从
(
s
1
,
a
3
)
(s_1, a_3)
(s1,a3)出发:

从
(
s
1
,
a
4
)
(s_1, a_4)
(s1,a4)出发:

从
(
s
1
,
a
5
)
(s_1, a_5)
(s1,a5)出发:

Step 2-policy improvement:
- 通过观察上面的action values,可以看到 q π 0 ( s 1 , a 2 ) = q π 0 ( s 1 , a 3 ) q_{\pi_0}(s_1,a_2)=q_{\pi_0}(s_1,a_3) qπ0(s1,a2)=qπ0(s1,a3)是最大值。
- 因此,策略可以改进为 π 1 ( a 2 ∣ s 1 ) = 1 or π 1 ( a 3 ∣ s 1 ) = 1 \pi_1(a_2|s_1)=1 \text{ or } \pi_1(a_3|s_1)=1 π1(a2∣s1)=1 or π1(a3∣s1)=1
不管怎样,新的策略对于 s 1 s_1 s1是最优的。在这个例子中一次迭代就足够了。
举个例子2:Episode length
检查episode长度的影响:
- 需要采样episodes,但是the length of an episode cannot be infinitely long.
- 应该设置多长的episode?
示例设定:一个5-by-5的网格世界,奖励设定为:
r
b
o
u
n
d
a
r
y
=
−
1
,
r
f
o
r
b
i
d
d
e
n
=
−
1
,
r
t
a
r
g
e
t
=
1
,
γ
=
0.9
r_{boundary=-1}, r_{forbidden}=-1, r_{target}=1, \gamma=0.9
rboundary=−1,rforbidden=−1,rtarget=1,γ=0.9
基于不同的episode长度,使用MC Basic去搜索最优策略:
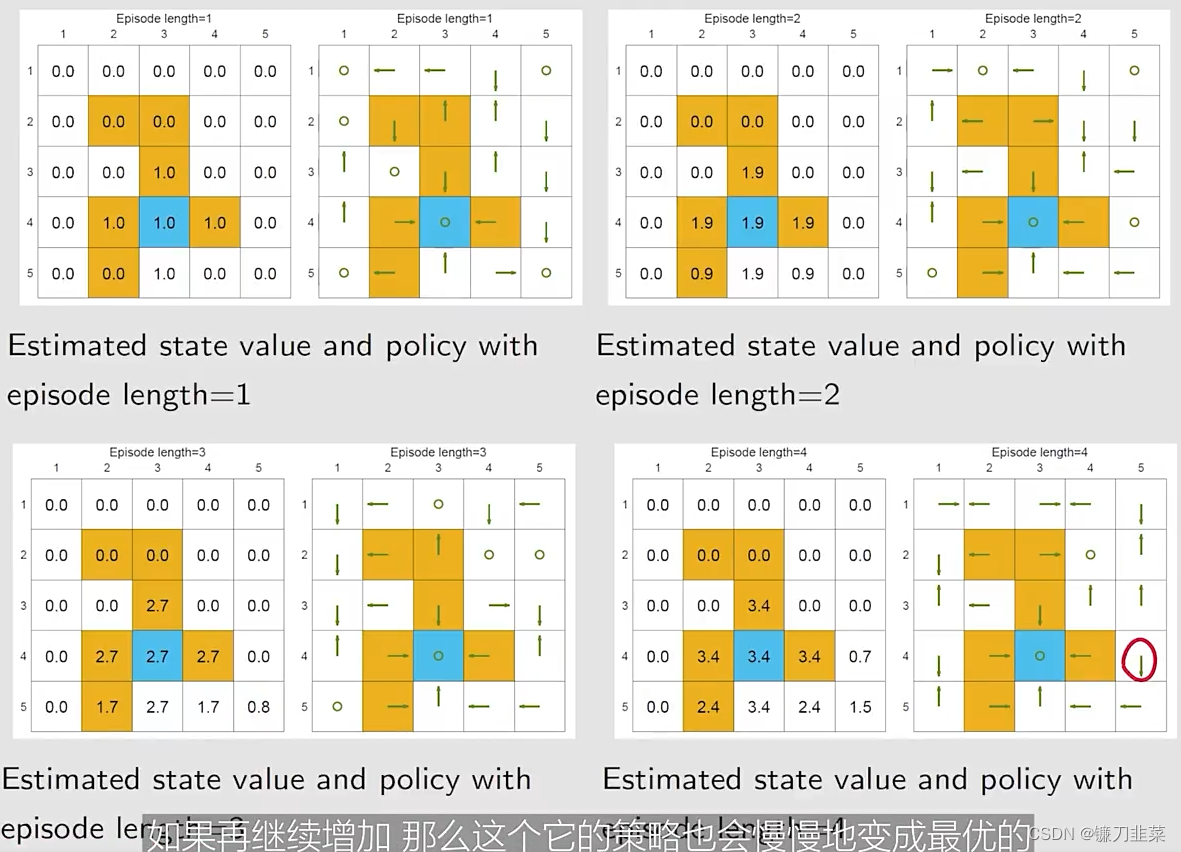
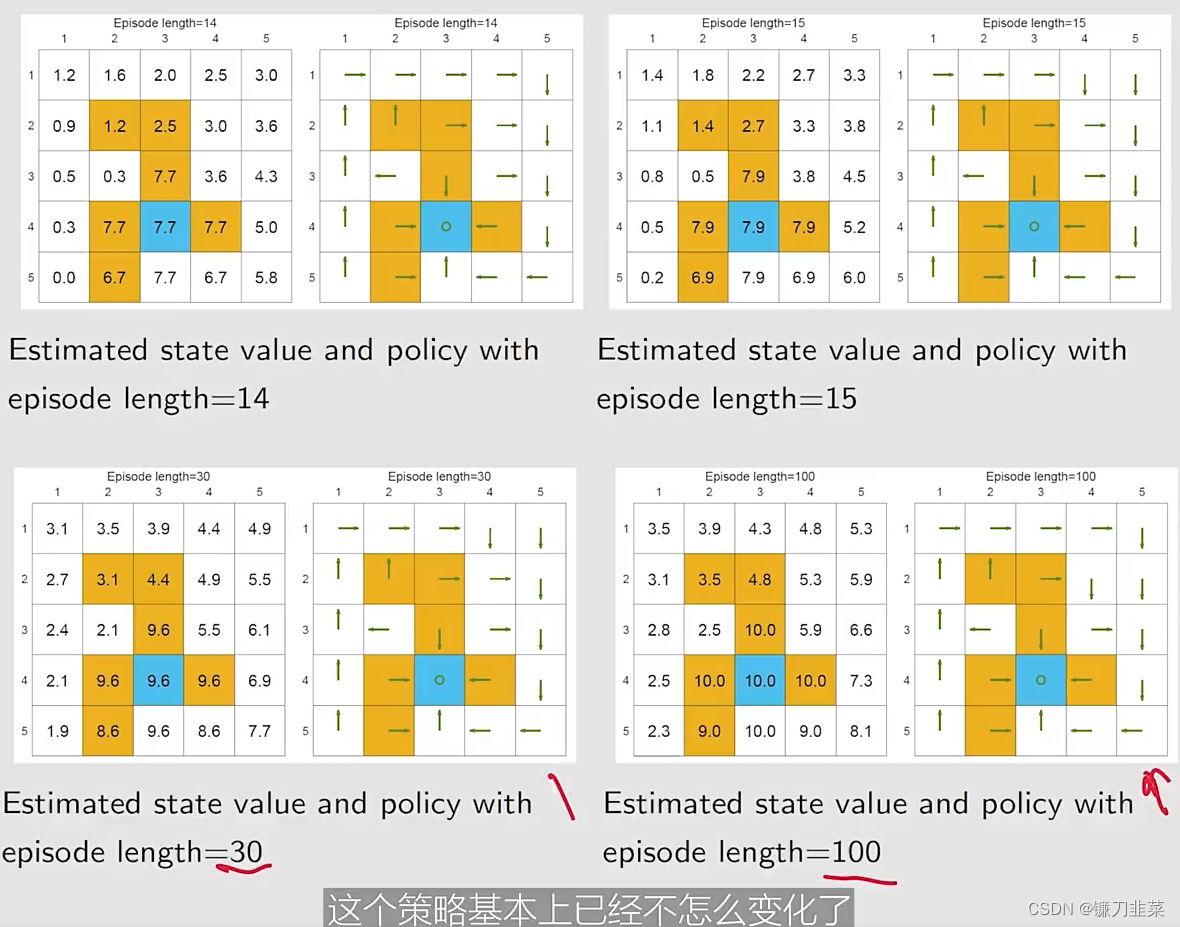
我们的发现:
- 当episode的长度较短的时候,只有离目标较近的状态具有非零的state values。
- 随着episode长度的增加,越靠近target的states更早地变为nonzero values,与那些与target较远的states相比。
- episode length必须要足够长
- episode length也不需要是无限长。
Use data more efficiently
MC Basic算法的优点是清晰地解释了MC方法的核心思想,但是缺点是太简单以至于无法在实际中使用。因此需要将MC Basic算法扩展,使其更加高效。那么如何来做呢?
首先,考虑一个网格世界,根据一个策略
π
\pi
π,得到一个episode,如下:

然后,引入一个概念,Visit:every time a state-action pair appears in the episode, it is called a visit of that state-action pair.
在MC Basic算法中用的一个策略是:Initial-visit method。
- 仅仅计算the return和估计 q π ( s 1 , a 2 ) q_{\pi}(s_1, a_2) qπ(s1,a2)
- 这也是MC Basic算法的做法
- 缺点是:不能完全利用数据
充分利用数据:The episode also visits other state-action pairs.
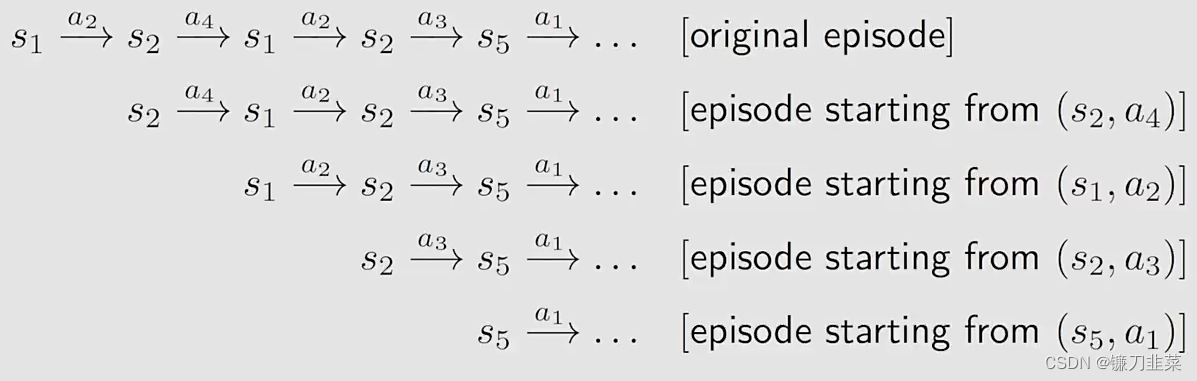
可以估计
q
π
(
s
1
,
a
2
)
q_{\pi}(s_1, a_2)
qπ(s1,a2),
q
π
(
s
2
,
a
4
)
q_{\pi}(s_2, a_4)
qπ(s2,a4),
q
π
(
s
2
,
a
3
)
q_{\pi}(s_2, a_3)
qπ(s2,a3),
q
π
(
s
5
,
a
1
)
q_{\pi}(s_5, a_1)
qπ(s5,a1)…
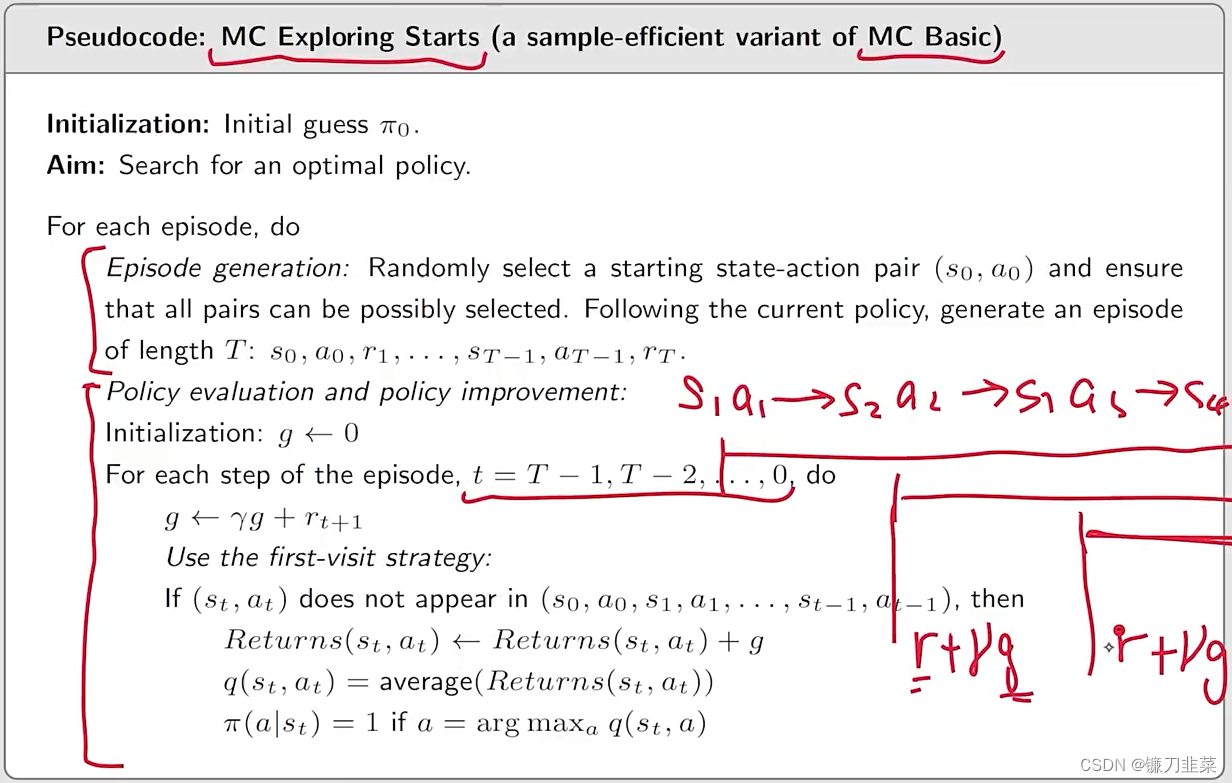
Data-efficient methods:
- first-visit method
- every-visit method
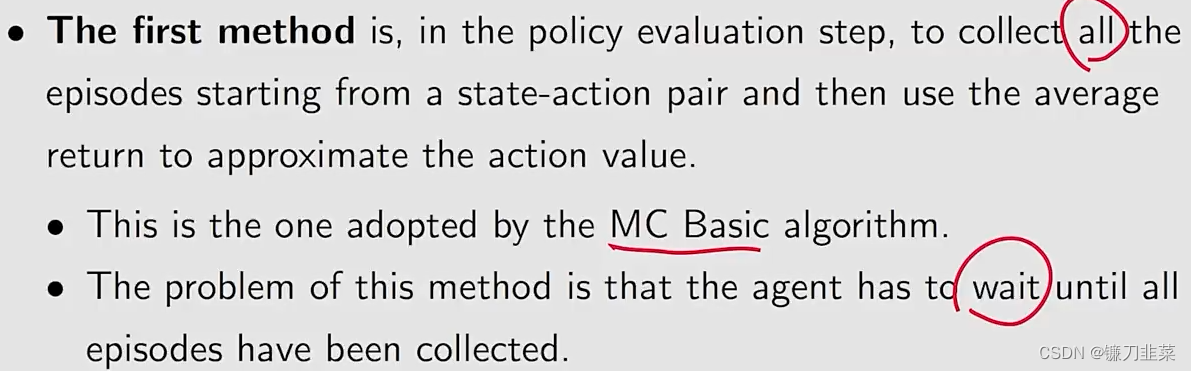
除了怎么样让数据的利用更加高效之外,Another aspect in MC-based RL is when to update the policy。 这里有两个方法:
- 第一种方法:
- 第二种方法:

那么问题来了,第二种方法会造成一些问题吗?
- 有人会认为一个episode的return不能准确估计相应的action value
- 事实上,we have done that in the truncated policy iteration algorithm,因此,就算不精确,也没有关系.
上述方法的名称是Generalized policy iteration, 简称为GPI:
- 它不是一个特定的具体的算法
- 它表示the general idea or framework of switching between policy-evaluation and policy-improvement processes.
- 许多model-based和model-free RL算法都能fall into this framework。
有了上面的过程,我们可以得到一个新的算法:Algorithm: MC Exploring Starts,即更加高效的使用数据和更新估计。
那么,为什么需要考虑exploring starts?
- 理论上,only if every action value for every state is well explored, can we select the optimal actions correctly. 相反,如果有一个action没有被explored, 那么可能会把这个action漏掉,而它刚好有可能是最优的。
- 实际上,exploring starts是非常难以实现的。对于许多应用,尤其是涉及和环境交互的物理场景中,难以从每一个state-action pair中收集episodes starting。
因此,在理论和实际中存在一个gap。那么能否将exploring starts这个条件去掉,或者转化掉,用其他的形式实现呢?答案是可以的,需要用到soft policies。
MC without exploring starts
什么是Soft policies?如果一个策略采取的每一个action的概率是positive,也就是这些action都有可能被采取,那么这个策略就称为soft。
那么为什么要引入soft policies呢?
- 基于soft policy,a few episodes that are sufficiently long can visit every state-action pair for sufficiently many times.
- Then,我们不需要从every state-action pair得到大量的episodes。因此,上一节中的exploring starts就可以被removed.
那么我们使用什么样的soft policies呢?答案是
ϵ
\epsilon
ϵ-greedy policies
什么是
ϵ
\epsilon
ϵ-greedy policy?
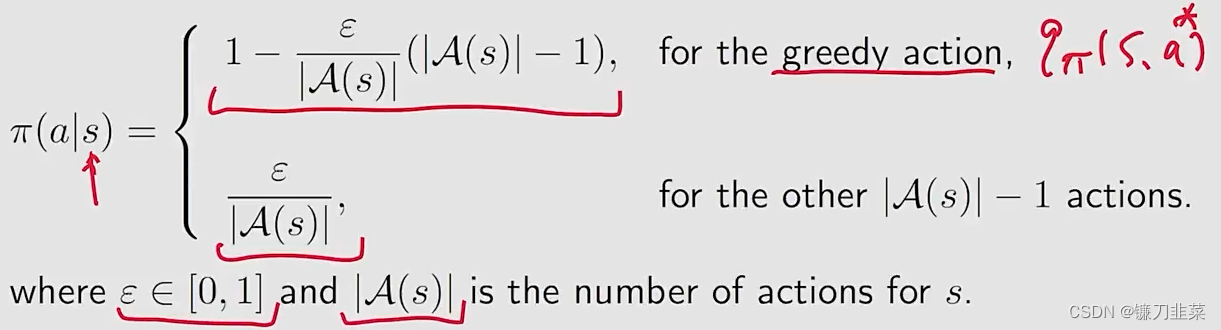
这里有一个性质,就是选择这个greedy action的概率始终比其他的任何一个action的概率都要大。

为什么要使用
ϵ
\epsilon
ϵ-greedy?因为它能够平衡exploitation(充分利用现有的)和exploration(探索未知的)。
- 当 ϵ = 0 \epsilon = 0 ϵ=0,它变为了greedy!与exploitation相比,exploration就会弱一些!
- 当 ϵ = 1 \epsilon = 1 ϵ=1,它变为了一个均匀分布,exploration更强,exploitation更弱。
那么如何将
ϵ
\epsilon
ϵ-greedy整合到MC-based RL算法中呢?
之前在MC Basic和MC Exploring Starts中policy improvement step是求解:

其中的
Π
\Pi
Π表示所有可能的选择的集合。求解出来的最优的策略是:
π
k
+
1
(
a
∣
s
)
=
{
1
a
=
a
k
∗
0
a
≠
a
k
∗
\pi_{k+1}(a|s)=\begin{cases}1 & a = a^*_k \\0 & a\ne a^*_k\end{cases}
πk+1(a∣s)={10a=ak∗a=ak∗其中
a
k
∗
=
arg
max
a
q
π
k
(
s
,
a
)
a^*_k=\text{arg}\max_aq_{\pi_k}(s,a)
ak∗=argmaxaqπk(s,a)
现在,the policy improvement step变为求解:

其中
Π
ϵ
\Pi_\epsilon
Πϵ表示在一个固定的
ϵ
\epsilon
ϵ值条件下的所有
ϵ
\epsilon
ϵ-greedy policies的集合。这时得到的最优策略是

实际上,这里就得到了MC
ϵ
\epsilon
ϵ-greedy算法,与MC Exploring Starts算法相同,除了MC
ϵ
\epsilon
ϵ-greedy算法使用
ϵ
\epsilon
ϵ-greedy策略。因为使用这样一个策略,就不需要exploring starts这样的条件了,但是仍然要求visit all state-action pairs in a different form。
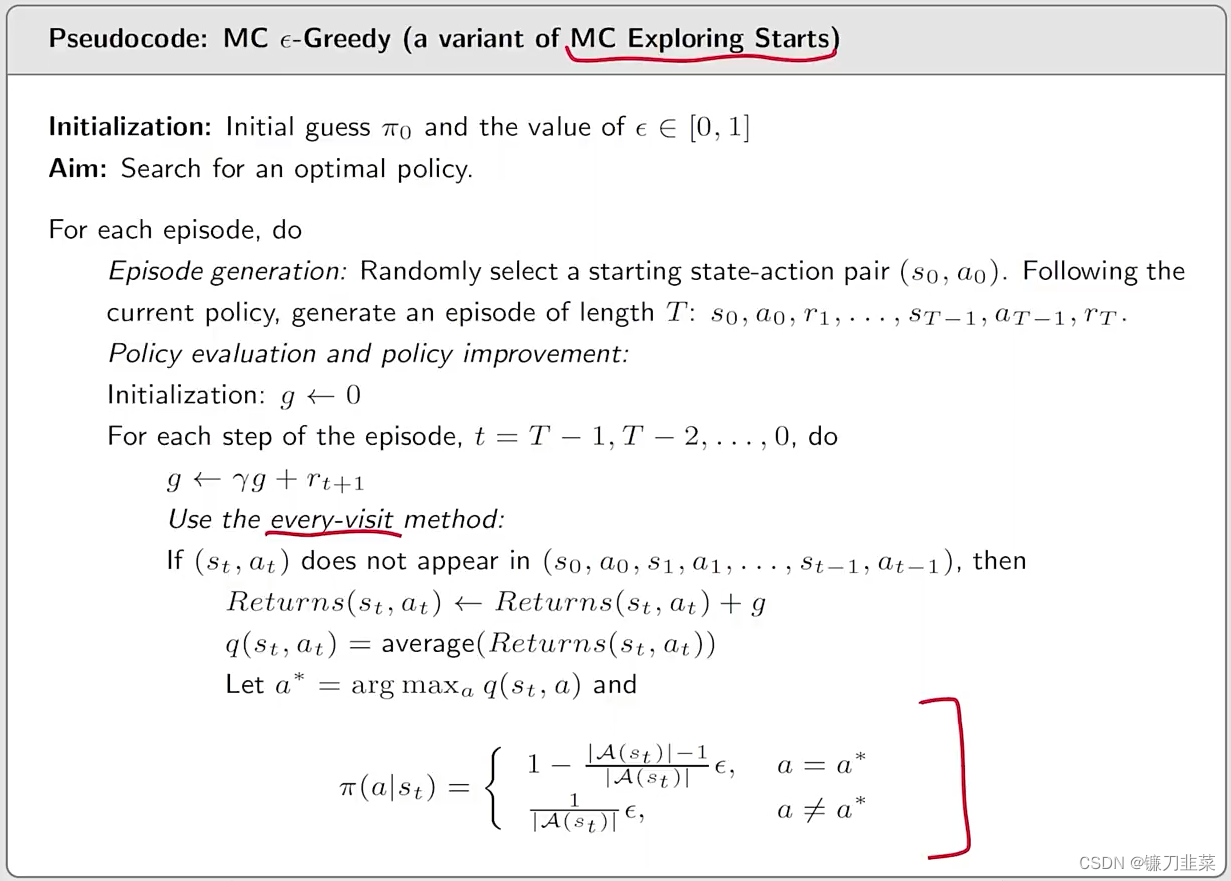
Algorithm: MC
ϵ
\epsilon
ϵ-Greedy的伪代码
现在,我们分析该算法的探索能力,一个单独的episode可以visit所有的state-action pairs吗?
当
ϵ
=
1
\epsilon = 1
ϵ=1,the policy(均匀分布)具有最强的探索能力。
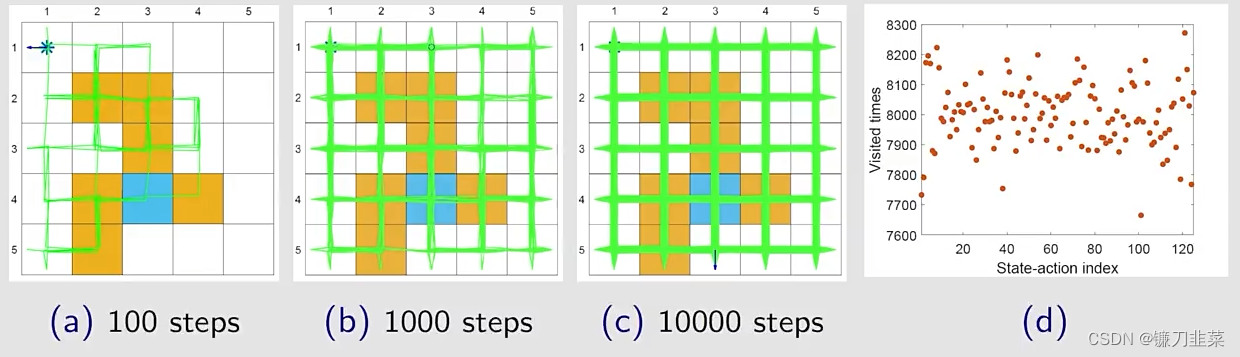
随着步数的增加,网格中几乎所有的位置都探索到了(绿色线),每个state-action被访问的次数也比较高。
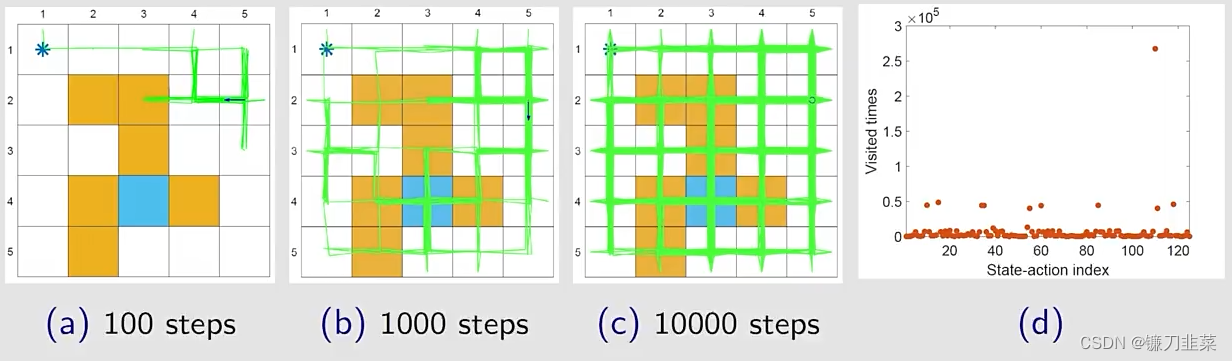
当
ϵ
\epsilon
ϵ比较小的时候,策略的探索能力也会弱一些。
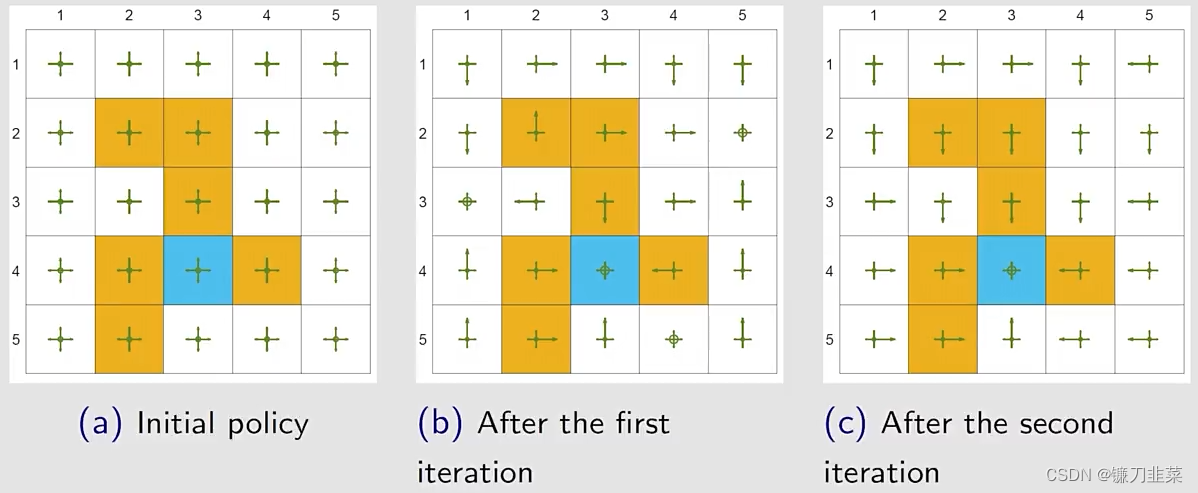
举个例子:利用
ϵ
\epsilon
ϵ-greedy结合蒙特卡洛算法,看一下这个算法能够带来什么样的最优策略。
在每一个iteration中:
- 在episode generation step,用当前的 ϵ \epsilon ϵ-greedy策略生成一个episode,这个episode非常长,只有100万步。
- 然后,用这一个episode去更新剩下所有的state-action pair和policy
- 这个算法避开了exploring starts这样一个条件,只要episode足够长,即使它从一个state-action pair出发,它仍然能够访问所有的其他的state-action pair。
这里
r
b
o
u
n
d
a
r
y
=
−
1
,
r
f
o
r
b
i
d
d
e
n
=
−
10
,
r
t
a
r
g
e
t
=
1
,
γ
=
0.9
r_{boundary=-1}, r_{forbidden}=-10, r_{target}=1, \gamma=0.9
rboundary=−1,rforbidden=−10,rtarget=1,γ=0.9,两次迭代就得到了一个optimal
ϵ
\epsilon
ϵ-greedy policy。所以
ϵ
\epsilon
ϵ-greedy通过探索性得到了一些好处,但是牺牲的是它的最优性。实际使用中,设置一个比较小的
ϵ
\epsilon
ϵ值,当它趋向于0的时候,
ϵ
\epsilon
ϵ-greedy接近于greedy,所以此时找到的最优的greedy的策略也就接近最优的greedy的策略。实际当中也可以让这个
ϵ
\epsilon
ϵ逐渐减小。
接下来,通过例子证明这个过程,设定为
r
b
o
u
n
d
a
r
y
=
−
1
,
r
f
o
r
b
i
d
d
e
n
=
−
10
,
r
t
a
r
g
e
t
=
1
,
γ
=
0.9
r_{boundary=-1}, r_{forbidden}=-10, r_{target}=1, \gamma=0.9
rboundary=−1,rforbidden=−10,rtarget=1,γ=0.9。
最优性(Optimality):
给定一个
ϵ
\epsilon
ϵ-greedy policy,它的state value是什么?
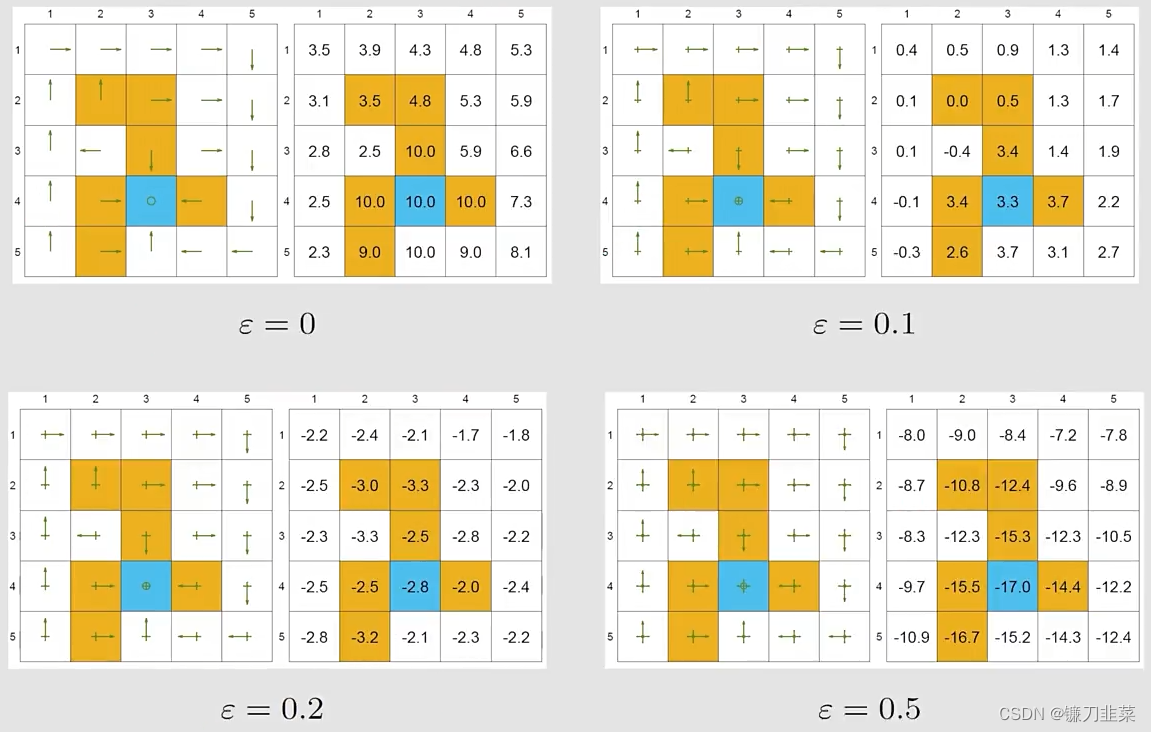
最优的策略就是有最大的state value的策略。当
ϵ
\epsilon
ϵ增加的时候,the optimality of the policy becomes worse! 为什么目标state的state value变为了negative?因为它在这个地方有比较大的概率进入到forbidden area,得到负数的reward会非常多。
一致性(Consistency):
找到最优的
ϵ
\epsilon
ϵ-greedy policies和它们的state values?直接给出一个最优策略,用MC
ϵ
\epsilon
ϵ-greedy 算法,设置
ϵ
\epsilon
ϵ为0.1。一致性也就是当
ϵ
\epsilon
ϵ-greedy得到的策略与greedy得到的策略是一致的。
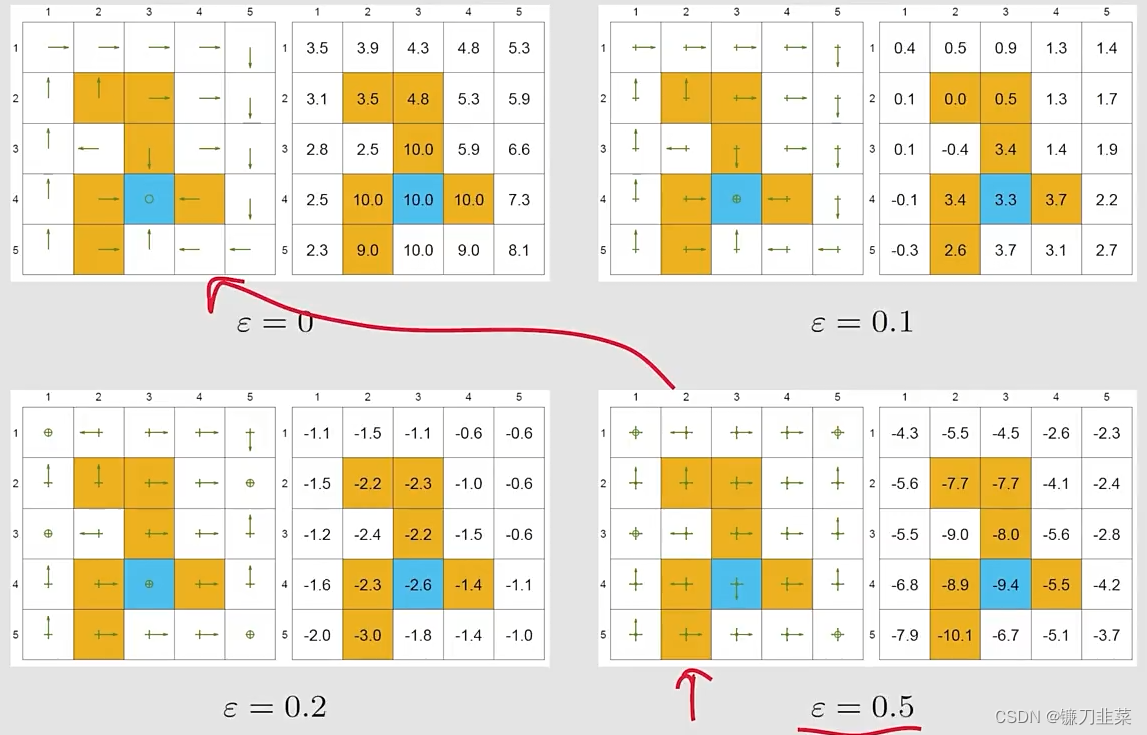
结论是如果想用 MC
ϵ
\epsilon
ϵ-greedy的时候,
ϵ
\epsilon
ϵ不能太大。从探索性比较大,逐步减小
ϵ
\epsilon
ϵ,最终得到一个最优的策略。
总结
关键点:
- 基于Monte Carlo方法的Mean estimation
- 三个算法:
- MC Basic
- MC Exploring Starts
- MC ϵ \epsilon ϵ-Greedy
- 这三个算法之间的关系
- ϵ \epsilon ϵ-greedy policies的最优性和探索性
内容来源
- 《强化学习的数学原理》 西湖大学工学院赵世钰教授
- 《动手学强化学习》 俞勇 著