一、uboot 命令体系基础
1、使用 uboot 命令
(1) uboot 启动后进入命令行环境下,在此输入命令按回车结束,uboot 会收取这个命令然后解析,然后执行。
2、uboot 命令体系实现代码在哪里
(1) uboot 命令体系的实现代码在 uboot/common/cmd_xxx.c 中。有若干个 .c 文件和命令体系有关。(还有 command.c main.c 也是和命令有关的)
3、每个命令对应一个函数
(1) 每一个 uboot 的命令背后都对应一个函数。这就是 uboot 实现命令体系的一种思路和方法。
(2) 我们要找到每一个命令背后所对应的那个函数,而且要分析这个函数和这个命令是怎样对应起来的。
4、命令参数以 argc & argv 传给函数
(1) 有些 uboot 的命令还支持传递参数。也就是说命令背后对应的函数接收的参数列表中有 argc 和 argv,然后命令体系会把我们执行命令时的命令+参数(md 30000000 10)以 argc(3)和 argv(argv[0]=md, argv[1]=30000000 argv[2]=10)的方式传递给执行命令的函数。
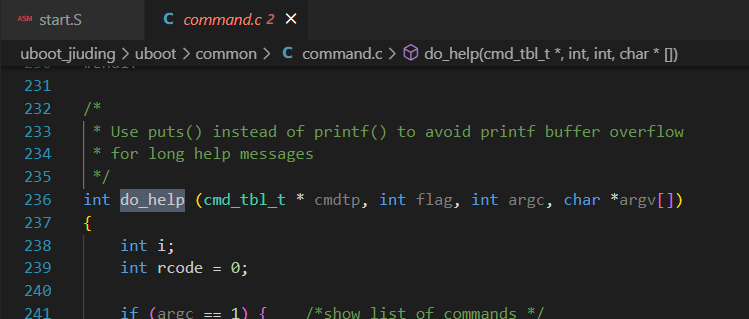
举例分析,以 help 命令为例:
help 命令背后对应的函数名叫:do_help。在 uboot/common/command.c 的236行。int do_help (cmd_tbl_t * cmdtp, int flag, int argc, char *argv[])
二、uboot 命令解析和执行过程分析
1、从 main_loop 说起
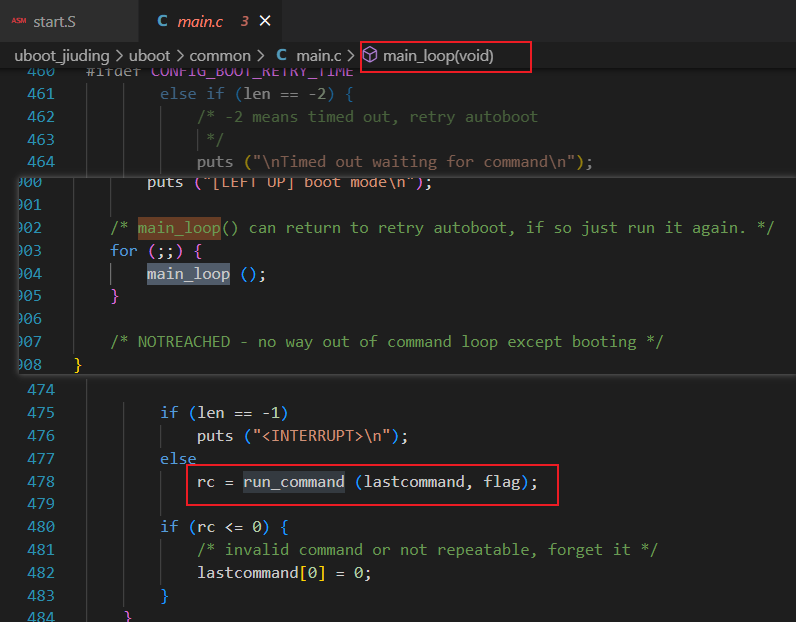
(1) uboot 启动的第二阶段,在初始化了所有该初始化的东西后,进入了一个死循环,死循环的循环体就是 main_loop。
(2) main_loop 函数执行一遍,就是一个获取命令、解析命令、执行命令的过程。
(3) run_command 函数就是用来执行命令的函数。
2、run_command 函数关键点分析
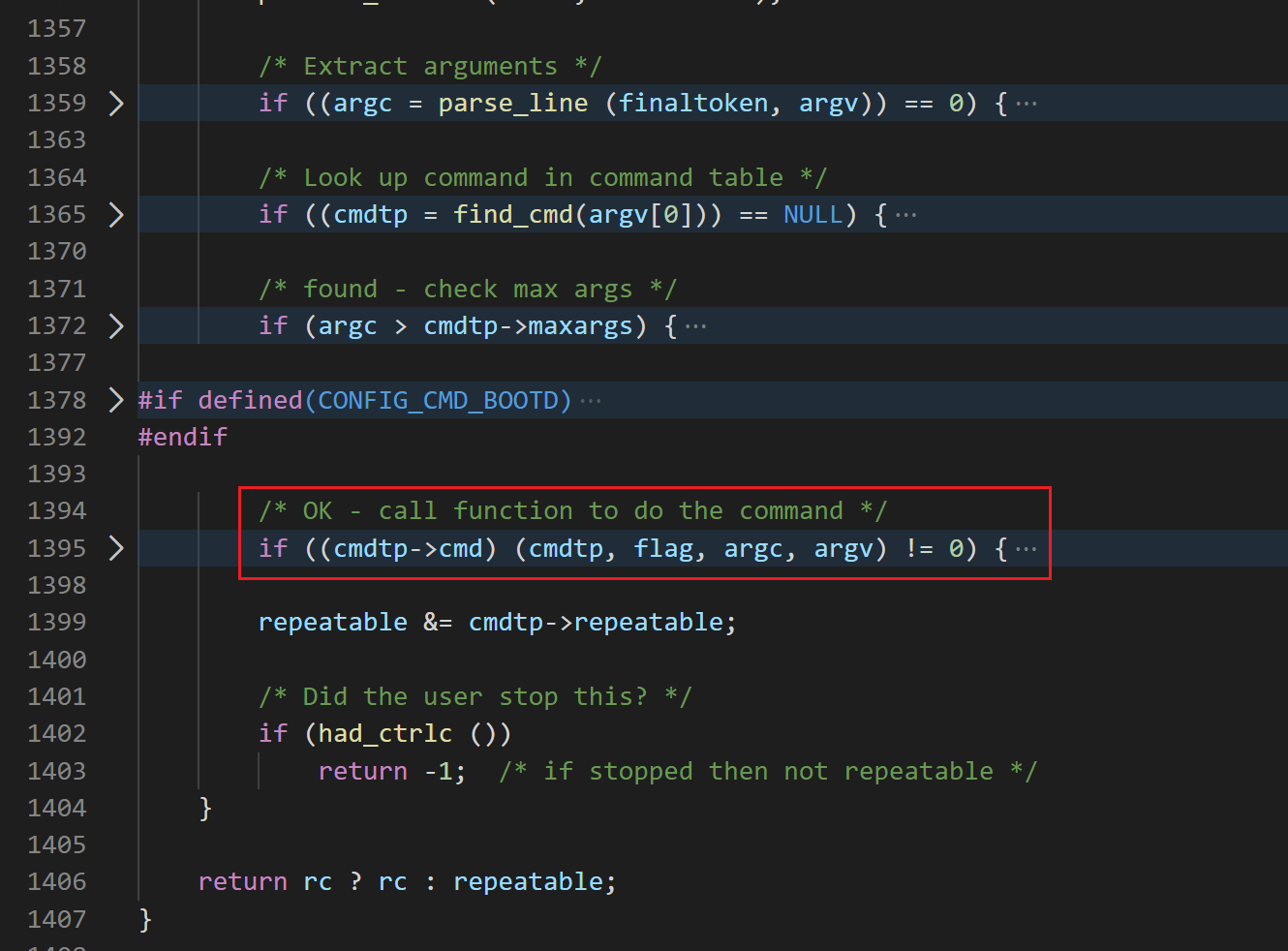
(1) 控制台命令获取;
(2) 命令解析。parse_line 函数把 “md 30000000 10” 解析成 argv[0]=md, argv[1]=30000000 argv[2]=10;

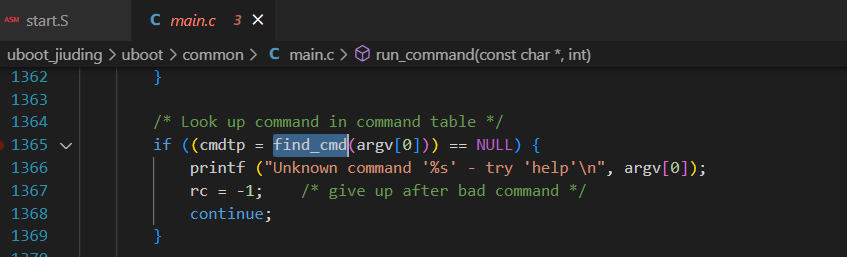
(3) 在命令集中去查找命令。find_cmd(argv[0]) 函数去 uboot 的命令集合当中搜索有没有 argv[0] 这个命令。

(4) 执行命令。最后用函数指针的方式调用执行了对应函数。
思考:关键点就在于 find_cmd 函数如何查找到这个命令是不是 uboot 的合法支持的命令?这取决于 uboot 的命令体系机制(uboot 是如何完成命令的这一套设计的,命令如何去注册、存储、管理、索引。)。
三、uboot如何处理命令集1
1、可能的管理方式
(1) 数组。结构体数组,数组中每一个结构体成员就是一个命令的所有信息。
(2) 链表。链表的每个节点 data 段就是一个命令结构体,所有的命令都放在一条链表上。这样就解决了数组方式的不灵活。坏处是需要额外的内存开销,然后各种算法(遍历、插入、删除等)需要一定复杂度的代码执行。
(3) 有第三种吗?uboot 没有使用数组或者链表,而是使用了一种新的方式来实现这个功能。
2、命令结构体 cmd_tbl_t
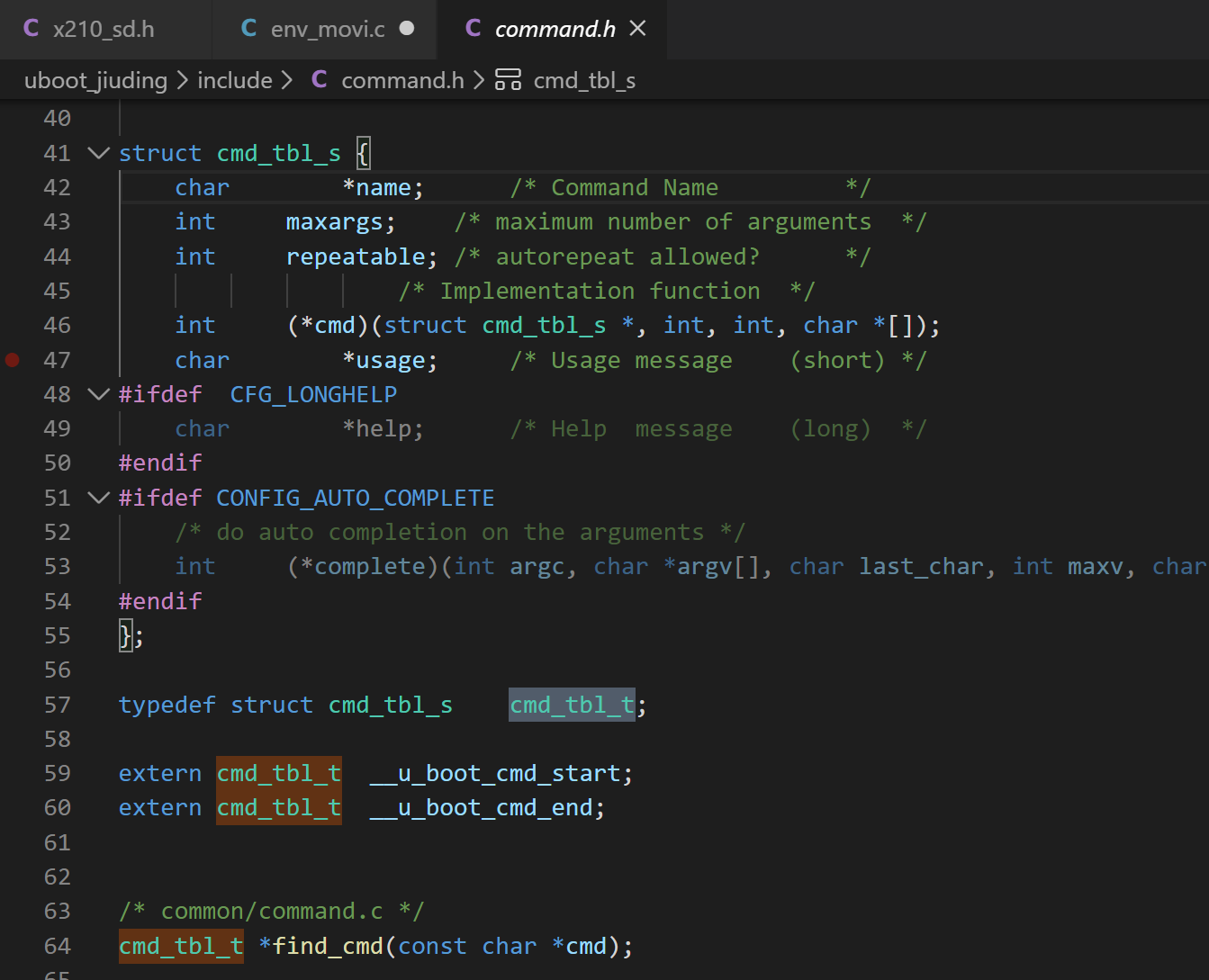
(1) name:命令名称,字符串格式。
(2) maxargs:命令最多可以接收多少个参数。
(3) repeatable:指示这个命令是否可重复执行。重复执行是 uboot 命令行的一种工作机制,就是直接按回车则执行上一条执行的命令。
(4) cmd:函数指针,命令对应的函数的函数指针,将来执行这个命令的函数时,使用这个函数指针来调用。
(5) usage:命令的短帮助信息。对命令的简单描述。
(6) help:命令的长帮助信息。细节的帮助信息。
(7) complete:函数指针,指向这个命令的自动补全的函数。
总结:uboot 的命令体系在工作时,一个命令对应一个 cmd_tbl_t 结构体的一个实例,然后 uboot 支持多少个命令,就需要多少个结构体实例。uboot 的命令体系把这些结构体实例管理起来,当用户输入了一个命令时,uboot 会去这些结构体实例中查找(查找方法和存储管理的方法有关)。如果找到则执行命令,如果未找到则提示命令未知。
3、uboot 实现命令管理的思路
(1) 填充 1 个结构体实例构成一个命令
(2) 给命令结构体实例附加特定段属性(用户自定义段),链接时将带有该段属性的内容链接在一起排列(挨着的,不会夹杂其他东西,也不会丢掉一个带有这种段属性的,但是顺序是乱序的)。
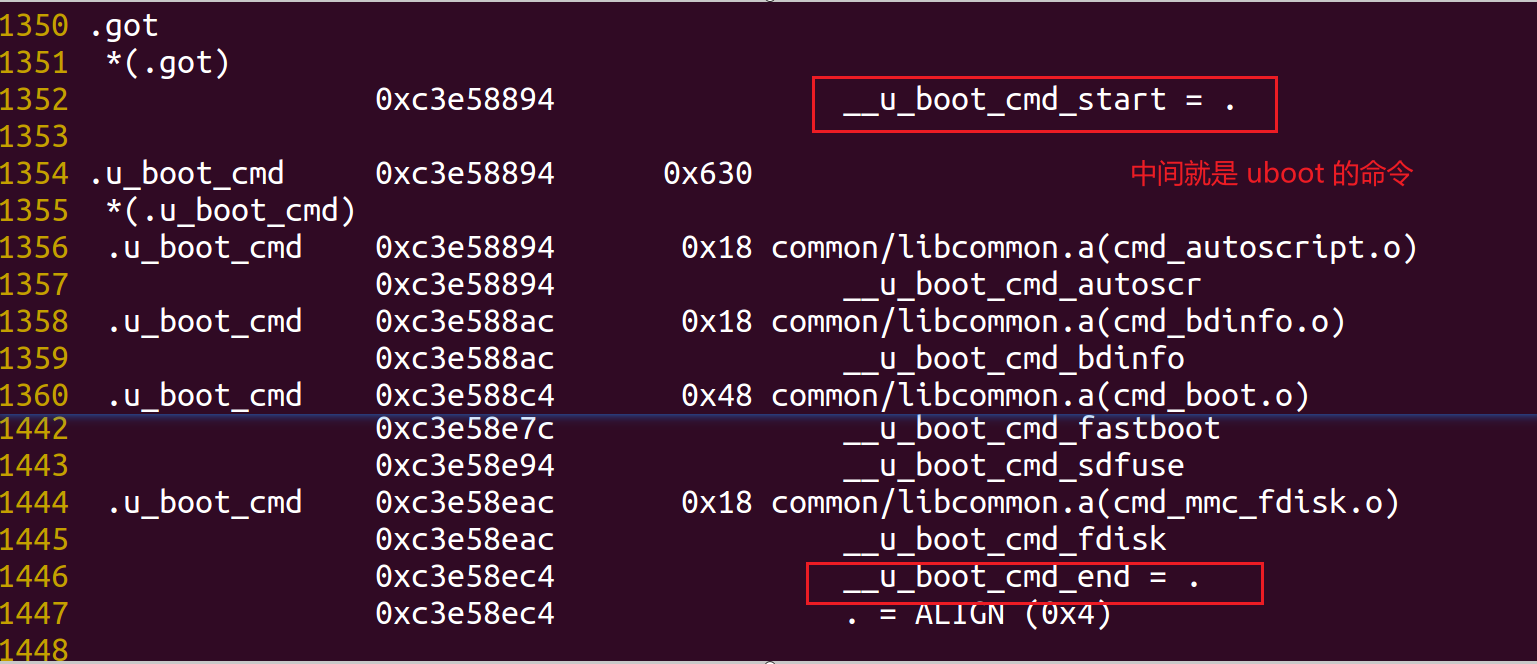
(3) uboot 重定位时,将该段整体加载到 DDR 中。加载到 DDR 中的 uboot 镜像中,带有特定段属性的这一段,其实就是命令结构体的集合,有点像一个命令结构体数组。
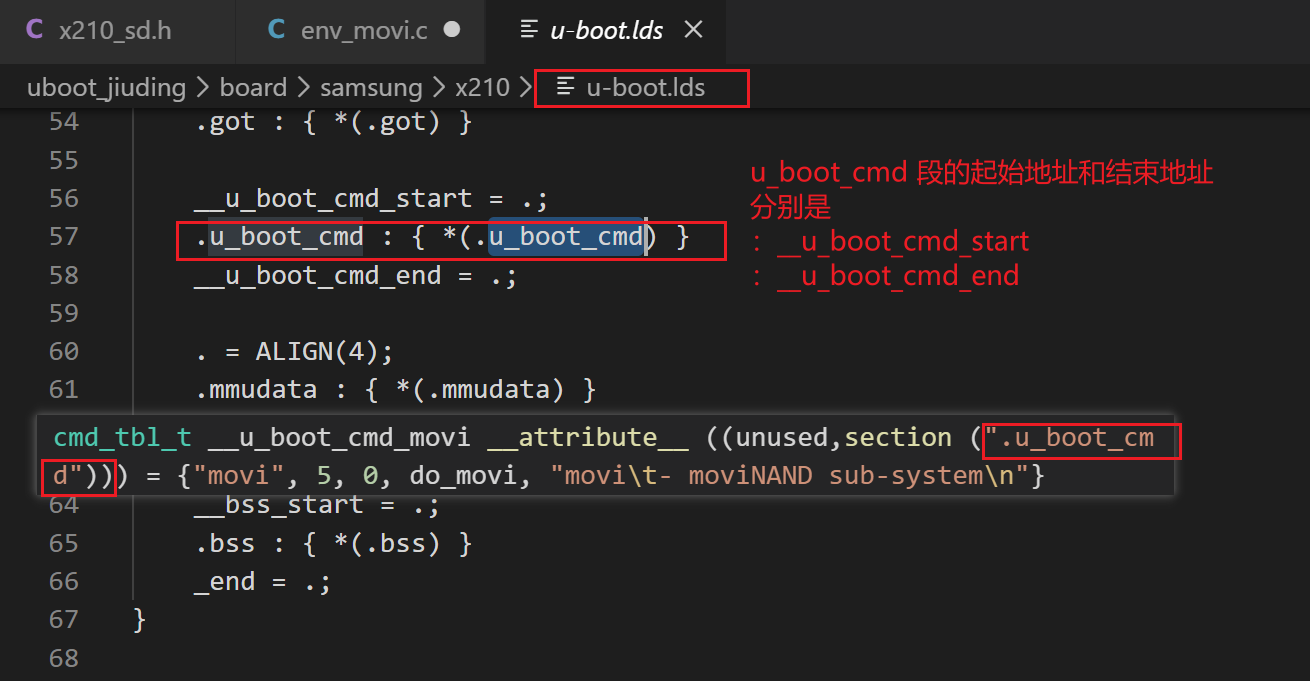
(4) 段起始地址和结束地址(链接地址、定义在 u-boot.lds 中)决定了这些命令集的开始和结束地址。
四、uboot 如何处理命令集2
1、uboot 命令定义具体实现分析
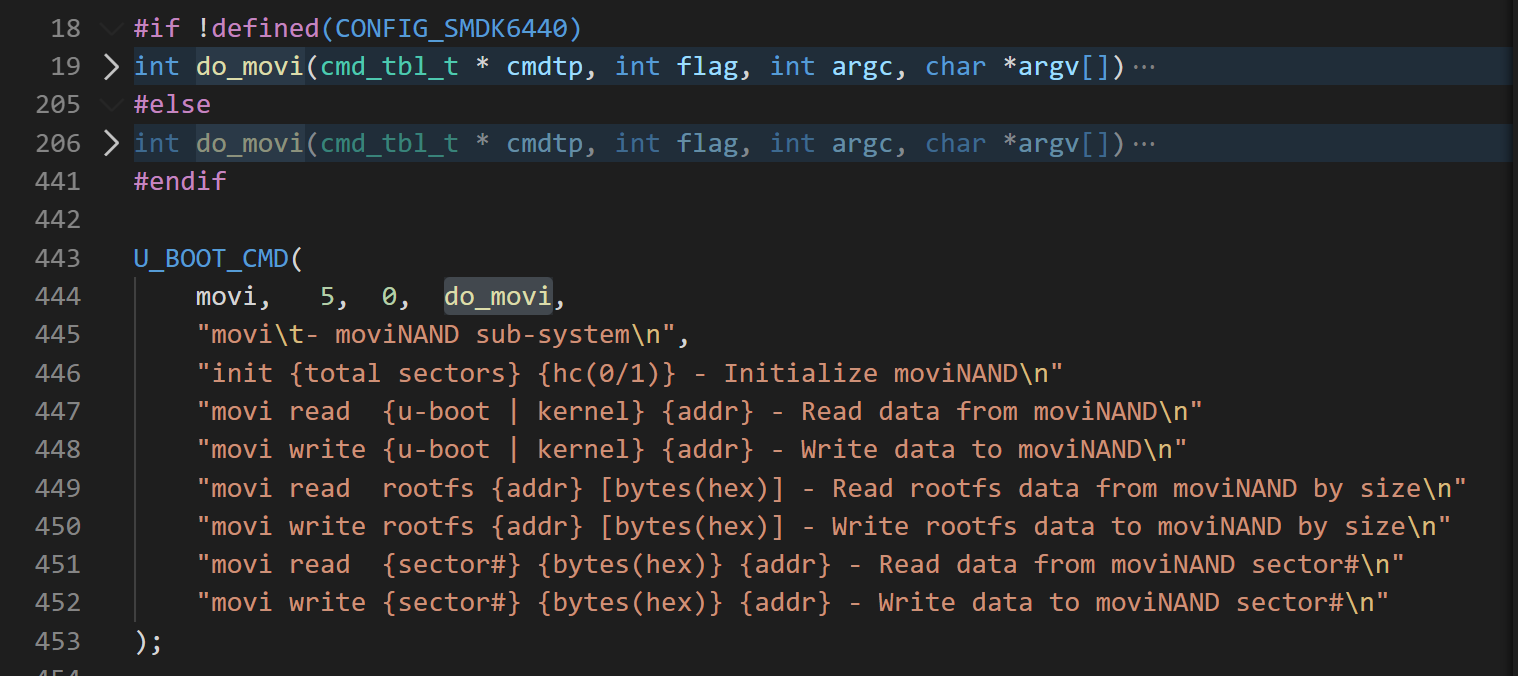
(1) U_BOOT_CMD 宏基本分析
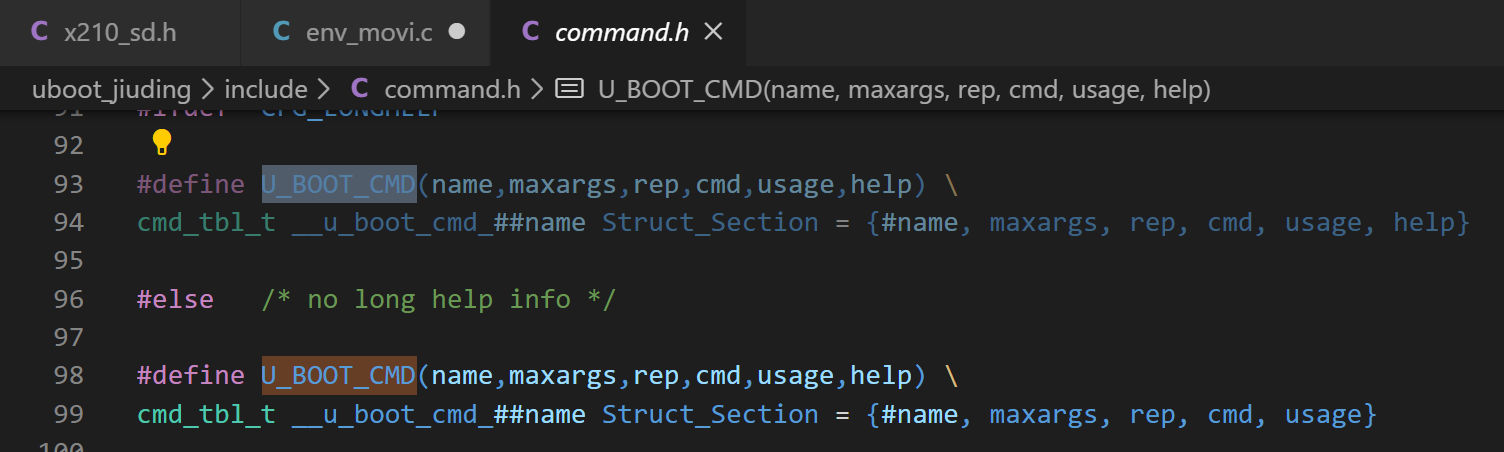
这个宏定义在 uboot/include/command.h 中。
U_BOOT_CMD(
version, 1, 1, do_version,
“version - print monitor version\n”,
NULL
);
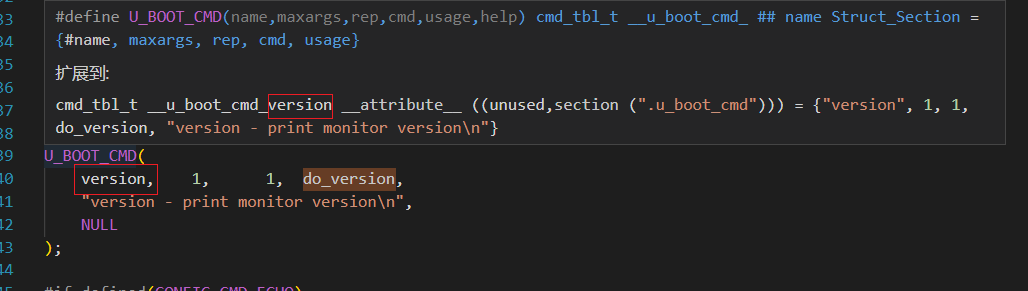
这个宏替换后变成:
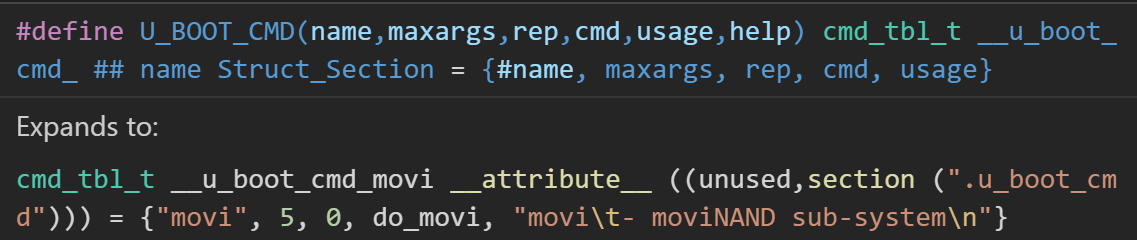
cmd_tbl_t __u_boot_cmd_version attribute ((unused,section (“.u_boot_cmd”))) = {#name, maxargs, rep, cmd, usage, help}
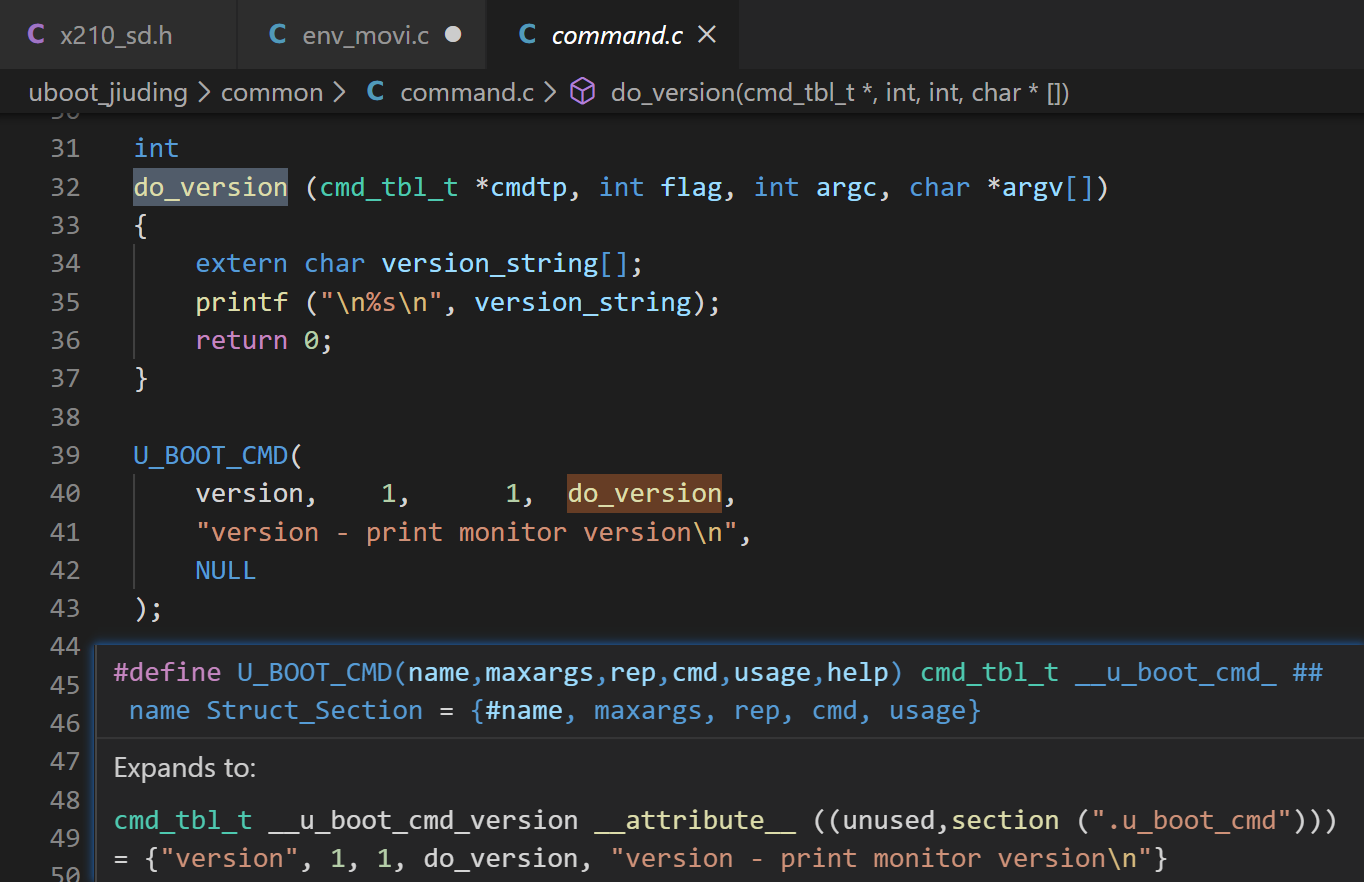
总结:这个 U_BOOT_CMD 宏的理解,关键在于结构体变量的名字和段属性。名字使用 ## 作为连字符,附加了用户自定义段属性,以保证链接时将这些数据结构链接在一起排布。
(2) 链接脚本。
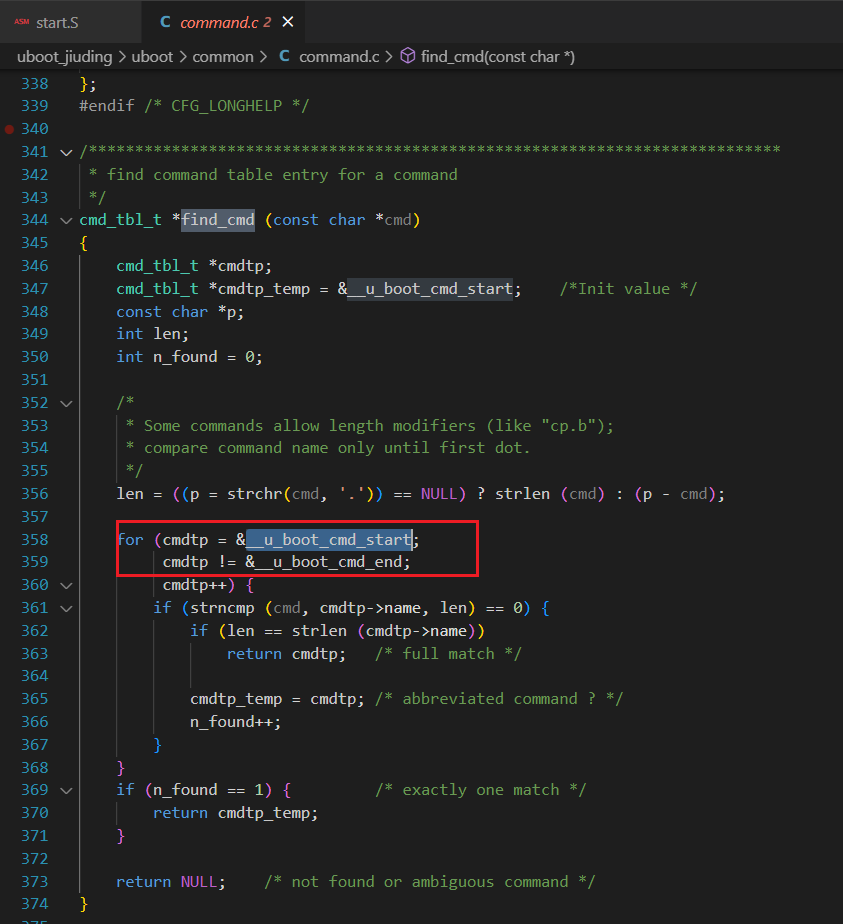
2、find_cmd 函数详解
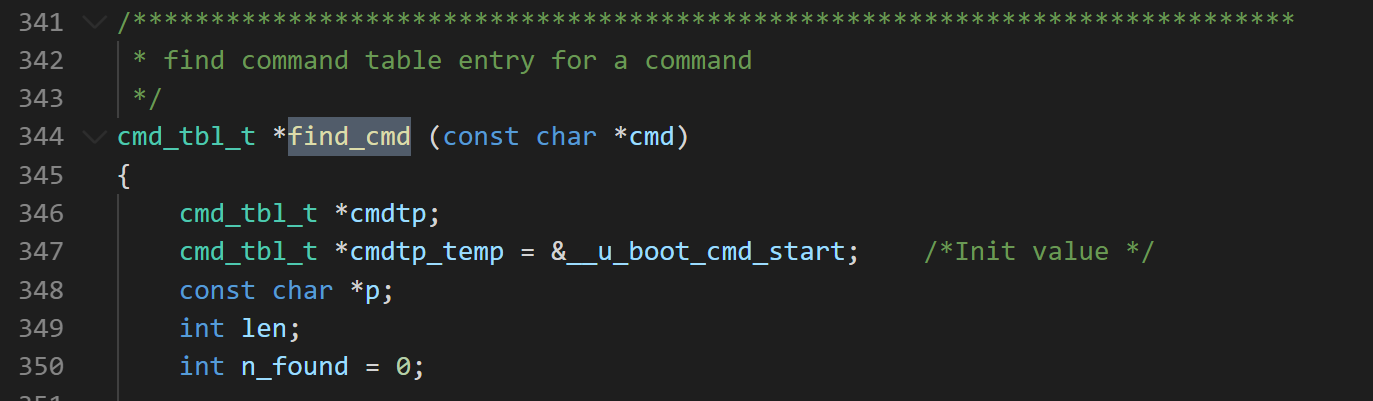
(1) find_cmd 函数的任务,是从当前 uboot 的命令集中查找是否有某个命令。如果找到则返回这个命令结构体的指针,如果未找到返回 NULL。
(2) 函数的实现思路很简单,如果不考虑命令带点的情况(md.b md.w 这种)就更简单了。查找命令的思路其实就是 for 循环遍历数组的思路,不同的是数组的起始地址和结束地址是用地址值来给定的,数组中的元素个数是结构体变量类型。
3、U_BOOT_CMD 宏详解
(1) 这个宏其实就是定义了一个命令对应的结构体变量,这个变量名和宏的第一个参数有关;因此只要宏调用时,传参的第一个参数不同,则定义的结构体变量不会重名。
4、命令举例:version 命令
五、uboot 中增加自定义命令
1、在已有的 c 文件中直接添加命令
(1) 在uboot/common/command.c中添加一个命令,叫:mycmd。
(2) 在已有的.c文件中添加命令比较简单,直接使用U_BOOT_CMD宏即可添加命令,给命令提供一个do_xxx的对应的函数这个命令就齐活了。
(3) 添加完成后要重新编译工程(make distclean; make x210_sd_config; make),然后烧录新的uboot去运行即可体验新命令。
(4)还可以在函数中使用argc和argv来验证传参。
2、自建一个 c 文件并添加命令
(1) 在uboot/common目录下新建一个命令文件,叫cmd_aston.c(对应的命令名就叫aston,对应的函数就叫do_aston函数),然后在c文件中添加命令对应的U_BOOT_CMD宏和函数。注意头文件包含不要漏掉。
(2) 在uboot/common/Makefile中添加上aston.o,目的是让Make在编译时能否把cmd_aston.c编译链接进去。
(3) 重新编译烧录。重新编译步骤是:make distclean; make x210_sd_config; make
3、体会:uboot 命令体系的优点
(1) uboot的命令体系本身稍微复杂,但是他写好之后就不用动了。我们后面在移植uboot时也不会去动uboot的命令体系。我们最多就是向uboot中去添加命令,就像本节课所做的这样。
(2) 向uboot中添加命令非常简单。
源自朱友鹏老师.