- 1. 插值
- 1.1 插值的一些概念
- 1.1.1 插值的定义
- 1.1.2 插值的存在性
- 1.1.3 插值的误差分析
- 1.2 拉格朗日插值(Lagrange Interpolation)
- 1.2.1 拉格朗日插值误差分析
- 1.3 Newton多项式插值
- 1.3.1 Newton多项式插值误差分析
- 1.4 Chebyshev多项式确定插值点
- 1.4.1 Chebyshev多项式性质
- 1.5 有理插值
- 1.5.1 有理插值误差分析
- 1.6 分段插值
- 1.6.1 分段线性插值
- 1.6.2 分段Hermite插值
- 1.6.2.1 Hermite插值误差
- 总结
- 2. 近似
- 2.1 近似的一些概念
- 2.2 帕德近似 (有理近似)
- 3. 拟合
- 3.1 最小二乘拟合
- 3.1.1 线性拟合
- 3.1.2 指数拟合
- 3.1.3 其他形式拟合(线性化思想)
- 3.1.4 一般线性最小二乘法形式
- 3.1.5 非线性最小二乘法
- 3.1.5.1 Levenberg-Marquardt方法
- 3.1.6 多项式拟合
- 3.1.7 拟合的问题
- 3.2 基于优化的拟合
- 3.3 基于概率分布的模型
- 3.4 非线性曲线拟合
- 3.4.1 逻辑回归
- 3.5 三角拟合
- 3.5.1 三角拟合的正交性质
- 3.6 分段三次样条曲线拟合
- 3.7 Bezier曲线拟合
- 3.8 Matlab函数
多项式方程如
f
(
x
)
=
1
+
x
;
f
(
x
)
=
x
2
+
x
4
f(x)=1+x ; \quad f(x)=x^{2}+x^{4}
f(x)=1+x;f(x)=x2+x4
非多项式方程如
f
(
x
)
=
e
x
f
(
x
)
=
sin
(
x
)
ln
(
x
)
f(x)=e^{x} \quad f(x)=\sin (x) \ln (x)
f(x)=exf(x)=sin(x)ln(x)
多项式方程对于计算机好计算,非多项式方程则不然,可以用多项式方程来计算非多项式方程吗?怎么用一个多项式方程来表示一个非多项式方程,是我们要解决的问题。
1. 插值
1.1 插值的一些概念
1.1.1 插值的定义
插值:给定一组点
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
,
.
.
.
,
(
x
n
,
y
n
)
(x_1,y_1),(x_2,y_2),...,(x_n,y_n)
(x1,y1),(x2,y2),...,(xn,yn),构造一个函数
y
=
f
(
x
)
y=f(x)
y=f(x),满足
y
i
=
f
(
x
i
)
,
i
=
1
,
2
,
.
.
.
,
n
y_i=f(x_i),i=1,2,...,n
yi=f(xi),i=1,2,...,n
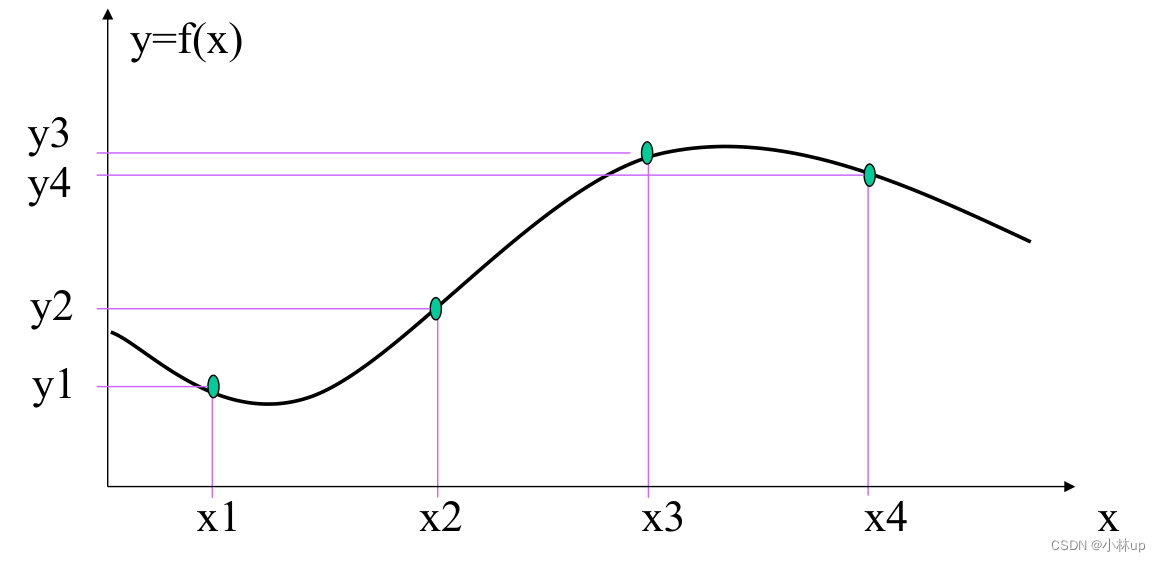
例子:
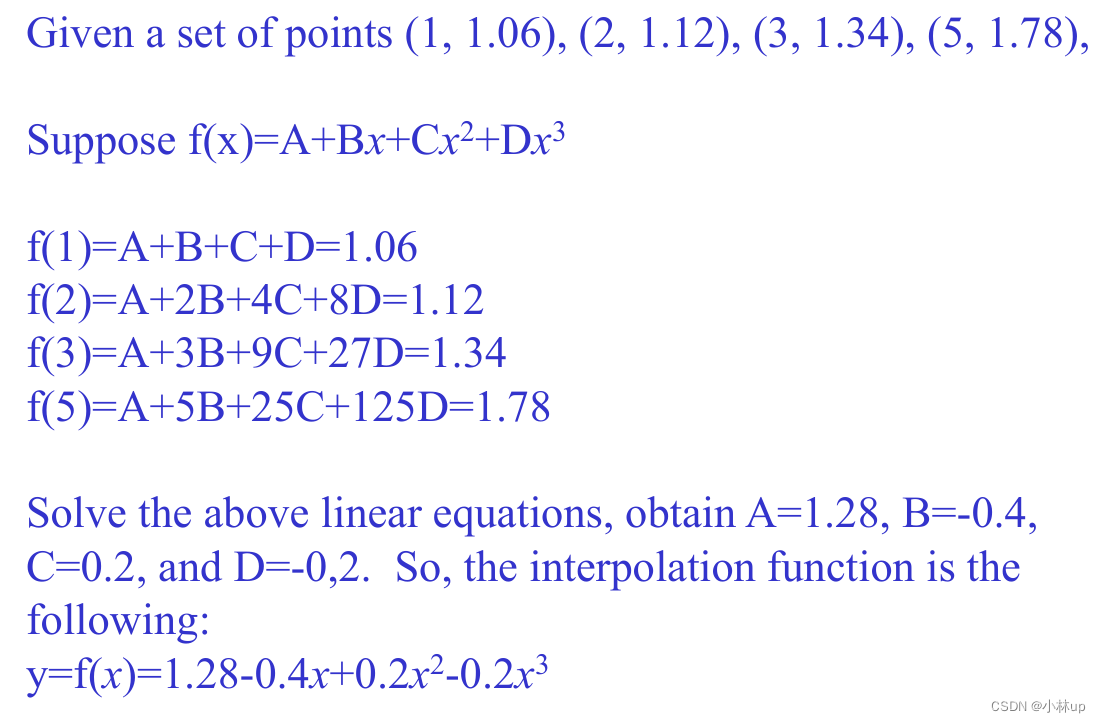
1.1.2 插值的存在性
设多项式方程为:
P
n
(
x
)
=
a
0
+
a
1
x
+
a
2
x
2
+
…
…
+
a
n
x
n
P
n
(
x
i
)
=
y
i
,
i
=
0
,
1
,
2
,
…
,
n
,
x
i
≠
x
j
P_{n}(x)=a_{0}+a_{1} x+a_{2} x^{2}+\ldots \ldots+a_{n} x^{\mathrm{n}}\\ P_{n}\left(x_{i}\right)=y_{i}, \quad \mathrm{i}=0,1,2, \ldots, \mathrm{n}, x_{i} \neq x_{\mathrm{j}}
Pn(x)=a0+a1x+a2x2+……+anxnPn(xi)=yi,i=0,1,2,…,n,xi=xj
有:
[
1
x
0
x
0
2
⋯
x
0
n
1
x
1
x
1
2
⋯
x
1
n
1
x
2
x
2
2
⋯
x
2
n
⋯
⋯
⋯
⋯
⋯
1
x
n
x
n
2
⋯
x
n
n
]
[
a
0
a
1
a
2
⋮
a
n
]
=
[
y
0
y
1
y
2
⋮
y
n
]
\begin{bmatrix} 1 & x_{0} & x_{0}^{2} &\cdots &x_0^n\\ 1 & x_{1} & x_{1}^{2} &\cdots &x_1^n\\ 1 & x_{2} & x_{2}^{2} &\cdots &x_2^n\\ \cdots & \cdots & \cdots & \cdots &\cdots \\ 1 & x_{n} & x_{n}^{2} &\cdots &x_n^n \end{bmatrix}\begin{bmatrix} a_{0} \\ a_{1} \\ a_{2}\\ \vdots\\ a_n \end{bmatrix}=\begin{bmatrix} y_{0} \\ y_{1} \\ y_{2}\\ \vdots\\ y_n \end{bmatrix}
111⋯1x0x1x2⋯xnx02x12x22⋯xn2⋯⋯⋯⋯⋯x0nx1nx2n⋯xnn
a0a1a2⋮an
=
y0y1y2⋮yn
也即
A
a
=
y
\mathbf{Aa}=\mathbf{y}
Aa=y的形式。
要求 A \mathbf{A} A行列式不等于0,根据vandermonde行列式,我们知道行列式:
∣ 1 x 0 x 0 2 ⋯ x 0 n 1 x 1 x 1 2 ⋯ x 1 n 1 x 2 x 2 2 ⋯ x 2 n ⋯ ⋯ ⋯ ⋯ ⋯ 1 x n x n 2 ⋯ x n n ∣ = ∏ n ≥ i > j ≥ 0 ( x i − x j ) \left|\begin{array}{ccccc} 1 & x_{0} & x_{0}^{2} &\cdots &x_0^n\\ 1 & x_{1} & x_{1}^{2} &\cdots &x_1^n\\ 1 & x_{2} & x_{2}^{2} &\cdots &x_2^n\\ \cdots & \cdots & \cdots & \cdots &\cdots \\ 1 & x_{n} & x_{n}^{2} &\cdots &x_n^n \end{array}\right|=\prod_{n \geq i>j \geq 0}\left(x_{i}-x_{j}\right) 111⋯1x0x1x2⋯xnx02x12x22⋯xn2⋯⋯⋯⋯⋯x0nx1nx2n⋯xnn =n≥i>j≥0∏(xi−xj)
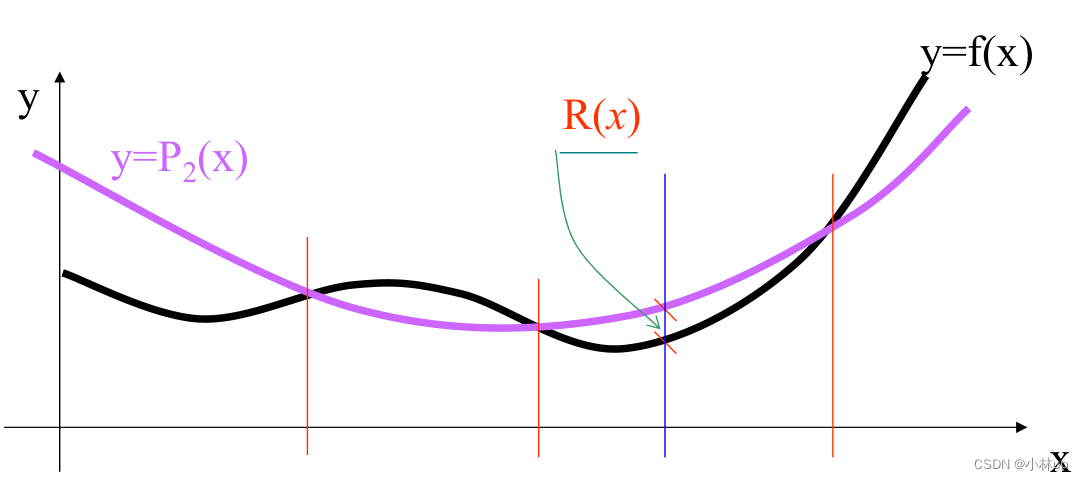
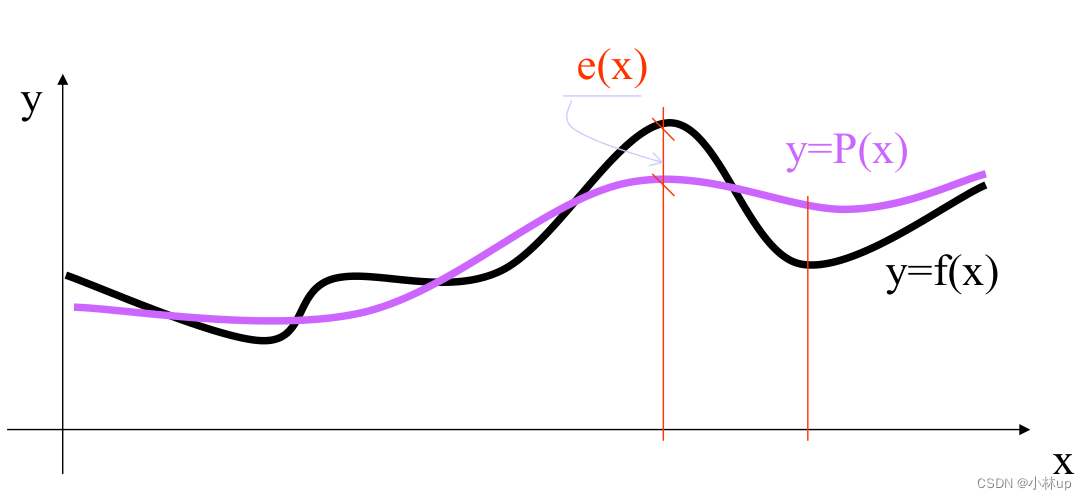
1.1.3 插值的误差分析
一般来说,如果点
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi)是任意选择的,我们无法进行误差分析。
但如果这些点是按顺序从一个已知的函数 f ( x ) f(x) f(x)中抽取的,这意味着 ( x i , y ) = ( x i , f ( x i ) ) (x_i,y)=(x_i,f(x_i)) (xi,y)=(xi,f(xi)),误差 R ( x ) = ∣ f ( x ) − P n ( x ) ∣ R(x)=|f(x)-P_n(x)| R(x)=∣f(x)−Pn(x)∣可以被预测到。
1.2 拉格朗日插值(Lagrange Interpolation)
给定一组点 ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) (x_1,y_1),(x_2,y_2),...,(x_N,y_N) (x1,y1),(x2,y2),...,(xN,yN)
y = P N ( x ) = y 0 L N , 0 ( x ) + y 1 L N , 1 ( x ) + … + y N L N , N ( x ) = ∑ k = 0 N y k L N , k ( x ) \begin{array}{l} y=P_{N}(x)=y_{0} L_{N, 0}(x)+y_{1} L_{N, 1}(x)+\ldots+y_{N} L_{N, N}(x) \\ =\sum_{k=0}^{N} y_{k} L_{N, k}(x) \end{array} y=PN(x)=y0LN,0(x)+y1LN,1(x)+…+yNLN,N(x)=∑k=0NykLN,k(x)
L N , k ( x ) = ( x − x 0 ) … ( x − x k − 1 ) ( x − x k + 1 ) … ( x − x N ) ( x k − x 0 ) … ( x k − x k − 1 ) ( x k − x k + 1 ) … ( x k − x N ) = ∏ j = 0 j ≠ k N ( x − x j ) ∏ j = 0 j ≠ k N ( x k − x j ) L N , k ( x 0 ) = 0 , … , L N , k ( x 1 ) = 0 , L N , k ( x k ) = 1 , L N , k ( x k + 1 ) = 0 , … , L N , k ( x N ) = 0 \begin{aligned} &L_{N, k}(x) = \frac{\left(x-x_{0}\right) \ldots\left(x-x_{k-1}\right)\left(x-x_{k+1}\right) \ldots\left(x-x_{N}\right)}{\left(x_{k}-x_{0}\right) \ldots\left(x_{k}-x_{k-1}\right)\left(x_{k}-x_{k+1}\right) \ldots\left(x_{k}-x_{N}\right)} = \frac{\prod_{\substack{j = 0 j \neq k}}^{N}\left(x-x_{j}\right)}{\prod_{\substack{j = 0 j \neq k}}^{N}\left(x_{k}-x_{j}\right)} \\ &L_{N, k}\left(x_{0}\right) = 0, \ldots, L_{N, k}\left(x_{1}\right) = 0, L_{N, k}\left(x_{k}\right) = 1, L_{N, k}\left(x_{k+1}\right) = 0, \ldots, L_{N, k}\left(x_{N}\right) = 0 \end{aligned} LN,k(x)=(xk−x0)…(xk−xk−1)(xk−xk+1)…(xk−xN)(x−x0)…(x−xk−1)(x−xk+1)…(x−xN)=∏j=0j=kN(xk−xj)∏j=0j=kN(x−xj)LN,k(x0)=0,…,LN,k(x1)=0,LN,k(xk)=1,LN,k(xk+1)=0,…,LN,k(xN)=0
1.2.1 拉格朗日插值误差分析
定理:假设 f ( x ) f(x) f(x)在 [ a , b ] [a,b] [a,b]上是 ( n + 1 ) (n +1) (n+1)阶可微, L n ( x ) L_n(x) Ln(x)是拉格朗日函数,那么误差估计如下
R n ( x ) = f ( x ) − P n ( x ) = f ( n + 1 ) ( ξ ) ( n + 1 ) ! ∏ k = 0 n ( x − x k ) , ξ ∈ [ x 0 , x n ] R_{n}(x)=f(x)-P_{n}(x)=\frac{f^{(n+1)}(\xi)}{(n+1) !} \prod_{k=0}^{n}\left(x-x_{k}\right), \quad \xi \in\left[x_{0}, x_{n}\right] Rn(x)=f(x)−Pn(x)=(n+1)!f(n+1)(ξ)k=0∏n(x−xk),ξ∈[x0,xn]
证明:
设 w ( x ) = ∏ k = 0 n ( x − x k ) 令 R ( t ) = f ( t ) − f ( x ) − P n ( x ) w ( x ) w ( t ) − P n ( t ) 有 R ( x i ) = f ( x i ) − f ( x ) − P n ( x ) w ( x ) w ( x i ) − P n ( x i ) = 0 R ( x ) = f ( x ) − f ( x ) − P n ( x ) w ( x ) w ( x ) − P n ( x ) = 0 \begin{aligned} 设&w(x) = \prod_{k = 0}^{n}\left(x-x_{k}\right) \\ 令&R(t) = f(t)-\frac{f(x)-P_{n}(x)}{w(x)} w(t)-P_{n}(t) \\ 有&R\left(x_{i}\right) = f\left(x_{i}\right)-\frac{f(x)-P_{n}(x)}{w(x)} w\left(x_{i}\right)-P_{n}\left(x_{i}\right) = 0 \\ &R(x) = f(x)-\frac{f(x)-P_{n}(x)}{w(x)} w(x)-P_{n}(x) = 0 \end{aligned} 设令有w(x)=k=0∏n(x−xk)R(t)=f(t)−w(x)f(x)−Pn(x)w(t)−Pn(t)R(xi)=f(xi)−w(x)f(x)−Pn(x)w(xi)−Pn(xi)=0R(x)=f(x)−w(x)f(x)−Pn(x)w(x)−Pn(x)=0于是 R ( t ) R(t) R(t)有 n + 2 n+2 n+2个根: x 0 , x 1 , ⋯ , x n , x x_0,x_1,\cdots,x_n,x x0,x1,⋯,xn,x,使用罗尔定理, R R R的 n + 1 n+1 n+1阶导数 R ( n + 1 ) ( x ) R^{(n+1)}(x) R(n+1)(x)至少有一个根,使得 R ( n + 1 ) ( ξ ) = 0 ξ ∈ [ x 0 , x n ] R^{(n+1)}(\xi)=0\quad \xi\in[x_0,x_n] R(n+1)(ξ)=0ξ∈[x0,xn],于是:
R ( n + 1 ) ( t ) = f ( n + 1 ) ( t ) − f ( x ) − P n ( x ) w ( x ) w ( n + 1 ) ( t ) − P n ( n + 1 ) ( t ) = f ( n + 1 ) ( t ) − f ( x ) − P n ( x ) w ( x ) ( n + 1 ) ! R ( n + 1 ) ( ξ ) = f ( n + 1 ) ( ξ ) − f ( x ) − P n ( x ) w ( x ) ( n + 1 ) ! = 0 f ( x ) − P n ( x ) = f ( n + 1 ) ( ξ ) w ( x ) / ( n + 1 ) ! \begin{aligned} &R^{(n+1)}(t) = f^{(n+1)}(t)-\frac{f(x)-P_{n}(x)}{w(x)} w^{(n+1)}(t)-P_{n}^{(n+1)}(t) \\ &= f^{(n+1)}(t)-\frac{f(x)-P_{n}(x)}{w(x)}(n+1) ! \\ &R^{(n+1)}(\xi) = f^{(n+1)}(\xi)-\frac{f(x)-P_{n}(x)}{w(x)}(n+1) ! = 0 \\ &f(x)-P_{n}(x) = f^{(n+1)}(\xi) w(x) /(n+1) ! \end{aligned} R(n+1)(t)=f(n+1)(t)−w(x)f(x)−Pn(x)w(n+1)(t)−Pn(n+1)(t)=f(n+1)(t)−w(x)f(x)−Pn(x)(n+1)!R(n+1)(ξ)=f(n+1)(ξ)−w(x)f(x)−Pn(x)(n+1)!=0f(x)−Pn(x)=f(n+1)(ξ)w(x)/(n+1)!
可以导出的其他性质:
w ( x ) = ∏ k = 0 n ( x − x k ) w ′ ( x ) = ( x − x 1 ) ( x − x 2 ) … ( x − x n ) + ( x − x 0 ) ( x − x 2 ) … + … L n , k ( x ) = ( x − x 0 ) … ( x − x k − 1 ) ( x − x k + 1 ) … ( x − x n ) / w ′ ( x k ) \begin{aligned} &w(x) = \prod_{k = 0}^{n}\left(x-x_{k}\right) \\ &w^{\prime}(x) = \left(x-x_{1}\right)\left(x-x_{2}\right) \ldots\left(x-x_{n}\right)+\left(x-x_{0}\right)\left(x-x_{2}\right) \ldots+\ldots \\ &L_{n, k}(x) = \left(x-x_{0}\right) \ldots\left(x-x_{k-1}\right)\left(x-x_{k+1}\right) \ldots\left(x-x_{n}\right) / w^{\prime}\left(x_{k}\right) \end{aligned} w(x)=k=0∏n(x−xk)w′(x)=(x−x1)(x−x2)…(x−xn)+(x−x0)(x−x2)…+…Ln,k(x)=(x−x0)…(x−xk−1)(x−xk+1)…(x−xn)/w′(xk)
于是有:
∑ k = 0 n L n , k ( x ) = ∑ k = 0 n ( x − x 0 ) … ( x − x k − 1 ) ( x − x k + 1 ) … ( x − x n ) / w ′ ( x k ) ≡ 1 \sum_{k=0}^{n} L_{n, k}(x)=\sum_{k=0}^{n}\left(x-x_{0}\right) \ldots\left(x-x_{k-1}\right)\left(x-x_{k+1}\right) \ldots\left(x-x_{n}\right) / w^{\prime}\left(x_{k}\right) \equiv 1 k=0∑nLn,k(x)=k=0∑n(x−x0)…(x−xk−1)(x−xk+1)…(x−xn)/w′(xk)≡1
证明: 令 f ( x ) = 1 , 给定一系列点 ( x i , 1 ) , i.e. y i = 1 , P n ( x ) = ∑ i = 0 n L n , i ( x ) , R ( x ) ≡ 0 \text { 令} f(x)=1,给定一系列点\left(x_{\mathrm{i}}, 1\right) \text {, i.e. } y_{\mathrm{i}}=1, \quad P_{n}(x)=\sum_{i=0}^{n} L_{n, i}(x), R(x) \equiv 0 令f(x)=1,给定一系列点(xi,1), i.e. yi=1,Pn(x)=i=0∑nLn,i(x),R(x)≡0
如何预测误差的边界
分别找到 f n + 1 f^{n+1} fn+1和 w ( x ) w(x) w(x)的上界有:
∣ f ( n + 1 ) ( x ) ∣ < M n ∣ w ( x ) ∣ = ∣ ∏ k = 0 n ( x − x k ) ∣ < W n \begin{aligned} &\left|{f}^{({n}+1)}({x})\right|<{M}_{{n}}\\ &|w({x})|=\left|\prod_{k=0}^{n}\left(x-x_{k}\right) \right|<W_{\mathrm{n}}\end{aligned} f(n+1)(x) <Mn∣w(x)∣= k=0∏n(x−xk) <Wn
于是有:
∣ R n ( x ) ∣ = ∣ f ( n + 1 ) ( ξ ) ( n + 1 ) ! ∏ k = 0 n ( x − x k ) ∣ < M n W n ( n + 1 ) ! \left|R_{n}(x)\right|=\left|\frac{f^{(n+1)}(\xi)}{(n+1) !} \prod_{k=0}^{n}\left(x-x_{k}\right)\right|<\frac{M_{n} W_{n}}{(n+1) !} ∣Rn(x)∣= (n+1)!f(n+1)(ξ)k=0∏n(x−xk) <(n+1)!MnWn
如果 x k = x 0 + k h , x_{k}=x_{0}+k h, \quad xk=x0+kh, 则 W 1 = h 2 4 , W 2 = 2 h 3 3 3 , W 3 = h 4 W_{1}=\frac{h^{2}}{4}, W_{2}=\frac{2 h^{3}}{3 \sqrt{3}}, W_{3}=h^{4} W1=4h2,W2=332h3,W3=h4
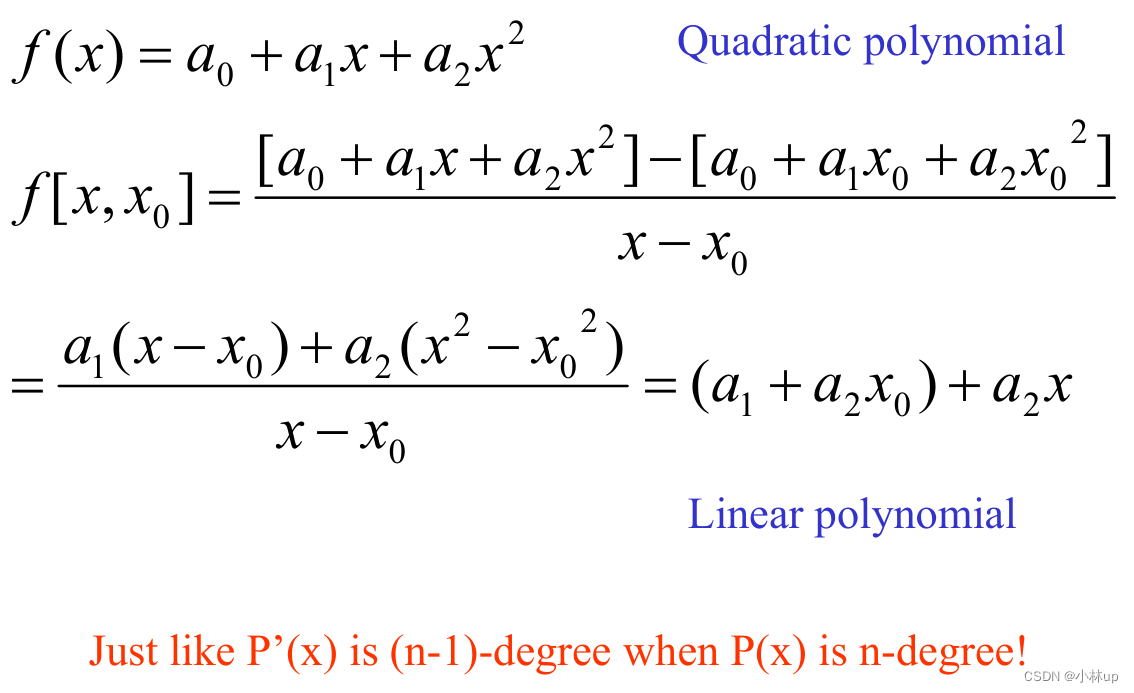
1.3 Newton多项式插值
给定一组点 ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) (x_1,y_1),(x_2,y_2),...,(x_N,y_N) (x1,y1),(x2,y2),...,(xN,yN)
我们观察这样一个递推序列:
P N ( x ) = P N − 1 ( x ) + a N ( x − x 0 ) ( x − x 1 ) … ( x − x N − 1 ) P_{N}(x)=P_{N-1}(x)+a_{N}\left(x-x_{0}\right)\left(x-x_{1}\right) \ldots\left(x-x_{N-1}\right) PN(x)=PN−1(x)+aN(x−x0)(x−x1)…(x−xN−1)
怎么求其中的系数呢?例子:给两个点和三个点的插值如下:
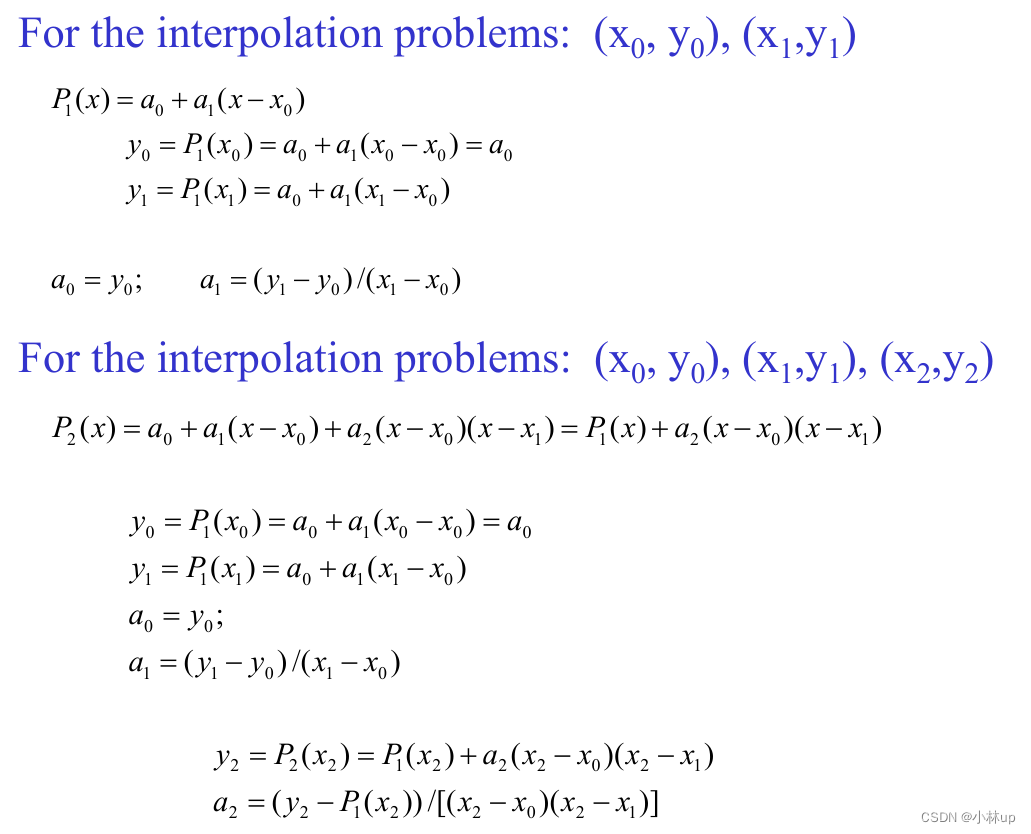
我们把三点的插值的
a
2
a_2
a2计算一下,可以发现Newton的系数和微分很像!
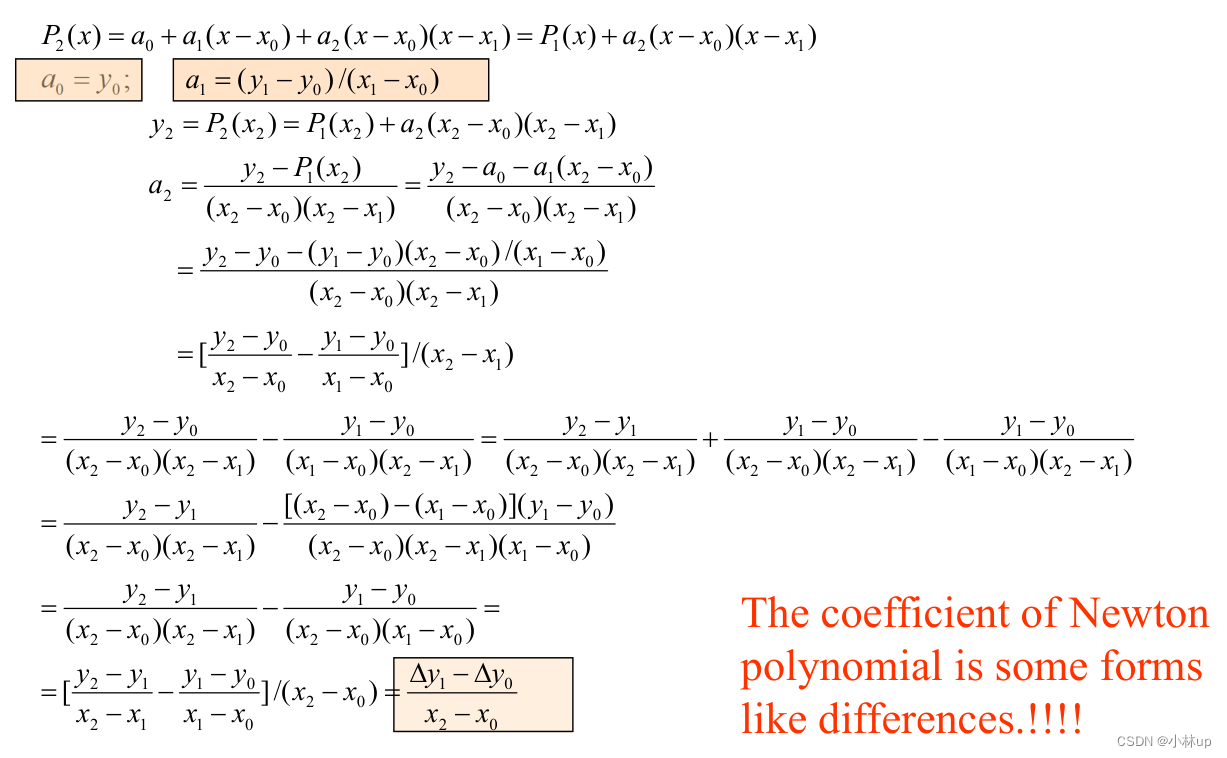
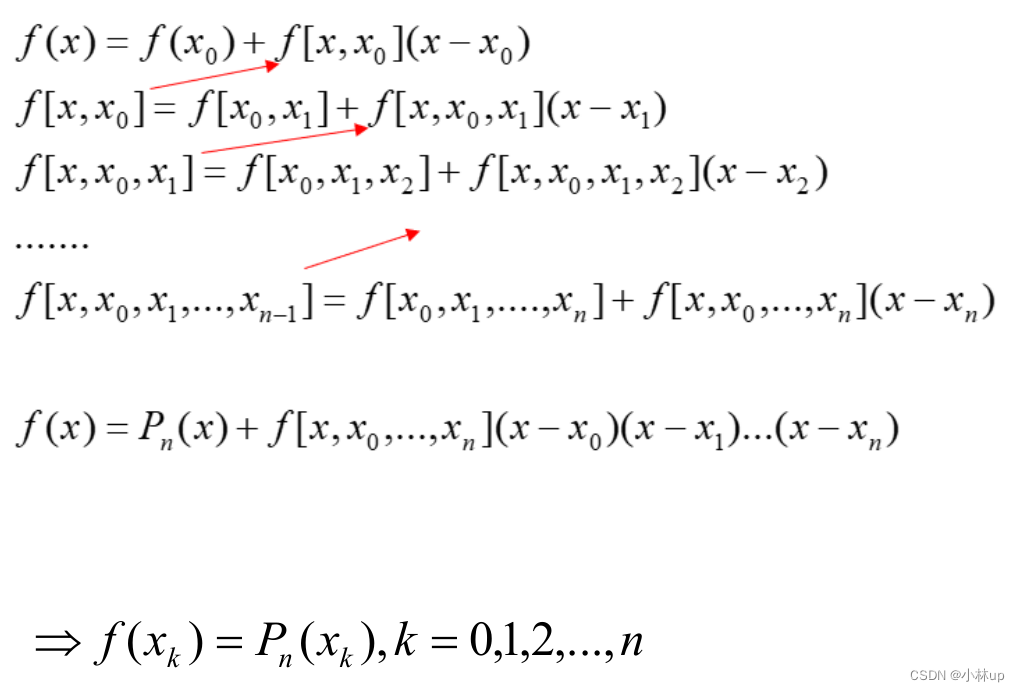
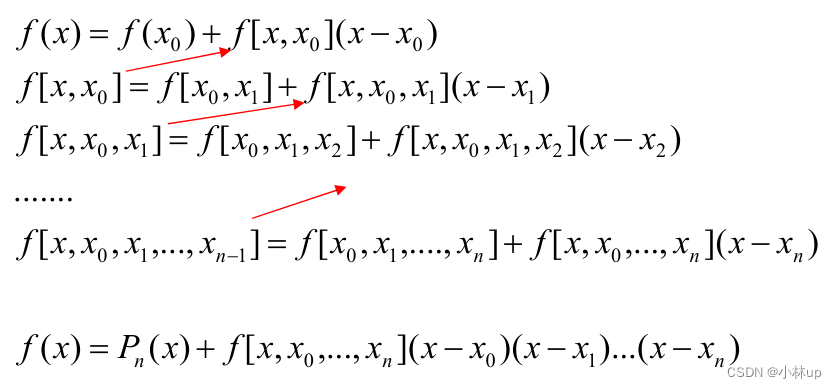
于是我们可以给出多个点的递推公式:
P
N
(
x
)
=
a
0
+
a
1
(
x
−
x
0
)
+
a
1
(
x
−
x
0
)
(
x
−
x
1
)
+
a
1
(
x
−
x
0
)
(
x
−
x
1
)
(
x
−
x
2
)
+
…
+
a
N
(
x
−
x
0
)
(
x
−
x
1
)
…
(
x
−
x
N
−
1
)
a
k
=
f
[
x
0
,
x
1
,
…
,
x
k
]
\begin{array}{l} P_{N}(x)=a_{0}+a_{1}\left(x-x_{0}\right)+a_{1}\left(x-x_{0}\right)\left(x-x_{1}\right)+a_{1}\left(x-x_{0}\right)\left(x-x_{1}\right)\left(x-x_{2}\right)+ \\ \quad \ldots+a_{N}\left(x-x_{0}\right)\left(x-x_{1}\right) \ldots\left(x-x_{N-1}\right) \\ a_{k}=f\left[x_{0}, x_{1}, \ldots, x_{k}\right] \end{array}
PN(x)=a0+a1(x−x0)+a1(x−x0)(x−x1)+a1(x−x0)(x−x1)(x−x2)+…+aN(x−x0)(x−x1)…(x−xN−1)ak=f[x0,x1,…,xk]
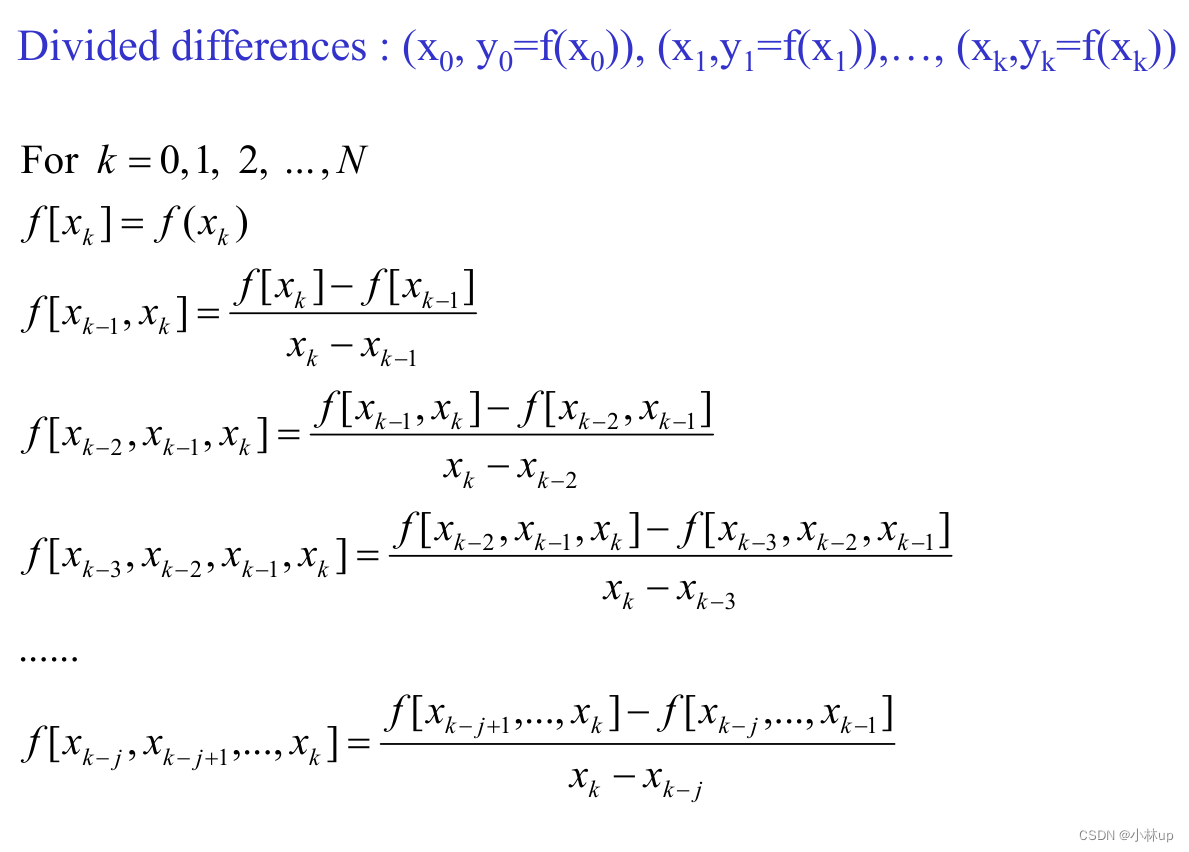
其中
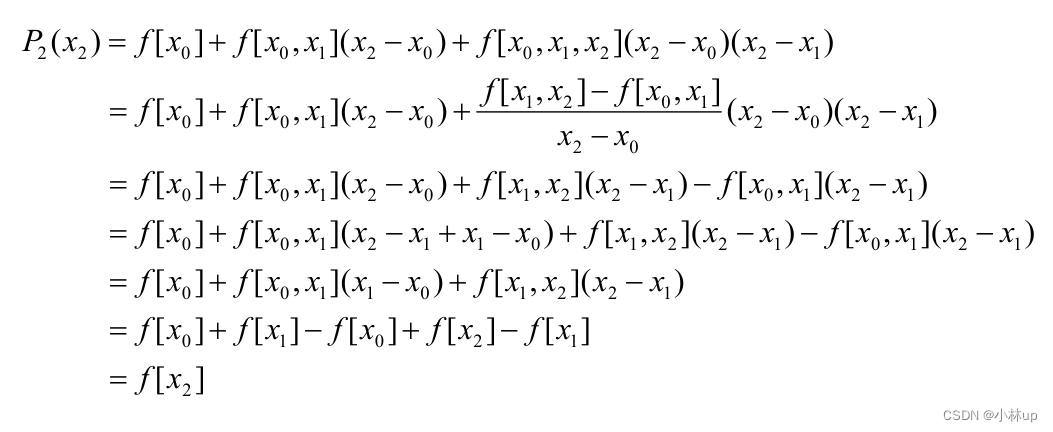
可以验算一下 P 2 P_2 P2
差分计算和微分也很相似,二次经过差分变一次。 P ( x ) P(x) P(x)是 n n n次多项式, P ′ ( x ) P'(x) P′(x)是 n − 1 n-1 n−1次多项式。
性质:如果 f ( x ) f(x) f(x)是 n n n次多项式,那么 f [ x , x 0 , x 1 , ⋯ , x n ] = 0 f[x,x_0,x_1,\cdots,x_n]=0 f[x,x0,x1,⋯,xn]=0
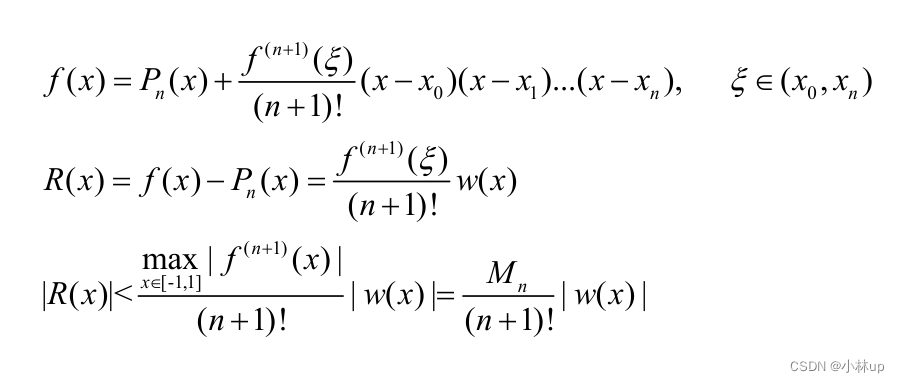
1.3.1 Newton多项式插值误差分析
如果 f ( x ) f(x) f(x)是 n n n次多项式,误差为:
R n ( x ) = f ( x ) − P n ( x ) = f [ x , x 0 , … , x n ] ( x − x 0 ) ( x − x 1 ) … ( x − x n ) R_{n}(x)=f(x)-P_{n}(x)=f\left[x, x_{0}, \ldots, x_{n}\right]\left(x-x_{0}\right)\left(x-x_{1}\right) \ldots\left(x-x_{n}\right) Rn(x)=f(x)−Pn(x)=f[x,x0,…,xn](x−x0)(x−x1)…(x−xn)
对于拉格朗日插值我们又知道:
R n ( x ) = f ( n + 1 ) ( ξ ) ( n + 1 ) ! ( x − x 0 ) ( x − x 1 ) … ( x − x n ) R_{n}(x)=\frac{f^{(n+1)}(\xi)}{(n+1) !}\left(x-x_{0}\right)\left(x-x_{1}\right) \ldots\left(x-x_{n}\right) Rn(x)=(n+1)!f(n+1)(ξ)(x−x0)(x−x1)…(x−xn)
于是有:
f [ x , x 0 , … , x n ] = f ( n + 1 ) ( ξ ) ( n + 1 ) ! f\left[x, x_{0}, \ldots, x_{n}\right]=\frac{f^{(n+1)}(\xi)}{(n+1) !} f[x,x0,…,xn]=(n+1)!f(n+1)(ξ)
当
n
n
n的0,就变成中值定理。
于是我们知道拉格朗日插值和Newton插值可以互换。只是形式不同。
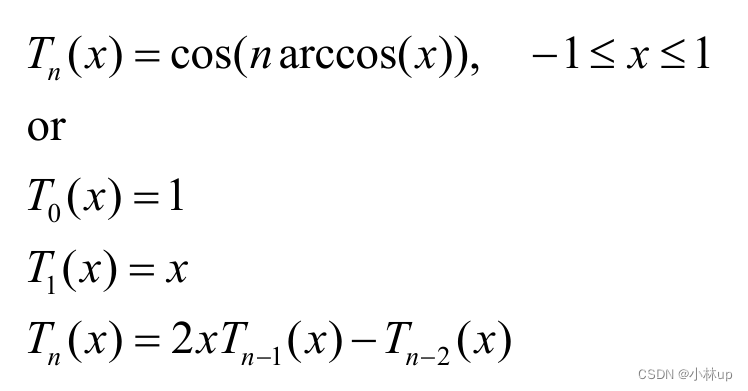
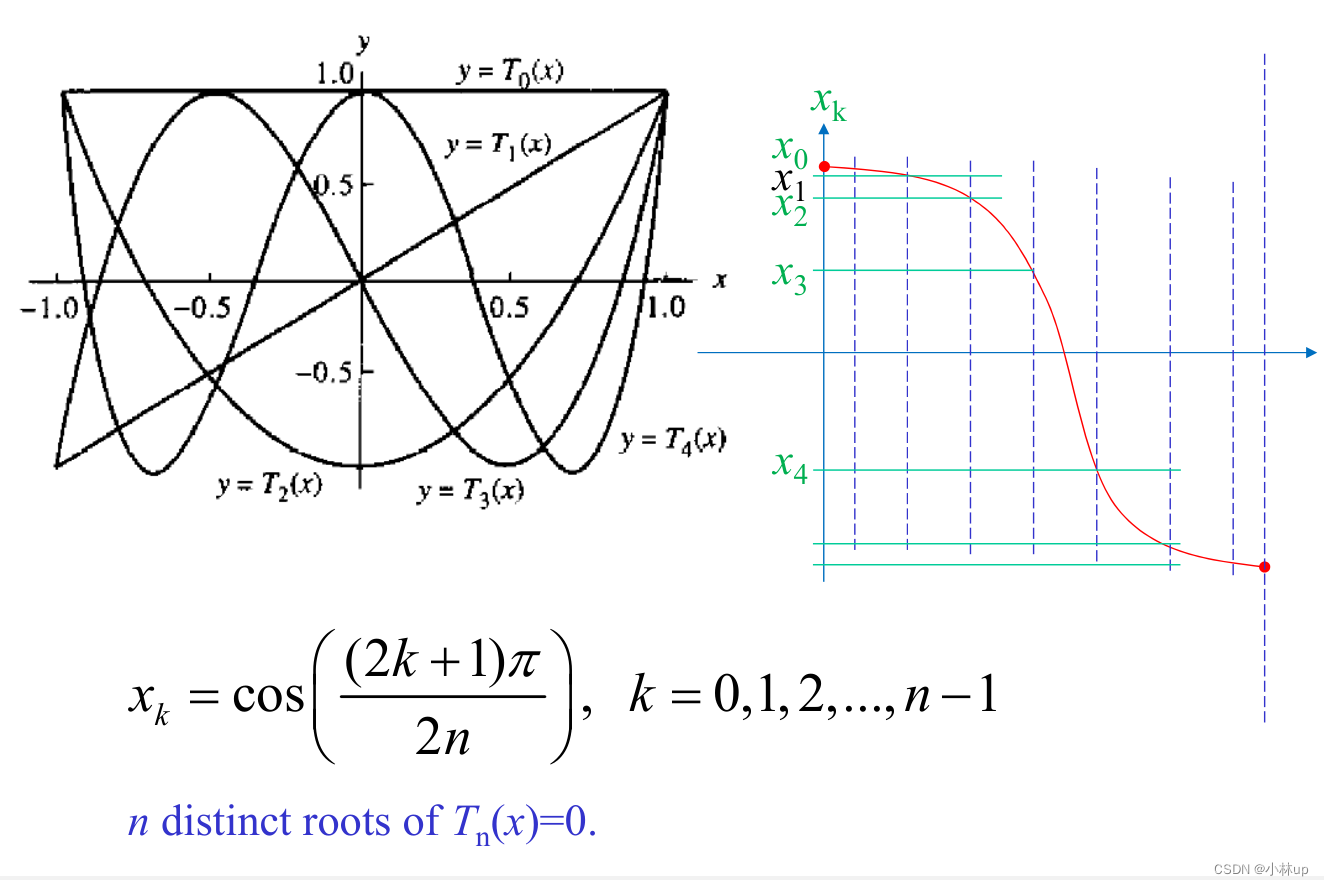
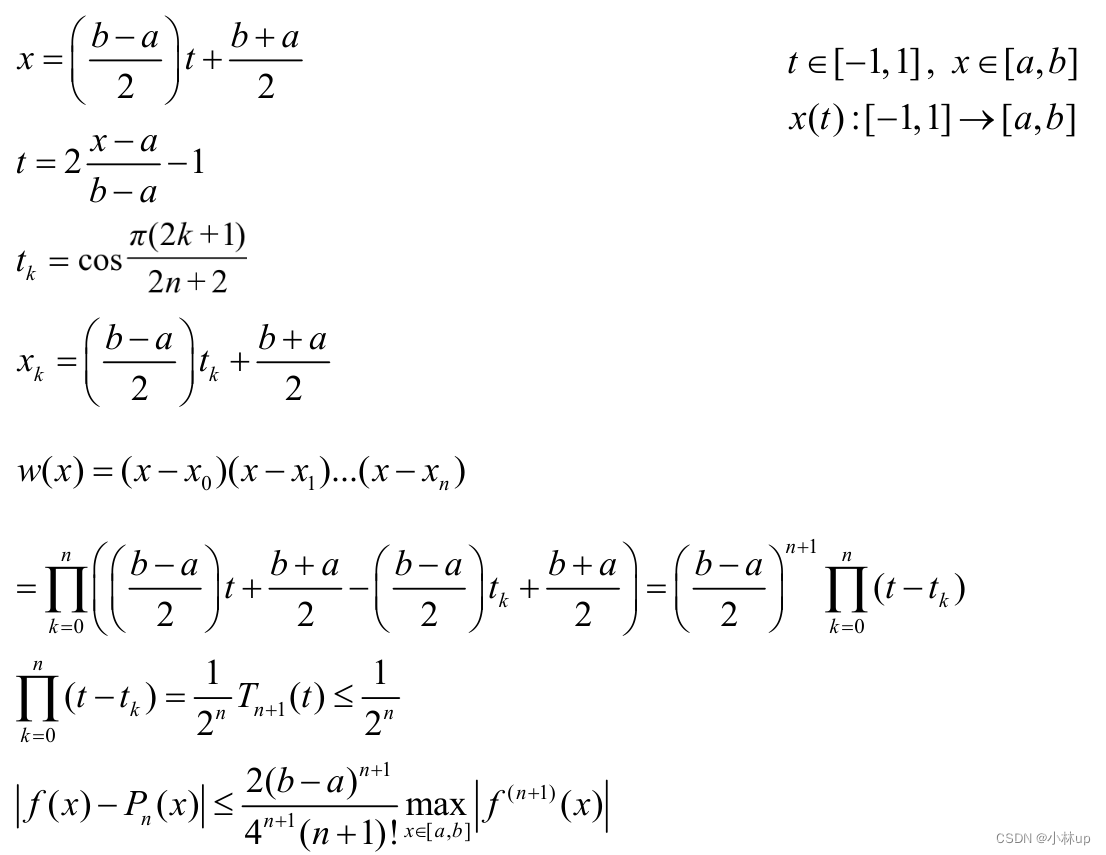
1.4 Chebyshev多项式确定插值点
根据前面的拉格朗日插值我们知道
我们怎么选择最佳的
(
x
0
,
x
1
,
…
,
x
N
)
\left({\left.x_{0}, x_{1}, \ldots, x_{N}\right)}\right.
(x0,x1,…,xN)以最小化
∣
R
(
x
)
∣
|R(x)|
∣R(x)∣呢?
答案是,使用Chebyshev多项式的根。
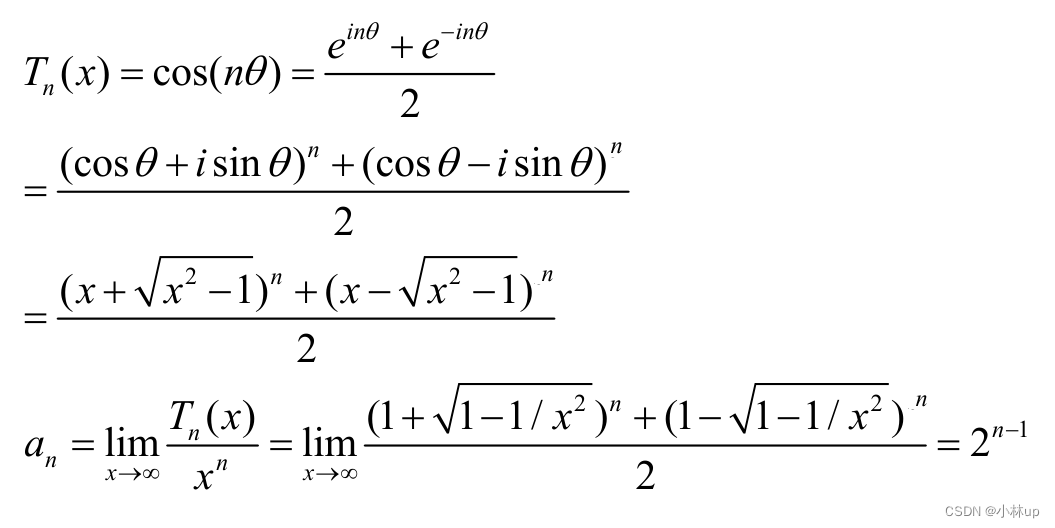
Chebyshev多项式一般表达式:
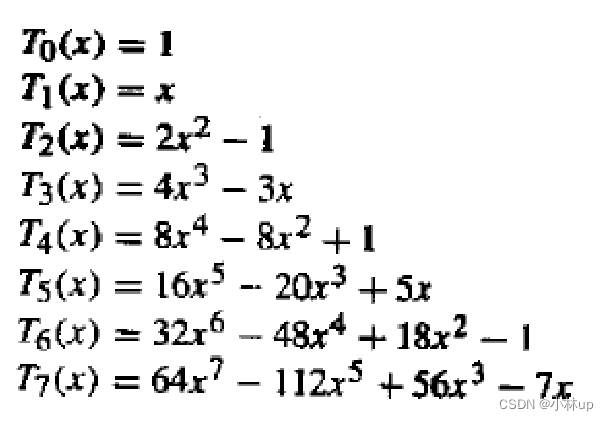
注意
T
n
(
x
)
T_n(x)
Tn(x)最高次项的系数是
2
n
−
1
2^{n-1}
2n−1, 对于
T
n
T_n
Tn有
n
n
n个零点。
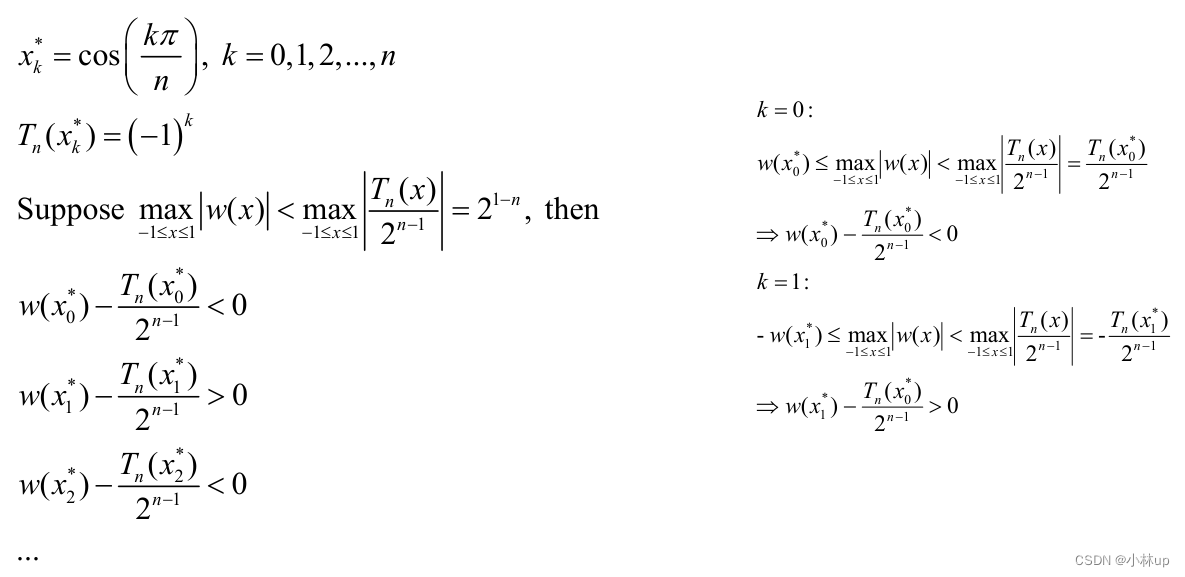
1.4.1 Chebyshev多项式性质
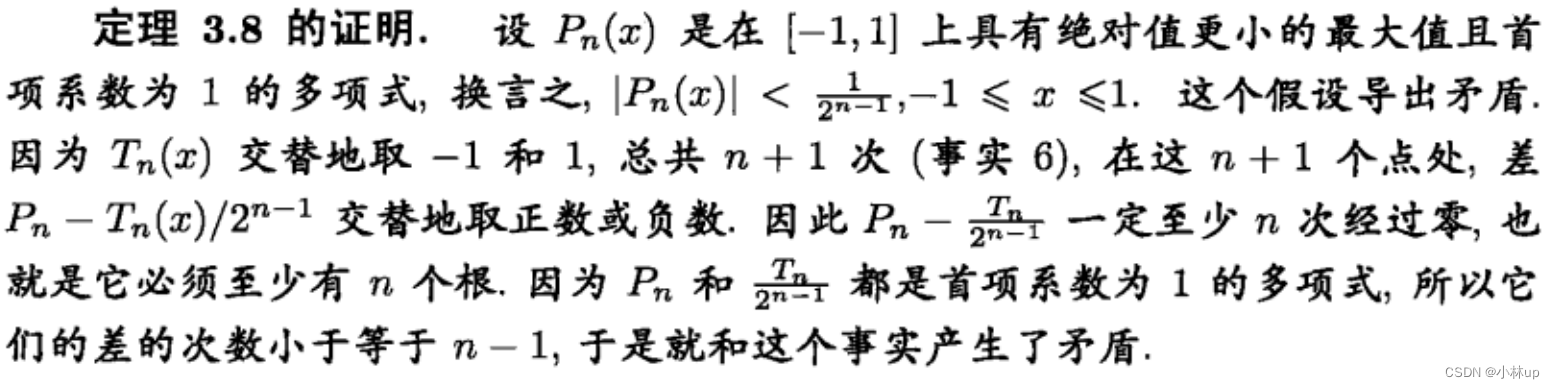
定理:
max − 1 ≤ x ≤ 1 ∣ T n ( x ) 2 n − 1 ∣ ≤ max − 1 ≤ x ≤ 1 ∣ w ( x ) ∣ max − 1 ≤ x ≤ 1 ∣ T n ( x ) 2 n − 1 ∣ = 1 2 n − 1 \begin{aligned} &\max _{-1 \leq x \leq 1}\left|\frac{T_{n}(x)}{2^{n-1}}\right| \leq \max _{-1 \leq x \leq 1}|w(x)| \\ &\max _{-1 \leq x \leq 1}\left|\frac{T_{n}(x)}{2^{n-1}}\right|=\frac{1}{2^{n-1}} \end{aligned} −1≤x≤1max 2n−1Tn(x) ≤−1≤x≤1max∣w(x)∣−1≤x≤1max 2n−1Tn(x) =2n−11
使用反证法证明:
假设 max − 1 ≤ x ≤ 1 ∣ T n ( x ) 2 n − 1 ∣ > max − 1 ≤ x ≤ 1 ∣ w ( x ) ∣ \max _{-1 \leq x \leq 1}\left|\frac{T_{n}(x)}{2^{n-1}}\right| > \max _{-1 \leq x \leq 1}|w(x)| −1≤x≤1max 2n−1Tn(x) >−1≤x≤1max∣w(x)∣
具体证明如下:
对于至少 n − 1 n-1 n−1次多项式(给定了 n + 1 n+1 n+1个点), w ( x ) − T n ( x ) 2 n − 1 w(x)-\frac{T_n{(x)}}{2^{n-1}} w(x)−2n−1Tn(x)有 n n n个根,矛盾。
这是书里摘出的证明
T
n
(
x
)
T_n(x)
Tn(x)最高次项的系数是
2
n
−
1
2^{n-1}
2n−1的证明。
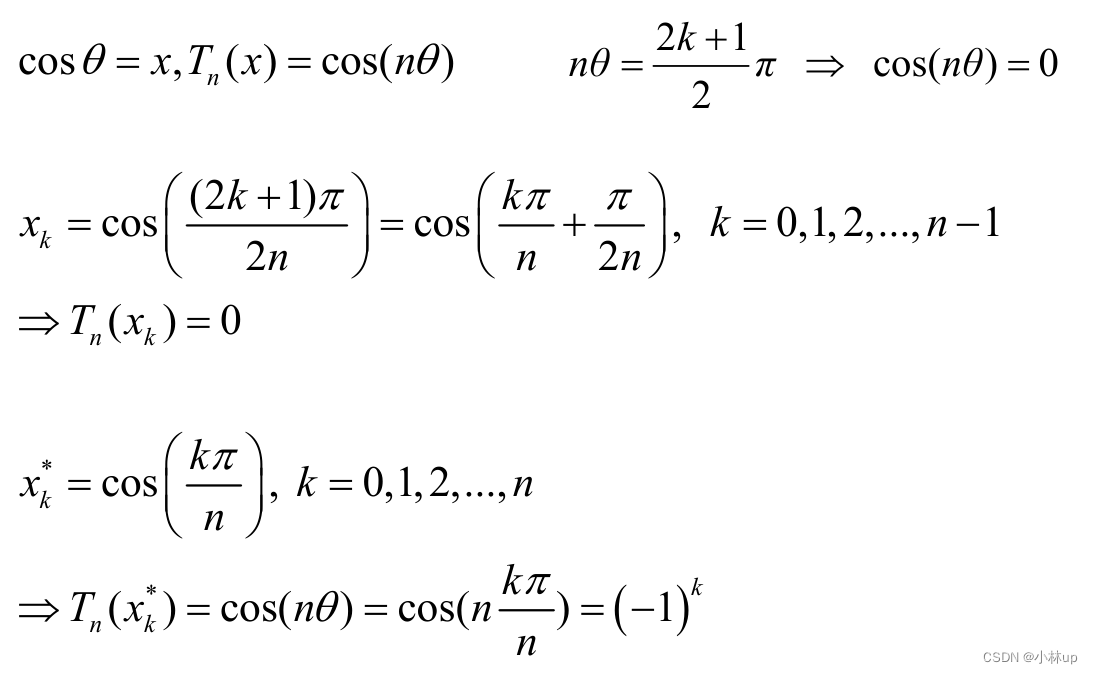
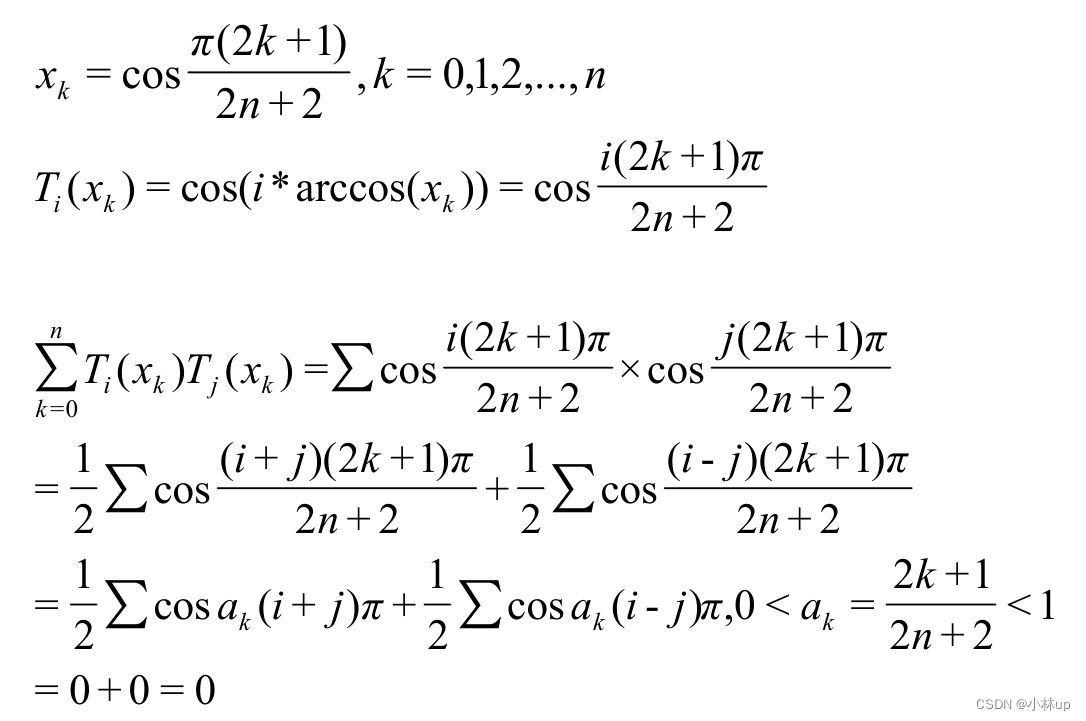
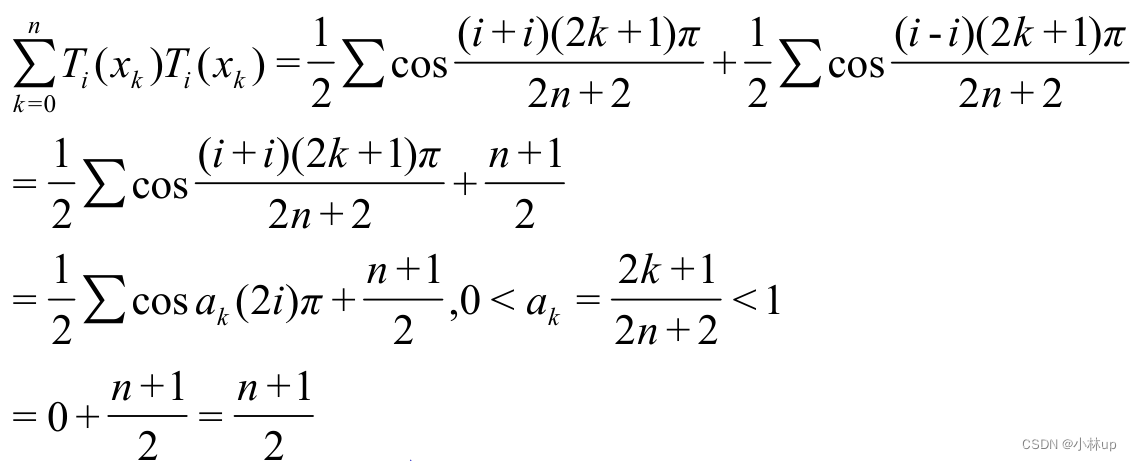
正交性质
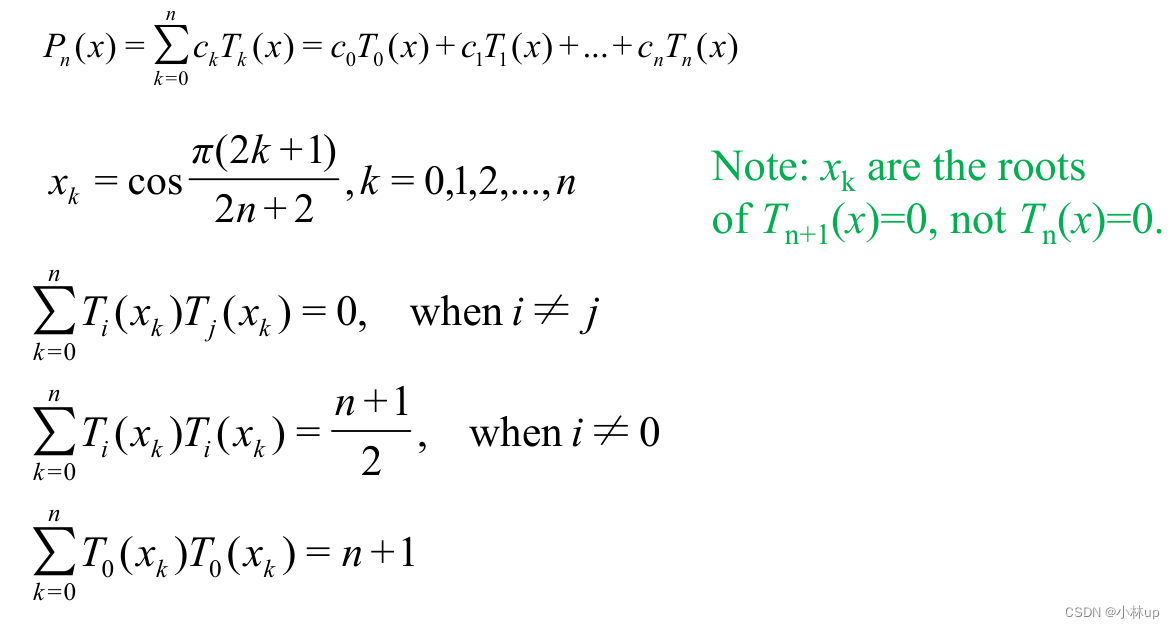
注意
x
k
x_k
xk 是
T
n
+
1
(
x
)
=
0
T_{n+1}(x)=0
Tn+1(x)=0, 不是
T
n
(
x
)
=
0
T_n(x)=0
Tn(x)=0的根.
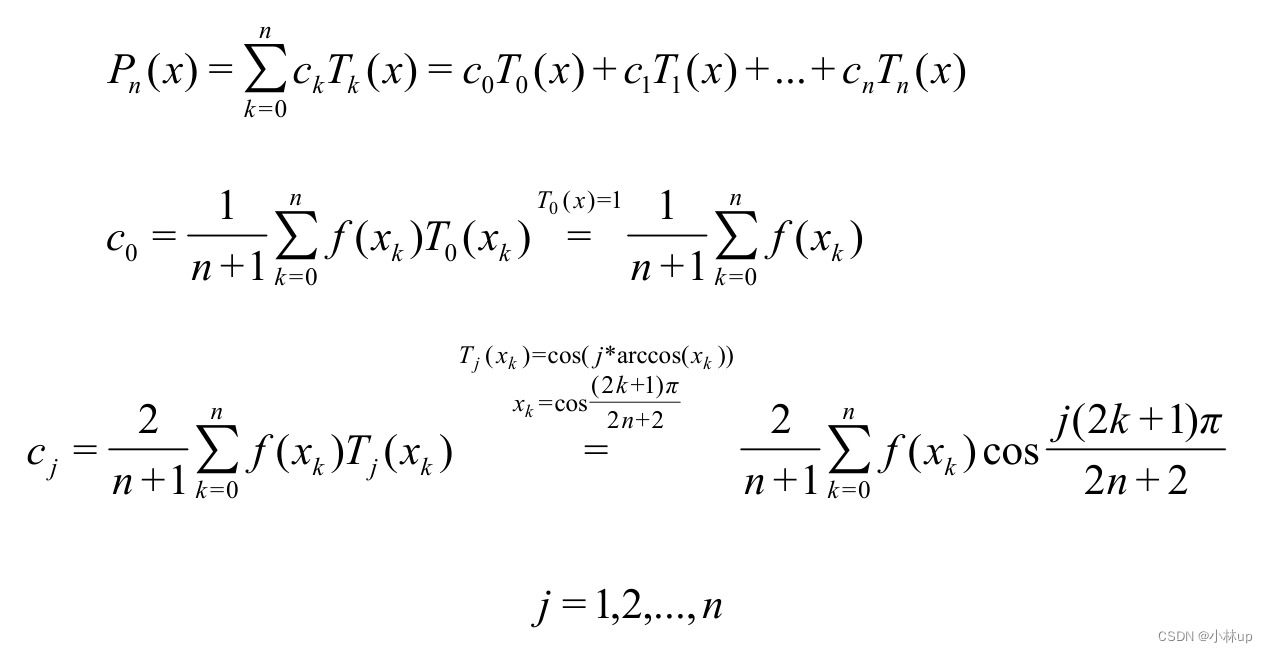
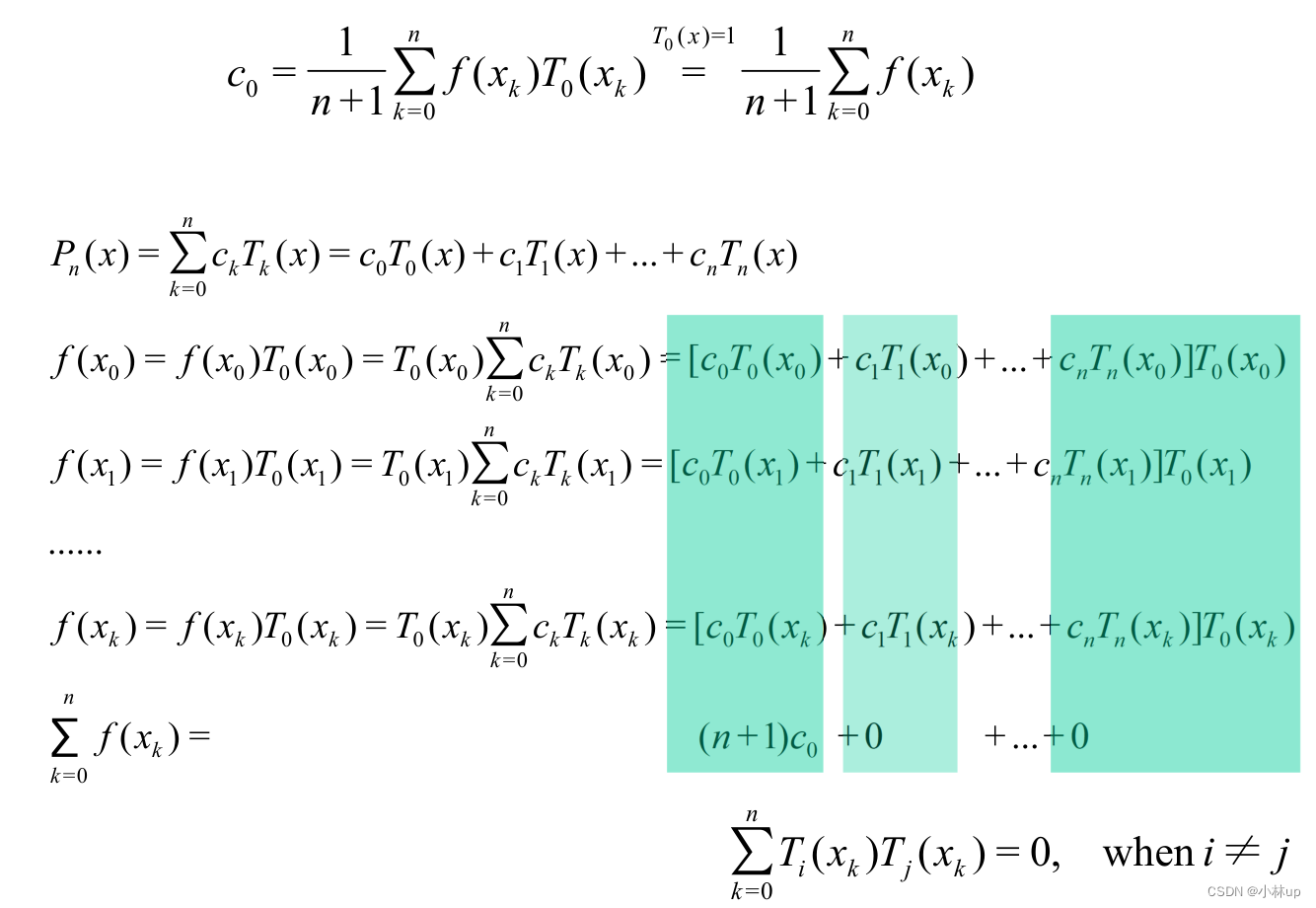
证明:
以下几个图的 f ( x k ) f(x_k) f(xk)和 P n ( x k ) P_n(x_k) Pn(xk)是一个意思
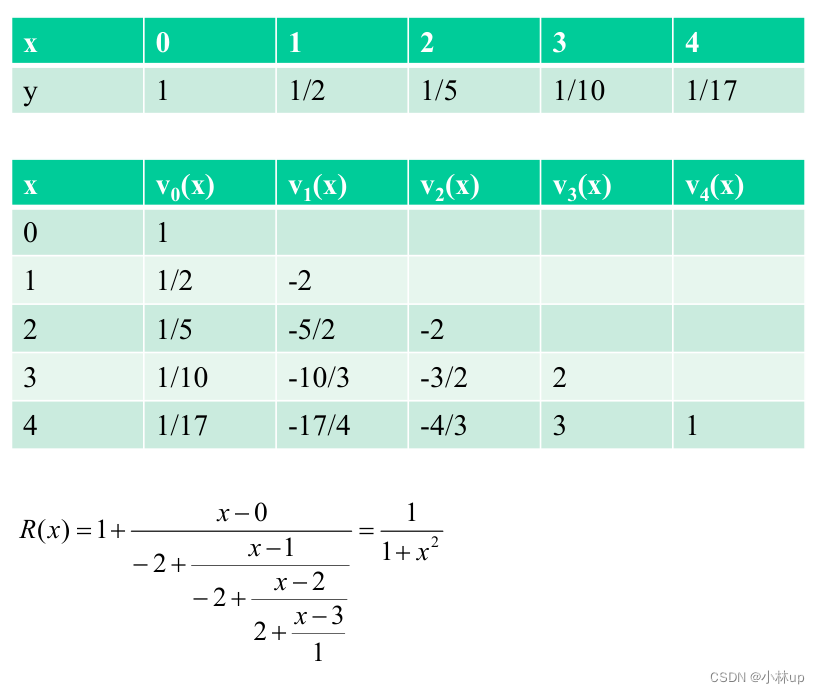
1.5 有理插值
其中
例子:
1.5.1 有理插值误差分析
E ( x ) = f ( x ) − P ( x ) Q ( x ) = ( x − x 0 ) … ( x − x m + n ) ( m + n + 1 ) ! Q 2 ( x ) [ f ( x ) Q 2 ( x ) ] x = ξ ( m + n + 1 ) E(x)=f(x)-\frac{P(x)}{Q(x)}=\frac{\left(x-x_{0}\right) \ldots\left(x-x_{m+n}\right)}{(m+n+1) ! Q^{2}(x)}\left[f(x) Q^{2}(x)\right]_{x=\xi}^{(m+n+1)} E(x)=f(x)−Q(x)P(x)=(m+n+1)!Q2(x)(x−x0)…(x−xm+n)[f(x)Q2(x)]x=ξ(m+n+1)
例子:
1.6 分段插值
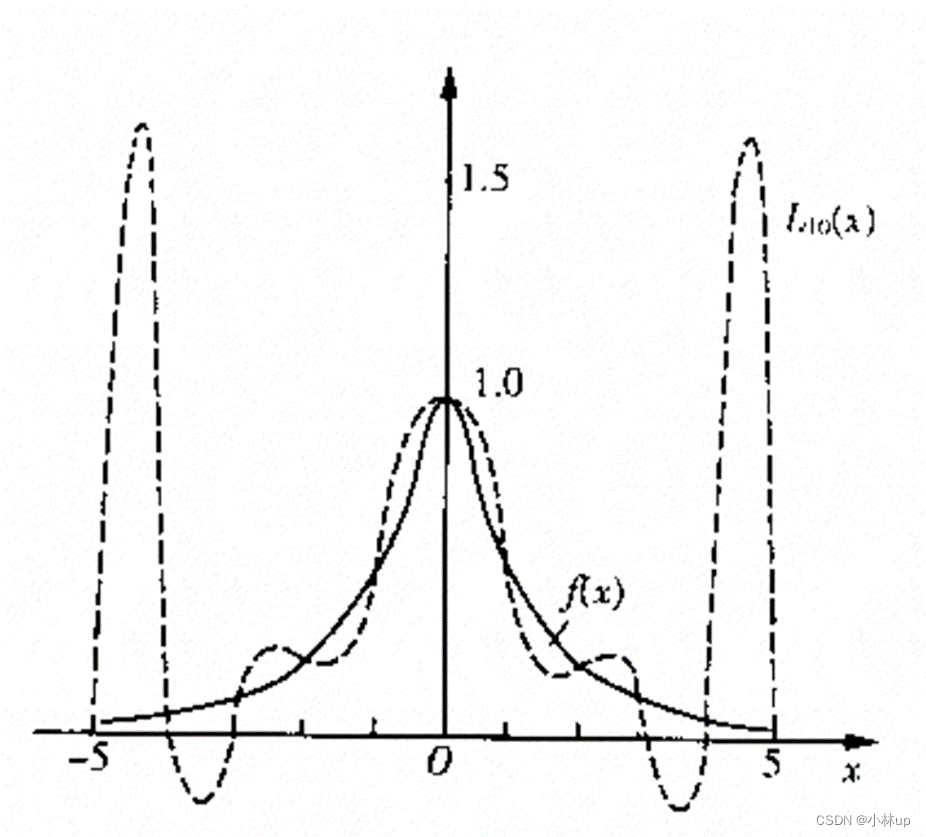
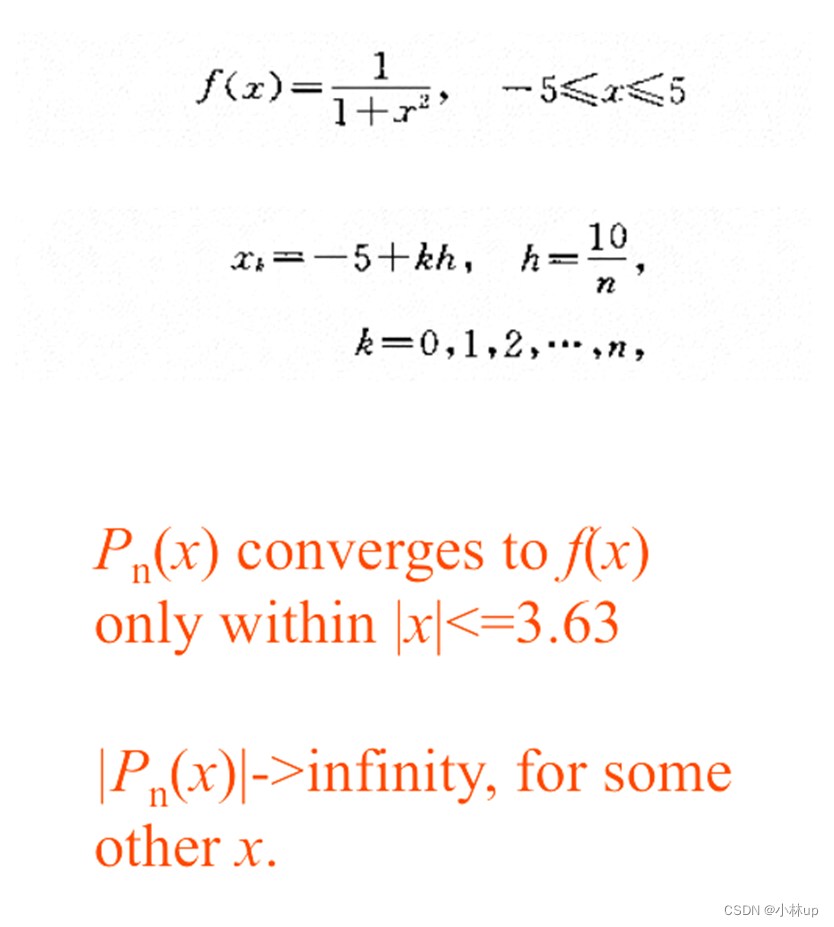
单段拟合会出现Runge现象
1.6.1 分段线性插值
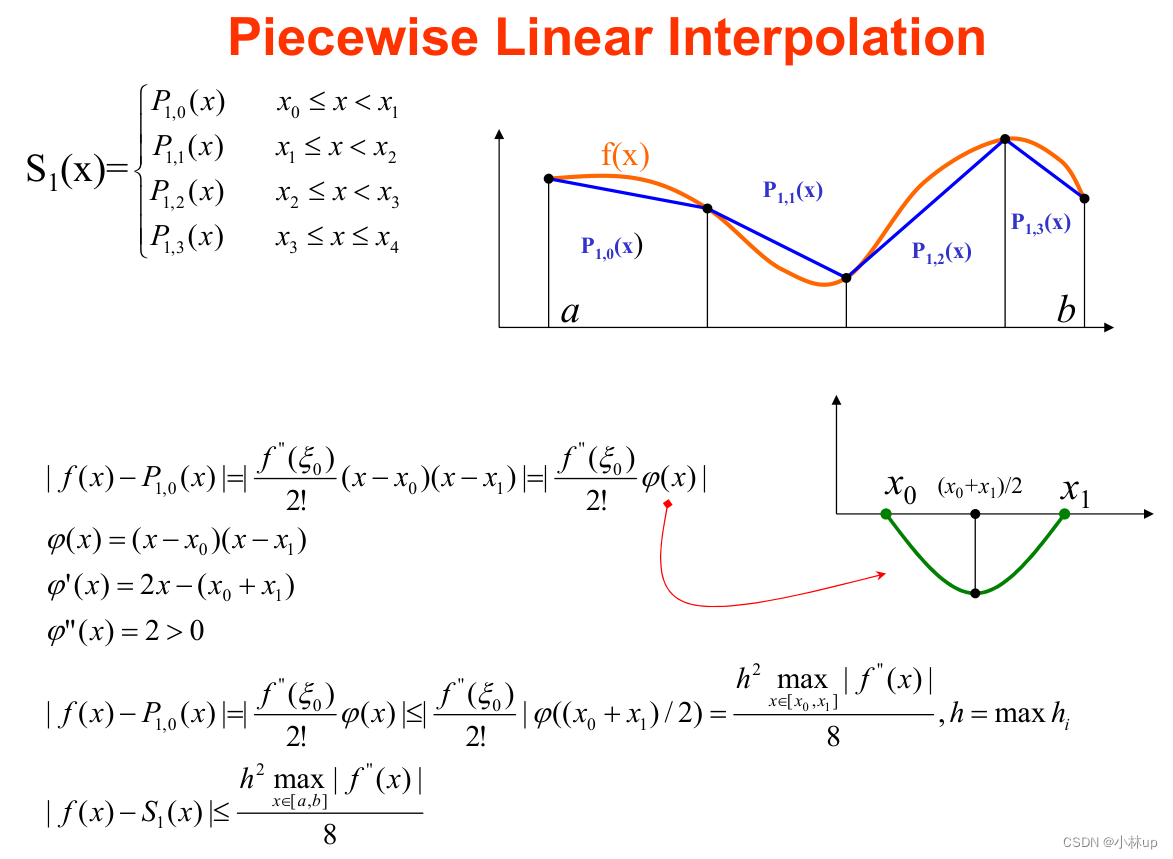
上图的
h
=
x
1
−
x
0
h=x_1-x_0
h=x1−x0
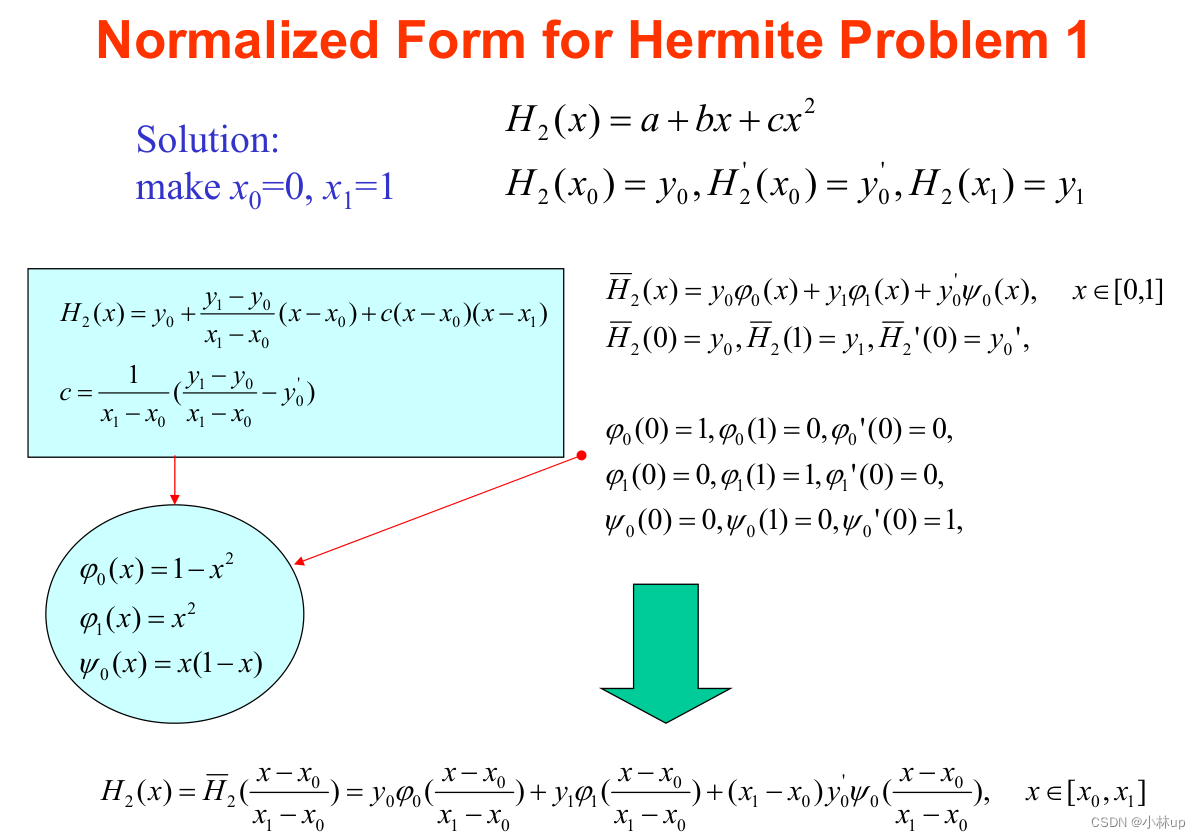
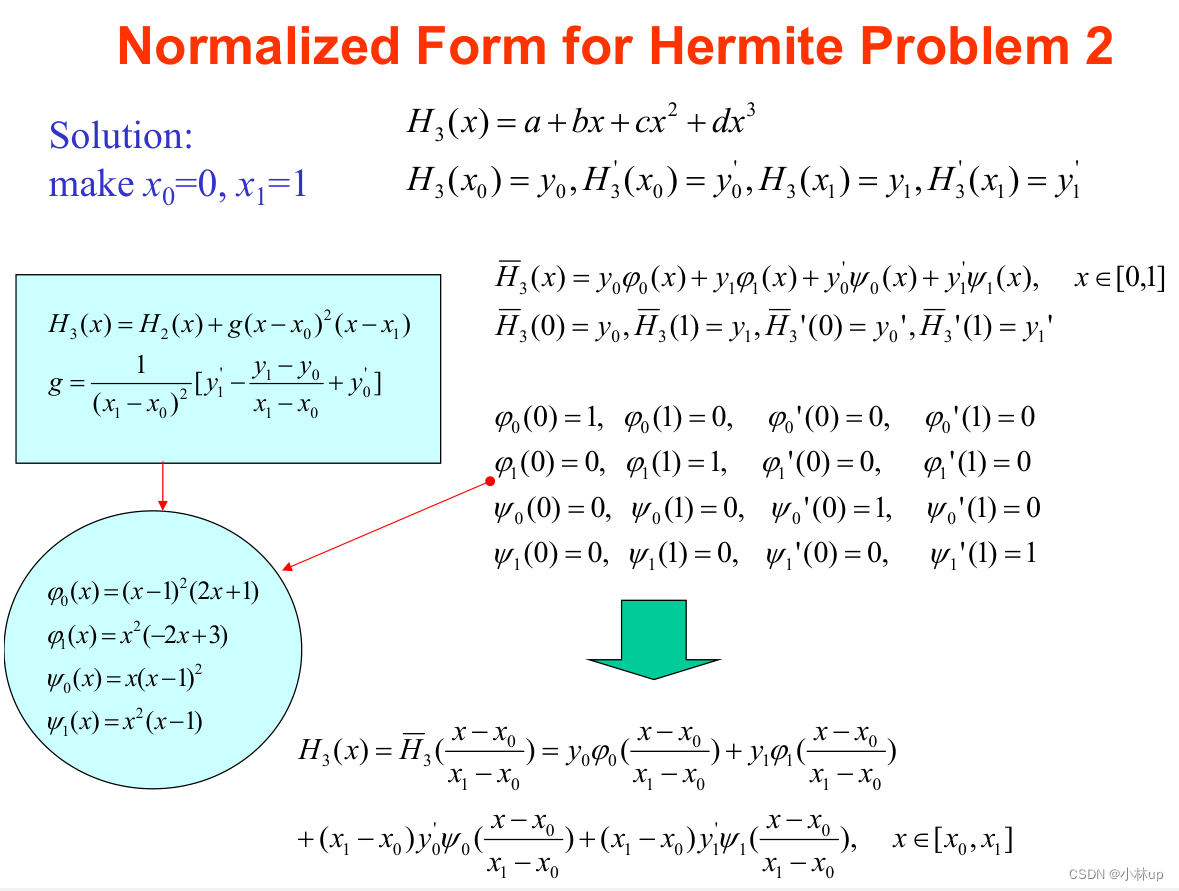
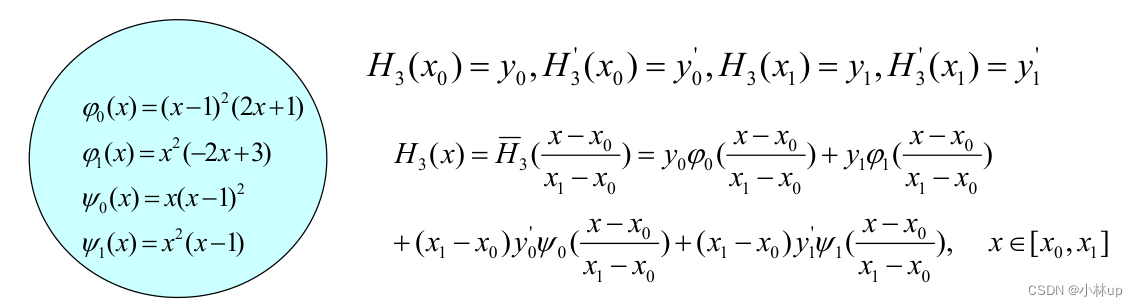
1.6.2 分段Hermite插值
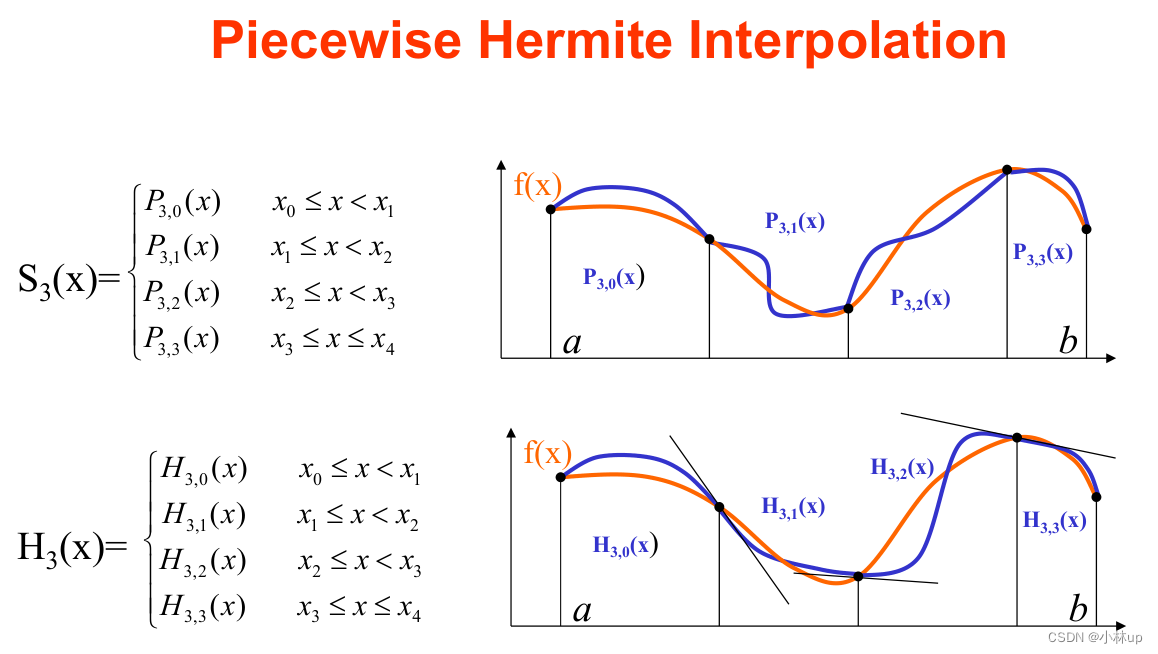
保证拟合曲线导数的光滑性。
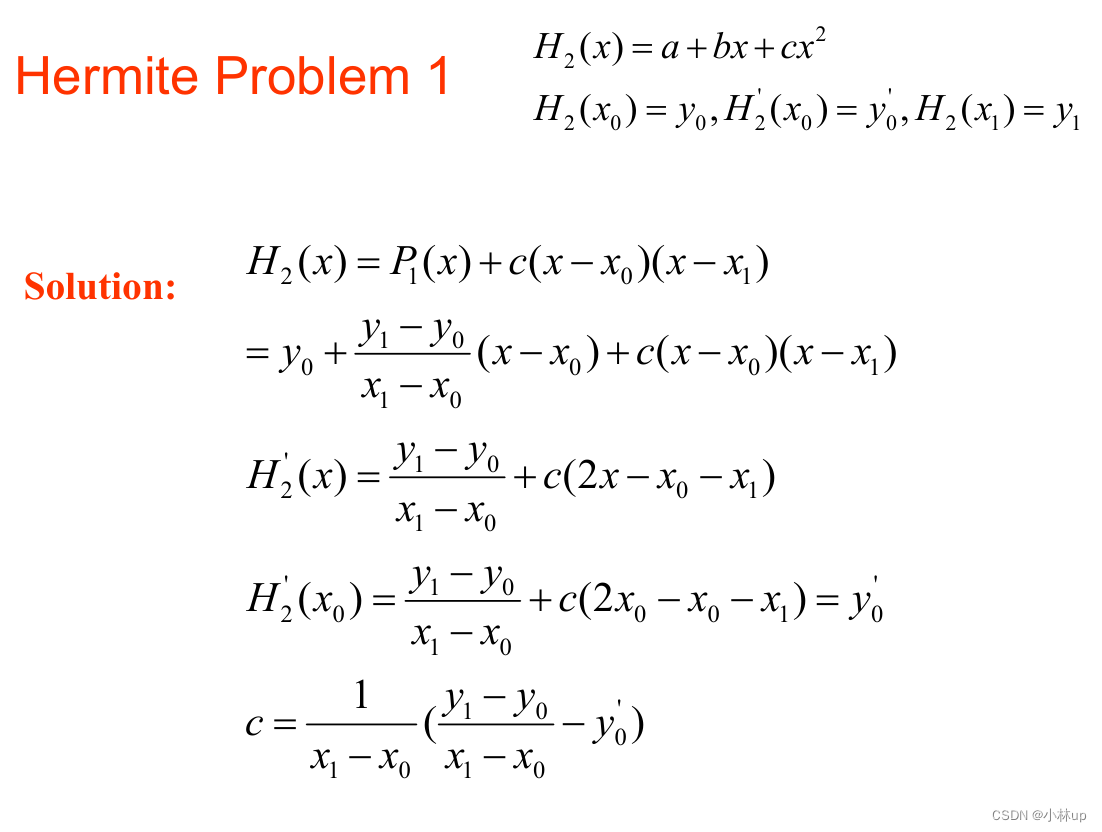
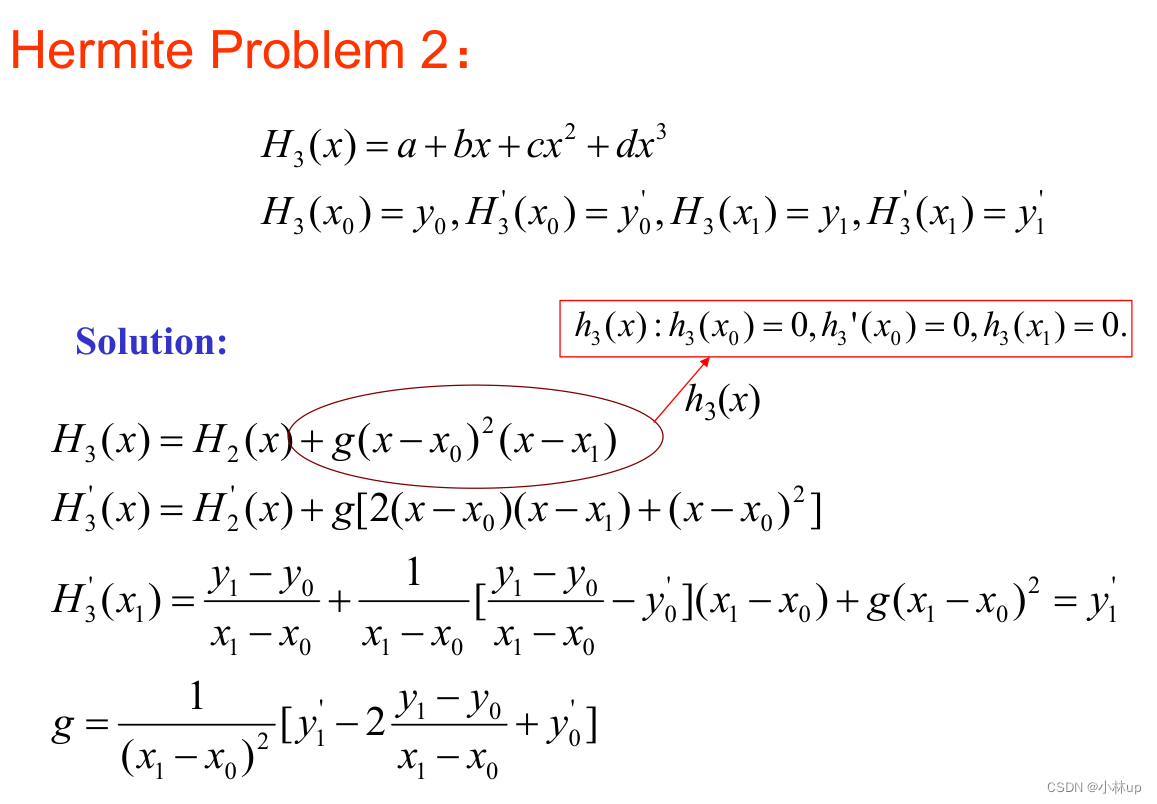
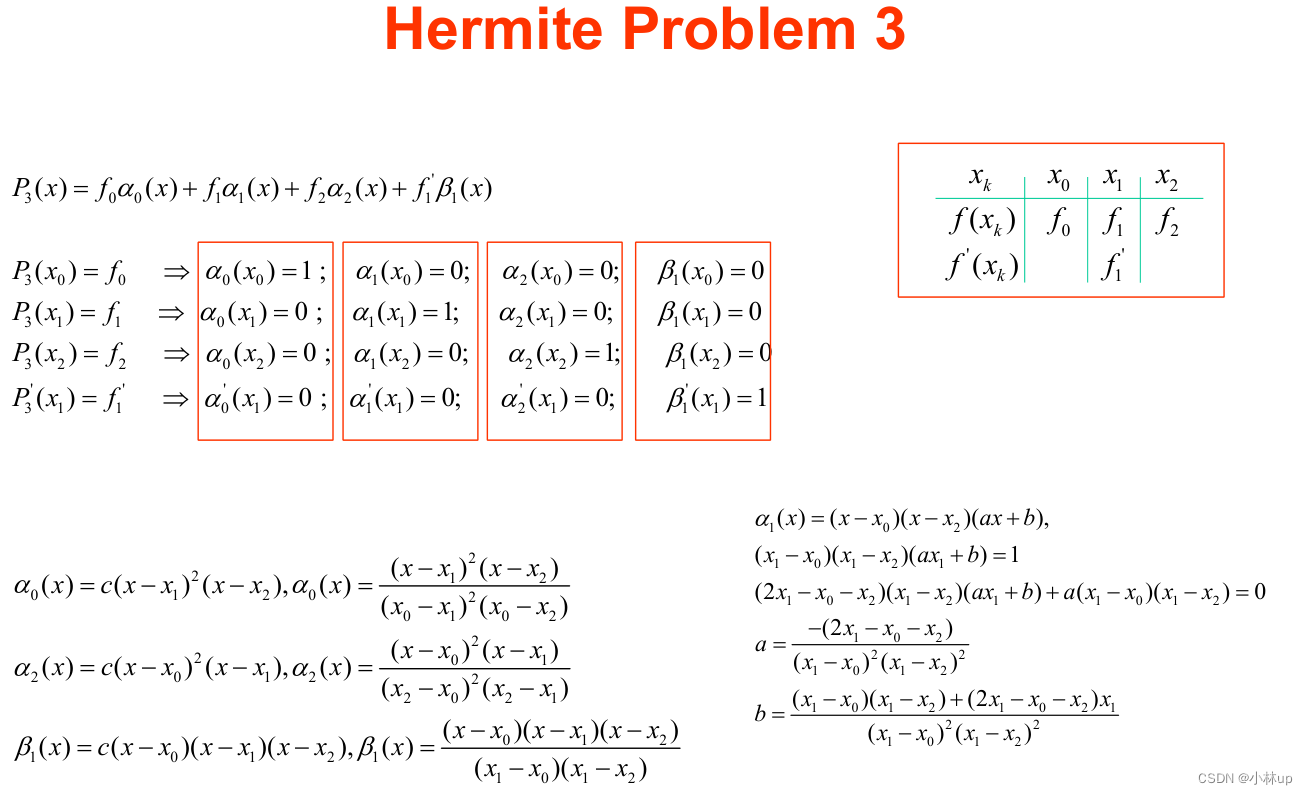
归一化 Hermite Problem 形式
1.6.2.1 Hermite插值误差
对于
H
3
H_3
H3

Hermite赫米特多项式误差介于泰勒级数和拉格朗日之间
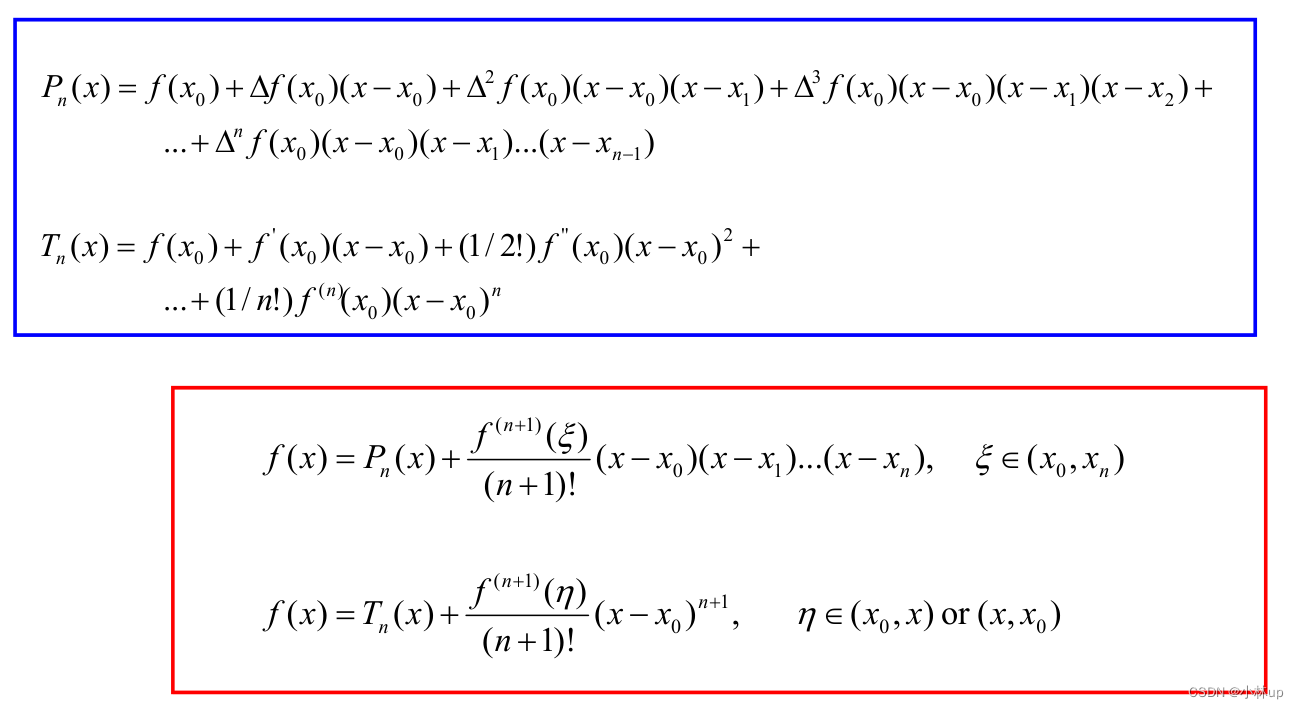
总结
拉格朗日插值和Newton插值形式不同,但是结果是一样的。可以互相转换。把拉格朗日插值和Newton插值和泰勒展式比较一下:
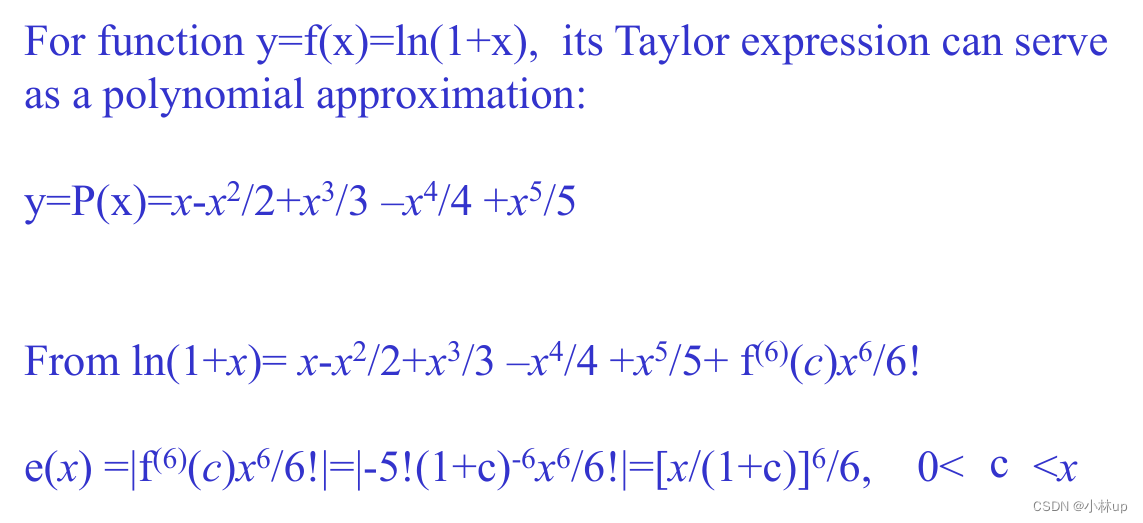
2. 近似
2.1 近似的一些概念
给出一个一般函数 y = f ( x ) y=f(x) y=f(x),求一个多项式函数 y = P ( x ) y=P(x) y=P(x),满足 ∣ f ( x ) − P ( x ) ∣ < ε ( x ) |f(x)-P(x)|<\varepsilon(x) ∣f(x)−P(x)∣<ε(x)
例子:
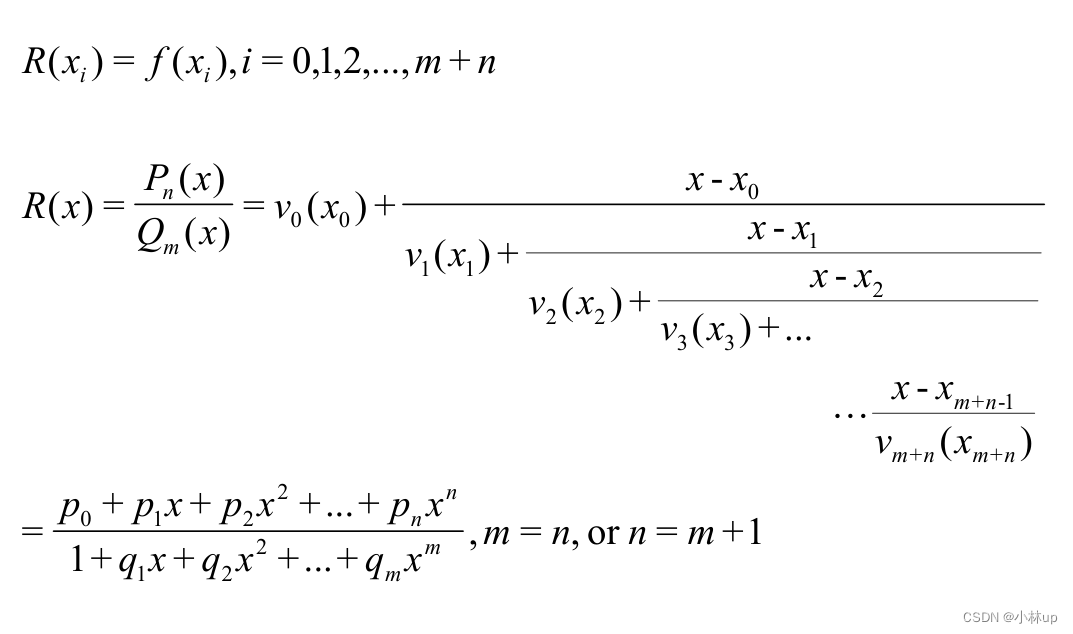
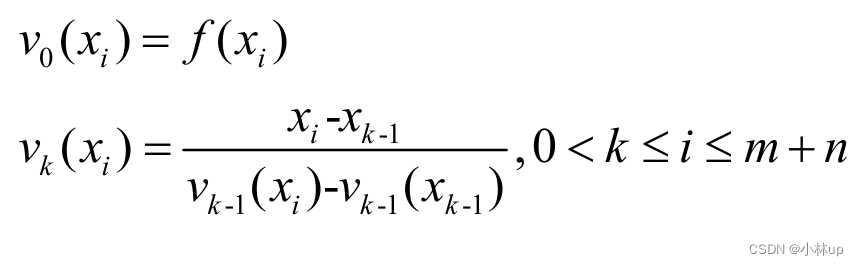
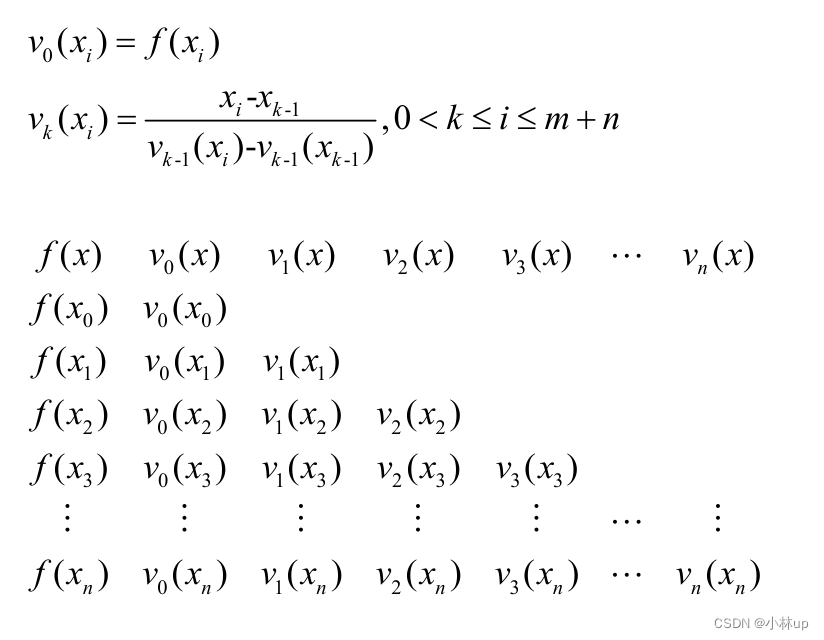
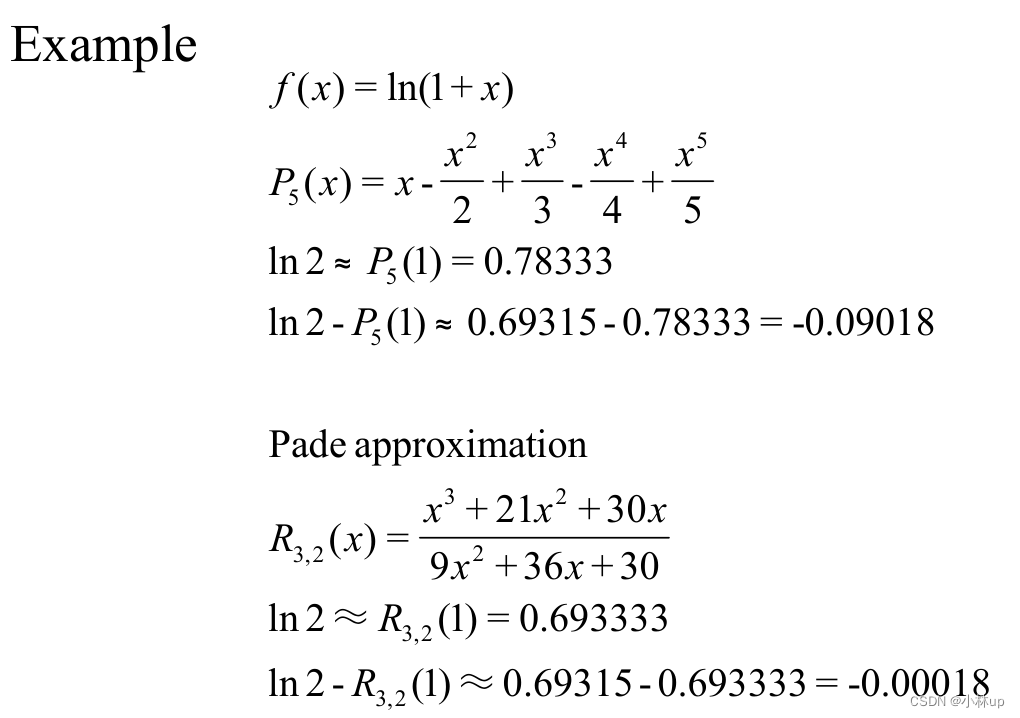
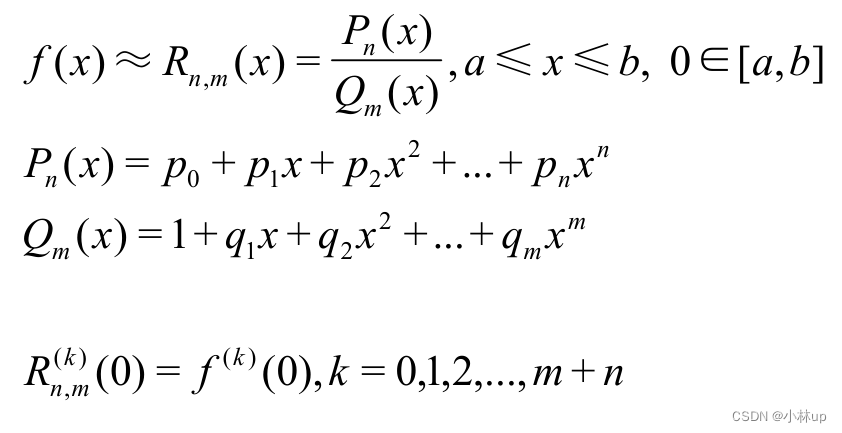
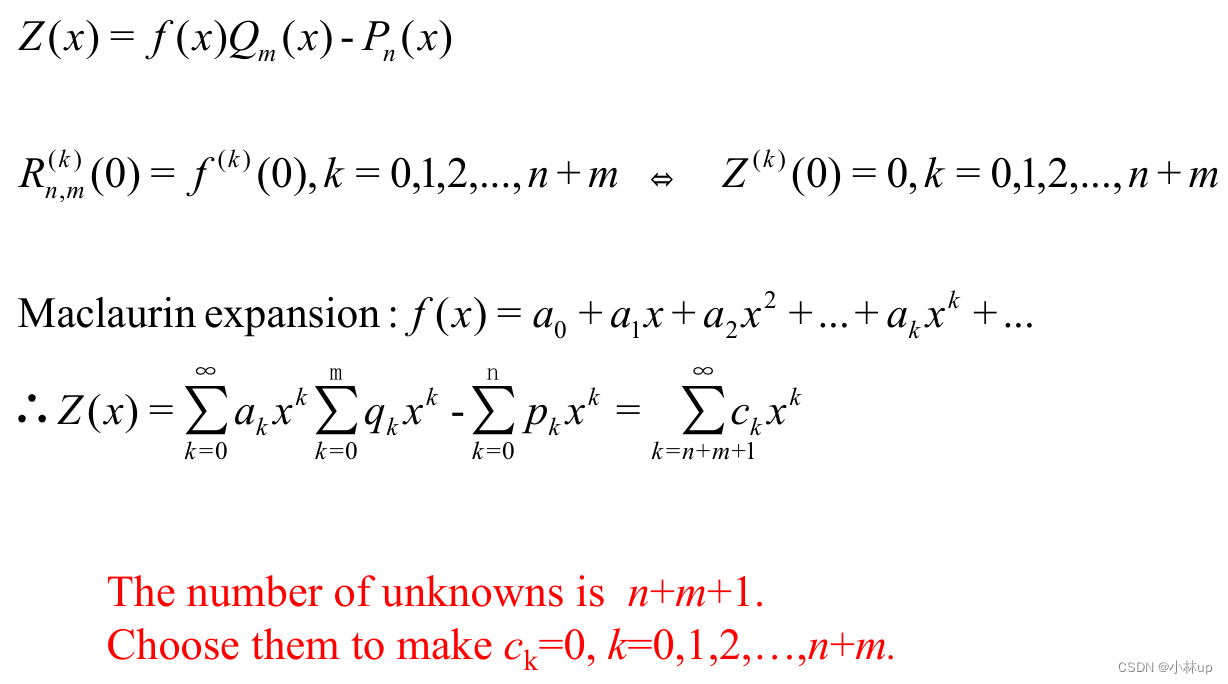
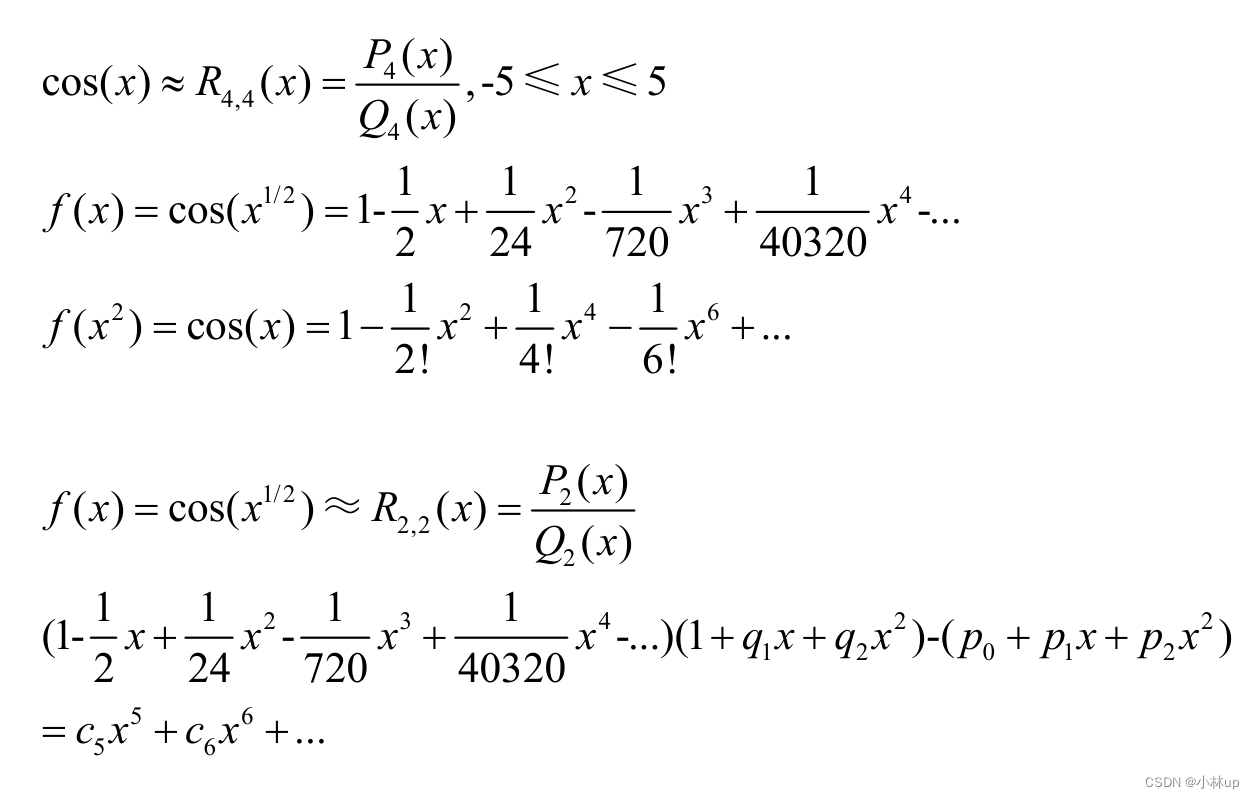
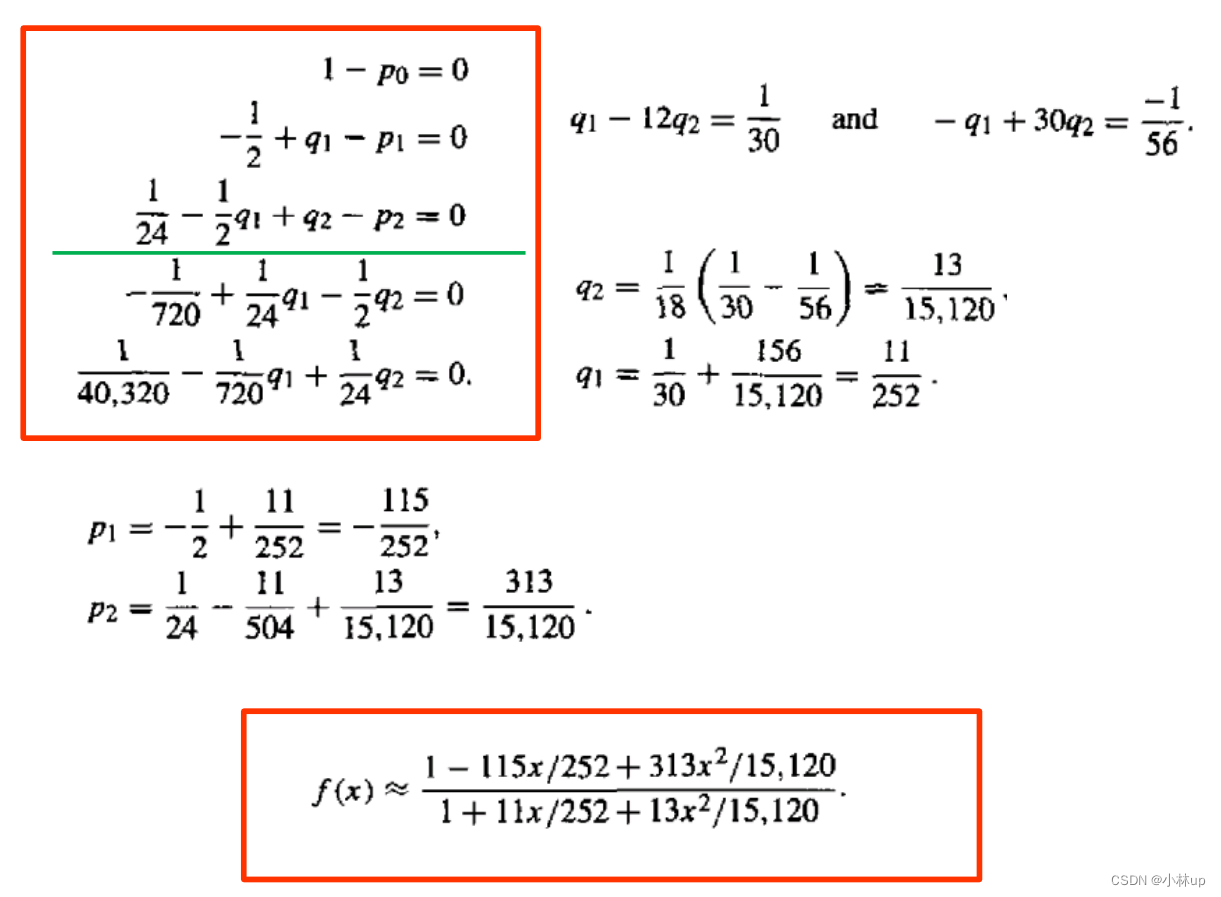
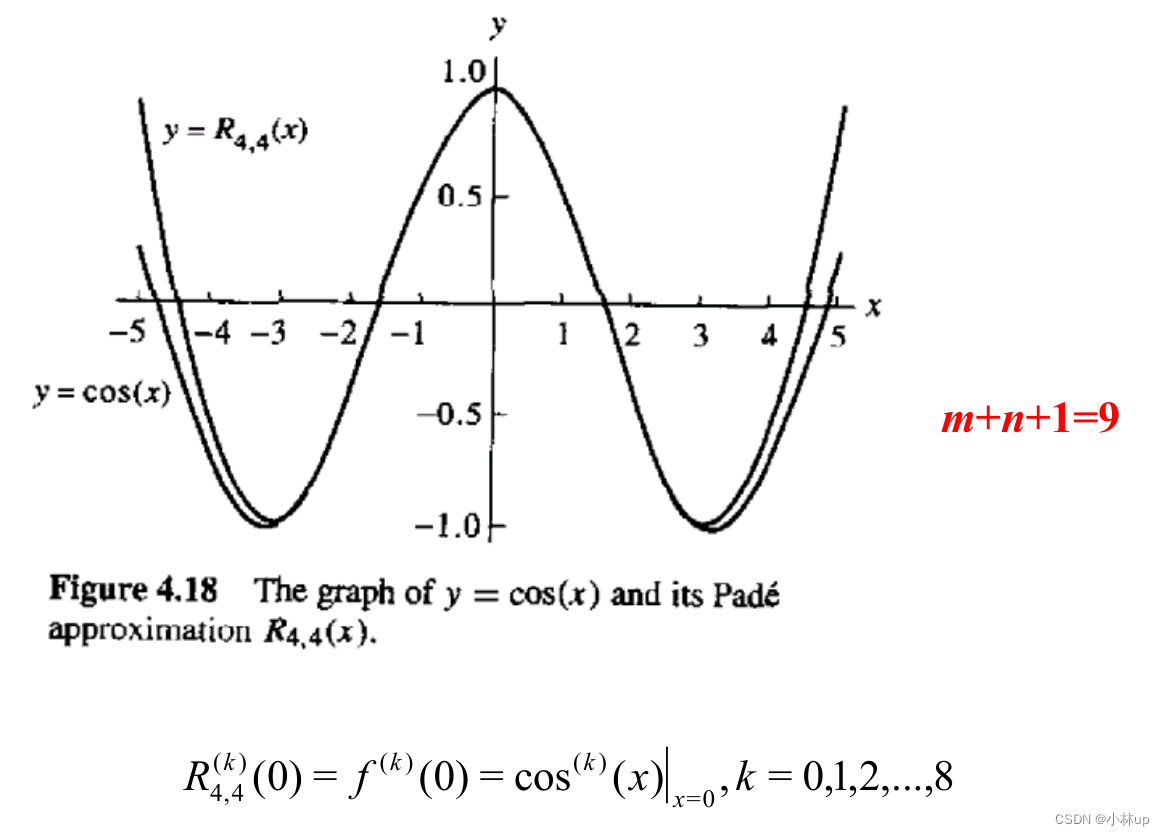
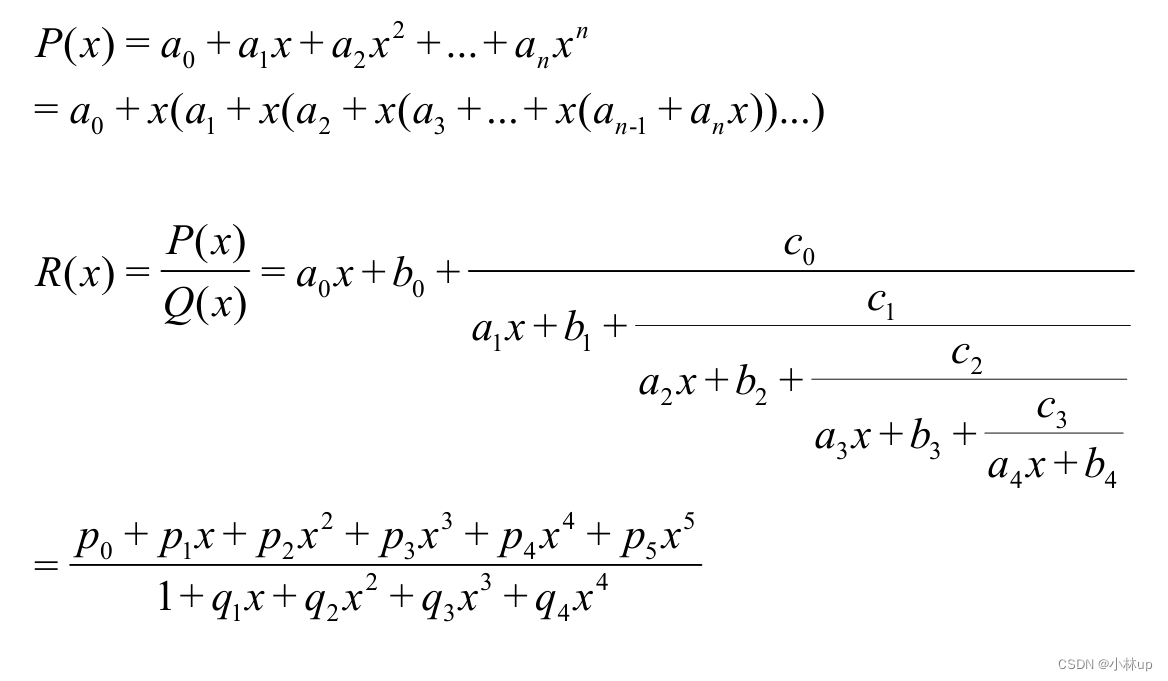
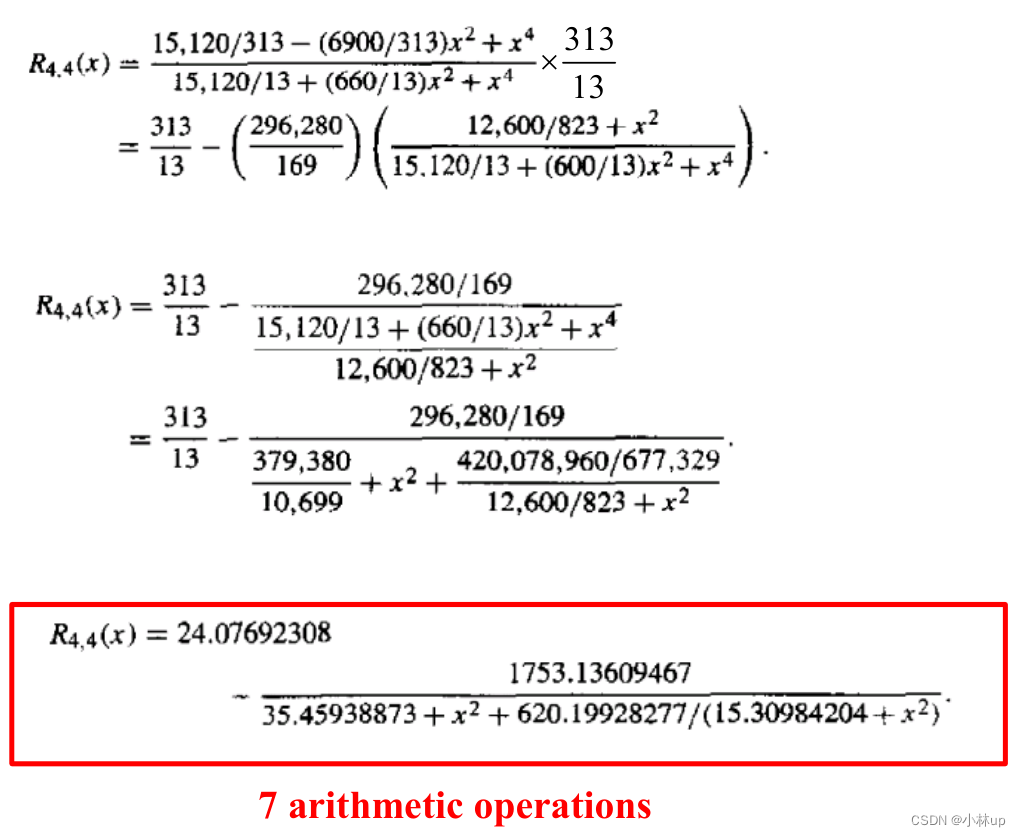
2.2 帕德近似 (有理近似)
R n , m ( x ) = P n ( x ) Q m ( x ) P n ( x ) = p 0 + p 1 x + p 2 x 2 + … + p n x n Q m ( x ) = 1 + q 1 x + q 2 x 2 + … + q m x m \begin{aligned} &R_{n, m}(x) = \frac{P_{n}(x)}{Q_{m}(x)} \\ &P_{n}(x) = p_{0}+p_{1} x+p_{2} x^{2}+\ldots+p_{n} x^{n} \\ &Q_{m}(x) = 1+q_{1} x+q_{2} x^{2}+\ldots+q_{m} x^{m} \end{aligned} Rn,m(x)=Qm(x)Pn(x)Pn(x)=p0+p1x+p2x2+…+pnxnQm(x)=1+q1x+q2x2+…+qmxm
共有
n
+
m
n+m
n+m个未知数。
给定
n
+
m
n+m
n+m的大小,当
n
=
m
n=m
n=m或
n
=
m
+
1
n=m+1
n=m+1近似误差最小。
例子:
连续形式:
3. 拟合
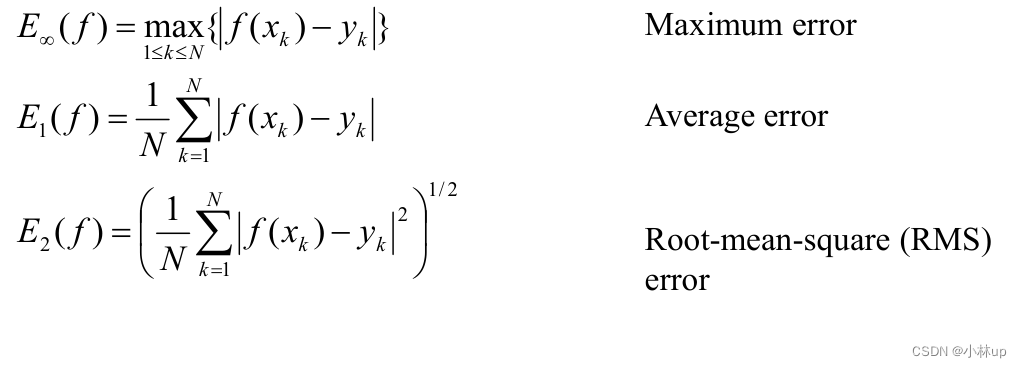
拟合:问题:给定一个曲线类型和一组点,在该类型的曲线中找出一条与这些点距离最小的曲线。
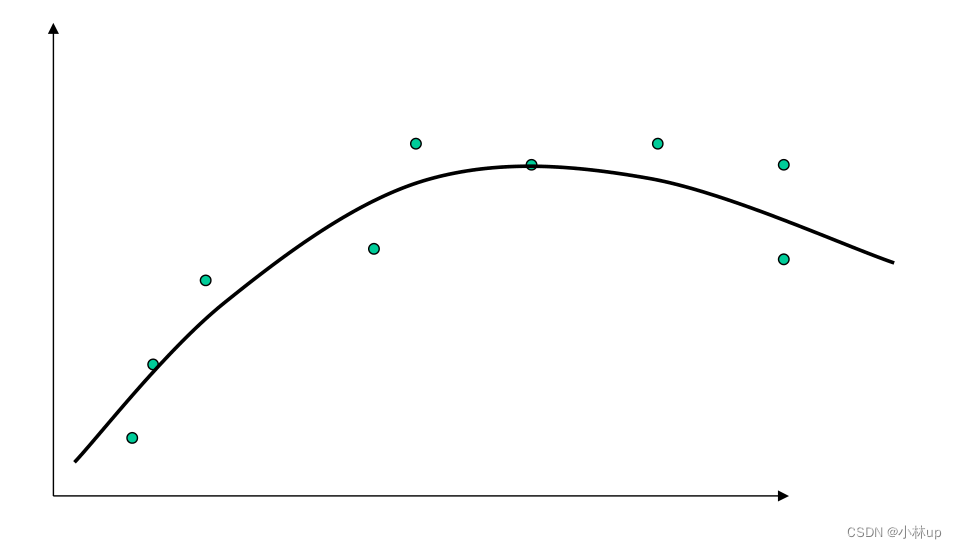
问题:如何评估误差?
有以下几种形式
3.1 最小二乘拟合
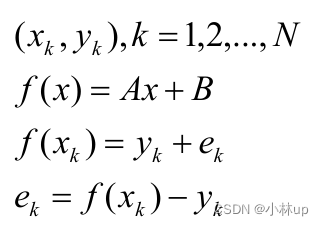
3.1.1 线性拟合
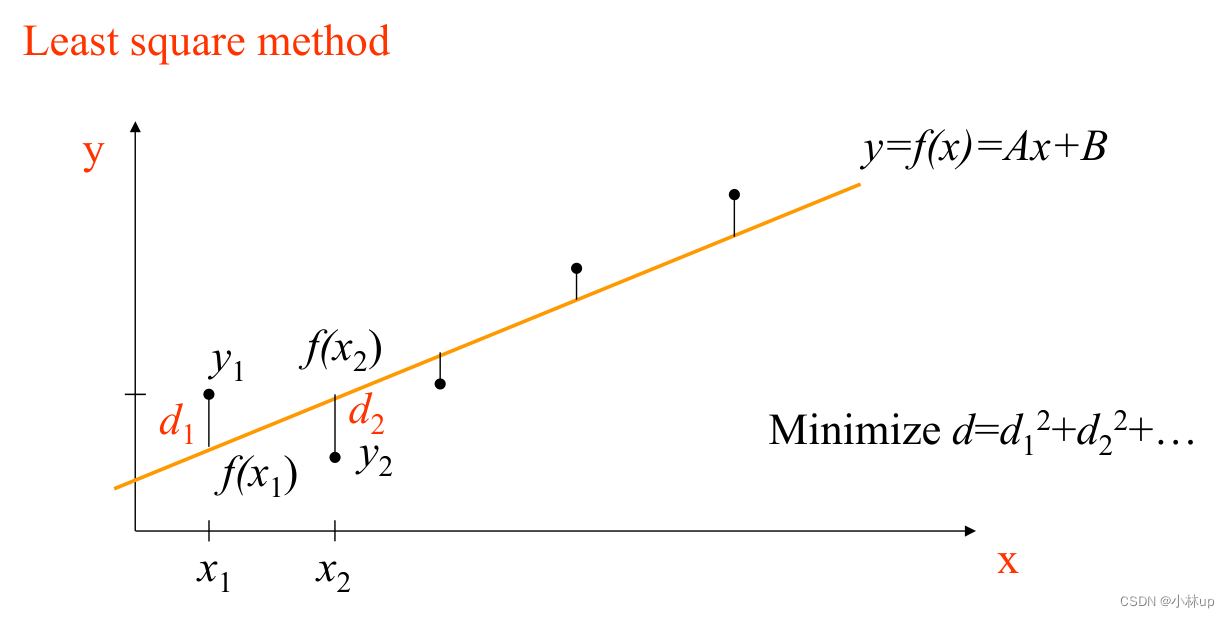
拟合类型:
y
=
f
(
x
)
=
A
x
+
B
y=f(x)={A} x+{B}
y=f(x)=Ax+B
给定点:
(
x
i
,
y
i
)
,
i
=
1
,
2
,
…
,
n
\left(x_{\mathrm{i}}, y_{\mathrm{i}}\right), i=1,2, \ldots, n
(xi,yi),i=1,2,…,n
使用最小二乘法
d ( A , B ) = ∑ i = 1 n [ f ( x i ) − y i ] 2 = ∑ i = 1 n [ A x i + B − y i ] 2 = ∑ i = 1 n [ A 2 x i 2 + B 2 + y i 2 + 2 A B x i − 2 A x i y i − 2 B y i ] = ( ∑ i = 1 n x i 2 ) A 2 + n B 2 + ( 2 ∑ i = 1 n x i ) A B − 2 ( ∑ i = 1 n x i y i ) A − 2 ( ∑ i = 1 n y i ) B + ( ∑ i = 1 n y i 2 ) \begin{aligned} d(A, B) &= \sum_{i = 1}^{n}\left[f\left(x_{i}\right)-y_{i}\right]^{2} = \sum_{i = 1}^{n}\left[A x_{i}+B-y_{i}\right]^{2} \\ &= \sum_{i = 1}^{n}\left[A^{2} x_{i}^{2}+B^{2}+y_{i}^{2}+2 A B x_{i}-2 A x_{i} y_{i}-2 B y_{i}\right] \\ & = \left(\sum_{i = 1}^{n} x_{i}^{2}\right) A^{2}+n B^{2}+\left(2 \sum_{i = 1}^{n} x_{i}\right) A B-2\left(\sum_{i = 1}^{n} x_{i} y_{i}\right) A-2\left(\sum_{i = 1}^{n} y_{i}\right) B+\left(\sum_{i = 1}^{n} y_{i}^{2}\right) \end{aligned} d(A,B)=i=1∑n[f(xi)−yi]2=i=1∑n[Axi+B−yi]2=i=1∑n[A2xi2+B2+yi2+2ABxi−2Axiyi−2Byi]=(i=1∑nxi2)A2+nB2+(2i=1∑nxi)AB−2(i=1∑nxiyi)A−2(i=1∑nyi)B+(i=1∑nyi2)
∂ d ( A , B ) ∂ A = 2 ( ∑ i = 1 n x i 2 ) A + 2 ( ∑ i = 1 n x i ) B − 2 ∑ i = 1 n x i y i = 0 ∂ d ( A , B ) ∂ B = 2 n B + 2 ( ∑ i = 1 n x i ) A − 2 ∑ i = 1 n y i = 0 \begin{aligned} \frac{\partial d(A, B)}{\partial A} &= 2\left(\sum_{i = 1}^{n} x_{i}^{2}\right) A+2\left(\sum_{i = 1}^{n} x_{i}\right) B-2 \sum_{i = 1}^{n} x_{i} y_{i} = 0 \\ \frac{\partial d(A, B)}{\partial B} &= 2 n B+2\left(\sum_{i = 1}^{n} x_{i}\right) A-2 \sum_{i = 1}^{n} y_{i} = 0 \end{aligned} ∂A∂d(A,B)∂B∂d(A,B)=2(i=1∑nxi2)A+2(i=1∑nxi)B−2i=1∑nxiyi=0=2nB+2(i=1∑nxi)A−2i=1∑nyi=0
求解上面的线性方程组可以得到 A A A和 B B B。
3.1.2 指数拟合
拟合类型
y
=
f
(
x
)
=
A
x
M
y=f(x)=A x^{M}
y=f(x)=AxM其中
M
M
M是已知的。
给定点:
(
x
i
,
y
i
)
,
i
=
1
,
2
,
…
,
n
\left(x_{\mathrm{i}}, y_{\mathrm{i}}\right), i=1,2, \ldots, n
(xi,yi),i=1,2,…,n
应用最小二乘法:
E
(
A
)
=
∑
i
=
1
n
(
A
x
i
M
−
y
i
)
2
→
min
E
′
(
A
)
=
2
∑
i
=
1
n
[
(
A
x
i
M
−
y
i
)
x
i
M
]
=
2
∑
i
=
1
n
(
A
x
i
2
M
−
x
i
M
y
i
)
=
2
(
∑
i
=
1
n
x
i
2
M
)
A
−
2
∑
i
=
1
n
x
i
M
y
i
=
0
A
=
∑
i
=
1
n
x
i
M
y
i
∑
i
=
1
n
x
i
2
M
\begin{aligned} &E(A) = \sum_{i = 1}^{n}\left(A x_{i}^{M}-y_{i}\right)^{2} \rightarrow \min \\ &E^{\prime}(A) = 2 \sum_{i = 1}^{n}\left[\left(A x_{i}^{M}-y_{i}\right) x_{i}^{M}\right] = 2 \sum_{i = 1}^{n}\left(A x_{i}^{2 M}-x_{i}^{M} y_{i}\right) \\ & = 2\left(\sum_{i = 1}^{n} x_{i}^{2 M}\right) A-2 \sum_{i = 1}^{n} x_{i}^{M} y_{i} = 0 \\ &A = \frac{\sum_{i = 1}^{n} x_{i}^{M} y_{i}}{\sum_{i = 1}^{n} x_{i}^{2 M}} \end{aligned}
E(A)=i=1∑n(AxiM−yi)2→minE′(A)=2i=1∑n[(AxiM−yi)xiM]=2i=1∑n(Axi2M−xiMyi)=2(i=1∑nxi2M)A−2i=1∑nxiMyi=0A=∑i=1nxi2M∑i=1nxiMyi
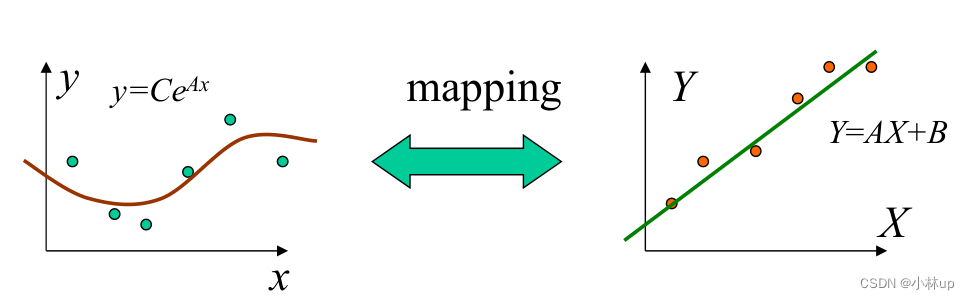
另一种形式的指数拟合:
拟合形式:
y
=
C
e
A
x
y=C e^{A x}
y=CeAx
给定点:
(
x
i
,
y
i
)
,
i
=
1
,
2
,
…
,
n
\left(x_{\mathrm{i}}, y_{\mathrm{i}}\right), i=1,2, \ldots, n
(xi,yi),i=1,2,…,n
应用最小二乘法:
E
(
A
,
C
)
=
∑
i
=
1
n
(
C
e
A
x
i
−
y
i
)
2
→
min
∂
E
∂
A
=
2
∑
i
=
1
n
[
(
C
e
A
x
i
−
y
i
)
C
e
A
x
i
x
i
]
=
2
∑
i
=
1
n
(
C
2
e
2
A
x
i
x
i
−
C
e
A
x
i
x
i
y
i
)
=
0
∂
E
∂
C
=
2
∑
i
=
1
n
[
(
C
e
A
x
i
−
y
i
)
e
A
x
i
]
=
2
∑
i
=
1
n
(
C
e
2
A
x
i
−
e
A
x
i
y
i
)
=
0
\begin{aligned} &E(A, C) = \sum_{i = 1}^{n}\left(C e^{A x_{i}}-y_{i}\right)^{2} \rightarrow \min \\ &\frac{\partial E}{\partial A} = 2 \sum_{i = 1}^{n}\left[\left(C e^{A x_{i}}-y_{i}\right) C e^{A x_{i}} x_{i}\right] = 2 \sum_{i = 1}^{n}\left(C^{2} e^{2 A x_{i}} x_{i}-C e^{A x_{i}} x_{i} y_{i}\right) = 0 \\ &\frac{\partial E}{\partial C} = 2 \sum_{i = 1}^{n}\left[\left(C e^{A x_{i}}-y_{i}\right) e^{A x_{i}}\right] = 2 \sum_{i = 1}^{n}\left(C e^{2 A x_{i}}-e^{A x_{i}} y_{i}\right) = 0 \end{aligned}
E(A,C)=i=1∑n(CeAxi−yi)2→min∂A∂E=2i=1∑n[(CeAxi−yi)CeAxixi]=2i=1∑n(C2e2Axixi−CeAxixiyi)=0∂C∂E=2i=1∑n[(CeAxi−yi)eAxi]=2i=1∑n(Ce2Axi−eAxiyi)=0
这是非线性方程不好解得
A
A
A和
C
C
C。求解有两个思路:一是使用优化的方法比如单纯形法,二是使用Newton法迭代,另外可以考虑线性化:
y
=
C
e
A
x
ln
(
y
)
=
A
x
+
ln
(
C
)
Y
=
A
X
+
B
\begin{aligned} & y = C e^{A x} \\ &\ln (y) = A x+\ln (C) \\ &Y = A X+B \end{aligned}
y=CeAxln(y)=Ax+ln(C)Y=AX+B
其中
Y
=
ln
(
y
)
,
X
=
x
,
B
=
ln
(
C
)
Y=\ln (y), X=x, B=\ln (C)
Y=ln(y),X=x,B=ln(C)
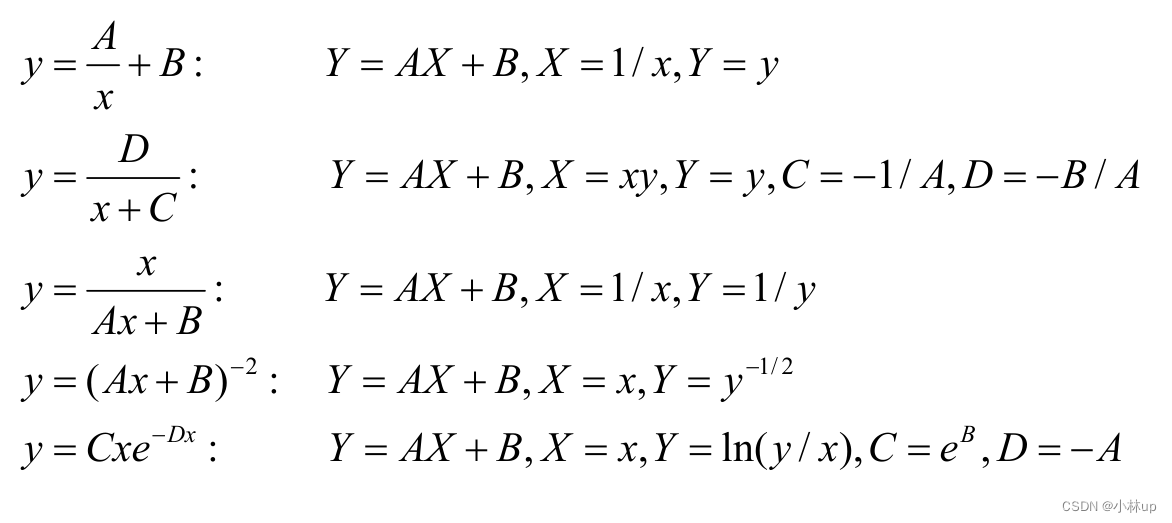
3.1.3 其他形式拟合(线性化思想)
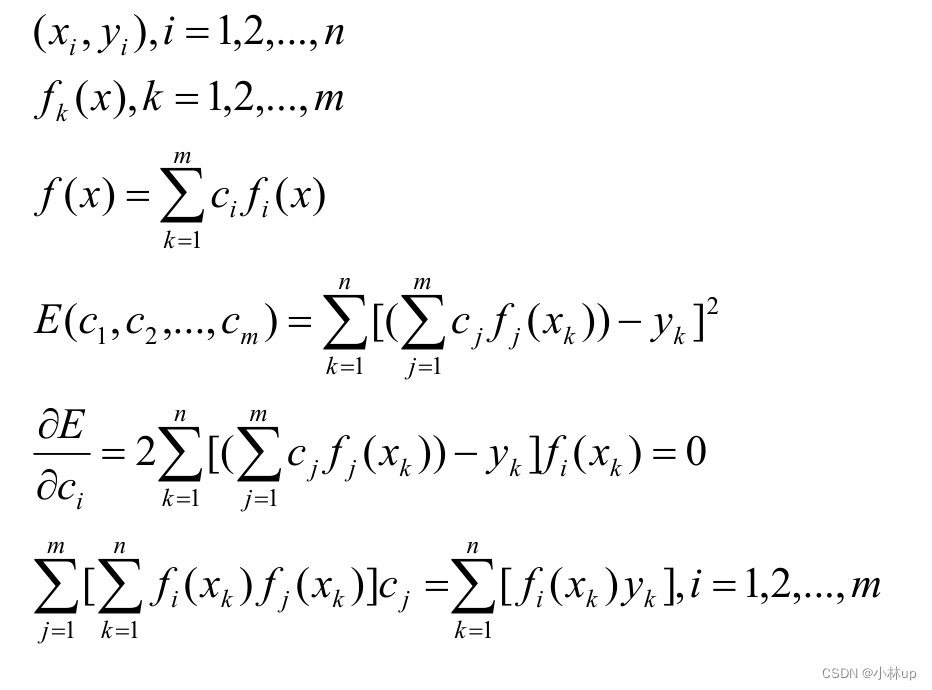
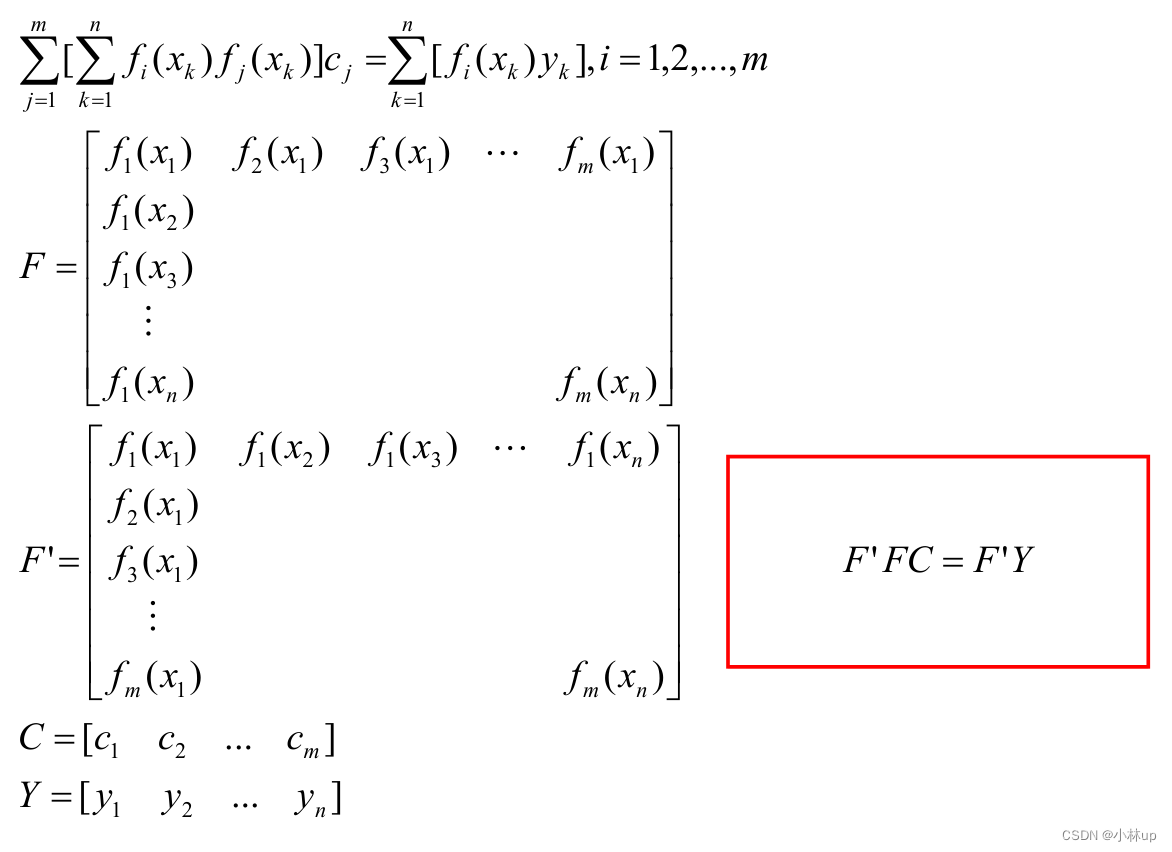
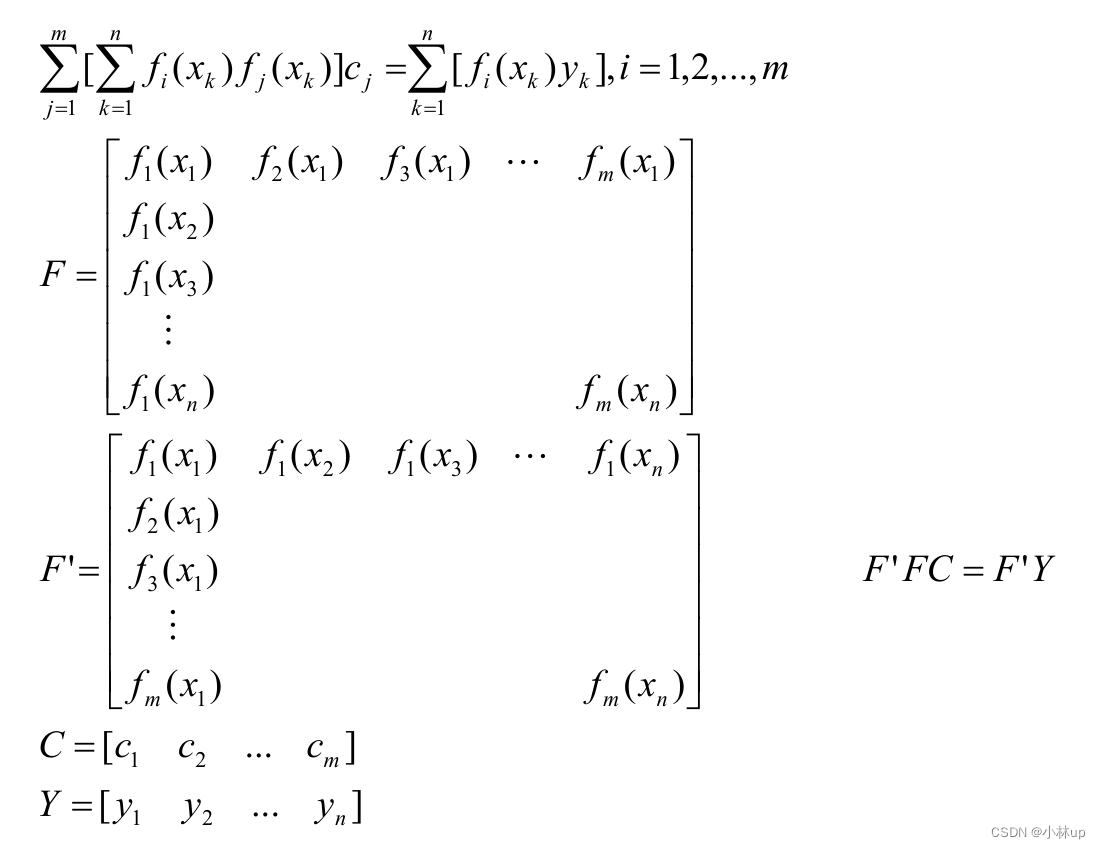
3.1.4 一般线性最小二乘法形式
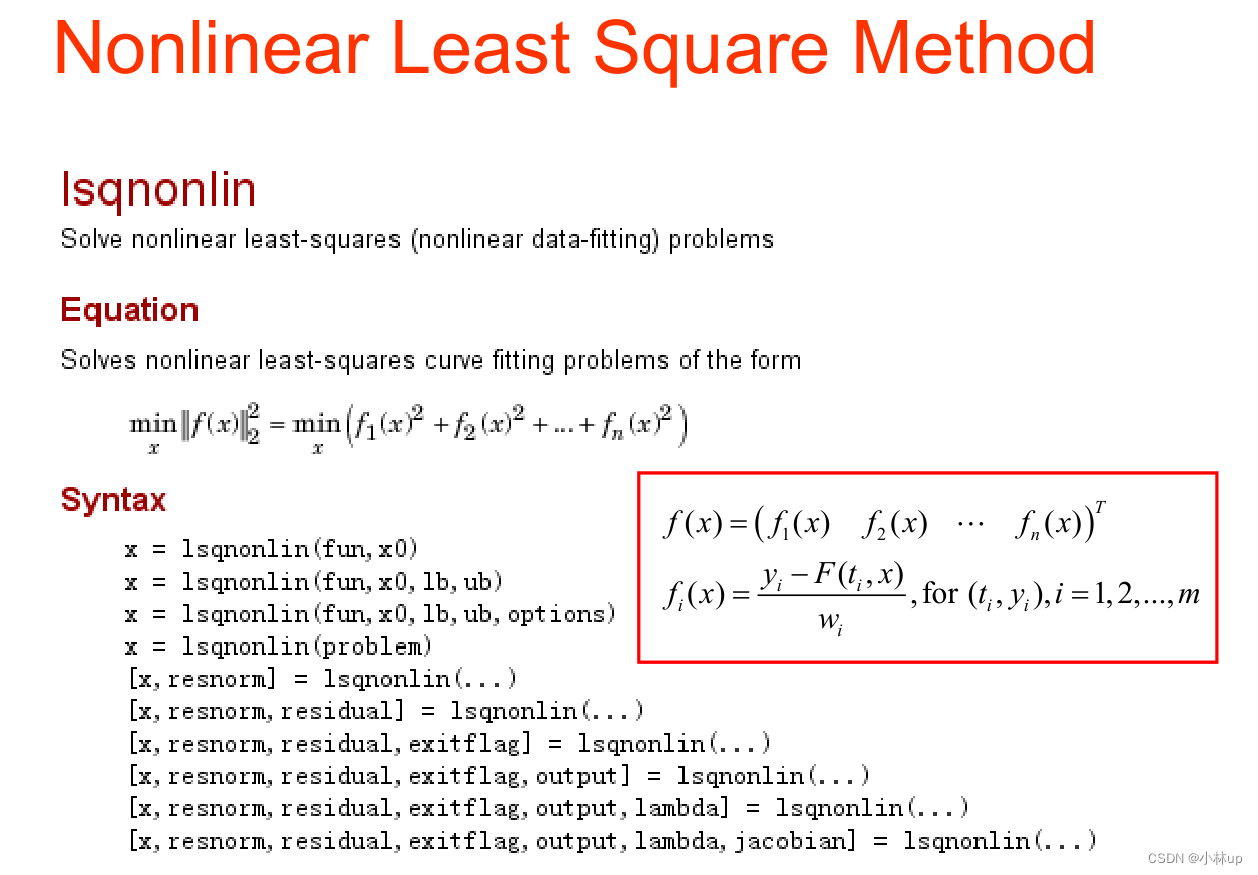
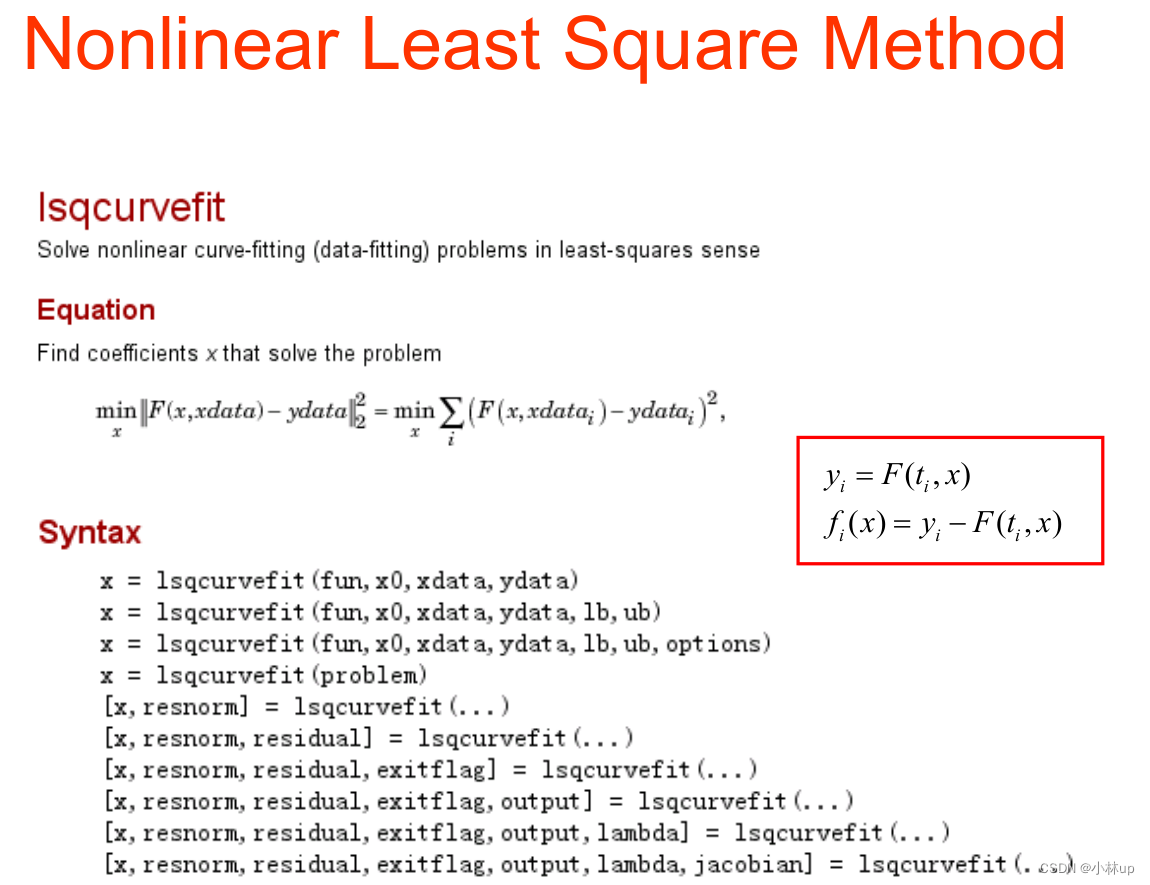
3.1.5 非线性最小二乘法
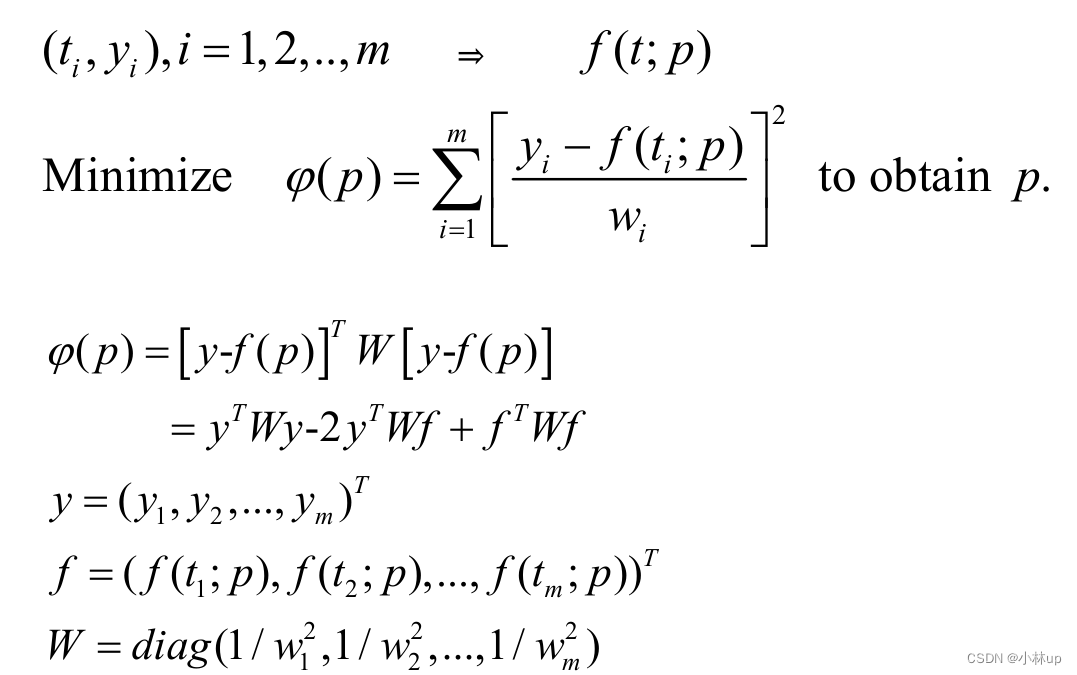
在一般最小二乘的基础上添加权重。
由此导出:Levenberg-Marquardt方法
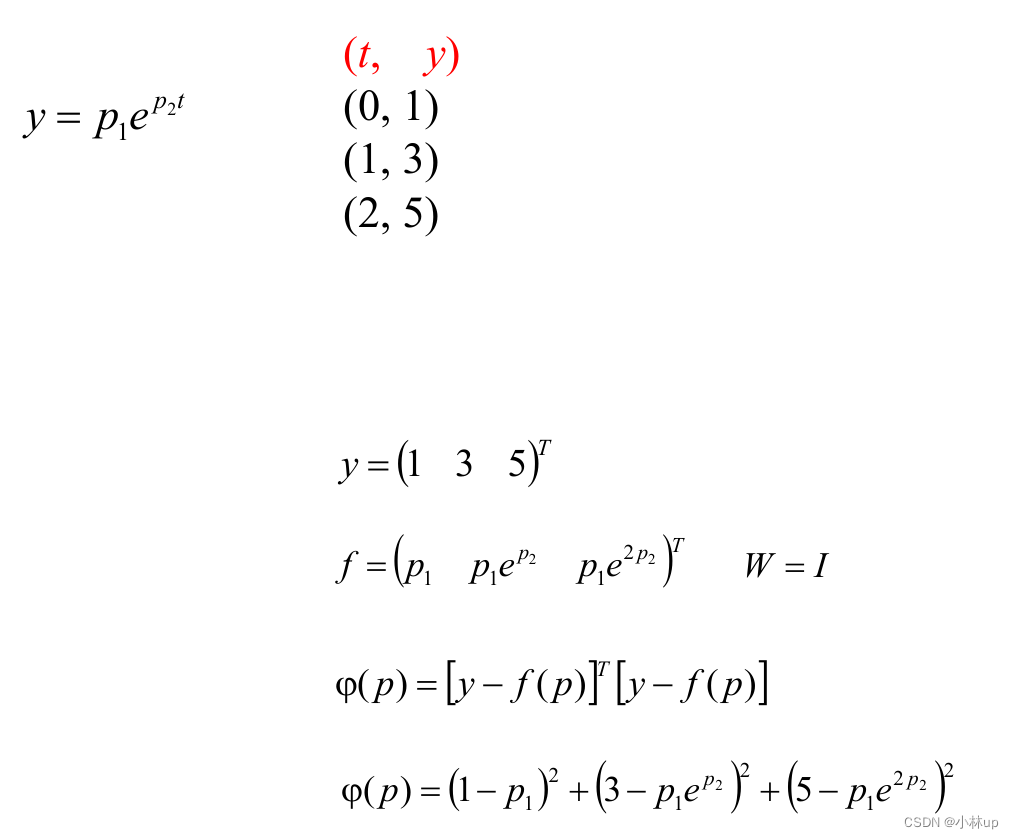
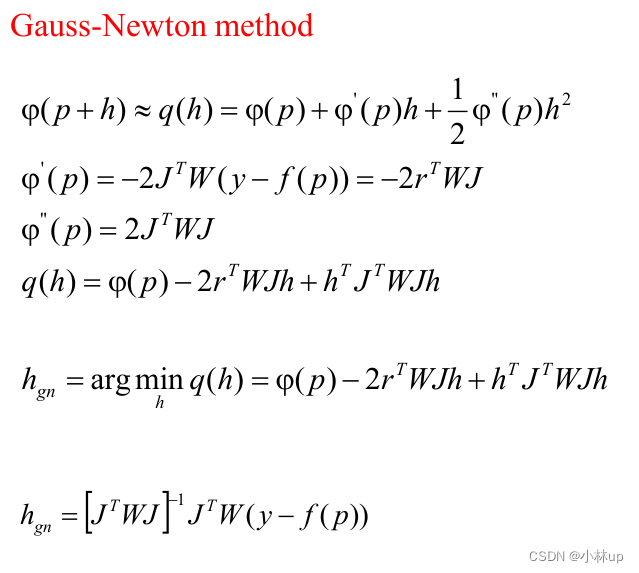
3.1.5.1 Levenberg-Marquardt方法
回顾我们的残差函数
下面推导Gradient descent Method和Gauss-Newton Method下得到的优化方法需要的步长
h
h
h。
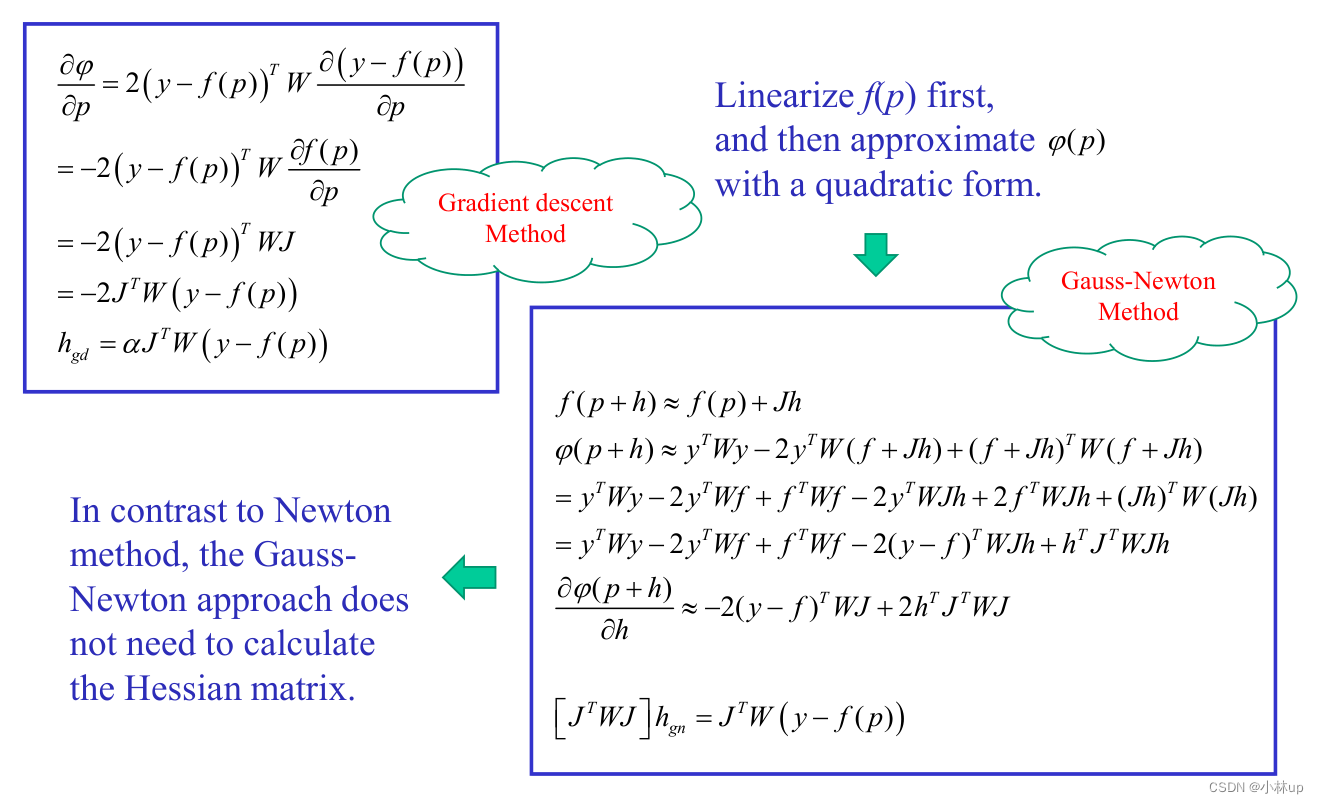
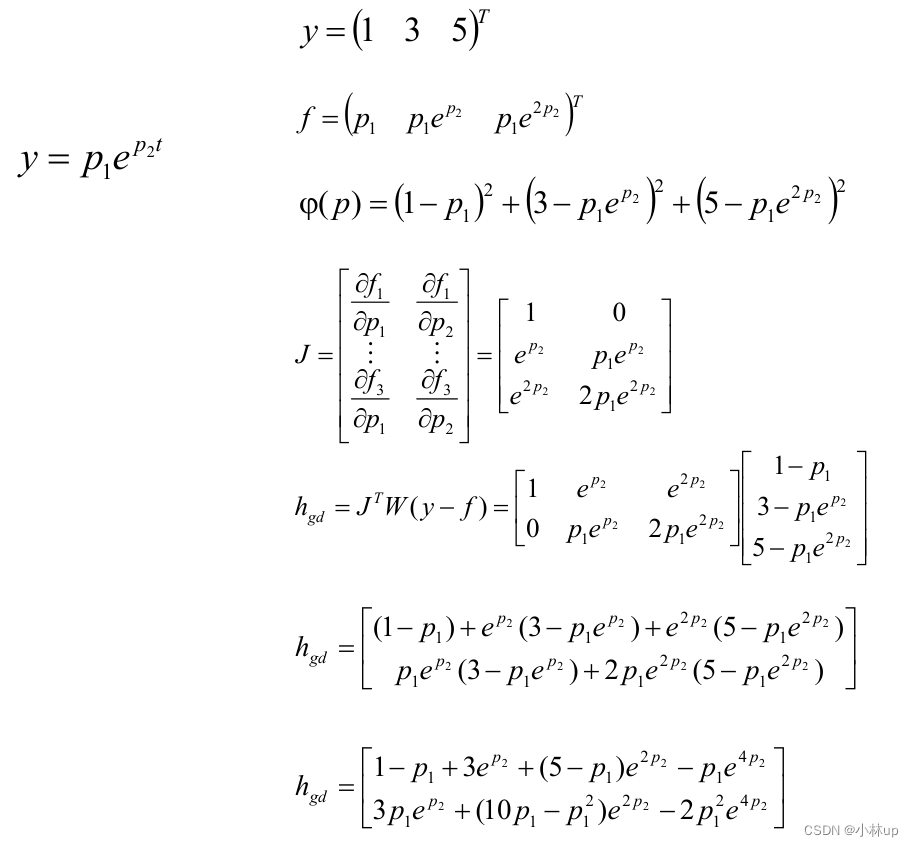
Gauss-Newton方法推导步长。
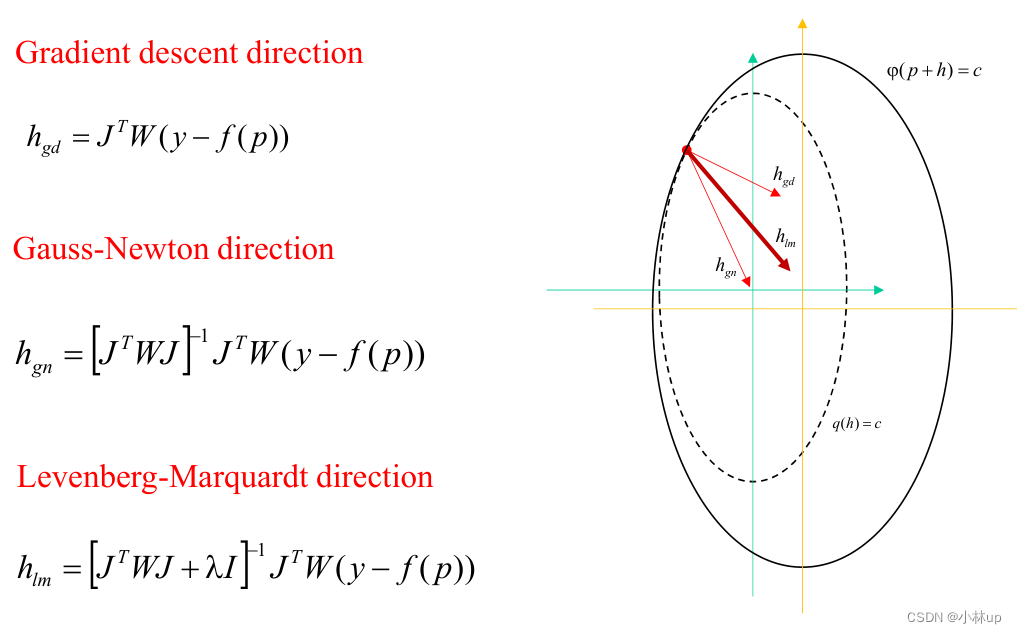
各种方法下的步长对比:
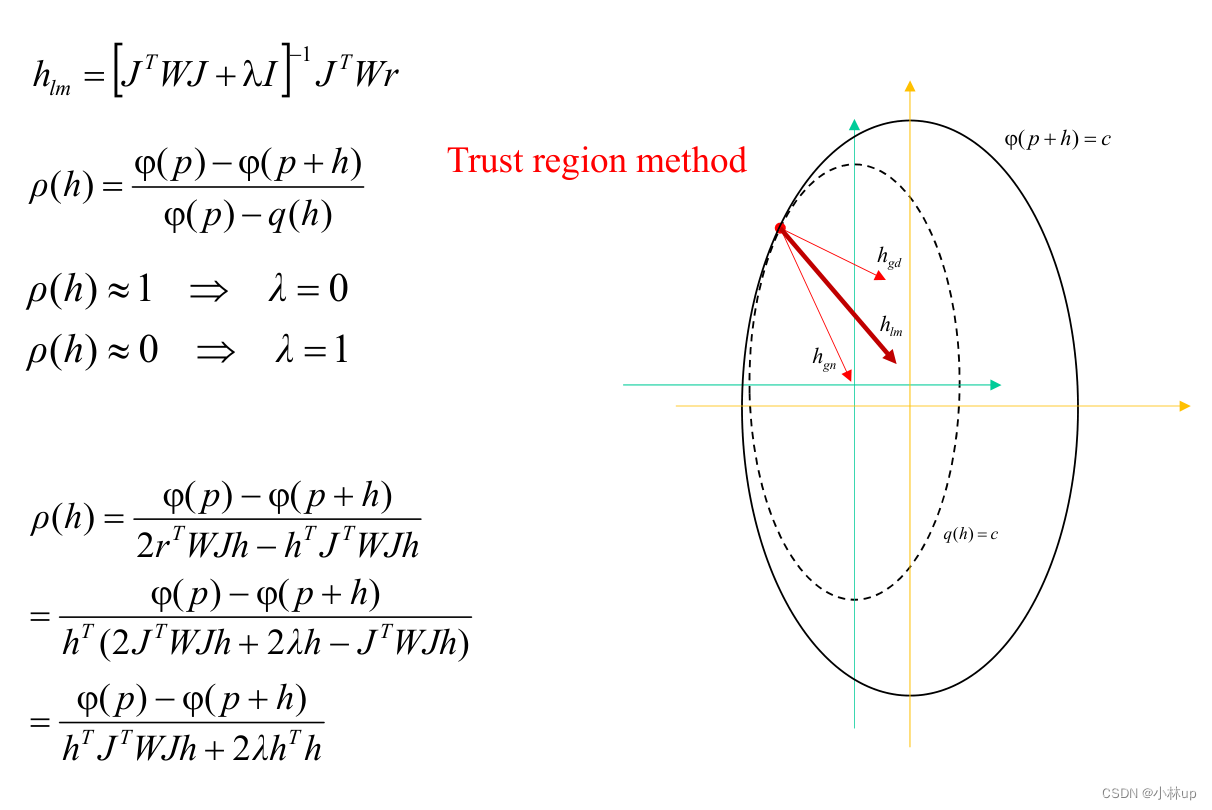
( ρ ( h ) 的表达式 \rho(h)的表达式 ρ(h)的表达式的推导的第二行是把上面的 h l m h_{lm} hlm带进去消掉 r r r)
先看下面红色框框的了解迭代的思路:
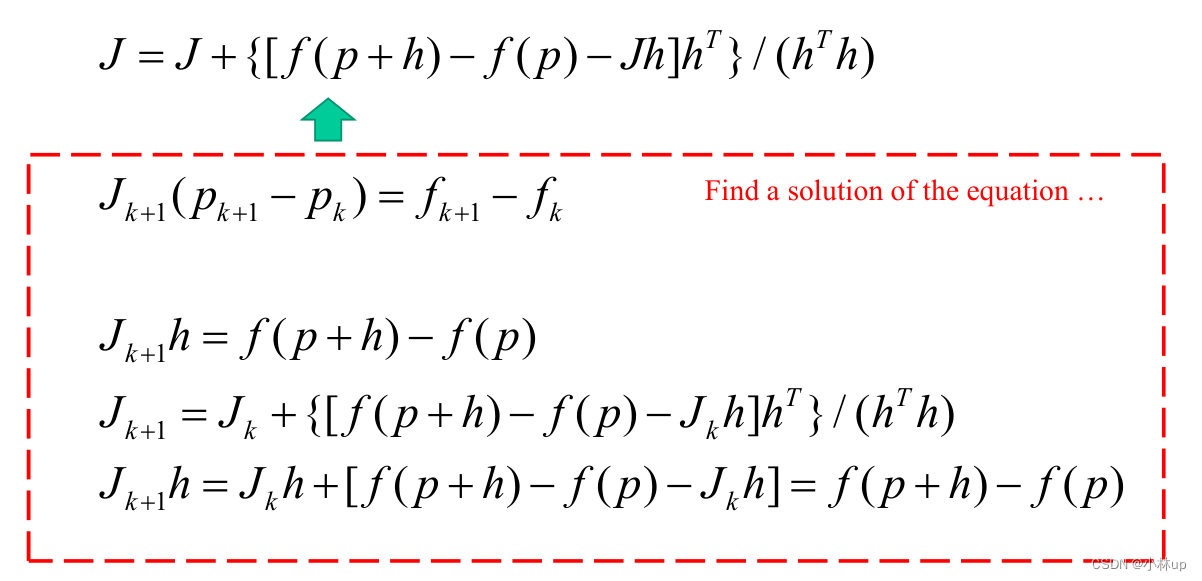
巧妙得到
J
J
J的递推式。
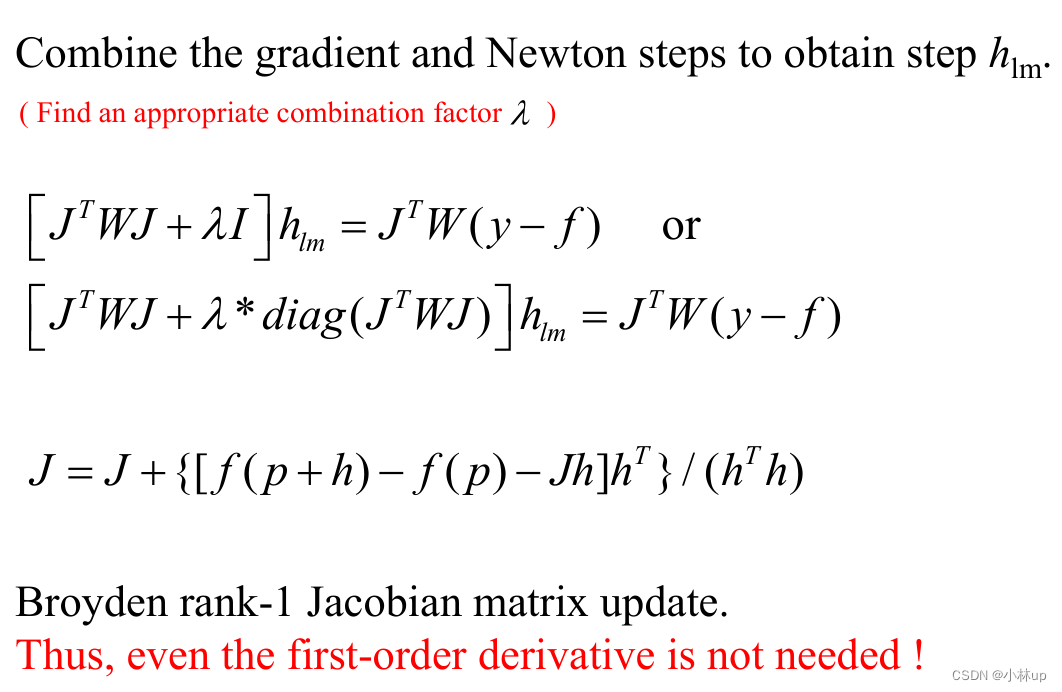
(这一页没有讲清楚)
3.1.6 多项式拟合
按照3.1.4. 多项式拟合取

y = f ( x ) = a n x n + a n − 1 x n − 1 + … + a 1 x + a 0 y=f(x)=a_{{n}} x^{{n}}+a_{{n}-1} x^{{n}-1}+\ldots+a_{1} x+a_{0} y=f(x)=anxn+an−1xn−1+…+a1x+a0
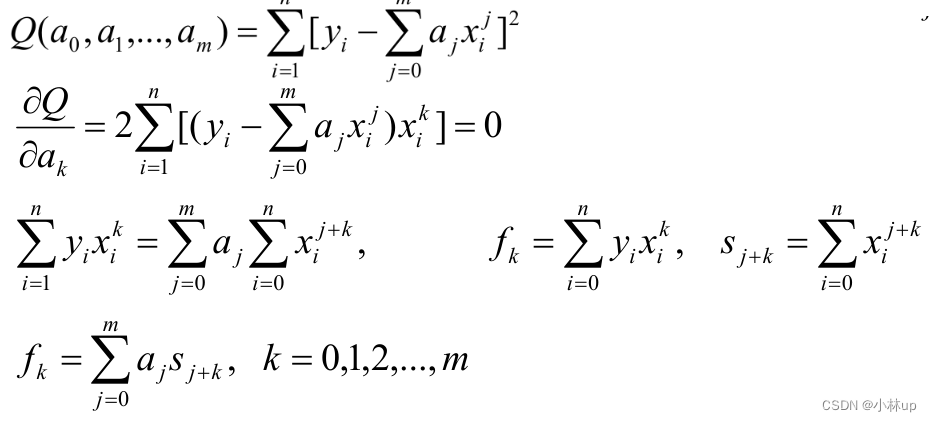
转化为解线性方程组求解 a j a_j aj
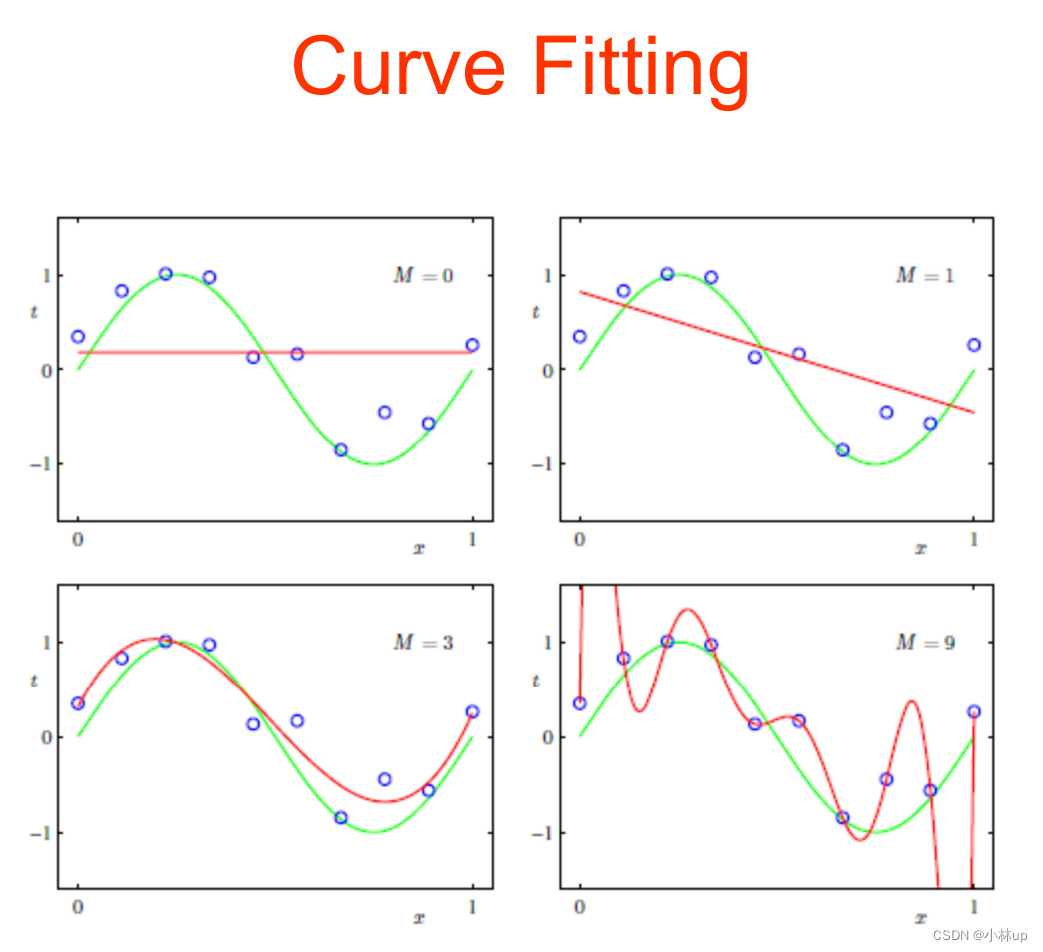
3.1.7 拟合的问题
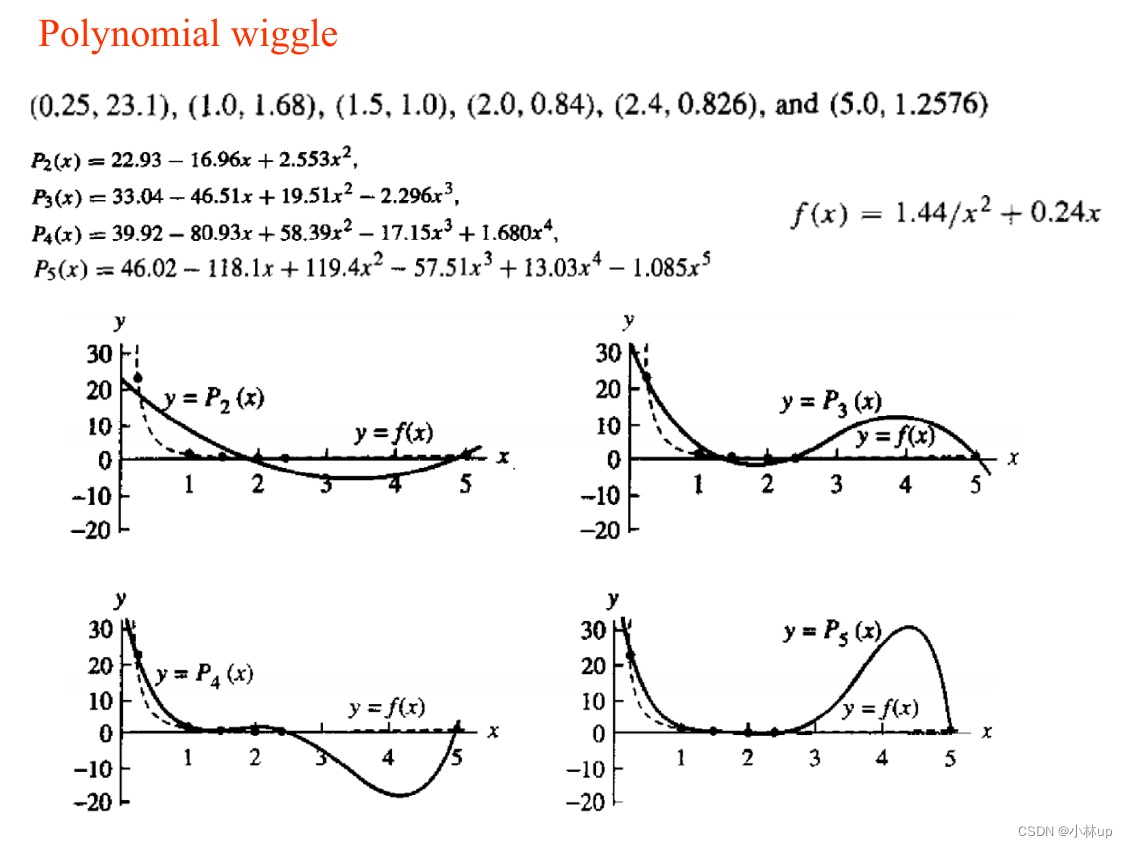
欠拟合和过拟合
多项式摆动
3.2 基于优化的拟合
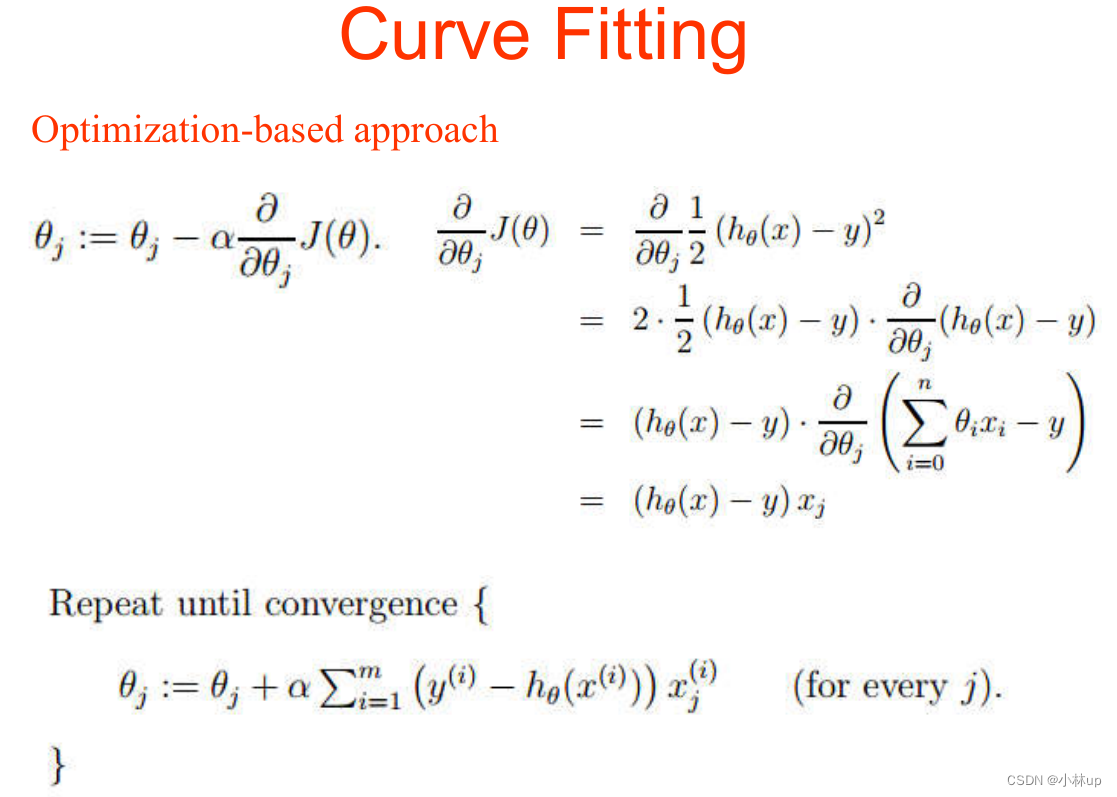
逻辑回归基于优化的方法(查看本文的3.4.1逻辑回归):
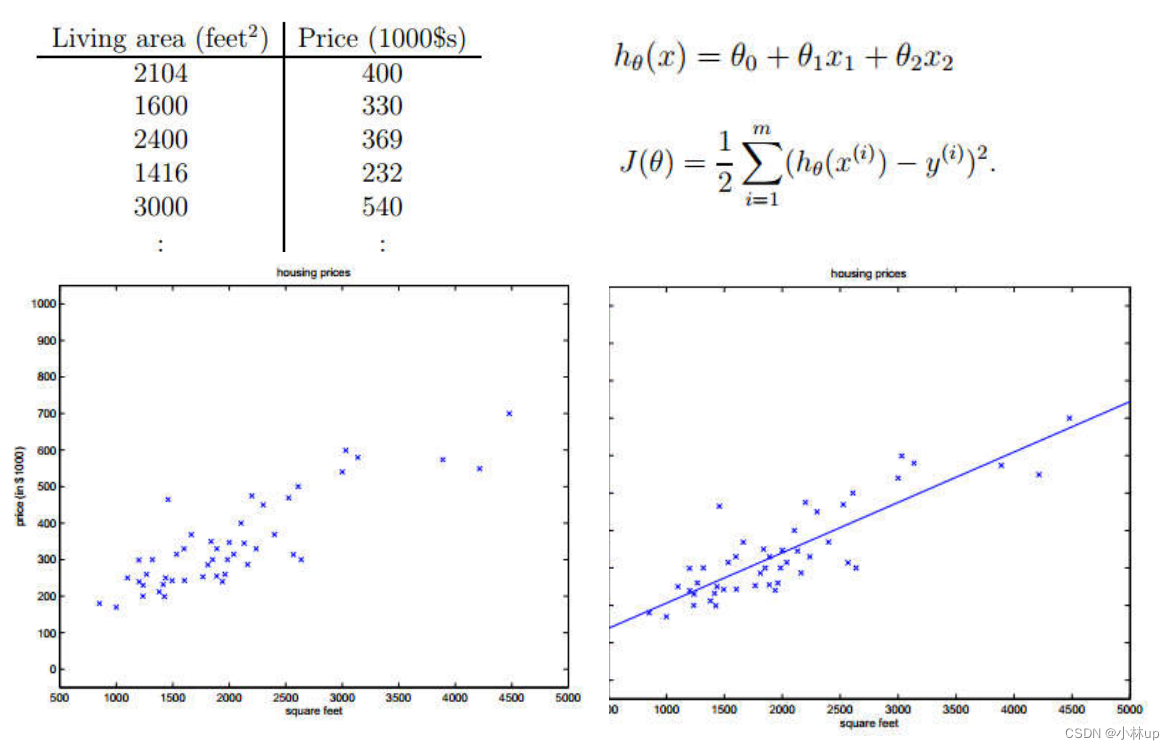
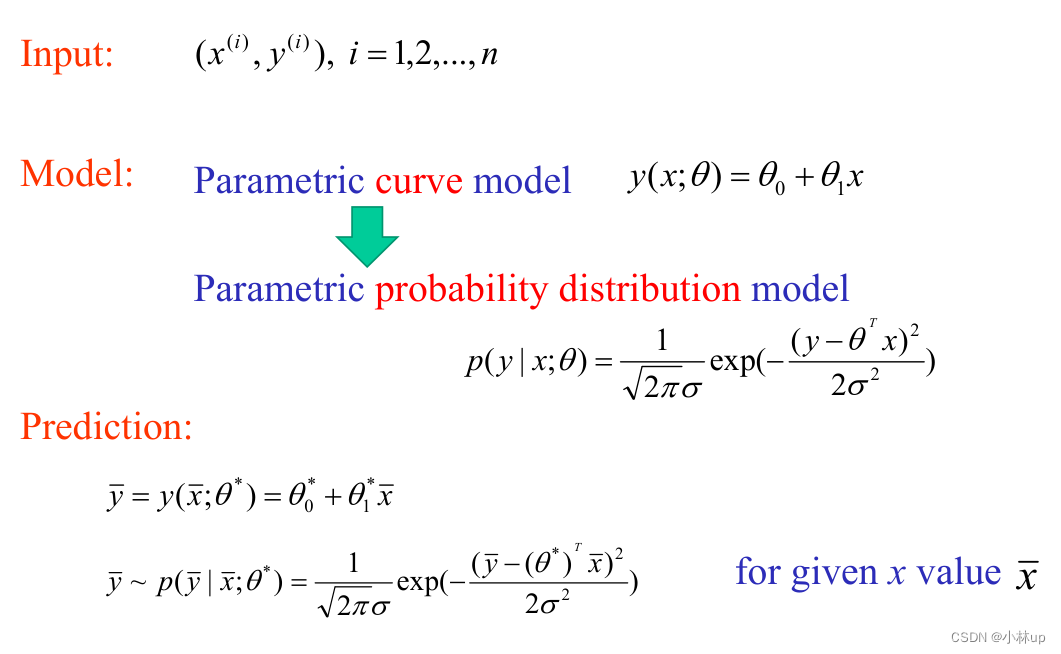
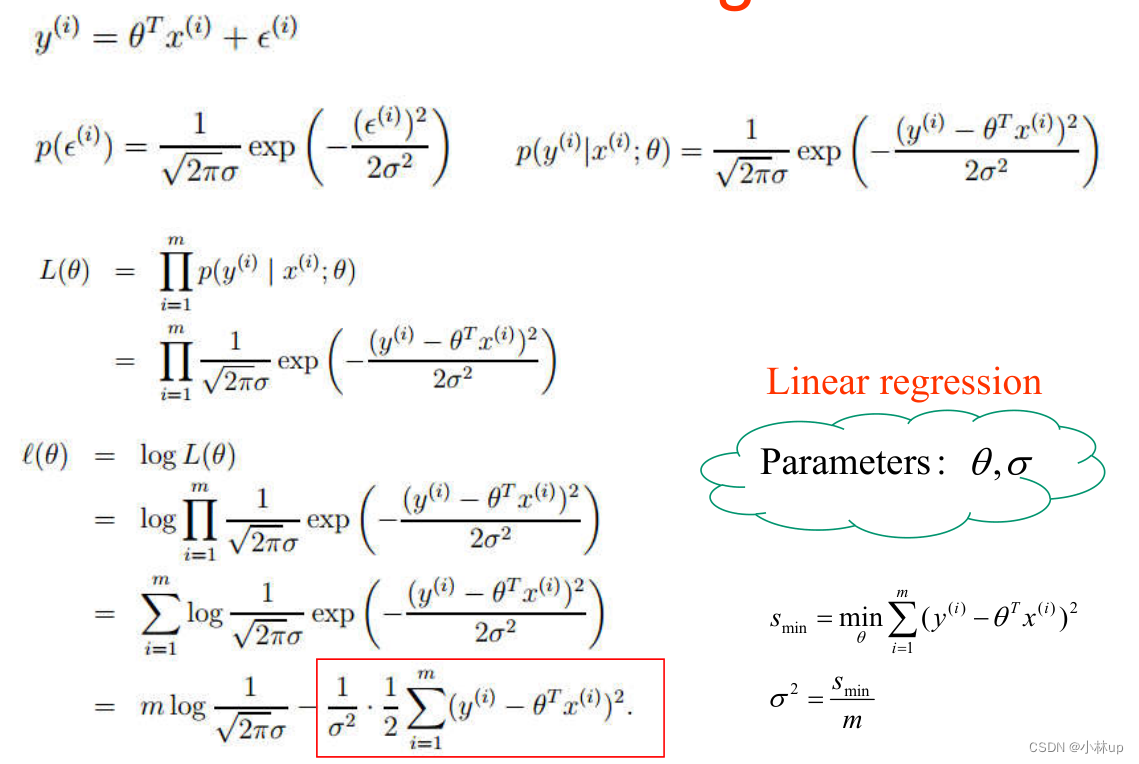
3.3 基于概率分布的模型
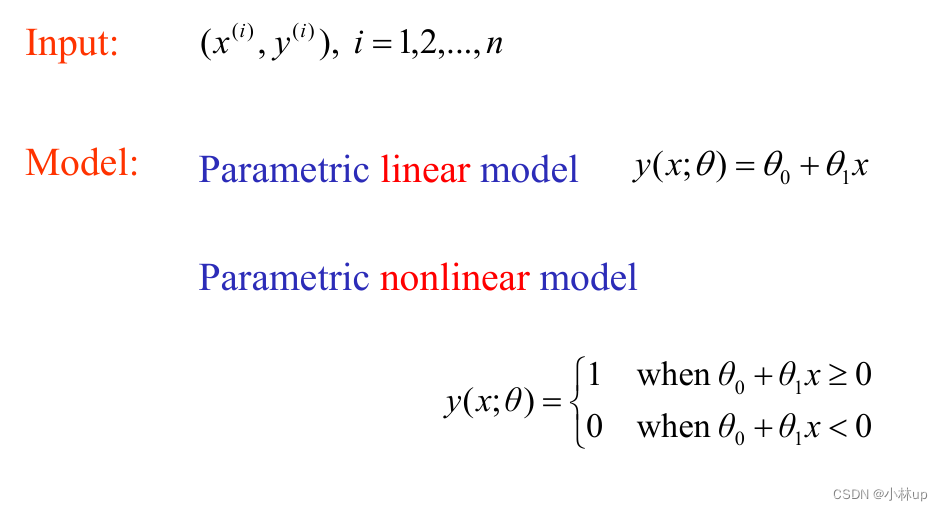
3.4 非线性曲线拟合
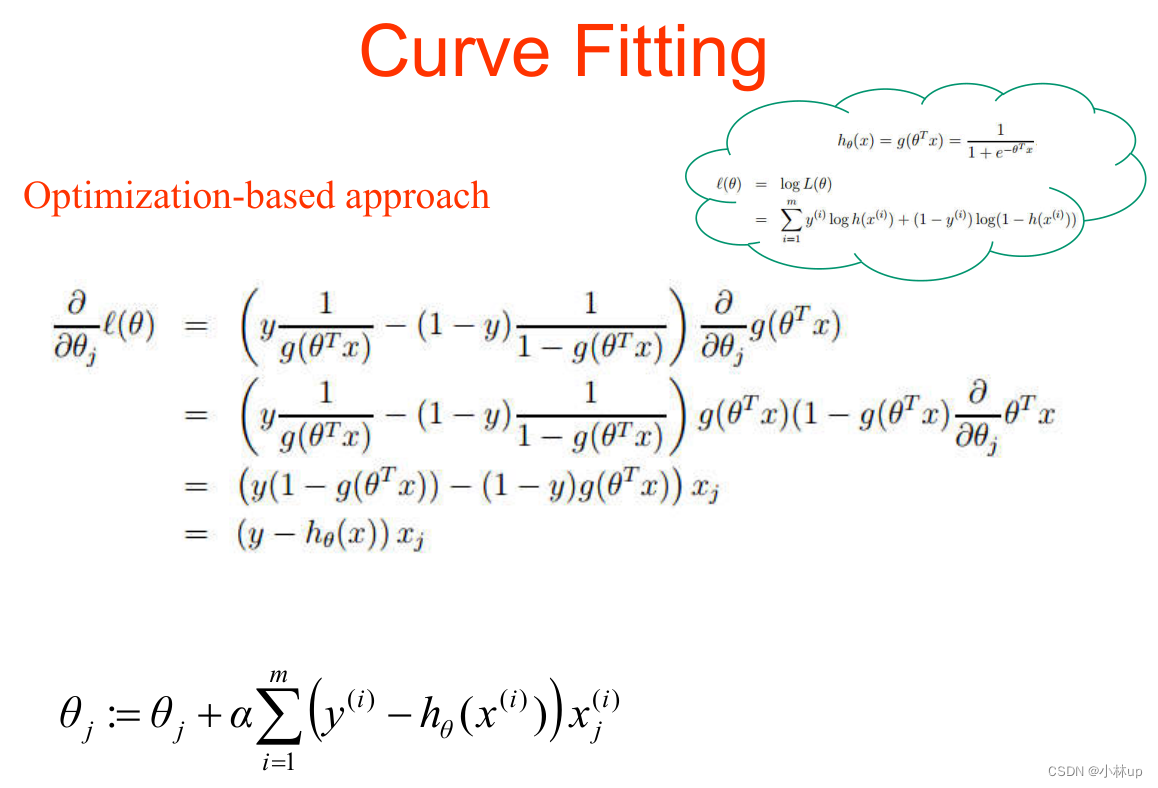
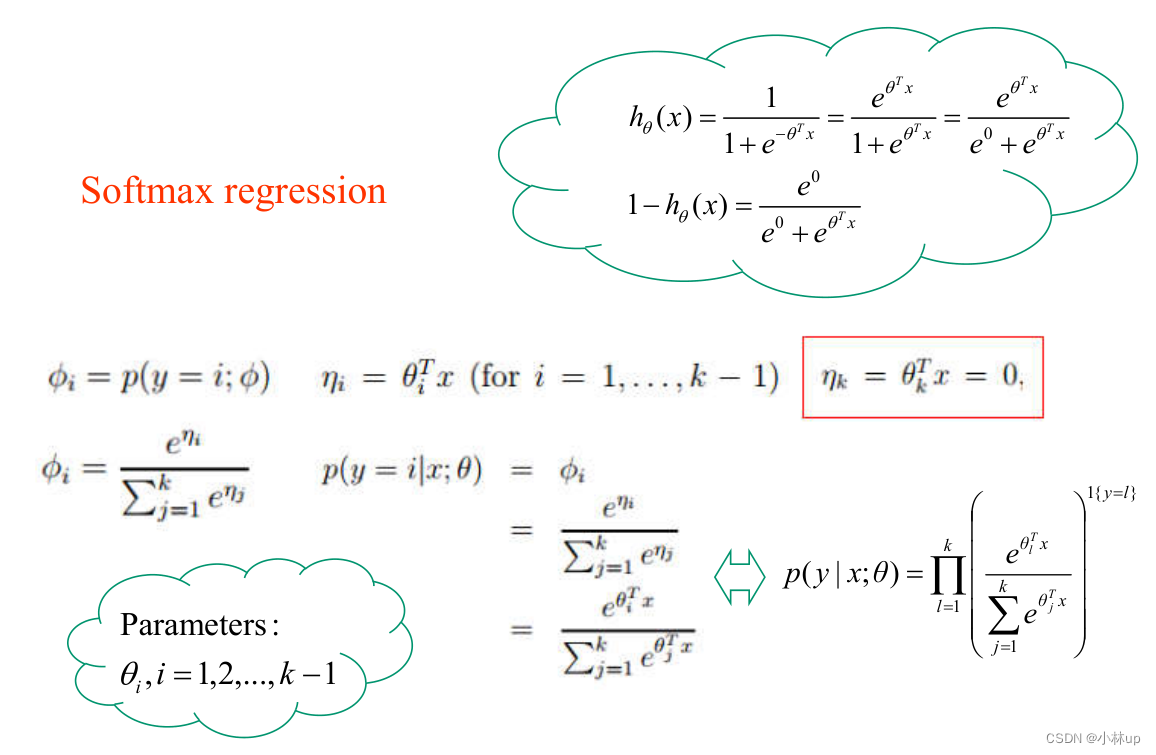
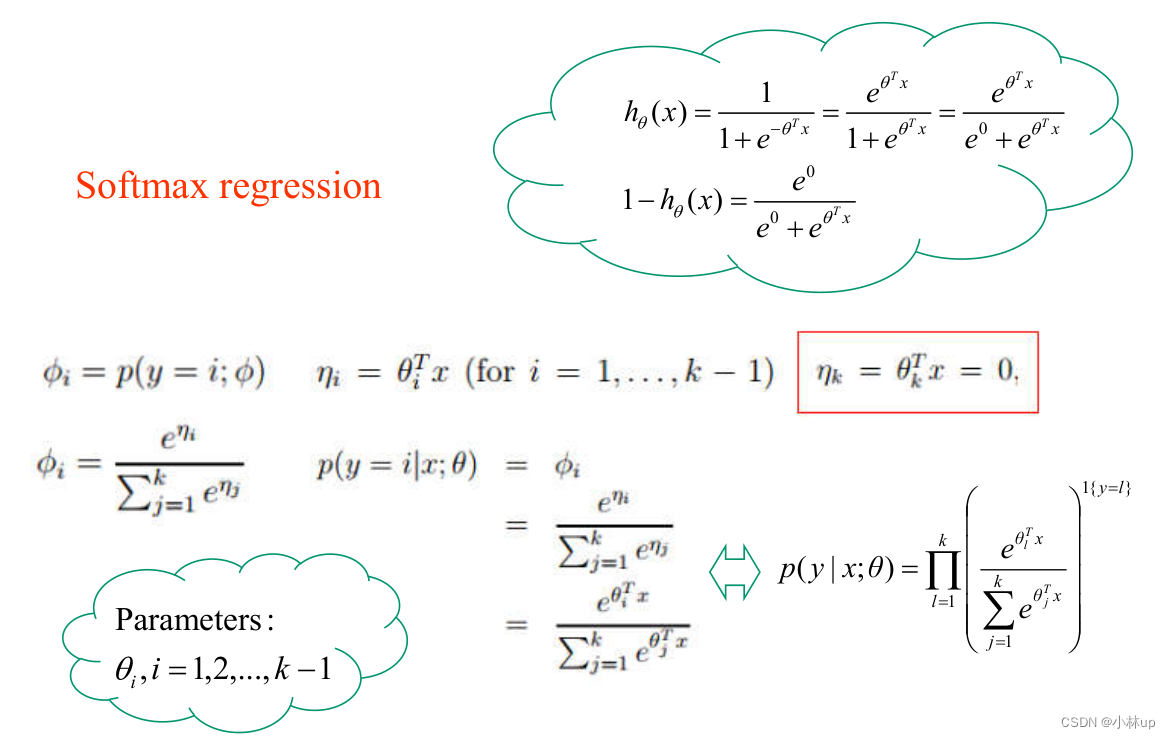
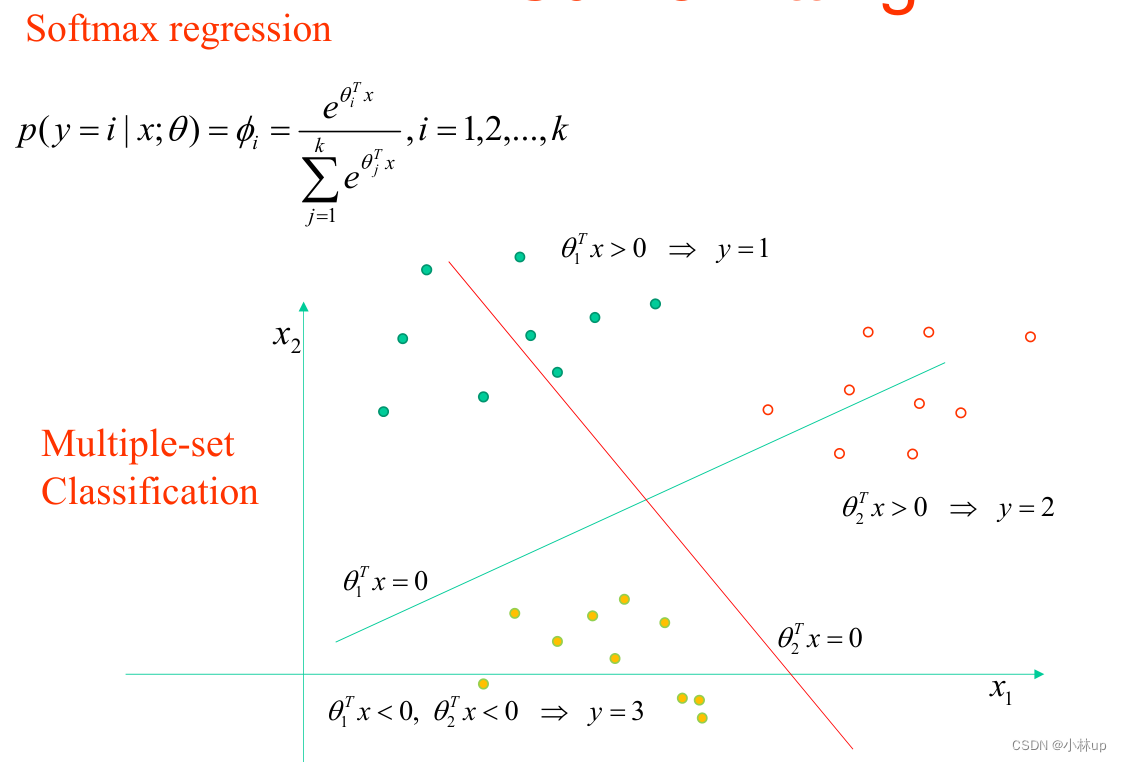
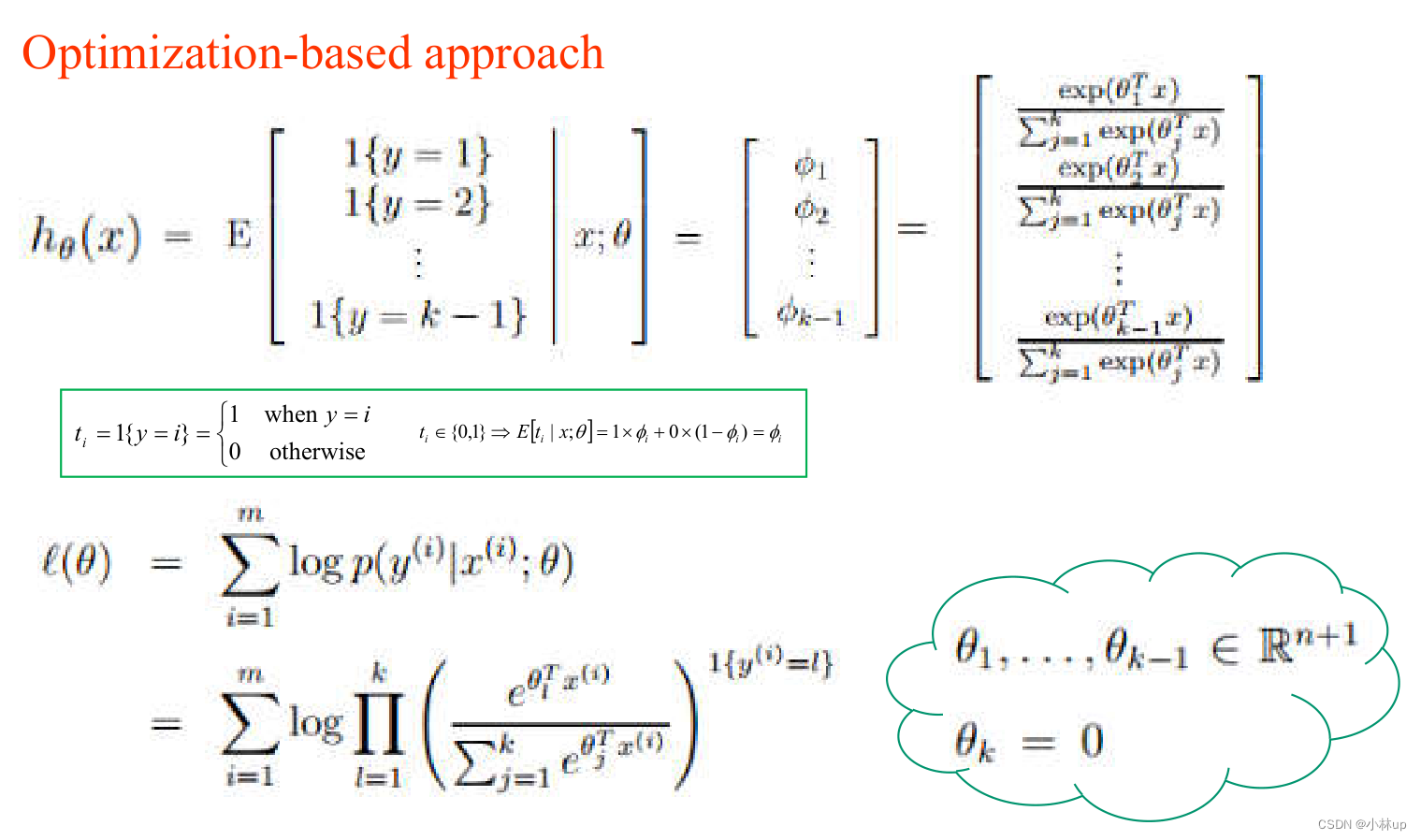
3.4.1 逻辑回归
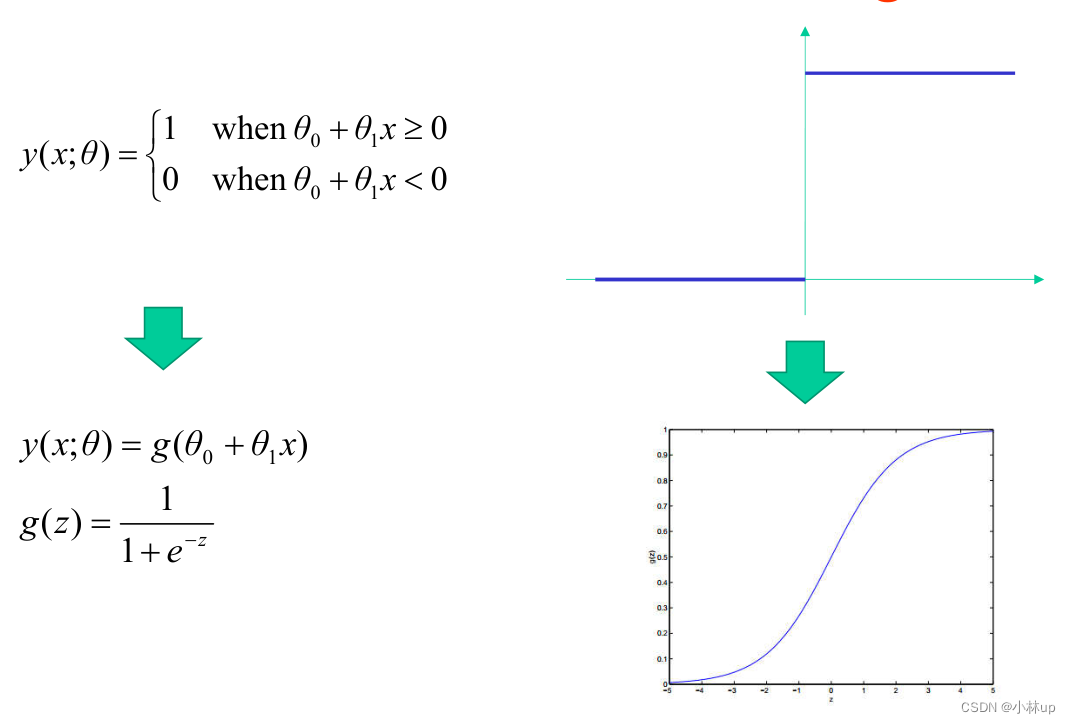
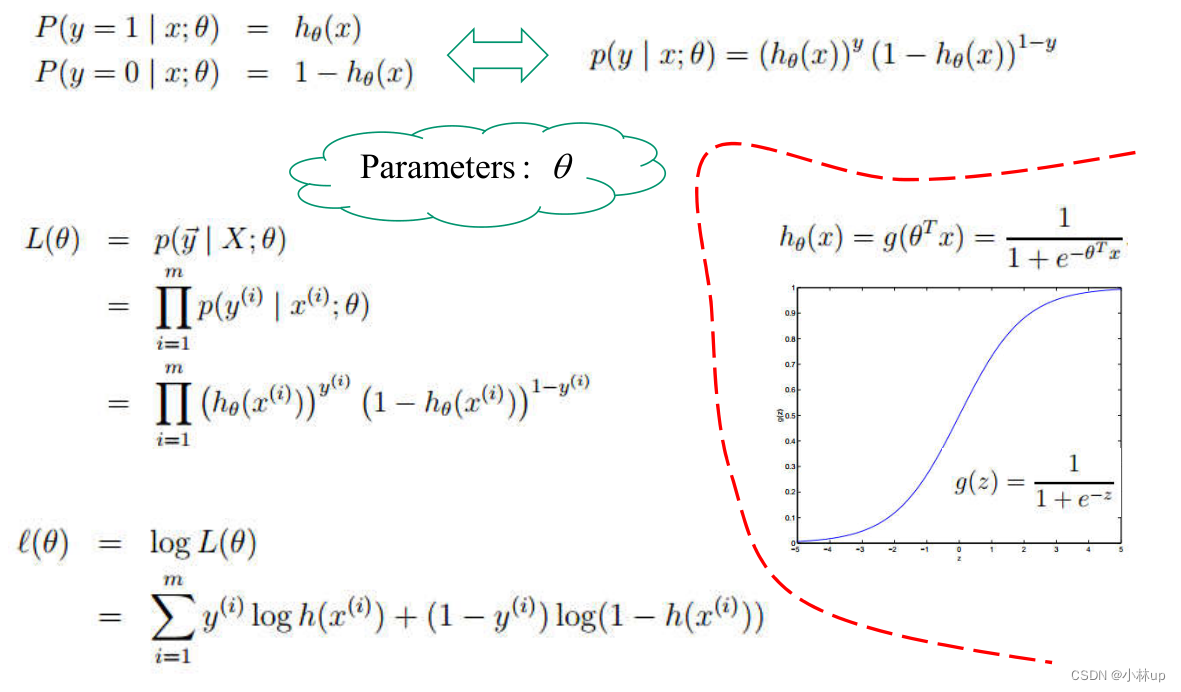
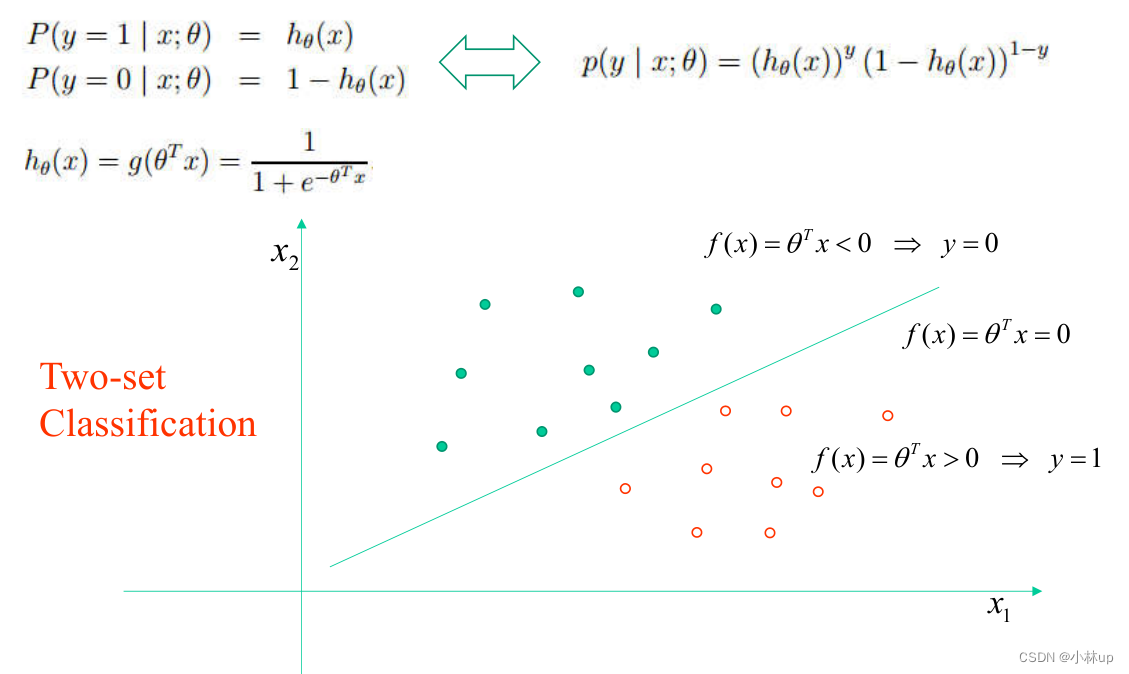
优化方法逻辑回归参考3.2 基于优化的方法
3.5 三角拟合
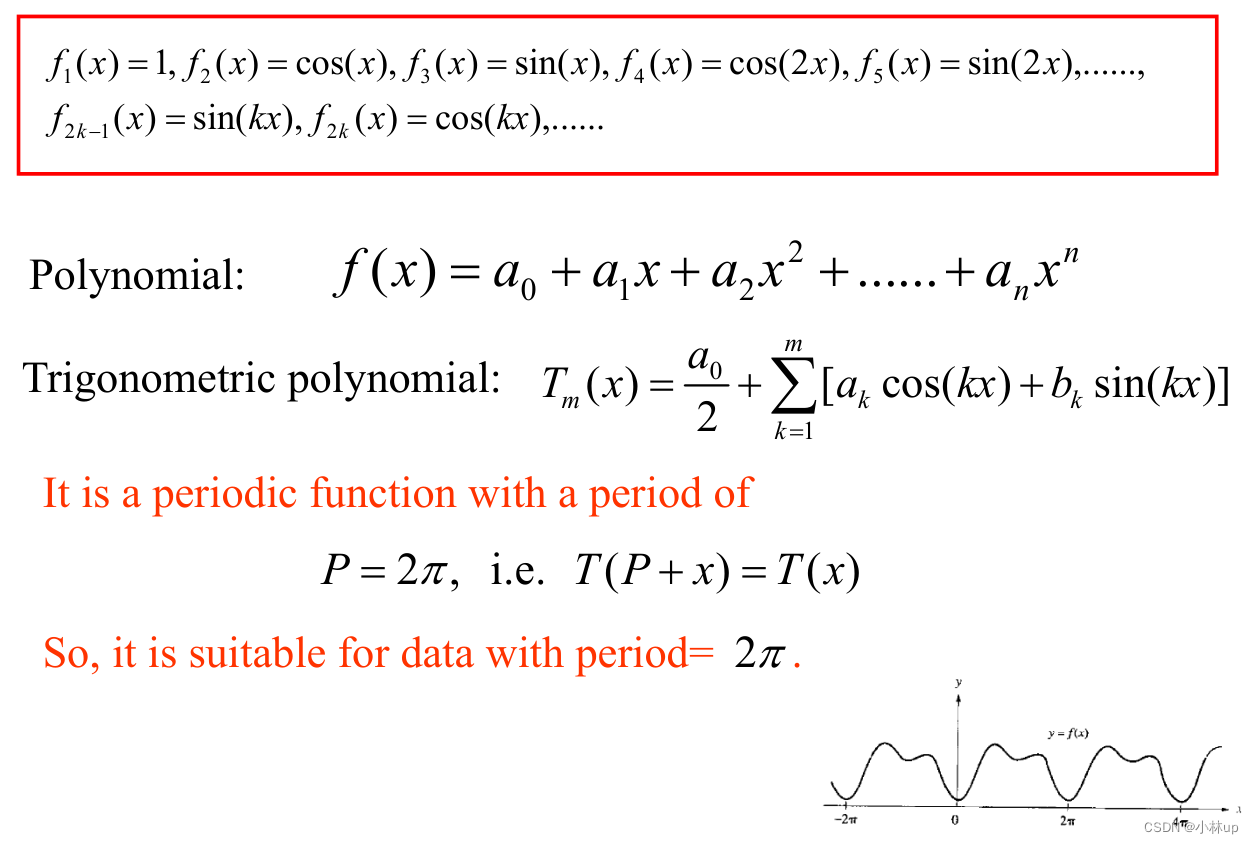
有周期性的数据,可以用三角拟合。
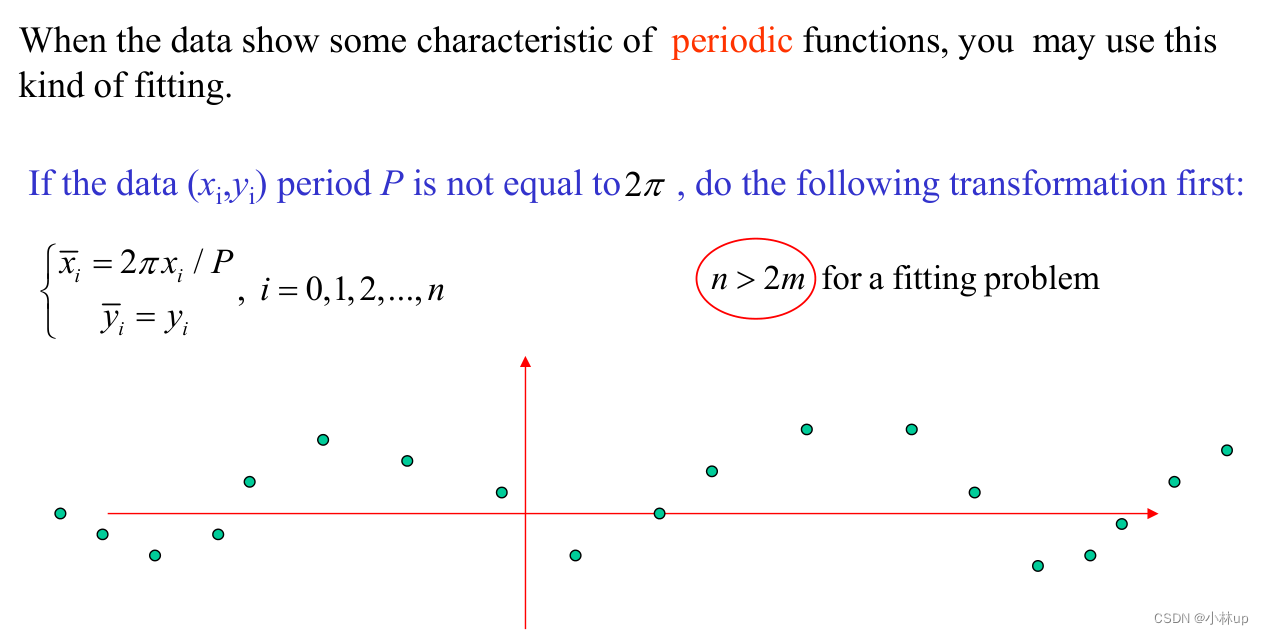
当数据的周期不等于
2
π
2\pi
2π,进行延拓。
{ x ˉ i = 2 π x i / P y ˉ i = y i , i = 0 , 1 , 2 , … , n \left\{\begin{array}{c} \bar{x}_{i}=2 \pi x_{i} / P \\ \bar{y}_{i}=y_{i} \end{array}, i=0,1,2, \ldots, n\right. {xˉi=2πxi/Pyˉi=yi,i=0,1,2,…,n
对于拟合确保 n > 2 m n>2m n>2m
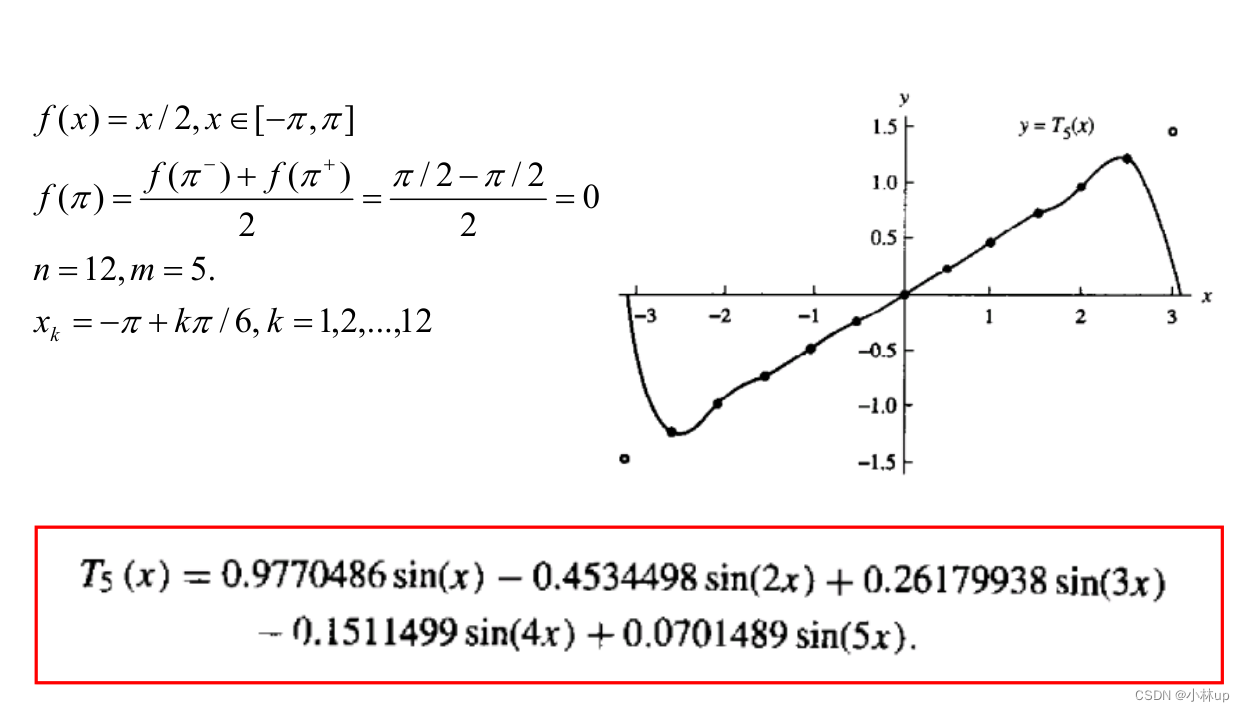
三角拟合其实是使用了傅里叶级数,下面展示了连续傅里叶级数和离散的傅里叶级数。
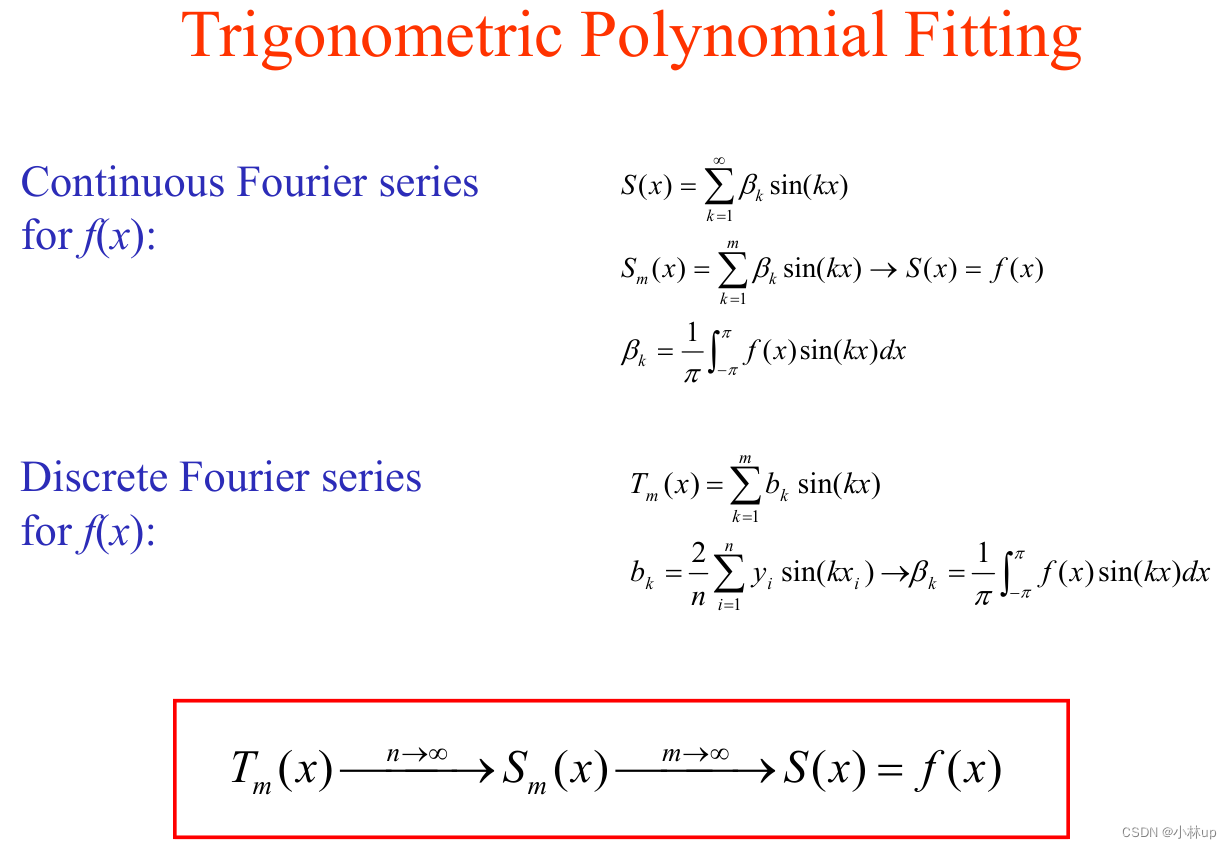
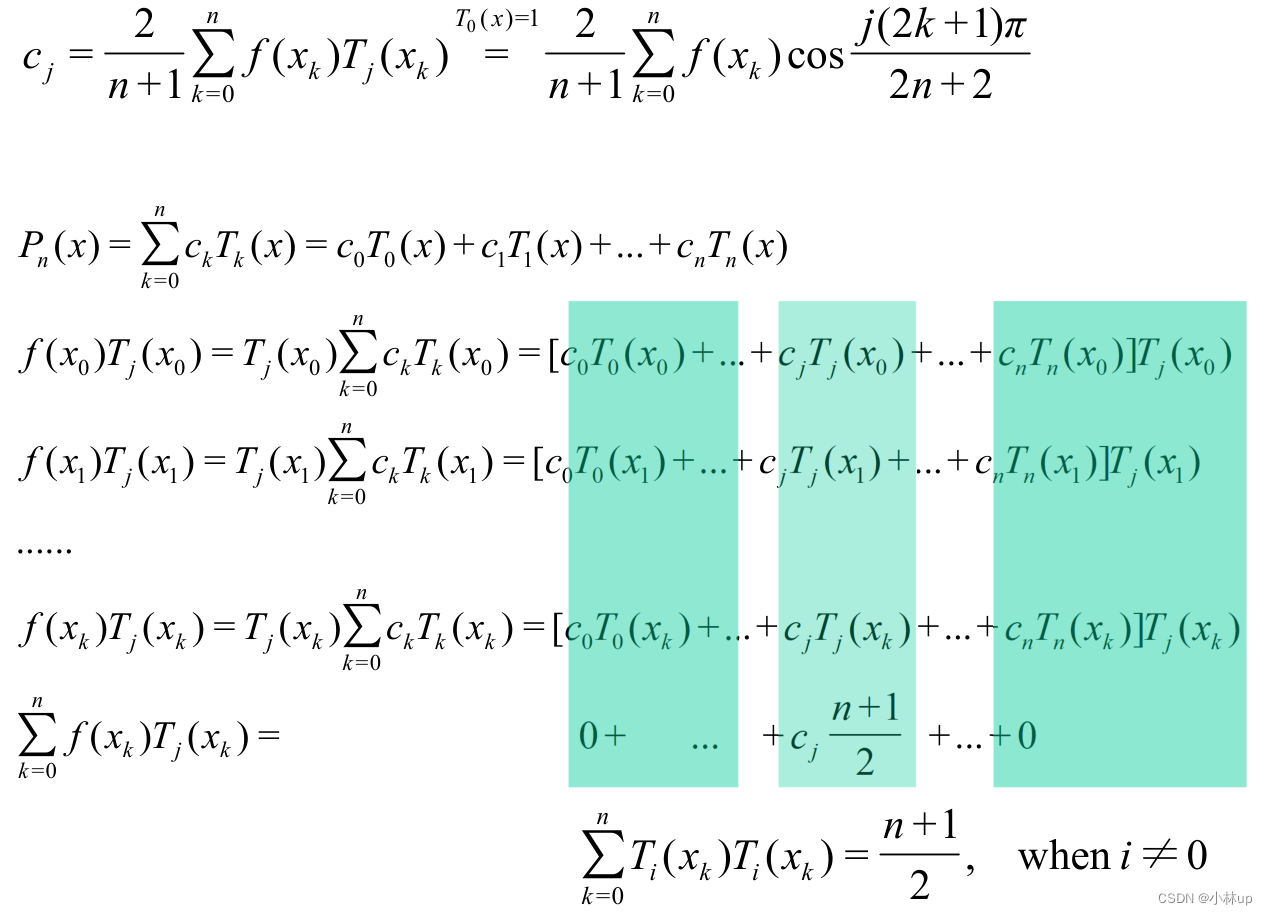
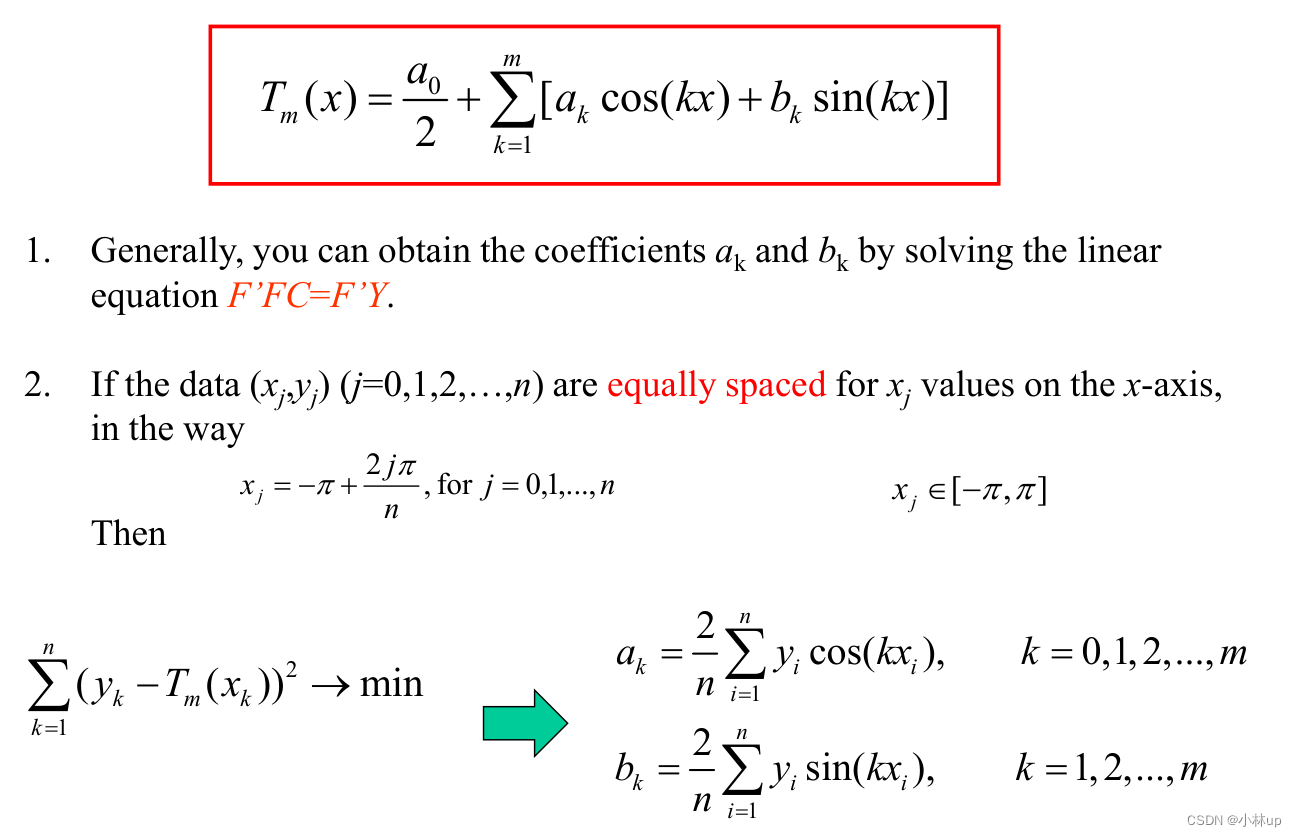
3.5.1 三角拟合的正交性质
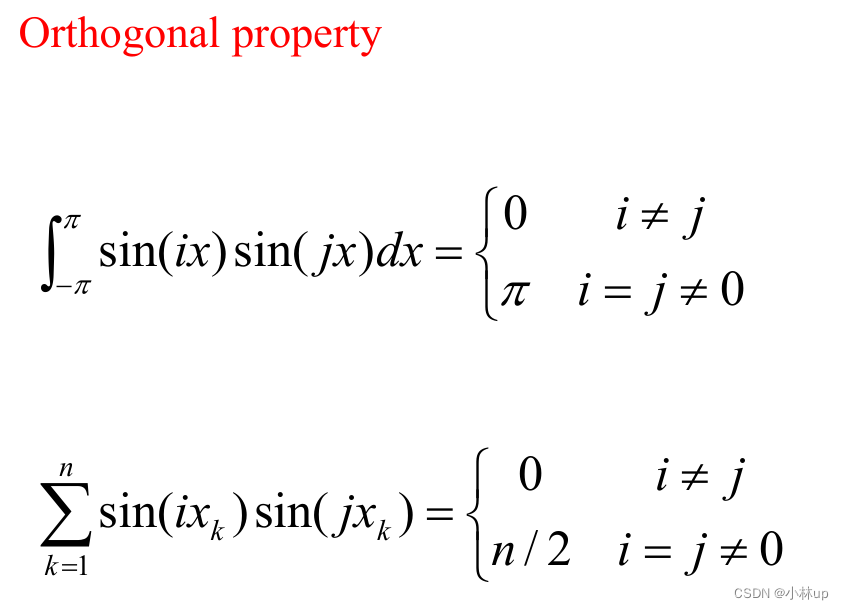
我们规定
x
k
x_k
xk是
[
−
π
,
π
]
[-\pi,\pi]
[−π,π]之中均匀取点,第一个点是
−
π
-\pi
−π,最后一个点是
π
\pi
π,
x
k
=
−
π
+
2
k
π
n
,
k
=
1
,
⋯
,
n
x_k=-\pi+\frac{2k\pi}{n},k=1,\cdots,n
xk=−π+n2kπ,k=1,⋯,n
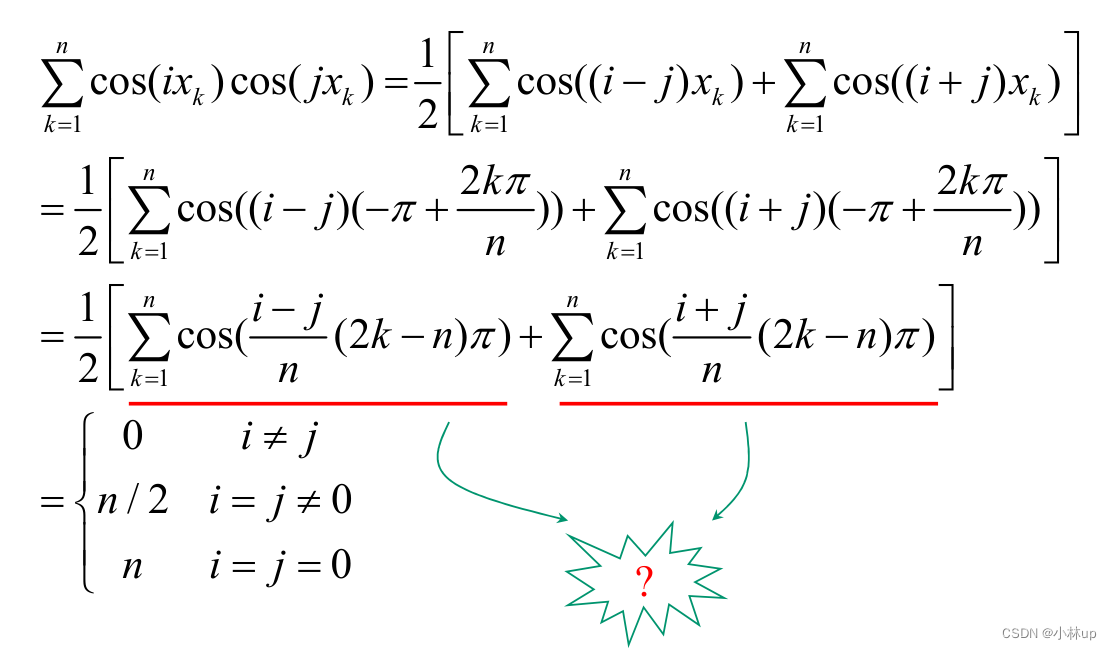
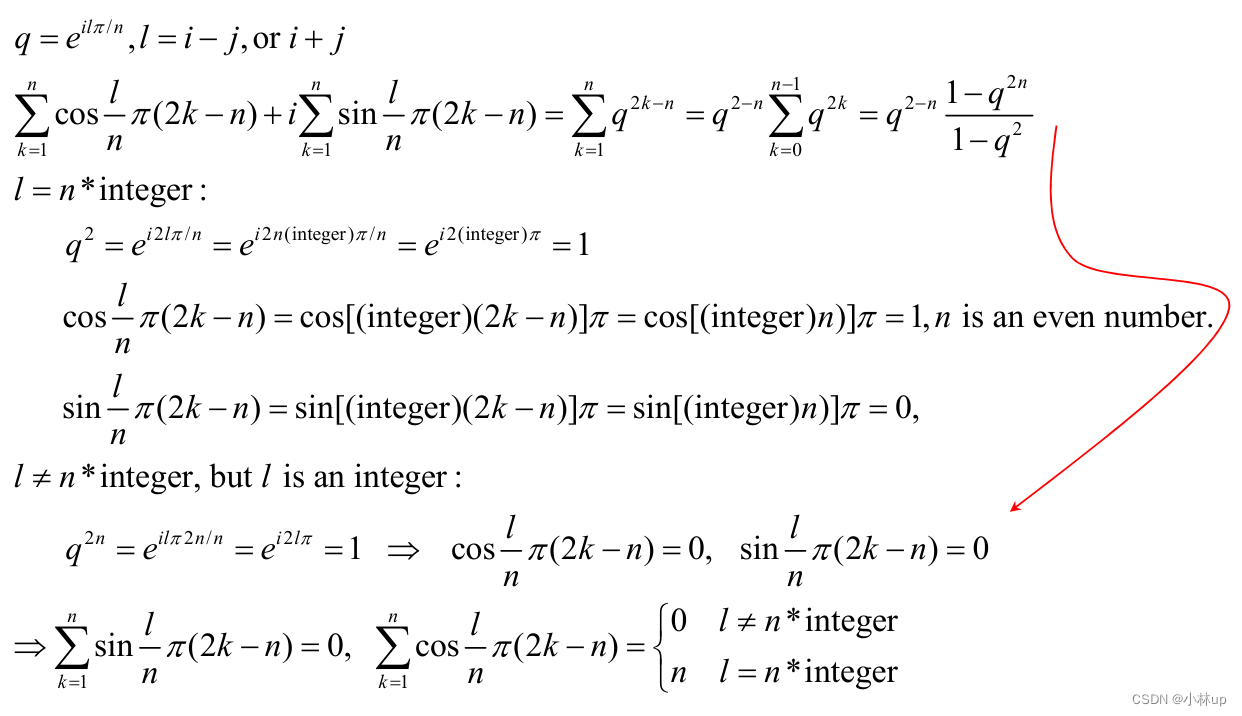
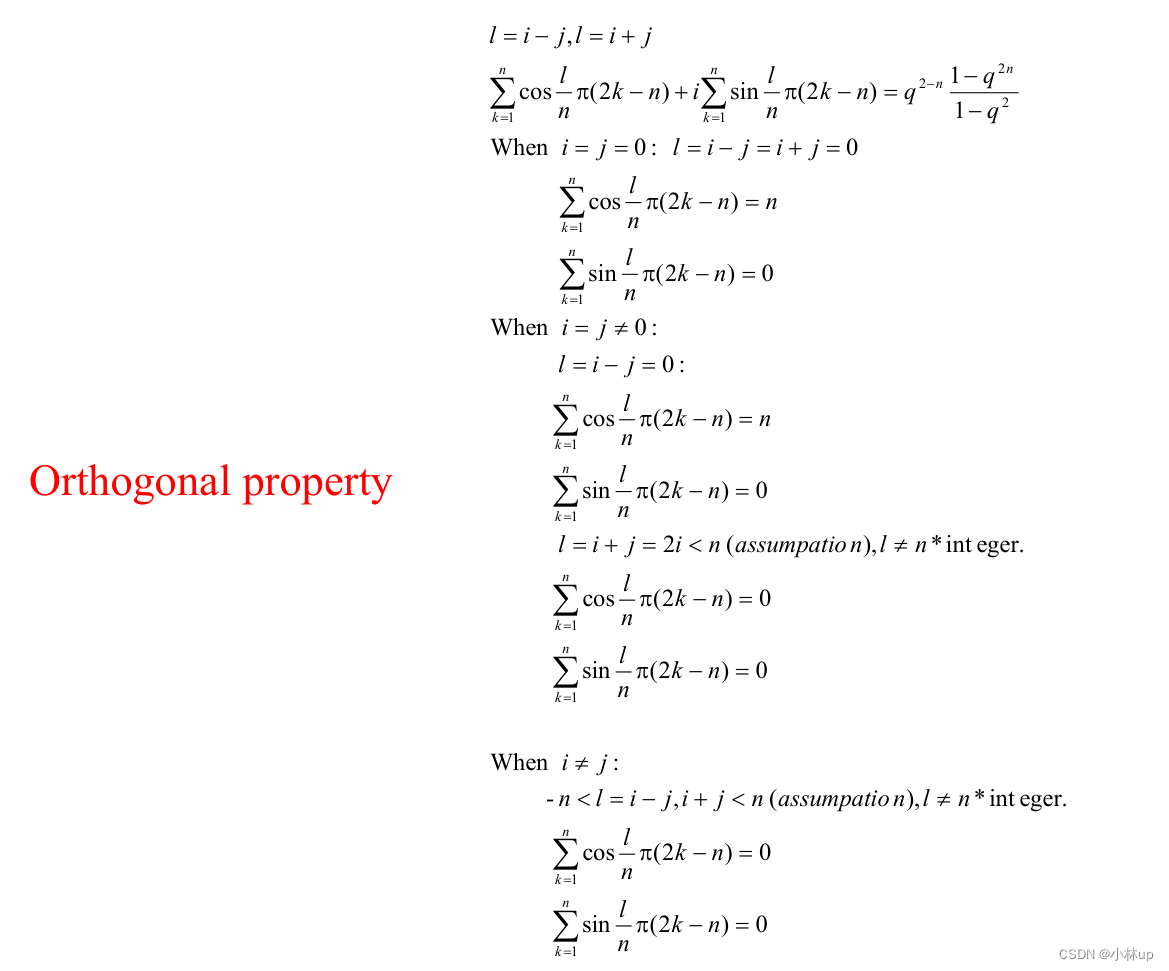
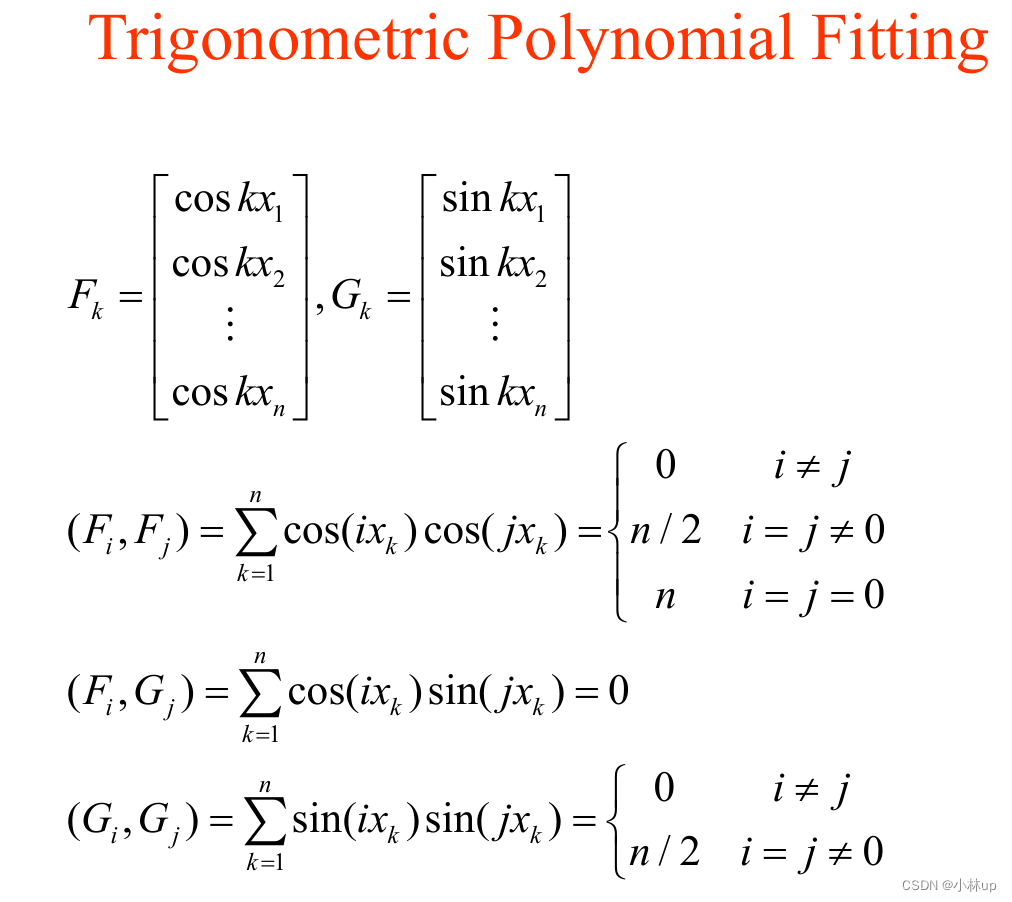
最小二乘法求系数。
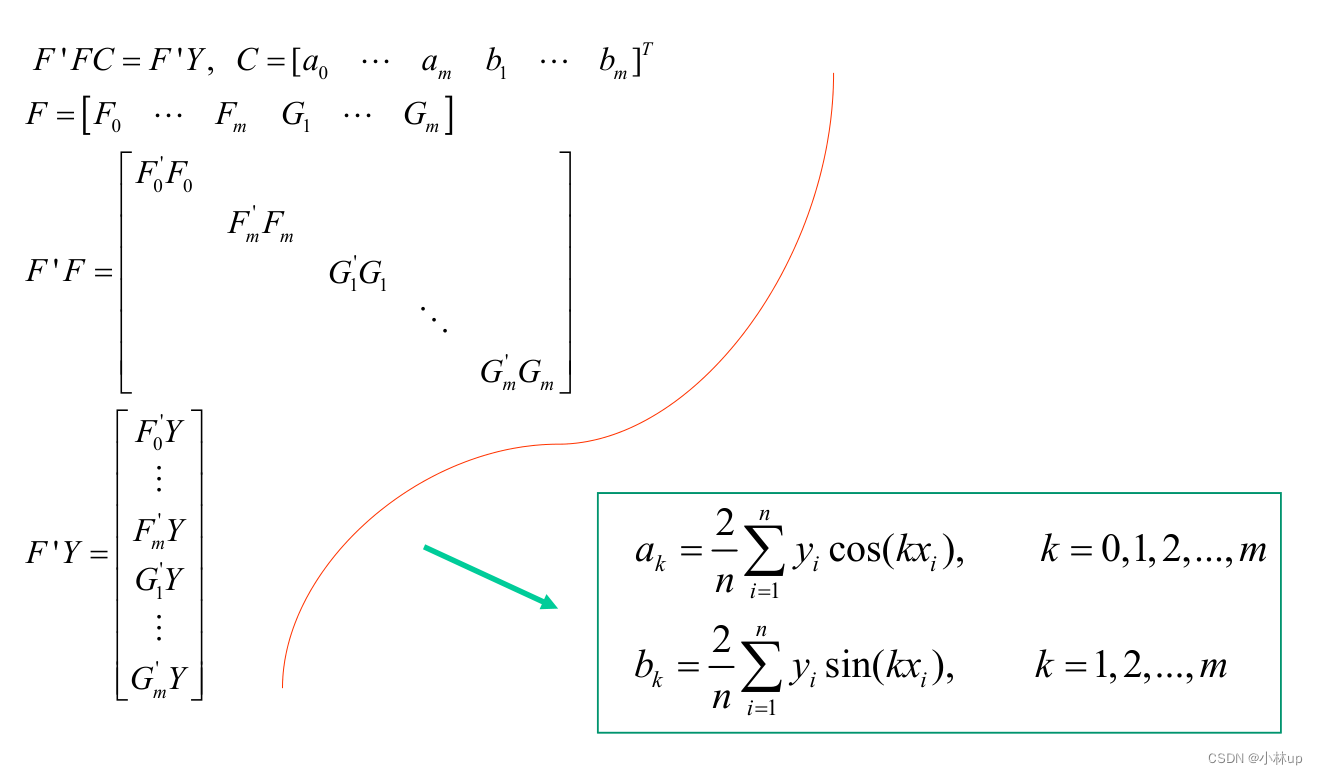
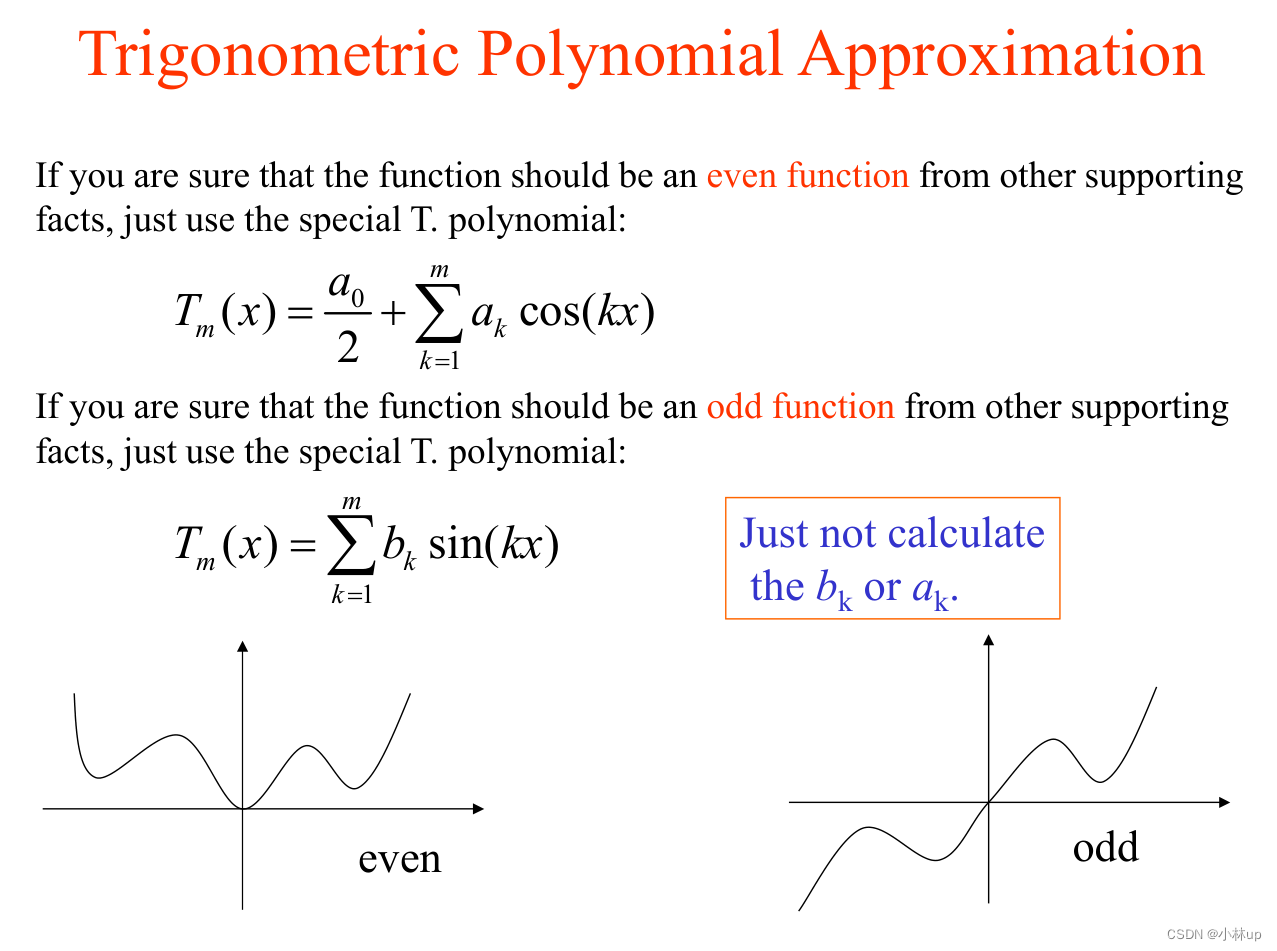
偶函数和基函数下可以简化
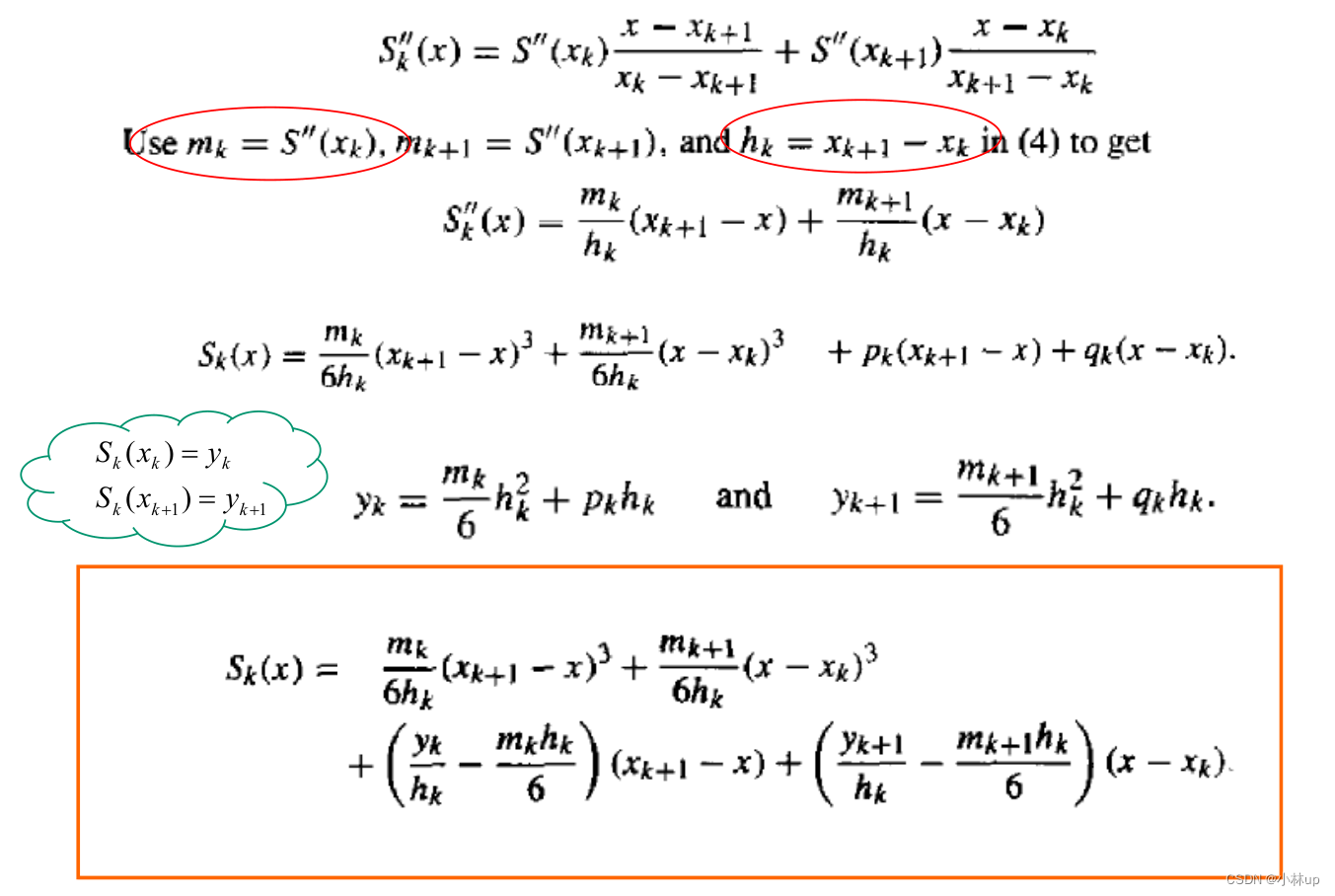
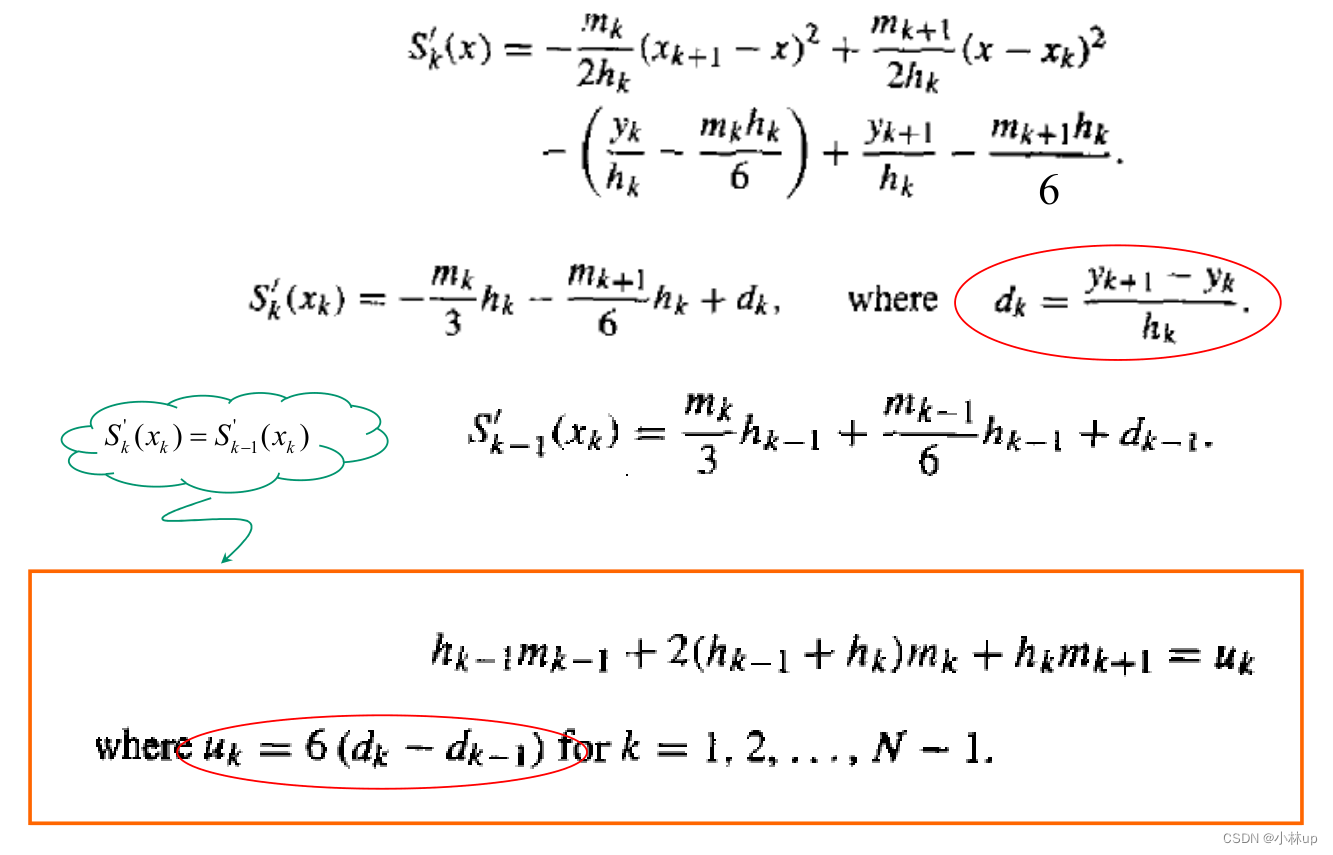
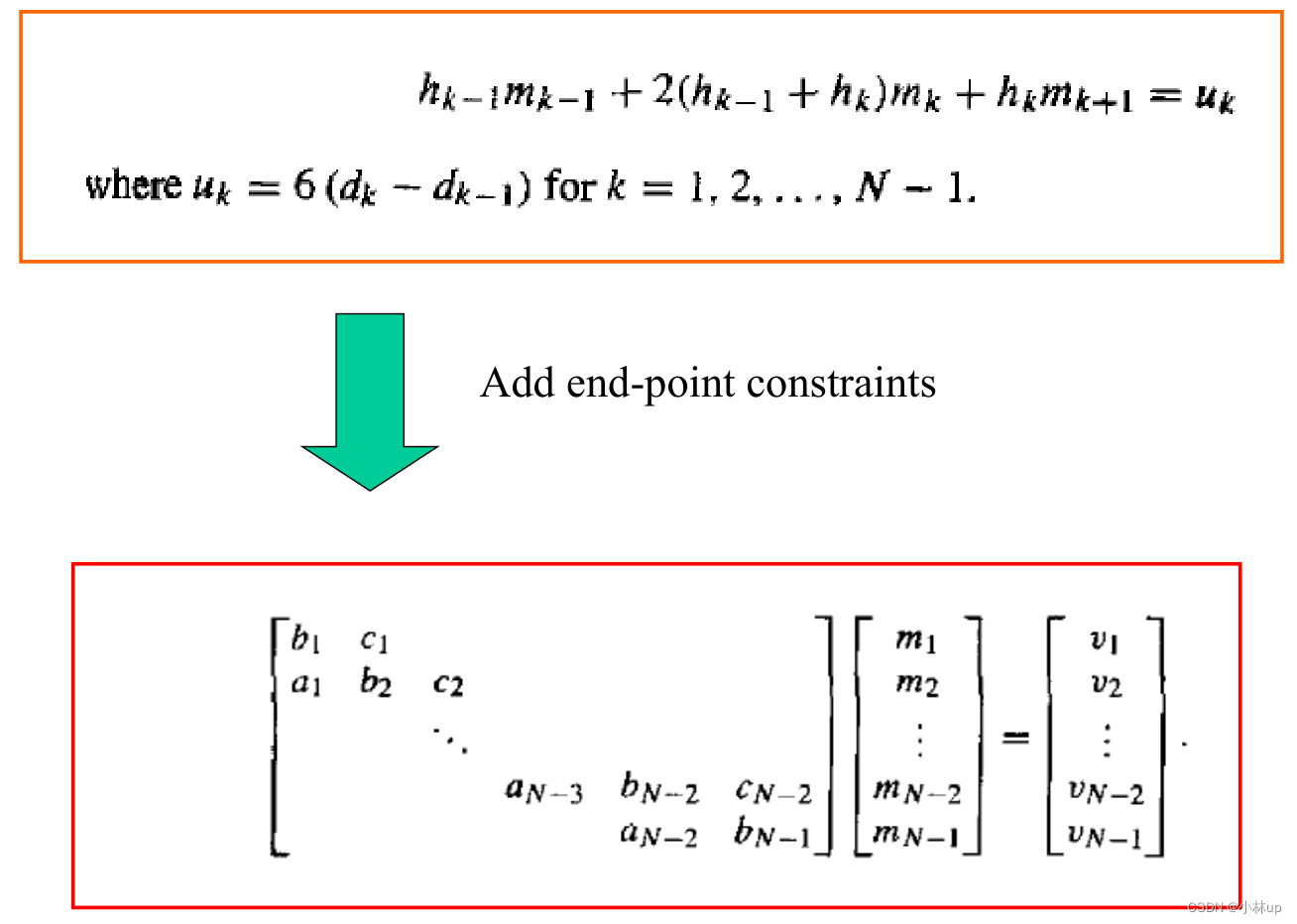
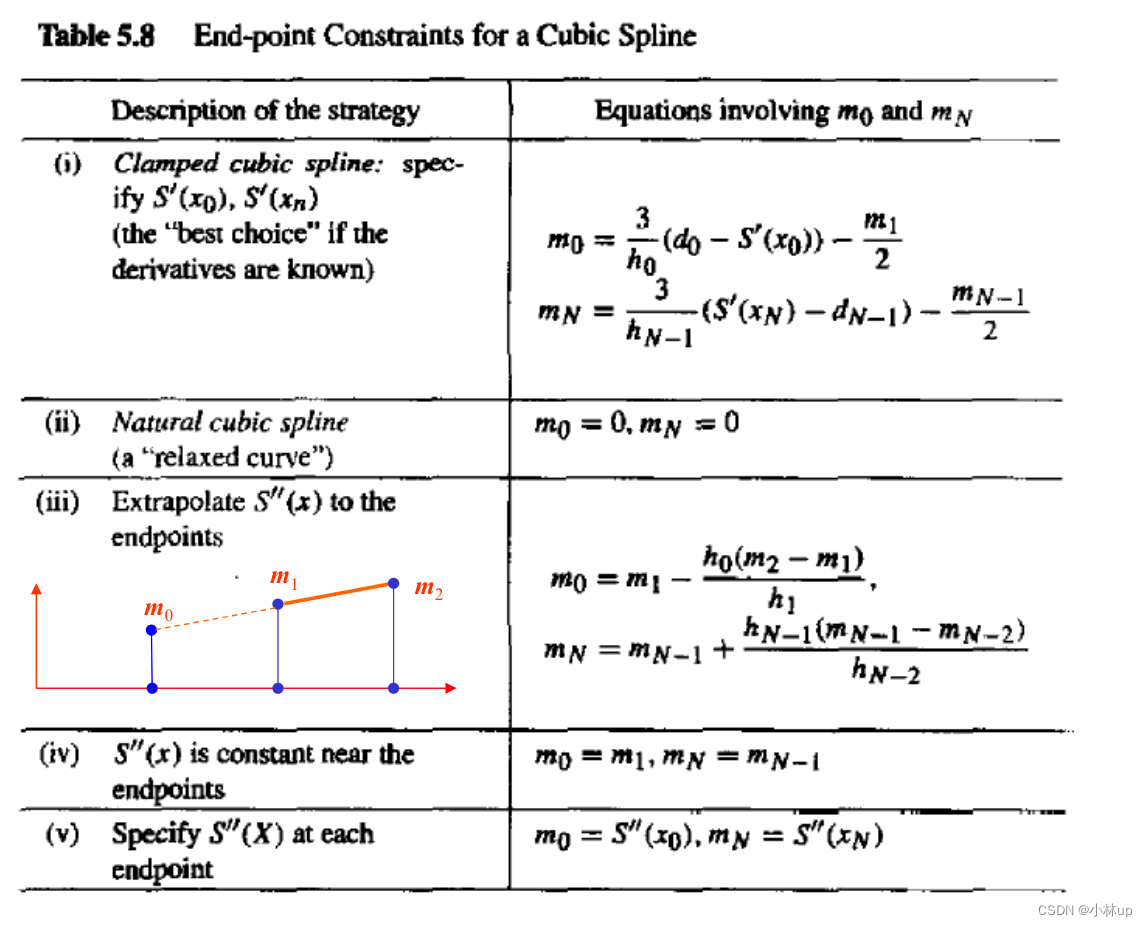
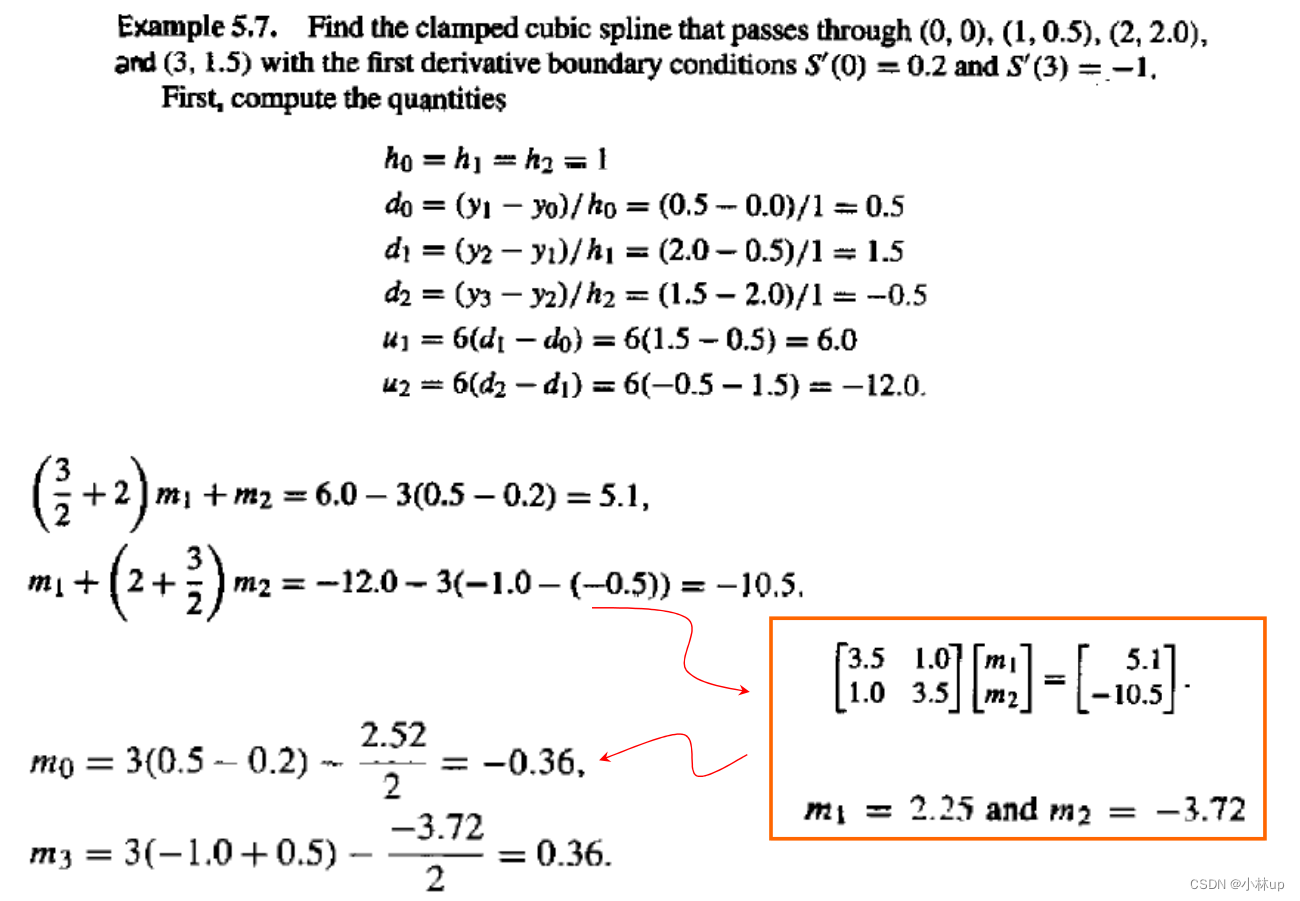
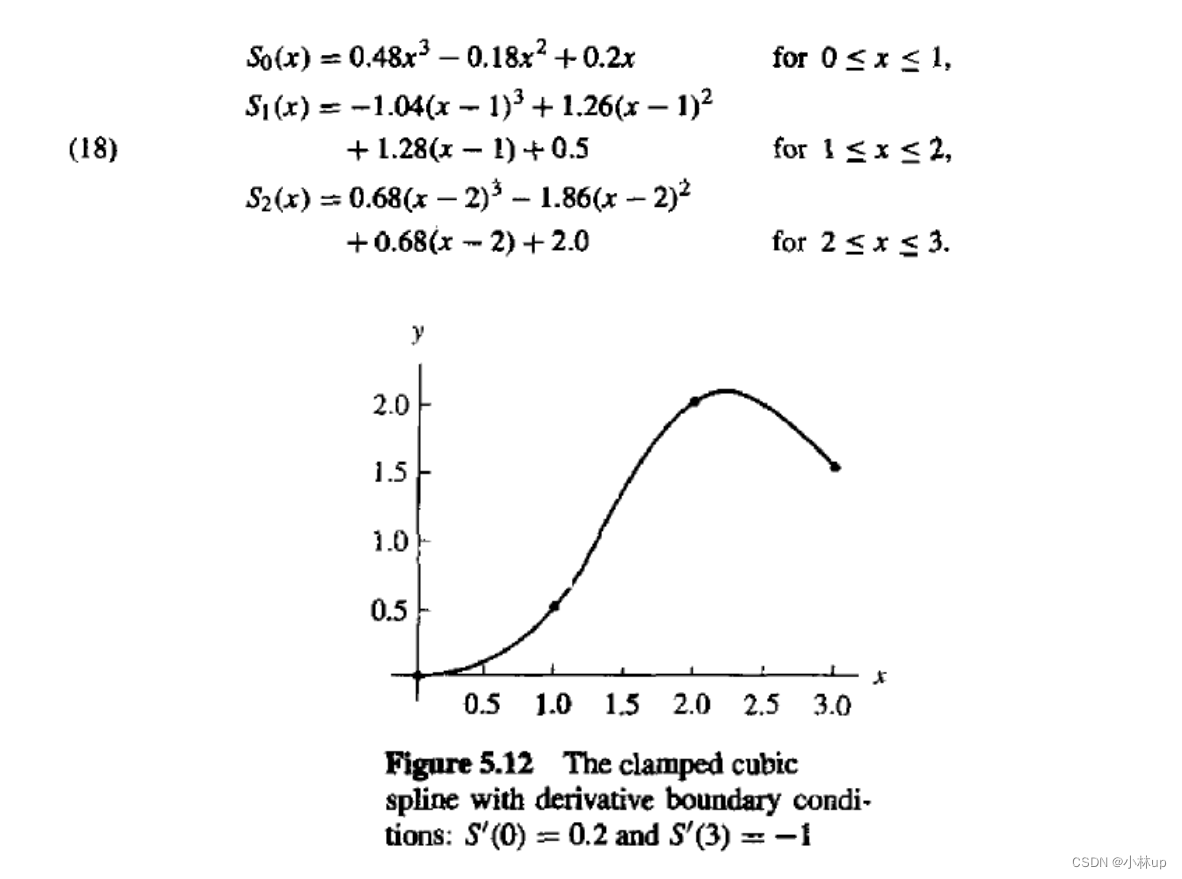
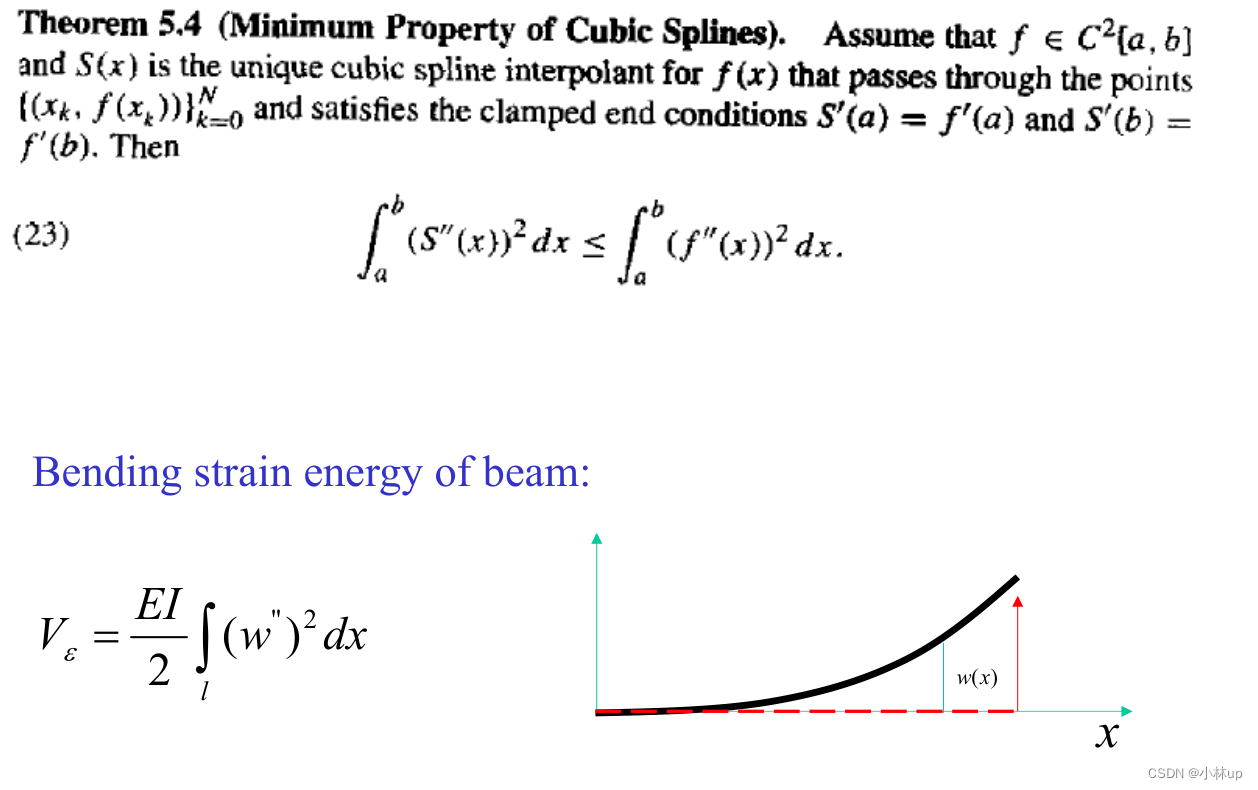
3.6 分段三次样条曲线拟合
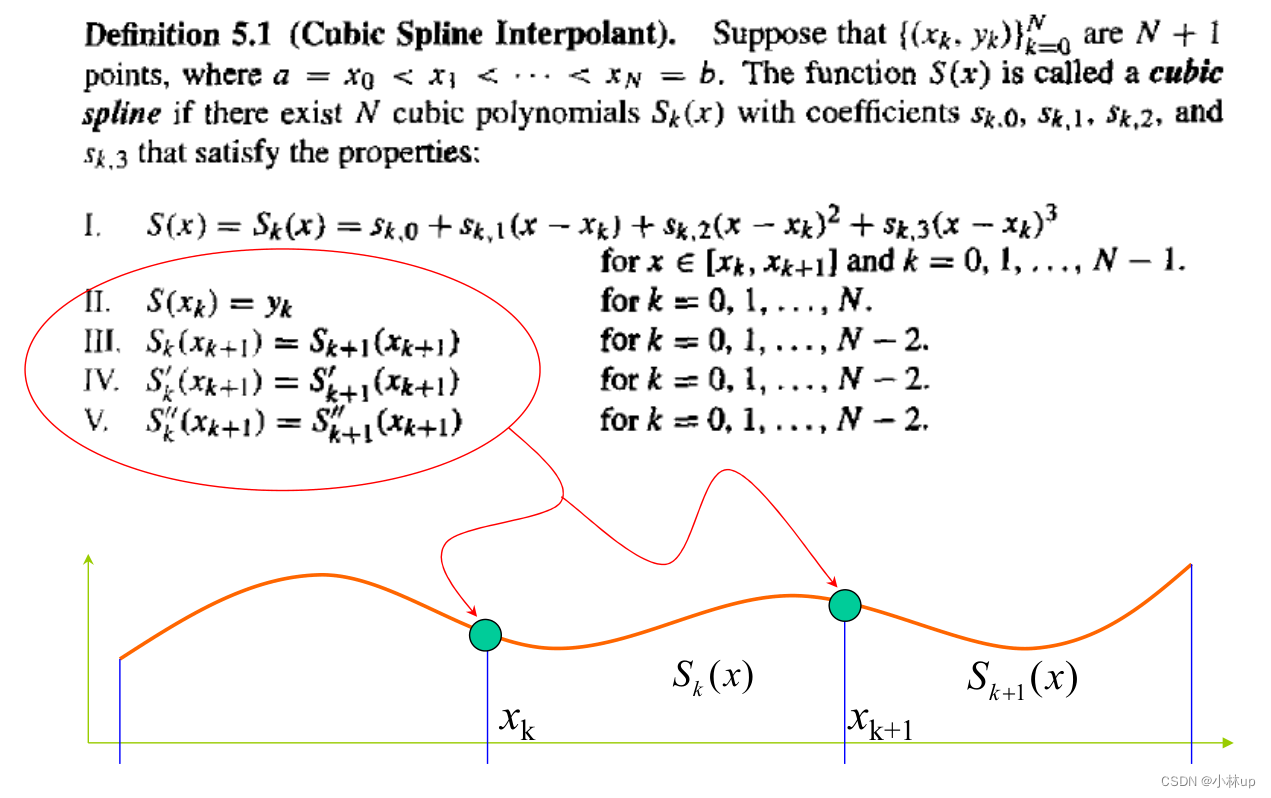
过点、0阶、1阶、2阶连续,四个条件约束的三次曲线。
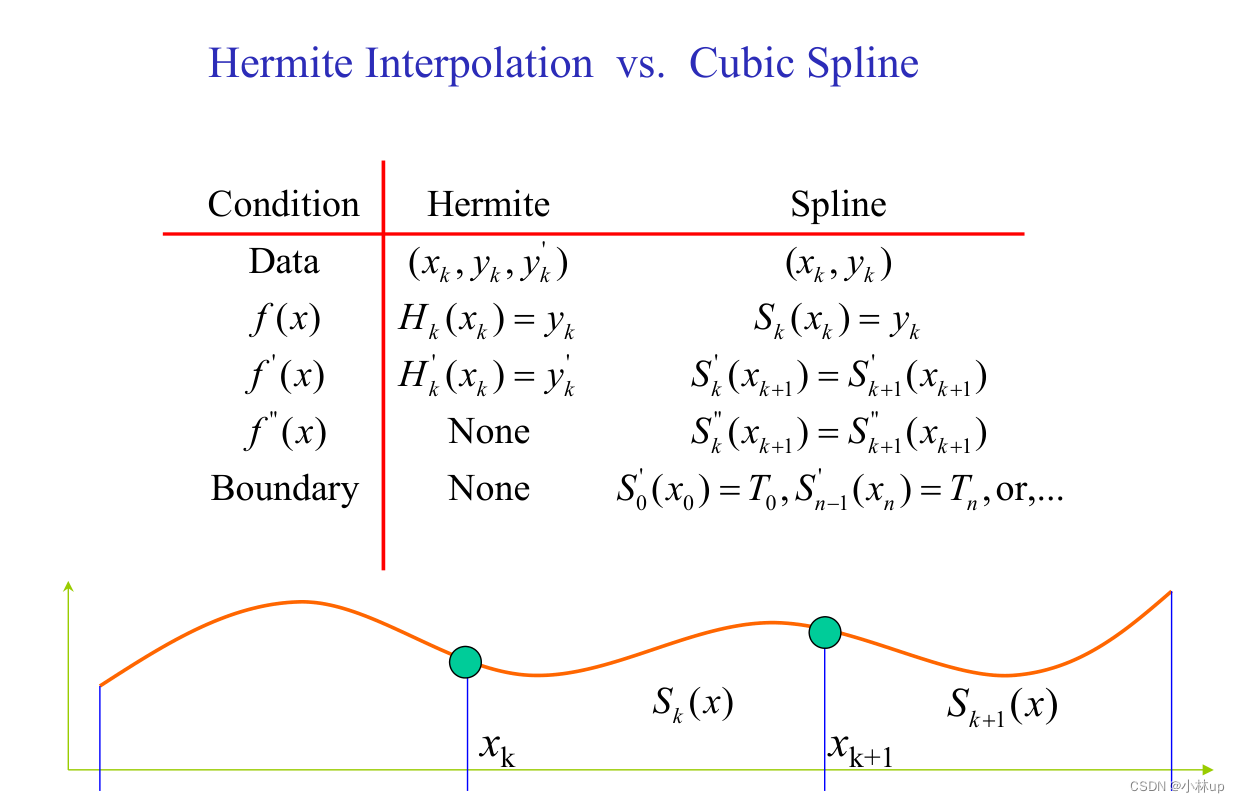
和Hermite插值比较:
例子:
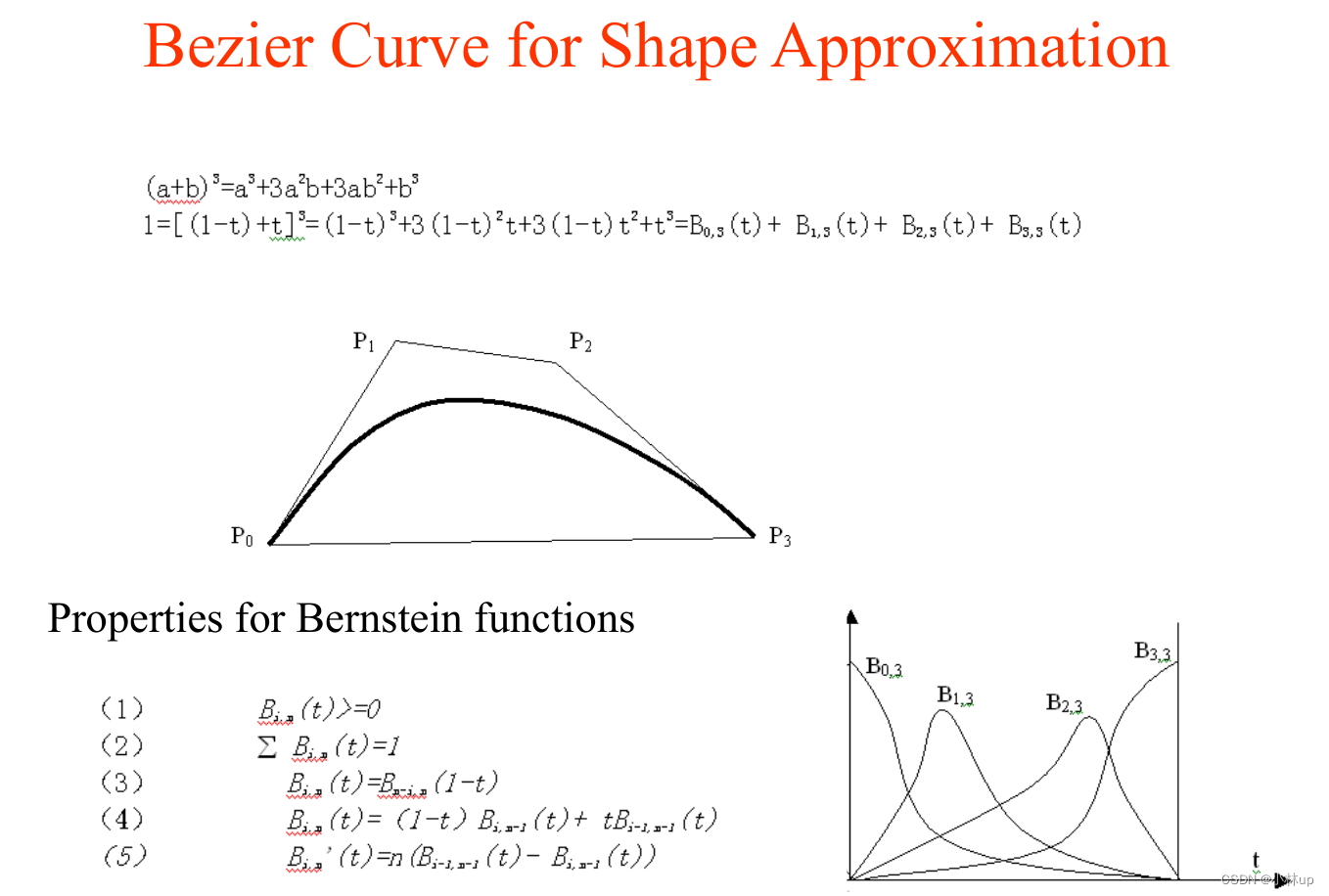
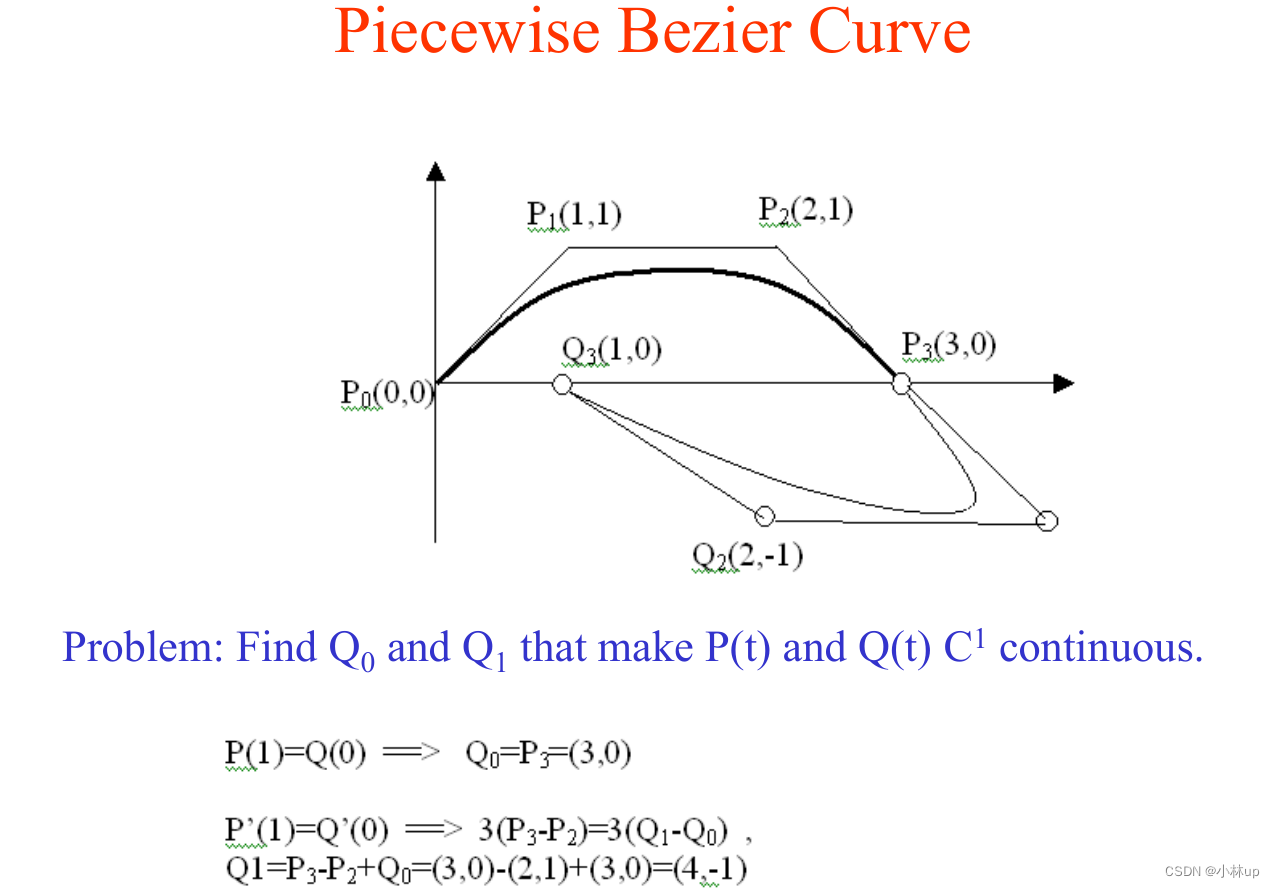
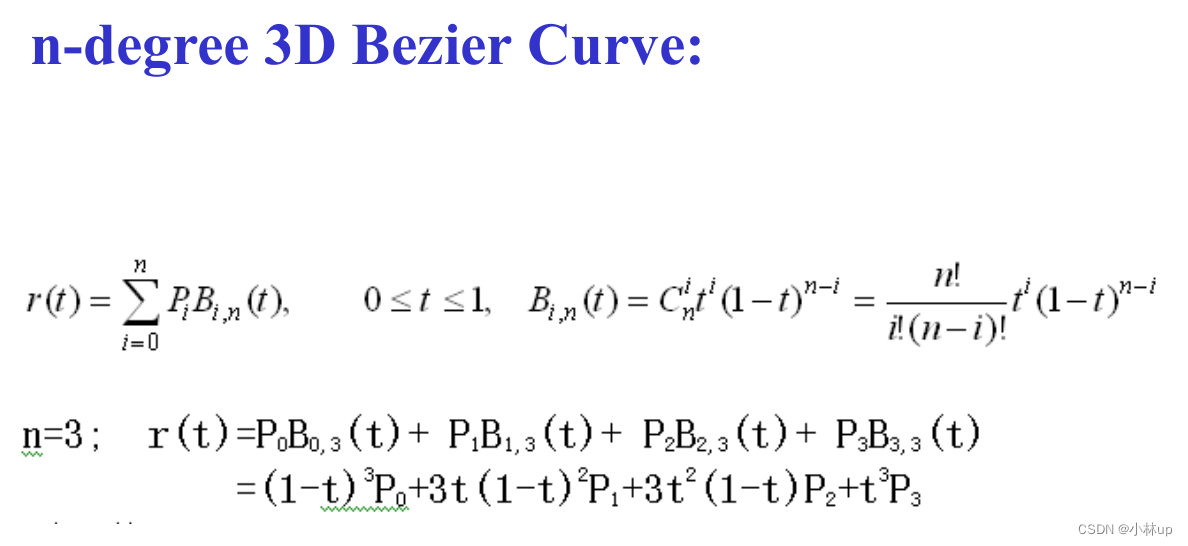
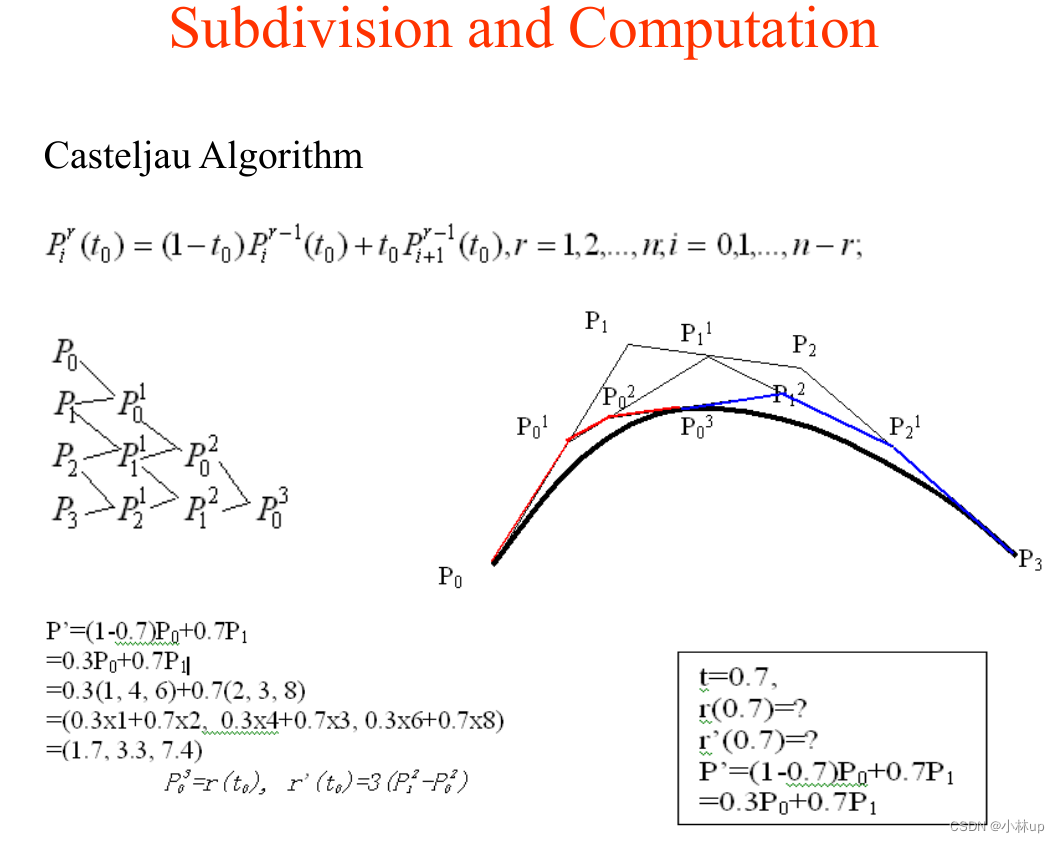
3.7 Bezier曲线拟合
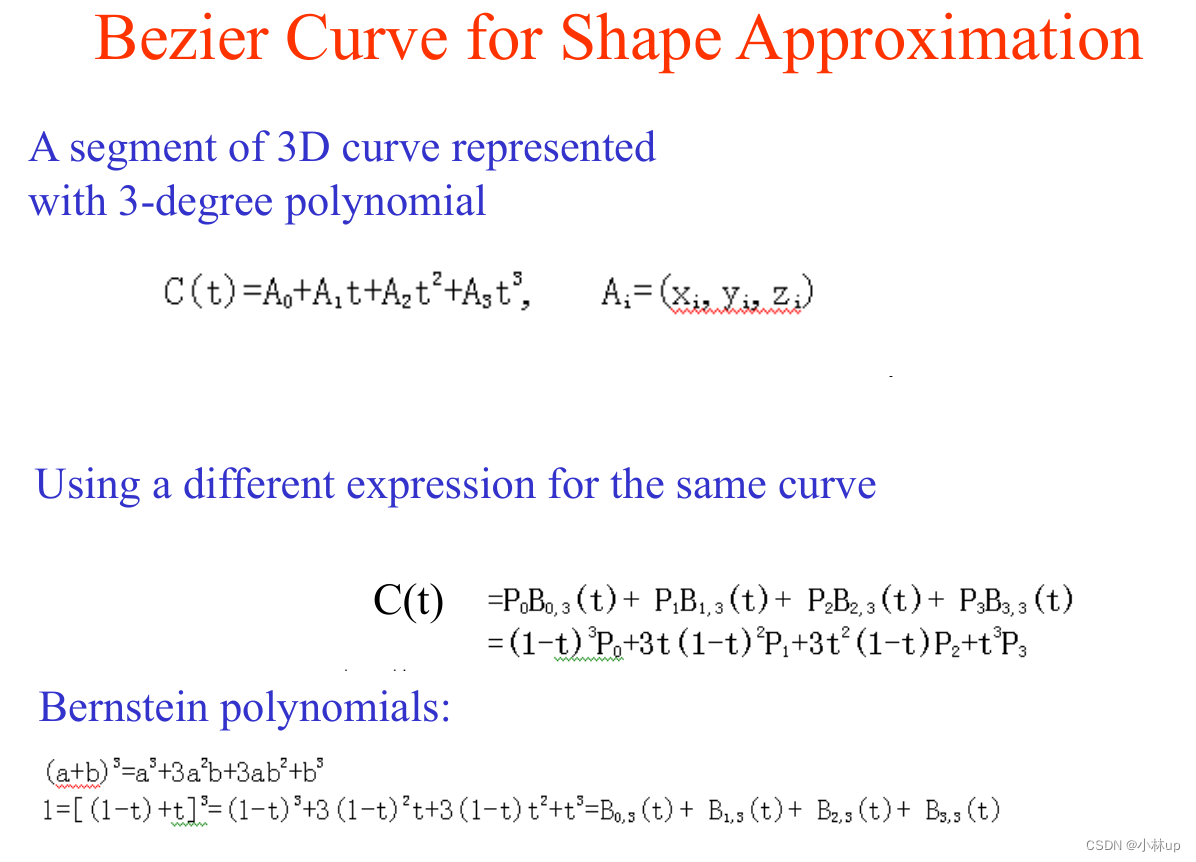
3.8 Matlab函数