RK3566添加一款温湿度传感器gxht3x.挂在i2c总线下。驱动部分就不多做解析。大致流程硬件接好i2c线以及vcc gnd。后看数据手册。初始化寄存器,然后要读数据的话读那个寄存器,读出来的数据要做一个转化,然后实现open read write ioctl函数就行了。本文主要讲解hal层 。直接贴驱动代码。
/* drivers/input/sensors/temperature/tmp_ms5607.c
*
* Copyright (C) 2012-2015 ROCKCHIP.
* Author: luowei <lw@rock-chips.com>
*
* This software is licensed under the terms of the GNU General Public
* License version 2, as published by the Free Software Foundation, and
* may be copied, distributed, and modified under those terms.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
*/
#include <linux/init.h>
#include <linux/module.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/slab.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/of_gpio.h>
#include <linux/i2c.h>
#include <asm/io.h>
#include <asm/uaccess.h>
#include <linux/miscdevice.h>
#include <linux/gpio.h>
#include <linux/uaccess.h>
#include <asm/atomic.h>
#include <linux/delay.h>
#include <linux/freezer.h>
#ifdef CONFIG_HAS_EARLYSUSPEND
#include <linux/earlysuspend.h>
#endif
#include <linux/sensor-dev.h>
static int sensor_active(struct i2c_client *client, int enable, int rate)
{
int result = 0;
return result;
}
static int sensor_init(struct i2c_client *client)
{
int result = 0;
return result;
}
static int sensor_i2c_write(struct i2c_client *client,
unsigned int len, unsigned char const *data)
{
struct i2c_msg msgs[1];
int res;
msgs[0].addr = 0x44;
msgs[0].flags = 0; /* write */
msgs[0].buf = (unsigned char *)data;
msgs[0].len = len;
res = i2c_transfer(client->adapter, msgs, 1);
printk("wzf---i2c_transfer count = %d\n", res);
return res;
}
static int senosr_i2c_read(struct i2c_client *client,
unsigned int len, unsigned char *data)
{
struct i2c_msg msgs[1];
int res;
printk("wzf:-----addr = %x-----\n",(int)client->addr);
msgs[0].addr = 0x44;
msgs[0].flags = I2C_M_RD;
msgs[0].buf = data;
msgs[0].len = len;
res = i2c_transfer(client->adapter, msgs, 1);
printk("wzf---i2c_transfer count = %d\n", res);
return res;
}
static int humidity_report_value(struct input_dev *input, int data)
{
//get temperature, high and temperature from register data
printk("ms5607-----hum report data= %d\n",data);
input_report_abs(input, ABS_VOLUME, data);
input_sync(input);
msleep(100);
return 0;
}
static int sensor_report_value(struct i2c_client *client)
{
int ret = 0;
unsigned int tem = 0,hum = 0;
int Temperature=0,Humidity=0;
char recvbuffer[6];
char sendbuffer[2] = {0x2C,0x10};
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
printk("wzf:--------%s---------\n",__func__);
memset(recvbuffer, 0, 6);
ret = sensor_i2c_write(client, 2, sendbuffer);
if (!ret){
printk("sensor_i2c_read failed!\n");
//return -1;
}
msleep(2);
ret = senosr_i2c_read(client, 6, recvbuffer);
if (!ret){
printk("sensor_i2c_read failed!\n");
//return -1;
}
printk("read recvbuffer= %s-----\n",recvbuffer);
tem = ((recvbuffer[0]<<8) | recvbuffer[1]);//温度拼接
hum = ((recvbuffer[3]<<8) | recvbuffer[4]);//湿度拼接
printk("wzf:ms5607 hum =%d\n",hum);
printk("wzf:ms5607 temp =%d\n",tem);
/*转换实际温度*/
Temperature= (175* tem/65535-45) ;// T = -45 + 175 * tem / (2^16-1)
//Temperature =(315*tem/65535-49);
Humidity= (100* hum/65535);// RH = hum*100 / (2^16-1)
printk("---Temp : %d Hum: %d ----\n",Temperature,Humidity);
//Humidity=950;
if(!Humidity)
return 0;
ret = humidity_report_value(sensor->input_dev, Humidity);
return 0;
}
struct sensor_operate humidity_gxht3x_ops = {
.name = "hum_gxht3x",
.type = SENSOR_TYPE_HUMIDITY, //sensor type and it should be correct
.id_i2c = HUMIDITY_ID_GXHT3X, //i2c id number
.read_reg = SENSOR_UNKNOW_DATA, //read data
.read_len = 2, //data length
.id_reg = SENSOR_UNKNOW_DATA, //read device id from this register
.id_data = SENSOR_UNKNOW_DATA, //device id
.precision = 16, //8 bits
.ctrl_reg = SENSOR_UNKNOW_DATA, //enable or disable
.int_status_reg = SENSOR_UNKNOW_DATA, //intterupt status register
.range = {0,65535}, //range
.trig = IRQF_TRIGGER_LOW | IRQF_ONESHOT | IRQF_SHARED,
.active = sensor_active,
.init = sensor_init,
.report = sensor_report_value,
};
/****************operate according to sensor chip:end************/
static int humidity_gxht3x_probe(struct i2c_client *client, const struct i2c_device_id *devid)
{
printk("wzf:----%s----\n",__func__);
return sensor_register_device(client, NULL, devid, &humidity_gxht3x_ops);
}
static int humidity_gxht3x_remove(struct i2c_client *client)
{
return sensor_unregister_device(client, NULL, &humidity_gxht3x_ops);
}
static const struct i2c_device_id humidity_gxht3x_id[] = {
{"hum_gxht3x", HUMIDITY_ID_GXHT3X},
{}
};
static struct i2c_driver humidity_ms5607_driver = {
.probe = humidity_gxht3x_probe,
.remove = humidity_gxht3x_remove,
.shutdown = sensor_shutdown,
.id_table = humidity_gxht3x_id,
.driver = {
.name = "humidity_gxht3x",
#ifdef CONFIG_PM
.pm = &sensor_pm_ops,
#endif
},
};
module_i2c_driver(humidity_ms5607_driver);
MODULE_AUTHOR("luowei <lw@rock-chips.com>");
MODULE_DESCRIPTION("ms5607 temperature driver");
MODULE_LICENSE("GPL");
接下来对hal层进行浅析hal对于驱动来说还是要会的。我也不会,在网上找资料找出来的如有错误希望各位大佬能指出。
以上资料来自博主~未来可期点击看大佬的文章
总结一下:
对于我们的湿度传感器来说:(kernel 层驱动通过i2c读取寄存器拿到湿度数据) —fileoperation---->(hardware层通过open节点,以及ioctl获取到数据,填充这些结构体.hw_device_t 填充模块ID 名称 描述 版本等信息。hw_moule_ts实现功能函数。等jni层获取到该结构体指针的时候可以调用这些功能函数)------jni-------->(framewark层注册java native interface.java本地接口,以便上层调用)------->apk.
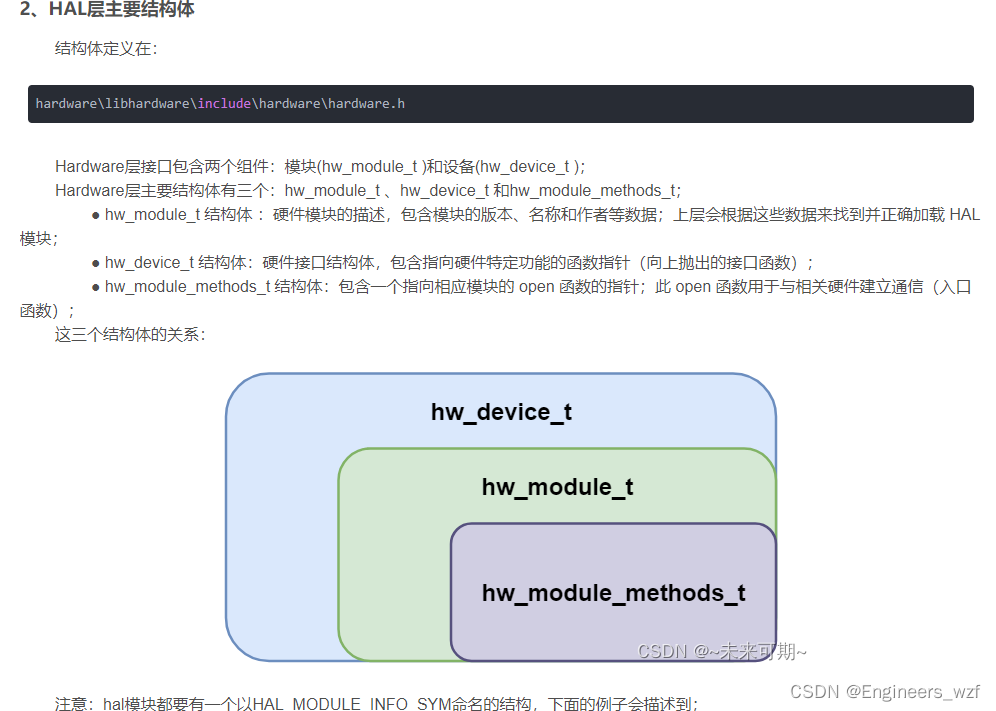
那我们看hal层代码就先从这三个结构体入手。
hardware\libhardware\include\hardware\hardware.h
struct hw_module_t;
struct hw_module_methods_t;
struct hw_device_t;
/**
* Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
* and the fields of this data structure must begin with hw_module_t
* followed by module specific information.
*/
typedef struct hw_module_t {
/** tag must be initialized to HARDWARE_MODULE_TAG */
uint32_t tag;
/**
* The API version of the implemented module. The module owner is
* responsible for updating the version when a module interface has
* changed.
*
* The derived modules such as gralloc and audio own and manage this field.
* The module user must interpret the version field to decide whether or
* not to inter-operate with the supplied module implementation.
* For example, SurfaceFlinger is responsible for making sure that
* it knows how to manage different versions of the gralloc-module API,
* and AudioFlinger must know how to do the same for audio-module API.
*
* The module API version should include a major and a minor component.
* For example, version 1.0 could be represented as 0x0100. This format
* implies that versions 0x0100-0x01ff are all API-compatible.
*
* In the future, libhardware will expose a hw_get_module_version()
* (or equivalent) function that will take minimum/maximum supported
* versions as arguments and would be able to reject modules with
* versions outside of the supplied range.
*/
uint16_t module_api_version;
#define version_major module_api_version
/**
* version_major/version_minor defines are supplied here for temporary
* source code compatibility. They will be removed in the next version.
* ALL clients must convert to the new version format.
*/
/**
* The API version of the HAL module interface. This is meant to
* version the hw_module_t, hw_module_methods_t, and hw_device_t
* structures and definitions.
*
* The HAL interface owns this field. Module users/implementations
* must NOT rely on this value for version information.
*
* Presently, 0 is the only valid value.
*/
uint16_t hal_api_version;
#define version_minor hal_api_version
/** Identifier of module */
const char *id;
/** Name of this module */
const char *name;
/** Author/owner/implementor of the module */
const char *author;
/** Modules methods */
struct hw_module_methods_t* methods;
/** module's dso */
void* dso;
#ifdef __LP64__
uint64_t reserved[32-7];
#else
/** padding to 128 bytes, reserved for future use */
uint32_t reserved[32-7];
#endif
} hw_module_t;
typedef struct hw_module_methods_t {
/** Open a specific device */
int (*open)(const struct hw_module_t* module, const char* id,
struct hw_device_t** device);
} hw_module_methods_t;
/**
* Every device data structure must begin with hw_device_t
* followed by module specific public methods and attributes.
*/
typedef struct hw_device_t {
/** tag must be initialized to HARDWARE_DEVICE_TAG */
uint32_t tag;
/**
* Version of the module-specific device API. This value is used by
* the derived-module user to manage different device implementations.
*
* The module user is responsible for checking the module_api_version
* and device version fields to ensure that the user is capable of
* communicating with the specific module implementation.
*
* One module can support multiple devices with different versions. This
* can be useful when a device interface changes in an incompatible way
* but it is still necessary to support older implementations at the same
* time. One such example is the Camera 2.0 API.
*
* This field is interpreted by the module user and is ignored by the
* HAL interface itself.
*/
uint32_t version;
/** reference to the module this device belongs to */
struct hw_module_t* module;
/** padding reserved for future use */
#ifdef __LP64__
uint64_t reserved[12];
#else
uint32_t reserved[12];
#endif
/** Close this device */
int (*close)(struct hw_device_t* device);
} hw_device_t;
然后我们在看sensor中定义的结构体
\hardware\libhardware\include\hardware\sensors.h
/**
* Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
* and the fields of this data structure must begin with hw_module_t
* followed by module specific information.
*/
struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
/**
* Place the module in a specific mode. The following modes are defined
*
* 0 - Normal operation. Default state of the module.
* 1 - Loopback mode. Data is injected for the supported
* sensors by the sensor service in this mode.
* return 0 on success
* -EINVAL if requested mode is not supported
* -EPERM if operation is not allowed
*/
int (*set_operation_mode)(unsigned int mode);
};
/*
* sensors_poll_device_t is used with SENSORS_DEVICE_API_VERSION_0_1
* and is present for backward binary and source compatibility.
* See the Sensors HAL interface section for complete descriptions of the
* following functions:
* http://source.android.com/devices/sensors/index.html#hal
*/
struct sensors_poll_device_t {
struct hw_device_t common;
int (*activate)(struct sensors_poll_device_t *dev,
int sensor_handle, int enabled);
int (*setDelay)(struct sensors_poll_device_t *dev,
int sensor_handle, int64_t sampling_period_ns);
int (*poll)(struct sensors_poll_device_t *dev,
sensors_event_t* data, int count);
};
这里主要定义了俩个结构体 :struct sensors_module_t , 里面包含了 hw_module_t ; 那hw_module_t我们之前说是填充模块信息的包括ID 名称等等。但是它里面还包含了俩个函数 get_sensors_list 这个函数将返回所有可以的传感器列表。set_operation_mode:将模块设置特定模式:0 正常模式 1回环模式。第二个结构体:struct sensors_poll_device_t ,里面包含了struct hw_device_t;struct hw_device_t里面是特定的实现函数,但是我们还要增加我们自己的功能函数activate ,setDelay ,poll。
ok,我查看在libhardware下的头文件定义。接下来看具体的实现。
hardware\rockchip\sensor\st\sensors.c
/* sensors_module_t 填充hw_module_t的 模块描述 */
struct sensors_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.version_major = 1,
.version_minor = 0,
.id = SENSORS_HARDWARE_MODULE_ID,
.name = "Rockchip Sensors Module",
.author = "The RKdroid Project",
.methods = &sensors_module_methods,
},
.get_sensors_list = sensors__get_sensors_list
};
/* hw_module_methods_t 实现open函数 */
static struct hw_module_methods_t sensors_module_methods = {
.open = open_sensors
};
/* 实现sensor.h中 sensors_module_t结构体中 get_sensors_list函数 */
static int sensors__get_sensors_list(struct sensors_module_t* module,
struct sensor_t const** list)
{
*list = sSensorList;
return ARRAY_SIZE(sSensorList);
}
那么sensors_poll_device_t的几个函数的实现都没有写???这个要看具体设备再具体实现。
直接看湿度传感器hal层结构体定义。
hardware\rockchip\sensor\st\HumiditySensor.h
class HumiditySensor : public SensorBase {
int mEnabled;
InputEventCircularReader mInputReader;
sensors_event_t mPendingEvent;
bool mHasPendingEvent;
int setInitialState();
public:
HumiditySensor();
virtual ~HumiditySensor();
virtual int setDelay(int32_t handle, int64_t ns);
virtual int enable(int32_t handle, int enabled);
virtual int readEvents(sensors_event_t* data, int count);
virtual bool hasPendingEvents() const;
virtual int isActivated(int handle);
void processEvent(int code, int value);
};
/*****************************************************************************/
#define HUMIDITY_IOCTL_MAGIC 'h'
#define HUMIDITY_IOCTL_GET_ENABLED _IOR(HUMIDITY_IOCTL_MAGIC, 1, int *)
#define HUMIDITY_IOCTL_ENABLE _IOW(HUMIDITY_IOCTL_MAGIC, 2, int *)
#define HUMIDITY_IOCTL_DISABLE _IOW(HUMIDITY_IOCTL_MAGIC, 3, int *)
#define HUMIDITY_IOCTL_SET_DELAY _IOW(HUMIDITY_IOCTL_MAGIC, 4, int *)
class HumiditySensor : public SensorBase ; 可以看出class HumiditySensor 继承了SensorBase,那我们看一下class SensorBase
struct sensors_event_t;
class SensorBase {
protected:
const char* dev_name;
const char* data_name;
int dev_fd;
int data_fd;
static int openInput(const char* inputName);
static int64_t getTimestamp();
static int64_t timevalToNano(timeval const& t) {
return t.tv_sec*1000000000LL + t.tv_usec*1000;
}
int open_device();
int close_device();
public:
SensorBase(
const char* dev_name,
const char* data_name);
virtual ~SensorBase();
virtual int readEvents(sensors_event_t* data, int count) = 0;
virtual bool hasPendingEvents() const;
virtual int getFd() const;
virtual int setDelay(int32_t handle, int64_t ns);
virtual int enable(int32_t handle, int enabled) = 0;
virtual int isActivated(int handle);
};
这里的setdelay isActivated readEvents不就是sensors_poll_device_t里面的功能实现函数。同时在HumiditySensor类里面也实现了这几个函数。查看class HumiditySensor里面成员的实现。
/*
* Copyright (C) 2010 Motorola, Inc.
* Copyright (C) 2008 The Android Open Source Project
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include <fcntl.h>
#include <errno.h>
#include <math.h>
#include <poll.h>
#include <unistd.h>
#include <dirent.h>
#include <sys/select.h>
#include "HumiditySensor.h"
/*****************************************************************************/
HumiditySensor::HumiditySensor()
: SensorBase(HUM_DEVICE_NAME, "humidity"),
mEnabled(0),
mInputReader(32),
mHasPendingEvent(false)
{
LOGD("new class humidity");
mPendingEvent.version = sizeof(sensors_event_t);
mPendingEvent.sensor = ID_HUM;
mPendingEvent.type = SENSOR_TYPE_RELATIVE_HUMIDITY;
memset(mPendingEvent.data, 0, sizeof(mPendingEvent.data));
open_device();
int flags = 0;
if ((dev_fd > 0) && (!ioctl(dev_fd, HUMIDITY_IOCTL_GET_ENABLED, &flags))) {
if (flags) {
mEnabled = 1;
setInitialState();
}
}
}
HumiditySensor::~HumiditySensor() {
LOGD("delete class humidity");
if (dev_fd > 0) {
close(dev_fd);
dev_fd = -1;
}
}
int HumiditySensor::setInitialState() {
struct input_absinfo absinfo;
if ((data_fd > 0) && !ioctl(data_fd, EVIOCGABS(EVENT_TYPE_HUMIDITY), &absinfo)) {
mHasPendingEvent = true;
mPendingEvent.relative_humidity = CONVERT_B * absinfo.value;
}
return 0;
}
int HumiditySensor::enable(int32_t, int en) {
int flags = en ? 1 : 0;
int err = 0;
if (flags != mEnabled) {
if (dev_fd < 0) {
open_device();
}
err = ioctl(dev_fd, HUMIDITY_IOCTL_ENABLE, &flags);
err = err<0 ? -errno : 0;
LOGE_IF(err, "HUMIDITY_IOCTL_ENABLE failed (%s)", strerror(-err));
if (!err) {
mEnabled = en ? 1 : 0;
if (en) {
setInitialState();
}
}
}
return err;
}
bool HumiditySensor::hasPendingEvents() const {
return mHasPendingEvent;
}
int HumiditySensor::setDelay(int32_t handle, int64_t ns)
{
if (ns < 0)
return -EINVAL;
if (dev_fd < 0) {
open_device();
}
int delay = ns / 1000000;
if (ioctl(dev_fd, HUMIDITY_IOCTL_SET_DELAY, &delay)) {
return -errno;
}
return 0;
}
int HumiditySensor::isActivated(int /* handle */)
{
return mEnabled;
}
int HumiditySensor::readEvents(sensors_event_t* data, int count)
{
if (count < 1)
return -EINVAL;
if (mHasPendingEvent) {
mHasPendingEvent = false;
mPendingEvent.timestamp = getTimestamp();
*data = mPendingEvent;
return mEnabled ? 1 : 0;
}
ssize_t n = mInputReader.fill(data_fd);
if (n < 0)
return n;
int numEventReceived = 0;
input_event const* event;
while (count && mInputReader.readEvent(&event)) {
int type = event->type;
if (type == EV_ABS) {
processEvent(event->code, event->value);
} else if (type == EV_SYN) {
int64_t time = timevalToNano(event->time);
mPendingEvent.timestamp = time;
if (mEnabled) {
*data++ = mPendingEvent;
count--;
numEventReceived++;
}
} else {
ALOGE("HumiditySensor: unknown event (type=%d, code=%d)",
type, event->code);
}
mInputReader.next();
}
return numEventReceived;
}
void HumiditySensor::processEvent(int code, int value)
{
if (code == EVENT_TYPE_HUMIDITY) {
//mPendingEvent.relative_humidity = value * CONVERT_B ;
mPendingEvent.relative_humidity = value;
LOGD("HUM---%s:value=%d\n",__FUNCTION__, value);
LOGD("HUM---%s:value * CONVERT_B = %f\n",__FUNCTION__, mPendingEvent.relative_humidity);
}
}
里面的核心函数就是open 然后ioctl发送不同的魔数去获取到数据。那么我们的hal层拿到数据只是完成了启下作用,即从内核驱动中获取数据。那么我们还要把数据给到JNI。由于hal层和farmware层都是运行在用户空间,jni也是由C/C++编写。并且hal层是以.so的动态库文件的形式存在。那么我们只要在jni包含该库文件就可以。调用到我们的功能函数。
![[学习笔记]Rocket.Chat业务数据备份](https://img-blog.csdnimg.cn/05667788aec6465fbe8379ee7227c161.png)