交流群 | 进“传感器群/滑板底盘群”请加微信号:xsh041388
交流群 | 进“汽车基础软件群”请加微信号:Faye_chloe
备注信息:群名称 + 真实姓名、公司、岗位
作者 | 许良
定位是高等级自动驾驶的基础,但在高速NOA和城区NOA等场景中,如何能够稳定地在各种工况下实现高精度定位将是个难题。一个常见的问题是:高速NOA、城区NOA功能需要实现多高精度的定位?需要多高精度的IMU、组合导航和多少种传感器?
带着这些困惑,笔者采访了很多行业内专家。
第一个问题的答案较为一致:高速NOA只需要实现车道级/分米级的定位即可,能识别出自车在哪个车道就够了;而城区NOA下,由于车道比较窄,尤其是在十字路口处,经常会出现车道变化,如两车道变成三车道或四车道,这时候要想实现车道保持而不压到车道线,就需要定位精度达到厘米级。
关于第二个问题“需要多高精度的IMU、组合导航和传感器”,笔者和行业多位专家交流后得到的结论是:无法确定,因为最终的定位精度是由组合导航、轮速传感器、高精地图和视觉、激光雷达、毫米波等多种传感器匹配定位后的结果,只要最终融合定位的精度能满足需求即可,对各部分的精度不做硬性要求。
下图介绍了融合定位的几个组成部分。
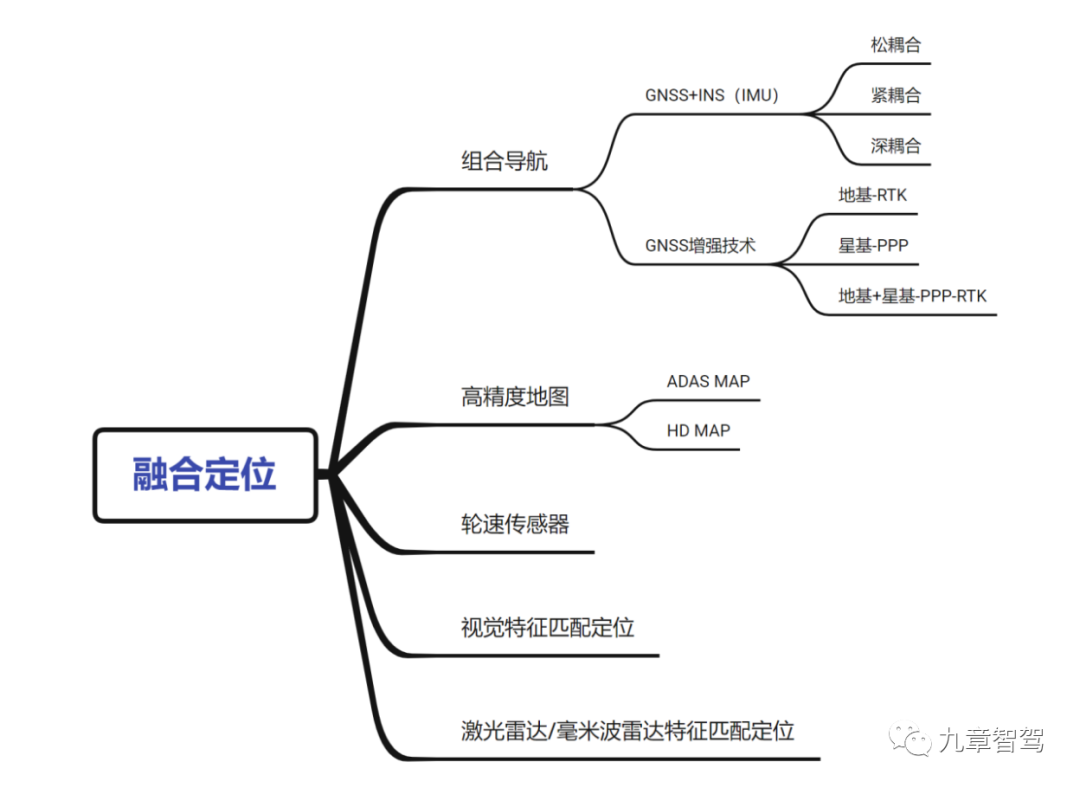
组合导航,广义上指“两种或两种以上的非相似导航定位系统的结合”,如通过算法对GNSS、IMU、轮速计、Lidar点云等信息做数据融合。
由于GNSS和IMU具有很好的互补效果,即GNSS补充了IMU惯性系统的累计误差问题,IMU很好地弥补了GNSS卫星系统的不稳定性和易受干扰性,这对“黄金搭档”也被称为最佳的组合导航方案,所以一般大家提到“组合导航”时,就指卫惯组合导航(GNSS+IMU)。如无特殊说明,下文中提到的“组合导航”即指GNSS+IMU。
本文主要重点关注如下几个问题——
一.GNSS为什么一定要双频?
目前,国内主流方案的GNSS/RTK都支持双频多星座。
所谓多星座,指的是GNSS接收机可以接收中国的北斗、美国的GPS和欧洲的伽利略等不同导航系统的信号,国内GNSS接收机一般同时支持北斗和GPS。
双频指的是每个导航系统都有两个载波频段,如北斗有两个频段,GPS也有两个频段。双频会导致硬件和算力成本大大增加。
那么,双频有什么作用呢?
和业内专家沟通下来,笔者得到答案是:一方面,两个载波频段可以互为冗余 ,另一方面,双频可以获得更高的定位精度。
在GNSS的测量误差中,电离层引起的误差占了很大一部分,而双频载波可以利用电离层对不同频率电磁波延迟的相关性,来消除大部分电离层引起的误差,从而大大提高卫星定位精度,这是单频GNSS所做不到的。
某位组合导航公司创始人曾论坛上公开提到,单频RTK定位精度,有95%的概率落在半径为0.4米的圆内(也就是精度单位CEP的概念),双频RTK定位精度可以做到95%的概率落在半径为0.2米的圆内,由此可见双频的重要性。
二.星基增强和地基增强
GNSS的定位误差,除了上文提到的电离层误差外,还有如下几种:卫星相关的卫星轨道误差(星历误差)、卫星原子钟的时钟误差、对流层误差、载波经过反射后的多径效应引起的误差,与接收机有关的接收机钟差等。
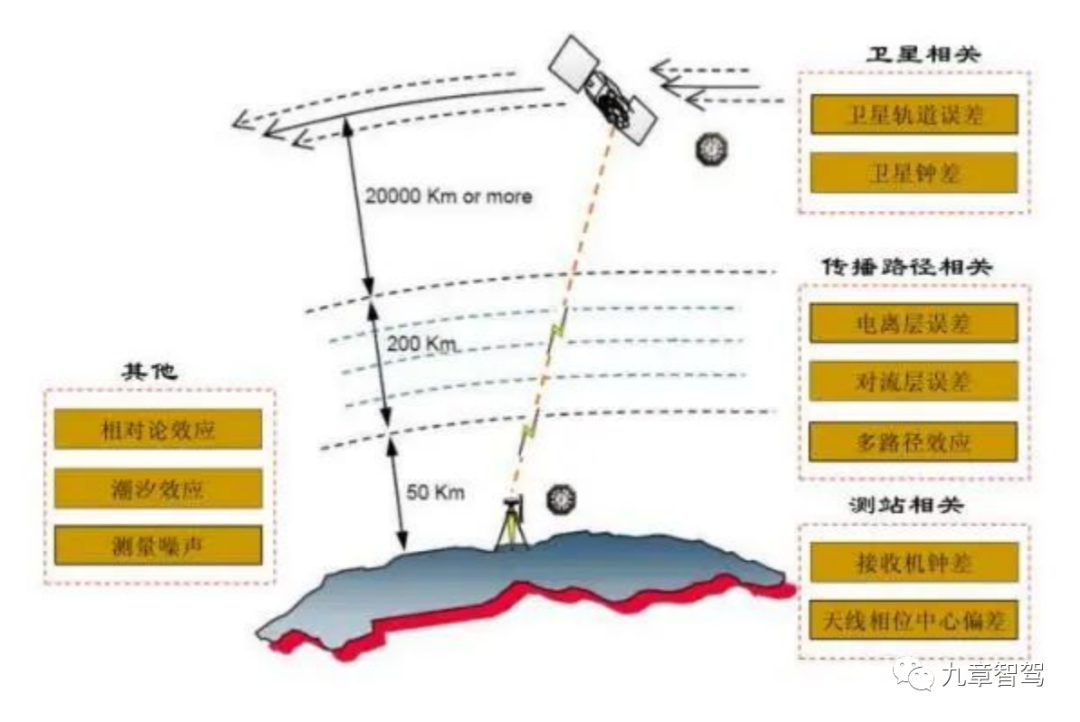
△卫星定位误差的来源
为了尽量消除这些误差,提高定位精度,除了上述提到的双频载波频段外,还有其他增强方法,根据其原理可以分为星基增强和地基增强。
其中使用最广泛、最具代表性的增强方法有地基RTK(Real-Time Kinematic,实时动态定位)、星基PPP(Precise Point Positioning,精密单点定位)和两者的结合PPP-RTK。具体技术介绍与优缺点如下所示:
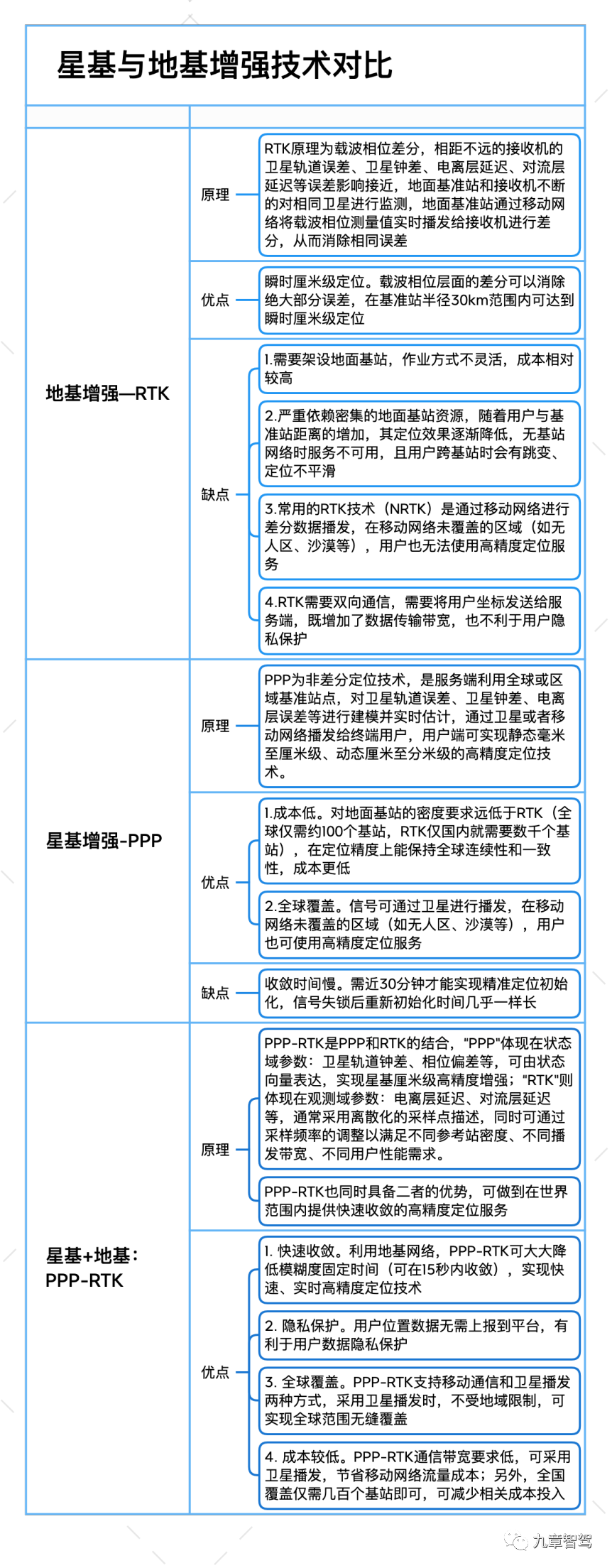
△RTK/PPP/PPP-RTK对比
信息来源:九章智驾根据公开信息与专家访谈信息整理
下图从收敛速度、定位精度、覆盖范围三个维度对这三种模式进行了对比。
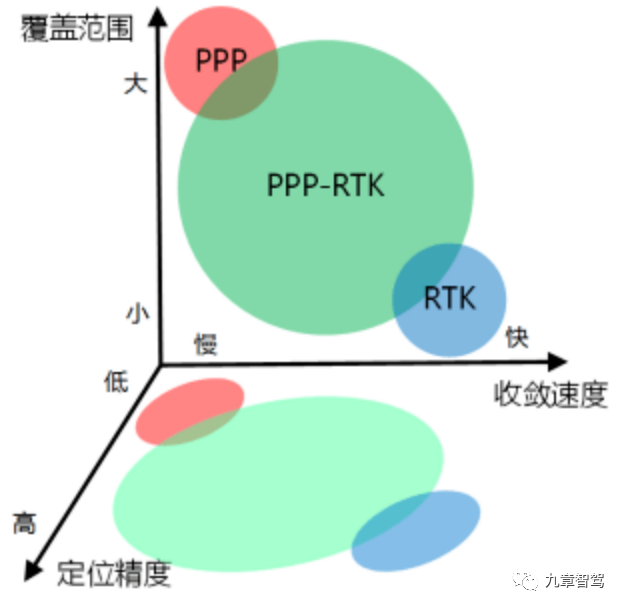
△RTK、PPP与PPP-RTK定位特点对比
(资料来源:https://www.sohu.com/a/447492212_120381558)
作为RTK和PPP的强强联合,PPP-RTK既有RTK精度高、收敛快的优点,也有PPP全球覆盖的优点。
除此之外,与RTK相比,PPP-RTK更符合功能安全的要求。一方面是PPP-RTK不受地面基站和移动网络覆盖面的约束(可以通过卫星播发);另一方面,相比于RTK通过差分把定位误差作为“黑盒”打包处理,PPP-RTK可以对每一项误差进行全球范围内的建模和预估,PPP-RTK的信号完好性使得它可以确认每个信号的误差状态,并识别该信号是否可收敛、可使用、可检测,从而更符合功能对风险因子逐项拆解的要求。
那么,与RTK相比,PPP-RTK的使用成本是否有优势呢?
虽然PPP-RTK所需的地面基站数量要少得多(国内数百个基站就可以覆盖),但如果要使用卫星播发信号,要么租借卫星,要么像时空道宇那样发射低轨卫星。据了解,租借卫星的成本不菲(约1000万~2000万/颗/年),而要覆盖全球得租借多个卫星才行,这些成本都会算在服务费中。
而据笔者和多位业内专家沟通交流,PPP-RTK和N-RTK的成本相差不大。如果不使用卫星播发的话,PPP-RTK成本还要更低一些。
业内很多专家都认为PPP-RTK是未来的发展趋势。据了解,国内已经有多个在研前装量产项目使用了PPP-RTK技术。
不过,有意思的是,已经在地基上有巨大投入的千寻位置也在向车企客户力推PPP-RTK(据千寻官网显示,千寻已建成2800+地基增强站),这是否受竞争对手的策略影响,不得不跟进?
那么,在转向PPP-RTK后, 先行者们在前期在地基增强基站上投入的资源是否会“浪费”?
笔者在和某头部位置服务商的资深从业者的沟通中获悉,虽然理论上PPP-RTK可以不需要那么多的地面基站,不过在收敛速度和位置精度方面,还是会受到地基数据很大的赋能,基于已有的高密度地基服务推出的PPP-RTK,其收敛速度也远快于地基密度没那么高的位置服务商的同类产品。
三.低轨卫星能提高定位精度吗?
前段时间,吉利旗下时空道宇发射了九颗低轨卫星,据称主要用于智能驾驶的高精定位等功能。同时,特斯拉的“星链”同样也是用低轨卫星覆盖全球。那么,低轨卫星真的能够提高定位精度吗?
在这个问题上,专家的反馈比较一致,即低轨卫星主要起到通讯的作用,对于提升定位精度并无实质作用。
不过,虽然低轨卫星不能提升定位精度,但的确可以对卫星信号起到增强覆盖的作用,尤其是在半遮挡地区。
某资深从业者认为,除了播发增强信号外,低轨卫星也可以同时使用全球卫星导航系统,播放载波信息,从而可以增加某个区域内GNSS接收机搜到的卫星数。一些半遮挡区域,如高架下,或楼宇内近窗处,之前由于搜不到足够多的导航卫星而无法定位或定位精度不准,加上低轨卫星后,就可以搜到足够多的卫星,从而增强卫星导航的可用性和可靠性。
四.IMU的关键指标和精度要求
IMU作为组合导航的核心器件,可以提供更高频率的高精信号(一般可达200Hz),在GNSS信号无效或者更新间隔内(GNSS信号频率为10Hz),可以用来进行高精度的航位推算。
IMU分为陀螺仪和加速度计两部分,陀螺仪输出车辆的横滚、俯仰和航向角,加速度计输出三个方向的加速度。
IMU的成本,随着精度的提升直线上升,毕竟“一分钱一分货”。
大家在选择IMU的时候,最常见的问题是:选多高精度的IMU才能满足要求?这就涉及到IMU的关键性能指标。
IMU有很多的器件指标,如零偏误差、比例因子误差、非线性误差等。具体指标及说明见下图。
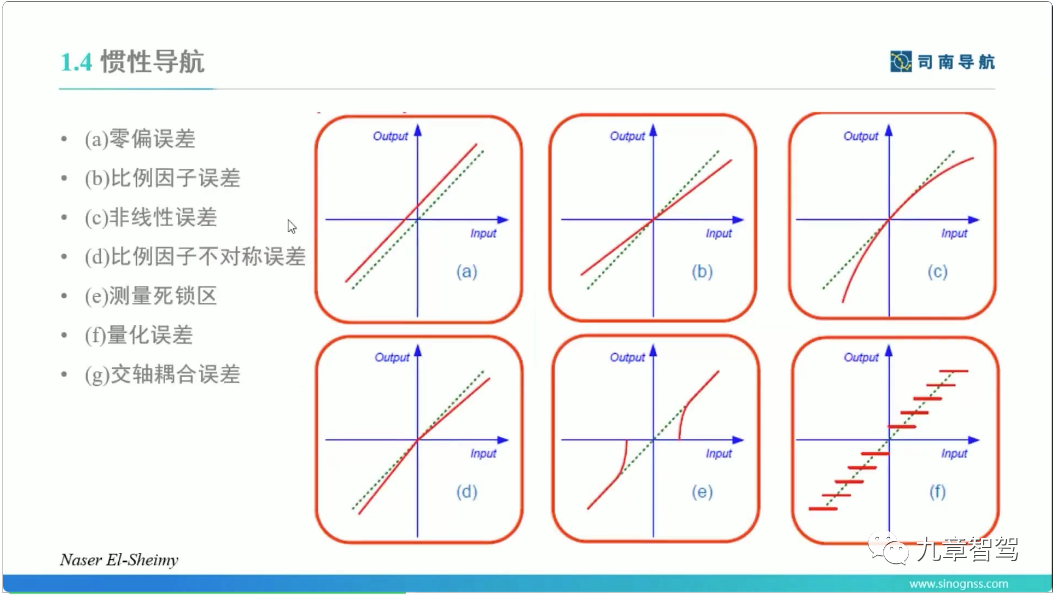
△IMU误差指标说明(引用自司南导航算法工程师线上分享)
其中最为关键的指标有两个:1.零偏误差;2.温度零偏。
零偏误差,即使用时会有常量误差,因为误差会随着时间累计,所以需要将该误差控制在一定范围内,一般陀螺仪的零偏误差控制在2-3度/小时,加速度计的零偏误差控制在0.003g以内(3mg)。
温度零偏,用于衡量对传感器对温度的敏感性,不同温度下的特性不同,一般会通过测量传感器的特性曲线,在出厂前进行补偿,从而降低温度零偏。
据了解,温度补偿的一致性会随着使用时长而发生变化,即使用几年后的补偿曲线和刚开始标定的补偿曲线和可能会有差异。
习惯上,大家可能更习惯用算法指标来衡量IMU,即在隧道等GNSS信号完全丢失的情况下,车辆行驶1000米后,测量值与真值的偏差。行业较为普遍指标为千分之一到千分之五(1sigma)左右。
五.GNSS+IMU耦合方式的演进趋势
从底层算法层面来看,组合导航算法可以分为松耦合、紧耦合及深耦合三种,算法实现难度依次递增。
几种耦合方式的介绍见下图,具体可查看之前九章智驾的文章《高精度组合导航里的松、紧、深耦合》
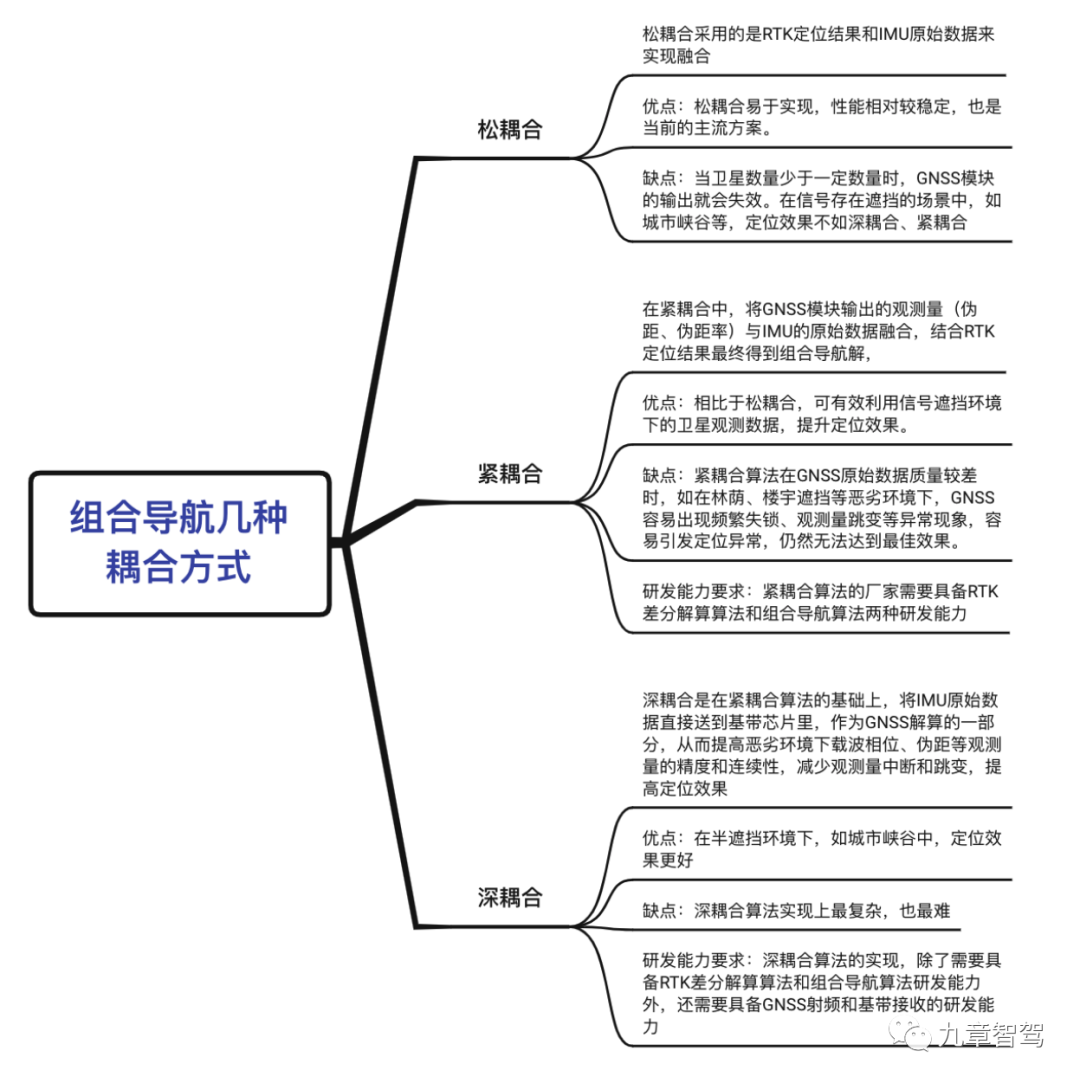
△组合导航的几种耦合方式
信息来源:九章智驾根据公开信息与专家访谈信息整理
在半遮挡场景下,如城市峡谷中,深耦合表现最好,紧耦合次之,松耦合最差;在全开阔场景和全遮挡场景下,则三种耦合方式表现相同。具体可见下图。
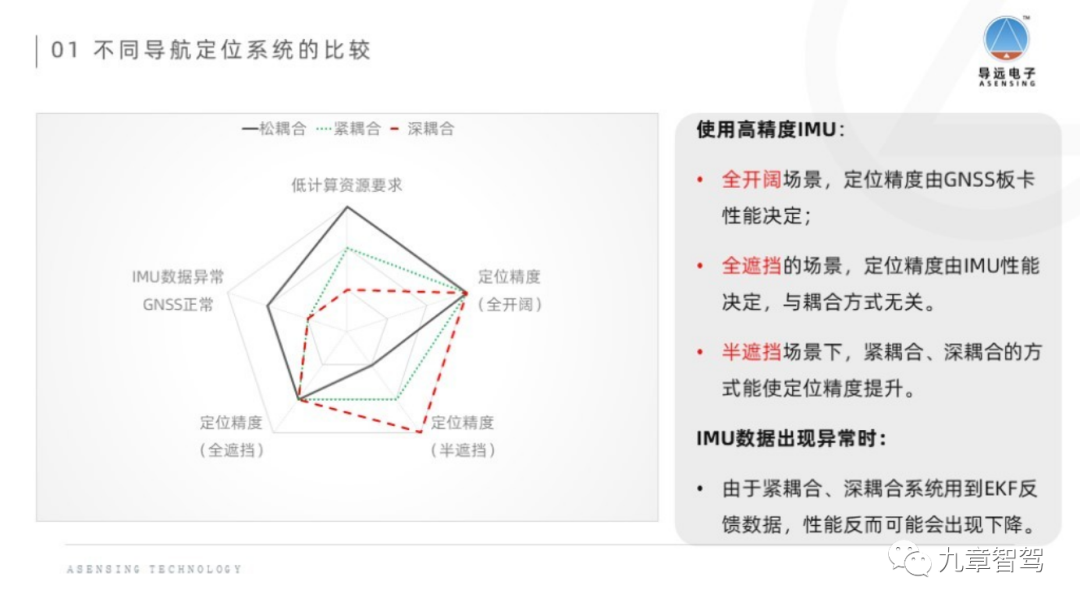
△不同耦合算法的定位效果对比
(图片引用自导远电子官网)
当乘用车前装量产的关注点从高速NOA慢慢转移到城区NOA时,这时候深耦合的优势就体现出来了。
在和行业内专家交流时,大家也都认可技术表现上深耦合更好,那么未来深耦合会不会成为主流趋势呢?
业内声音不一,有不少专家认为深耦合会成为主流趋势。
不过,国汽大有时空研发副总裁李庆建认为,从自动驾驶域控发展趋势、主机厂与供应商的博弈以及结合域控集成的模式等角度来考虑,组合导航算法将以在域控算法的形态存在。
在深耦合的模式下,域控形态实现具有更大的难度,紧组合将会成为当前可行的算法。在未来,卫导、惯导和组合导航算法集中定点也许会成为过去,如果主机厂没有对深耦合的算法Know-how有足够的开发能力,将主导算法,把地图、感知等多源融合定位作为重点。
六.组合导航的集成化趋势
虽然某些车企在自研组合导航算法,不过有更多主机厂会选择一家集成商将卫导、惯导和组合导航算法集成在一起提供,也就是俗称的“P-Box”(定位盒子),还有些会把高精地图也集成其中,称为“地图盒子”(HD MAP BOX)。
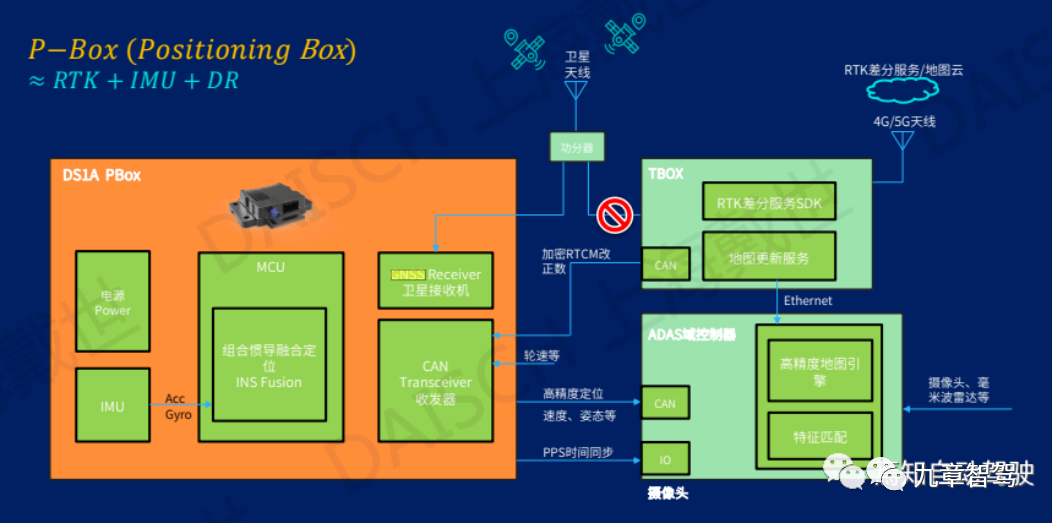
△戴世智能P-Box技术架构
(图片来源:焉知)
行业里普遍认为定位盒子和地图盒子只是个过渡形态的产品,随着域控制器技术的逐渐成熟和中央集成式架构的演进,域控制器集成组合导航模块将成为主流趋势,即将组合导航算法集成、GNSS和IMU模组集成到域控内,或与其他器件集成在一起。
集成化有很多优势。
一、降低成本。目前有定位盒子供应商的常见做法是,外购GNSS模组和IMU模组,将组合导航算法放在独立的MCU内,全部集成在定位盒子中;相比之下,将组合导航算法集成到域控内,可以省掉一个独立的MCU。
二、提高数据交换效率。 将组合导航算法集成到域控内,可降低定位模块与其他算法模块数据交换的延迟。
三、方便布置。随着集成度越来越高,GNSS和IMU逐渐从器件级向板卡级、芯片级演变,相比于独立的定位盒子,集成在其他器件内,布置上更加方便,连接线束也少了。
那么,组合导航集成在域控内,是否会成为以后的主流趋势呢?
笔者在与众多行业专家交流后发现,虽然已有不少车企选择将IMU和GNSS模块集成在域控制器内,但该做法仍存在不少工程上挑战。
其中最大的挑战,来自于IMU对安装位置和环境的超高要求。
第一,IMU对安装位置要求很高。因为在使用IMU时,自动驾驶系统默认IMU的位姿和加速度代表了整车的状态,所以IMU最好的安装位置是后轮轴线的中心位置。因此,一些业内专家指出,是否将IMU集成在域控制器内取决于域控制器的位置,如果位置不合适,则不宜将IMU集成在域控内。
实际操作中,若位置不合适,可以将安装位置与理想位置进行标定,再经过坐标转化即可使用,不过,这个转化过程会造成部分器件精度的损失。
第二,IMU对温度变化非常敏感,所以安装处温度变化不宜过大,而域控制器内部由于有大功率的SoC,温度变化较大,可能会影响IMU的测量精度。实际操作中,虽然出厂前会经过温度补偿曲线进行标定,不过前文中提到该温度补偿曲线会随着时间而变化,可能会增加误差。(当然,也有专家反馈,根据目前已经量产的项目反馈,该误差造成的影响并不大。)
第三,IMU对安装面的平整度和刚度要求高,而域控制器由于PCB板面积较大、刚性不足,加工过程中的弯曲变形也会影响IMU的性能,域控工作中的振动也会带来额外的噪声。这一点,可通过调整安装位置和局部增加刚度来优化。
GNSS模块的安装位置,也需要更多考虑布置方便和集成方便度,比如有些会把GNSS模块与V2X和T-Box进行集成。
一位行业专家认为,GNSS在模块化后,体积足够小,贴在哪里都可以。一般为了布置方便,会放在更靠近GNSS天线的位置。因为GNSS的天线与卫星定位搜星有关,所以会放置在靠外的位置,一般选择和4G天线、收音机天线(鲨鱼鳍)等集成在一起。如果不考虑位置而将GNSS模块布置在域控的话,GNSS的天线要连接到域控,连接线会比较长,授时精度可能会受影响。
七.独立盒子和集成化趋势或将长期并存
与定位盒子集成化的趋势相对应的是,定位盒子供应商则希望继续保持独立盒子的形态,这种独立盒子可接入更多的信号,继续提升定位精度。
如导远推出的地图盒子,除集成了GNSS、IMU、轮速和高精地图外,还进一步接入了ADAS相机,从而可以通过视觉融合定位,进一步提高定位精度和可靠性——据称可在95%置信度下实现横向误差小于0.2米、纵向误差小于2米。
不过,一位新势力车企负责定位的工程师表示,对于将视觉融合定位交由定位盒子供应商来完成这种做法,他们是完全“不可接受”。究其原因,一方面,这“关系到谁集成谁的问题”,职责不容易区分,“出了问题,到底是传感器的问题、定位盒子的问题,还是融合算法的问题,不好判责”;另一方面,他们也不认可定位盒子供应商的图像处理能力,况且,这也涉及到图像被两次处理造成的算力浪费问题。
对于这种行为,某组合导航供应商高管认为,现阶段,传统车企或者研发能力弱的车企,量产高阶智能驾驶时,为了更方便地控制成本、提升可靠性,更希望供应商能够提供定位的整体解决方案,如集成卫导、惯导、高精地图,甚至视觉融合定位等功能。
将组合导航集成到域控中的方案,一方面对车厂的研发能力有较高的要求,另一方面对于感知、决策等算法也有很高的要求。因此,如果这两方面要求都不能达到,把定位交给第三方供应商来解决,是一个可以实现快速量产,且集成度和可靠性都比较高的方案。
看下来,虽然长期来看定位模块的集成化是个趋势,但定位盒子仍或将长期存在。
八.做好融合定位算法,可降低对组合导航关键部件的要求
前述提到的组合导航,其实都是自动驾驶定位系统中的一部分,最终系统是通过将各种数据进行融合定位。
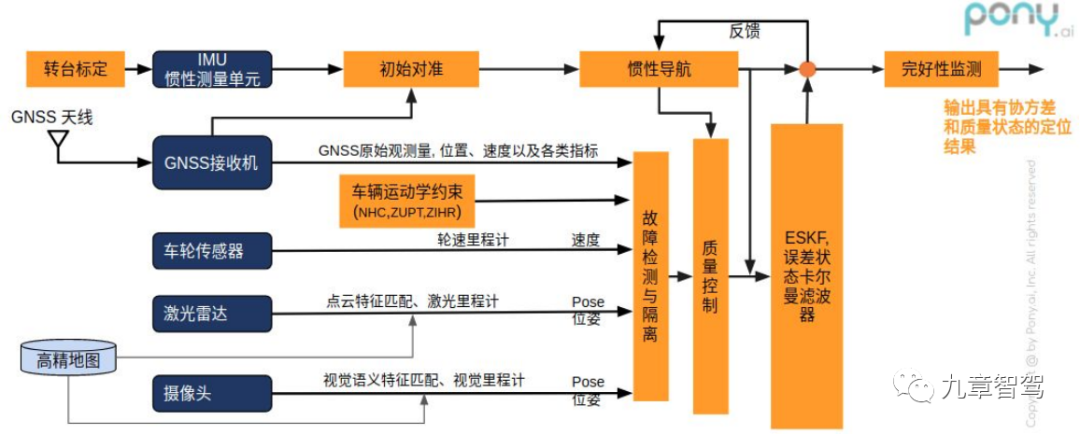
△小马智行融合定位架构
(来源:小马智行账号知乎文章)
一般常见的融合定位用到的数据包括GNSS、IMU、RTK(或PPP-RTK)、高精地图、轮速传感器、激光雷达、摄像头等,最终的定位精度取决于融合后的定位精度。
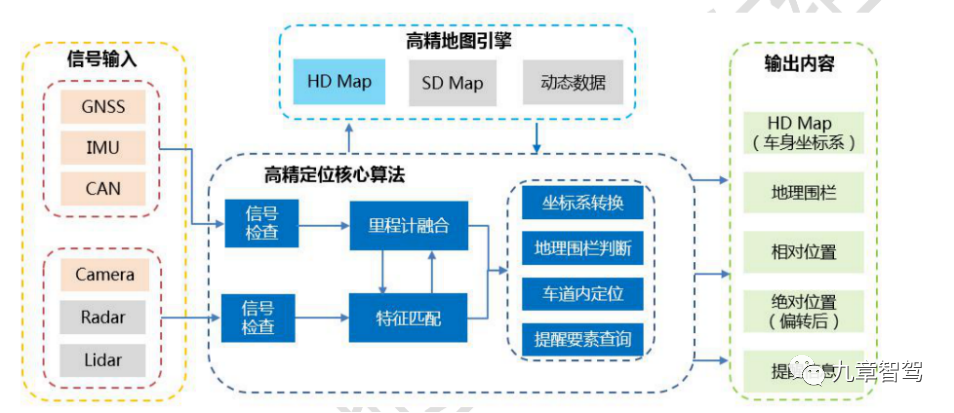
△Apollo融合高定位软件架构
(数据来源:Apollo官方)
值得一提的事,除了以GNSS为主的绝对定位外,还可以根据摄像头观测到的车道线的位置来实现横向的相对定位,以及使用激光雷达、摄像头、毫米波雷达等观测到的周围关键特征(如标志牌、红绿灯等)和高精地图进行匹配,来实现纵向的相对定位(SLAM)。
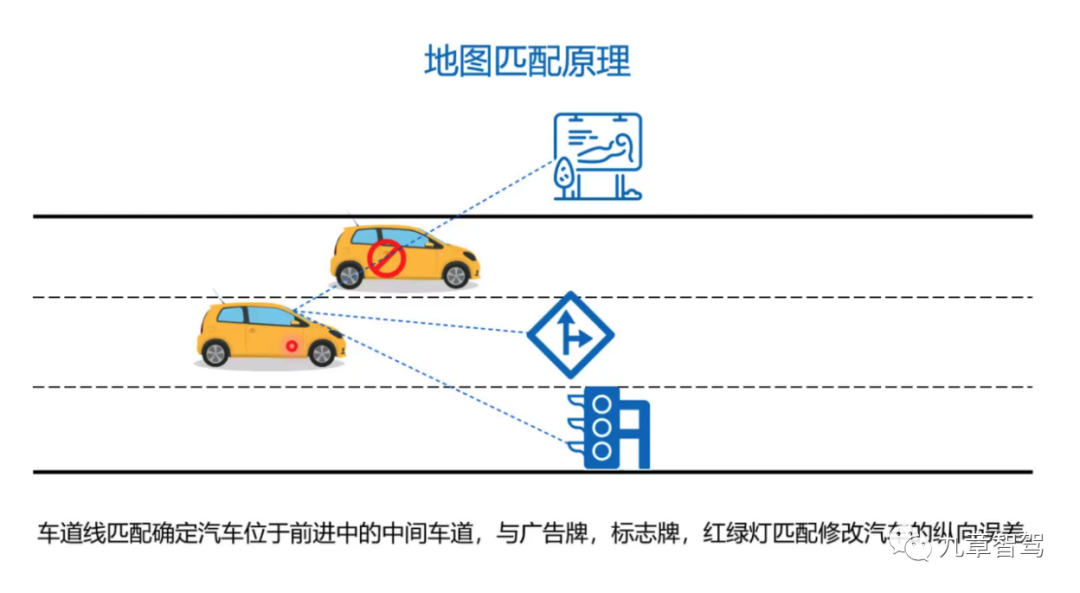
△相对定位匹配原理
(来源:六分科技的线上分享)
事实上,如果融合定位算法做的够好的话,是可以降低对组合导航关键部件的要求(如IMU精度等)。
很多专家都表示,IMU的高精度主要为了应对一些定位退化场景——如隧道。在隧道场景中,只能依赖两端的GNSS值进行绝对定位,隧道中间只能依赖IMU进行航迹推算。
不过也并非没有办法,百度阿波罗的一位专家在某次分享中提到:一方面隧道内对绝对精度的要求并不高,道路的曲率变化不会太极限;另一方面,可以引入更多的特征,比如纹理来帮助定位。
也有专家提到,在隧道中可以利用视觉和毫米波雷达来实现横向定位,至于纵向定位的精度,“其实也没有那么重要”。
九.融合定位可否摆脱对高精地图的依赖?
除了能降低组合导航要求外,某L4进入前装量产的公司也透露正在探索不依赖RTK实现高速NOA功能的方案。
事实上,高精度定位是搭配高精地图进行使用的,如果RTK可以不需要,那么高精地图是否还需要呢?
业内不少人认为在自动驾驶中,高精地图是个“拐杖”。高精地图不受环境影响、不被距离限制,可以辅助感知作超视距感知输入,对传感器进行有效弥补。如果现在就扔掉“拐杖”,可能还会有一些问题,如现实场景道路中,常会遇到大车挡道、车道线模糊等问题,传感器也常常受限于距离和环境影响。
据一些业内专家反馈,缺少高精地图(仅依赖导航地图),实现车道级定位比较困难,因为导航地图道路中缺少车道信息,只能通过视觉等识别的车道信息进行相对定位。当在路口遇到路牌和车道线遮挡时,很难识别道路拓扑结构,容易出现决策规划错误。
此外,在小曲率匝道中行驶时,因为导航地图缺少曲率信息,车辆的横纵向控制将会比较困难,很容易会有锯齿感。
从这些方面来说,某种程度的“高精地图”还是需要的,不过这种所谓的“高精地图”可能不像现在图商提供的精度那么高、元素那么全,可能是在导航地图上覆盖一层道路语义地图,姑且可以称作“导航地图 Plus”。
在这方面,记忆泊车提供了很好的范式。记忆泊车功能开启之前,需要先构建地图和记忆路线,再基于构建好的地图进行定位决策规划。
于是,参考记忆泊车,一些方案商提出了记忆行车功能。对于城市通勤路线,通过反复几次行驶后完成构建地图和路线记忆,即在导航地图上覆盖一层本地构建的语义地图“导航地图Plus”,然后基于此地图进行定位决策和规划,实现城区内不依赖高精地图的点到点领航辅助。
这一定程度上可以实现“单机”版的地图,如果再进一步,本地构建的地图分享到云端呢?那岂不是就成了众包地图?
事实上,小鹏汽车方面称,已经支持停车场记忆泊车地图分享功能,用户学习路线后可选择分享路线,通过云端审核后,即可在手机端进行路线管理与分享,到达目标停车场内,还可以使用其他用户上传或者官方推荐的泊车路线,这一定程度上,这已经是事实上的停车场“众包”地图了。
行车和泊车,虽然功能逻辑不同,在解决地图问题的方向上,也许将会殊途同归。
参考资料
1.智能网联汽车高精地图白皮书
2.Pony Tech | Pony.ai 地图与定位系列文章:组合导航在自动驾驶定位技术中的重要性
https://zhuanlan.zhihu.com/p/512611484
3.导航行业专题研究:组合导航迎自动驾驶大时代 https://mp.weixin.qq.com/s/juYXHF8JR2EeSPDBjFbFbw
4.司南导航技术前线:直播回放 | 组合导航与智能驾驶https://mp.weixin.qq.com/s/TwK0A4M35zvVuCg_z2dtyA
5.北云科技推出车规级组合导航单元,助力自动驾驶量产车型
https://mp.weixin.qq.com/s/cmNQ2FiZCUDhJ3fJzYkBIg
6.导远电子:自动驾驶紧耦合定位需要什么样的IMU https://zhuanlan.zhihu.com/p/411435503
7.十一号组织:GNSS(一),自动驾驶定位团队的“保护伞”
https://mp.weixin.qq.com/s/bWbP5prPGDEVfhnbwwN4PQ
8.十一号组织:GNSS(二),自动驾驶定位团队的“保护伞”
https://mp.weixin.qq.com/s/QOzQ-U6DTii3Fnholo1wmQ
9.学术交流丨从RTK、PPP到PPP-RTK
https://www.sohu.com/a/447492212_120381558
10.记忆泊车 路线分享 新功能使用指南-小鹏社区https://bbs.xiaopeng.com/article/915831
写在最后
与作者交流
如果希望与文章作者直接交流,可以直接扫描右方二维码,添加作者本人微信。

注:加微信时务必备注您的真实姓名、公司、现岗位
以及意向岗位等信息,谢谢!
关于投稿
如果您有兴趣给《九章智驾》投稿(“知识积累整理”类型文章),请扫描右方二维码,添加工作人员微信。

注:加微信时务必备注您的真实姓名、公司、现岗位
以及意向岗位等信息,谢谢!
“知识积累”类稿件质量要求:
A:信息密度高于绝大多数券商的绝大多数报告,不低于《九章智驾》的平均水平;
B:信息要高度稀缺,需要80%以上的信息是在其他媒体上看不到的,如果基于公开信息,需有特别牛逼的独家观点才行。多谢理解与支持。
推荐阅读:
◆九章 - 2022年度文章大合集
◆投奔“自动驾驶第一城”—— 一场说走就走的“迁都”
◆万字长文讲清楚4D毫米波雷达
◆万字长文解读深度学习算法在自动驾驶规控中的应用
◆线控转向量产商用的挑战与曙光
◆“在别人恐惧时贪婪”,这支基金将在“自动驾驶寒冬”加大投资力度




![[OpenMMLab]AI实战营第六节课](https://img-blog.csdnimg.cn/55e057506efe4b1a9cb2a5279785b1c3.png#pic_center)