一、软件硬件说明
软件:STM32CubeMX V6.6.1 /KEIL5 V5.29
硬件:正点原子阿波罗开发板,核心板STM32F429IGT6(176脚)
使用USB_SLAVE接口连接电脑USB,从而读取W25Q256里的文件
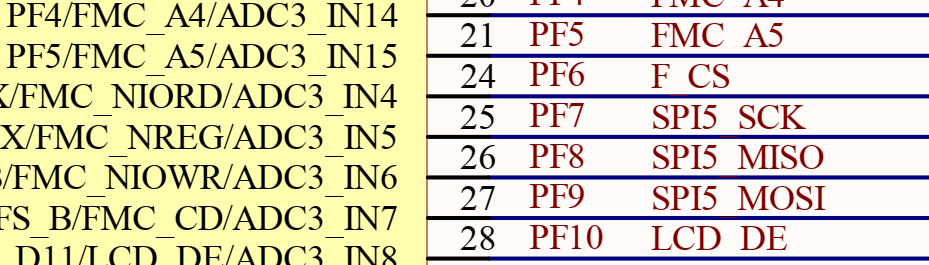
W25Q256:SPI5接口

二、STM32CubeMX配置
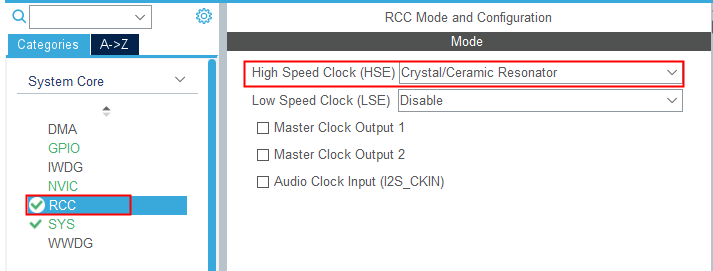
RCC配置
SYS配置,选择SW方式,因为要用到FREERTOS,时钟源选TIM7,其他定时器也可以。

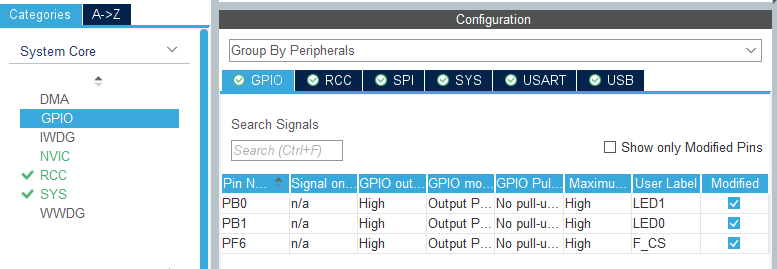
GPIO配置,PB0和PB1控制两个LED灯,用来指示程序运行;PF6为SPI5的CS引脚,初始化时拉高,即不选中。
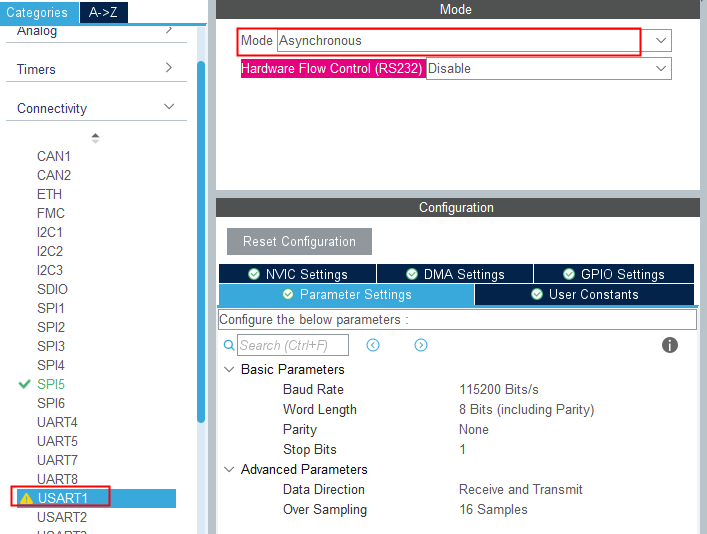
USART1配置,方便输出调试信息,参数默认
SPI5配置,刚开始速度配置低一点,256分频。W25Q256可以使用模式0(CPOL =0 CPOA=0 ) 或者模式3(CPOL=1 CPOA=1),这里配置为模式0。模式3可自行测试。

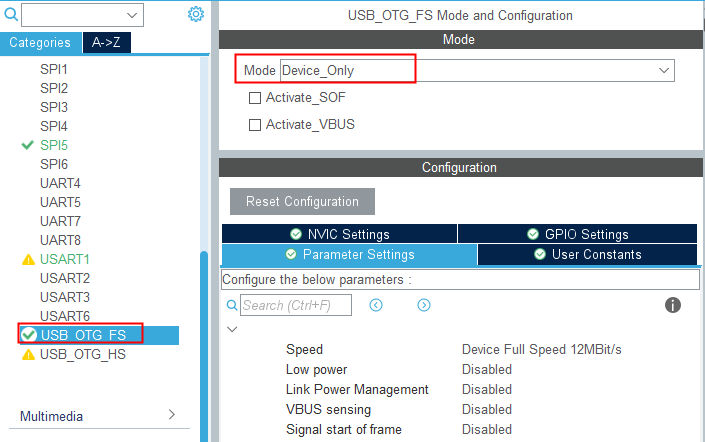
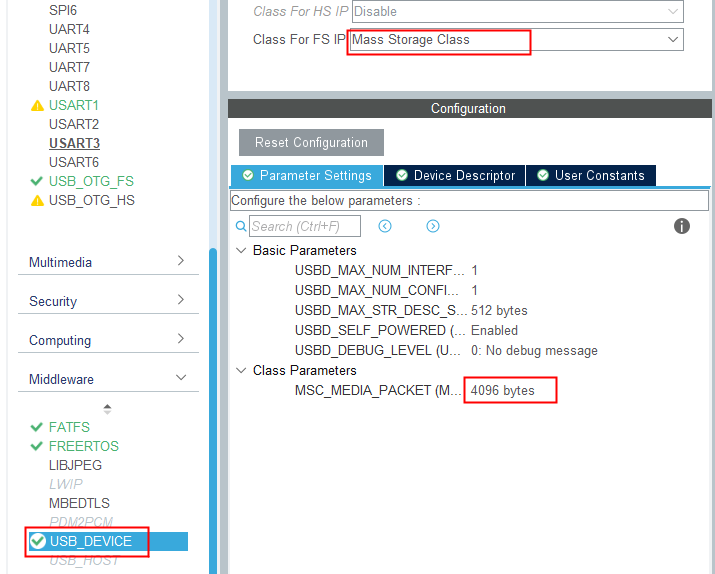
USB_OTG_FS配置,参数默认
USB_Device配置,MSC_MEDIA_PACKET参数改为4096
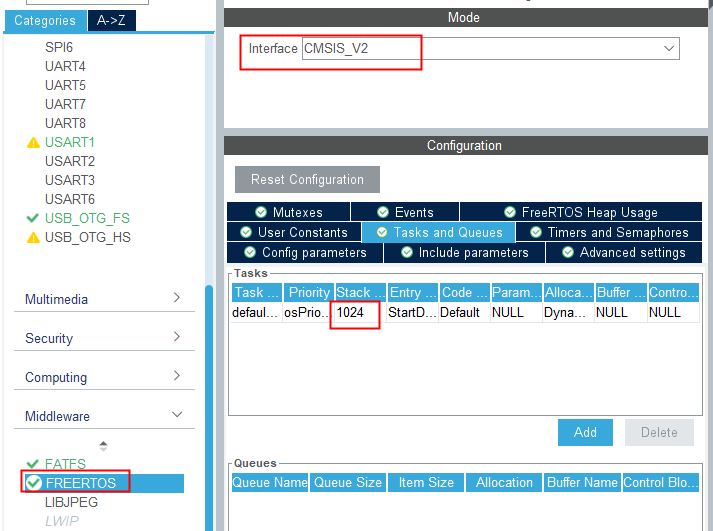
FREERTOS配置,将默认任务的堆栈大小改为1024
FATFS配置,修改如下

时钟配置,外部晶振为25MHz,时钟配置为168MHz

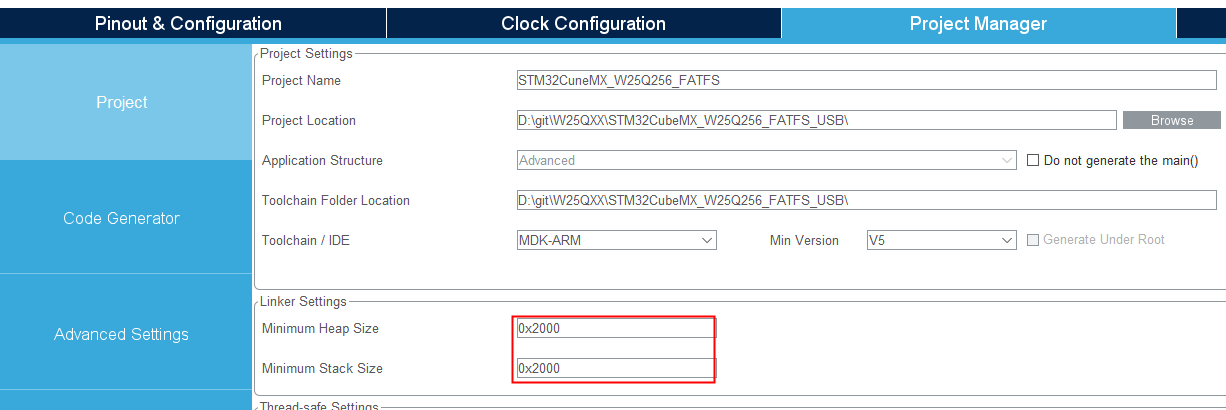
工程配置,堆栈设置大一些

生成代码,点击GENERATE CODE,生成基础代码

三、代码说明
串口重映射
usart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
#include "stdio.h"
//加入以下代码,支持printf函数
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (int) ch;
return ch;
}
/* USER CODE END 1 */
w25qxx.c
#include "w25qxx.h"
#include "spi.h"
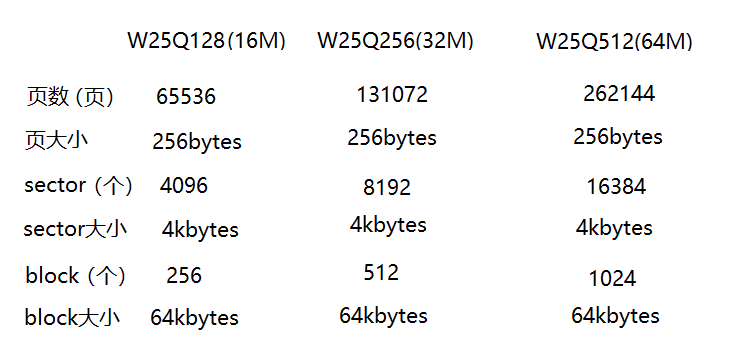
u16 W25QXX_TYPE=W25Q256; //默认是W25Q256
//4Kbytes为一个Sector
//16个sector为1个Block
//W25Q256
//容量为32M字节,共有512个Block,8192个Sector
//SPI速度设置函数
//SPI速度=fAPB1/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256
//fAPB1时钟一般为45Mhz:
void SPI5_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
__HAL_SPI_DISABLE(&hspi5); //关闭SPI
hspi5.Instance->CR1&=0XFFC7; //位3-5清零,用来设置波特率
hspi5.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度
__HAL_SPI_ENABLE(&hspi5); //使能SPI
}
//SPI5 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI5_ReadWriteByte(u8 TxData)
{
u8 Rxdata;
HAL_SPI_TransmitReceive(&hspi5,&TxData,&Rxdata,1, 1000);
return Rxdata; //返回收到的数据
}
//初始化SPI FLASH的IO口
void W25QXX_Init(void)
{
u8 temp;
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOF_CLK_ENABLE(); //使能GPIOF时钟
//PF6
GPIO_Initure.Pin=GPIO_PIN_6; //PF6
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //快速
HAL_GPIO_Init(GPIOF,&GPIO_Initure); //初始化
W25QXX_CS=1; //SPI FLASH不选中
SPI5_SetSpeed(SPI_BAUDRATEPRESCALER_2); //设置为45M时钟,高速模式
W25QXX_TYPE=W25QXX_ReadID(); //读取FLASH ID.
if(W25QXX_TYPE==W25Q256) //SPI FLASH为W25Q256
{
temp=W25QXX_ReadSR(3); //读取状态寄存器3,判断地址模式
if((temp&0X01)==0) //如果不是4字节地址模式,则进入4字节地址模式
{
W25QXX_CS=0; //选中
SPI5_ReadWriteByte(W25X_Enable4ByteAddr);//发送进入4字节地址模式指令
W25QXX_CS=1; //取消片选
}
}
}
//读取W25QXX的状态寄存器,W25QXX一共有3个状态寄存器
//状态寄存器1:
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
//状态寄存器2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//状态寄存器3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
//regno:状态寄存器号,范:1~3
//返回值:状态寄存器值
u8 W25QXX_ReadSR(u8 regno)
{
u8 byte=0,command=0;
switch(regno)
{
case 1:
command=W25X_ReadStatusReg1; //读状态寄存器1指令
break;
case 2:
command=W25X_ReadStatusReg2; //读状态寄存器2指令
break;
case 3:
command=W25X_ReadStatusReg3; //读状态寄存器3指令
break;
default:
command=W25X_ReadStatusReg1;
break;
}
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(command); //发送读取状态寄存器命令
byte=SPI5_ReadWriteByte(0Xff); //读取一个字节
W25QXX_CS=1; //取消片选
return byte;
}
//写W25QXX状态寄存器
void W25QXX_Write_SR(u8 regno,u8 sr)
{
u8 command=0;
switch(regno)
{
case 1:
command=W25X_WriteStatusReg1; //写状态寄存器1指令
break;
case 2:
command=W25X_WriteStatusReg2; //写状态寄存器2指令
break;
case 3:
command=W25X_WriteStatusReg3; //写状态寄存器3指令
break;
default:
command=W25X_WriteStatusReg1;
break;
}
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(command); //发送写取状态寄存器命令
SPI5_ReadWriteByte(sr); //写入一个字节
W25QXX_CS=1; //取消片选
}
//W25QXX写使能
//将WEL置位
void W25QXX_Write_Enable(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_WriteEnable); //发送写使能
W25QXX_CS=1; //取消片选
}
//W25QXX写禁止
//将WEL清零
void W25QXX_Write_Disable(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_WriteDisable); //发送写禁止指令
W25QXX_CS=1; //取消片选
}
//读取芯片ID
//返回值如下:
//0XEF13,表示芯片型号为W25Q80
//0XEF14,表示芯片型号为W25Q16
//0XEF15,表示芯片型号为W25Q32
//0XEF16,表示芯片型号为W25Q64
//0XEF17,表示芯片型号为W25Q128
//0XEF18,表示芯片型号为W25Q256
u16 W25QXX_ReadID(void)
{
u16 Temp = 0;
W25QXX_CS=0;
SPI5_ReadWriteByte(0x90);//发送读取ID命令
SPI5_ReadWriteByte(0x00);
SPI5_ReadWriteByte(0x00);
SPI5_ReadWriteByte(0x00);
Temp|=SPI5_ReadWriteByte(0xFF)<<8;
Temp|=SPI5_ReadWriteByte(0xFF);
W25QXX_CS=1;
return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
{
u16 i;
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ReadData); //发送读取命令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((ReadAddr)>>24));
}
SPI5_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((ReadAddr)>>8));
SPI5_ReadWriteByte((u8)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI5_ReadWriteByte(0XFF); //循环读数
}
W25QXX_CS=1;
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void W25QXX_Write_Page(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 i;
W25QXX_Write_Enable(); //SET WEL
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_PageProgram); //发送写页命令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((WriteAddr)>>24));
}
SPI5_ReadWriteByte((u8)((WriteAddr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((WriteAddr)>>8));
SPI5_ReadWriteByte((u8)WriteAddr);
for(i=0;i<NumByteToWrite;i++)SPI5_ReadWriteByte(pBuffer[i]);//循环写数
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待写入结束
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 pageremain;
pageremain=256-WriteAddr%256; //单页剩余的字节数
if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节
while(1)
{
W25QXX_Write_Page(pBuffer,WriteAddr,pageremain);
if(NumByteToWrite==pageremain)break;//写入结束了
else //NumByteToWrite>pageremain
{
pBuffer+=pageremain;
WriteAddr+=pageremain;
NumByteToWrite-=pageremain; //减去已经写入了的字节数
if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节
else pageremain=NumByteToWrite; //不够256个字节了
}
};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
u8 W25QXX_BUFFER[4096];
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096;//扇区地址
secoff=WriteAddr%4096;//在扇区内的偏移
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
for(i=0;i<secremain;i++)//校验数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
if(NumByteToWrite==secremain)break;//写入结束了
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain; //字节数递减
if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
else secremain=NumByteToWrite; //下一个扇区可以写完了
}
};
}
//擦除整个芯片
//等待时间超长...
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ChipErase); //发送片擦除命令
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 根据实际容量设置
//擦除一个扇区的最少时间:150ms
void W25QXX_Erase_Sector(u32 Dst_Addr)
{
//监视falsh擦除情况,测试用
//printf("fe:%x\r\n",Dst_Addr);
Dst_Addr*=4096;
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_SectorErase); //发送扇区擦除指令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((Dst_Addr)>>24));
}
SPI5_ReadWriteByte((u8)((Dst_Addr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((Dst_Addr)>>8));
SPI5_ReadWriteByte((u8)Dst_Addr);
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待擦除完成
}
//等待空闲
void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1)&0x01)==0x01); // 等待BUSY位清空
}
//进入掉电模式
void W25QXX_PowerDown(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_PowerDown); //发送掉电命令
W25QXX_CS=1; //取消片选
HAL_Delay(3); //等待TPD
}
//唤醒
void W25QXX_WAKEUP(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xAB
W25QXX_CS=1; //取消片选
HAL_Delay(3); //等待TRES1
}
w25qxx.h
#ifndef __W25QXX_H
#define __W25QXX_H
#include "main.h"
//W25X系列/Q系列芯片列表
#define W25Q80 0XEF13
#define W25Q16 0XEF14
#define W25Q32 0XEF15
#define W25Q64 0XEF16
#define W25Q128 0XEF17
#define W25Q256 0XEF18
extern u16 W25QXX_TYPE; //定义W25QXX芯片型号
#define W25QXX_CS PFout(6) //W25QXX的片选信号
//
//指令表
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9
void W25QXX_Init(void);
u16 W25QXX_ReadID(void); //读取FLASH ID
u8 W25QXX_ReadSR(u8 regno); //读取状态寄存器
void W25QXX_4ByteAddr_Enable(void); //使能4字节地址模式
void W25QXX_Write_SR(u8 regno,u8 sr); //写状态寄存器
void W25QXX_Write_Enable(void); //写使能
void W25QXX_Write_Disable(void); //写保护
void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead); //读取flash
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);//写入flash
void W25QXX_Erase_Chip(void); //整片擦除
void W25QXX_Erase_Sector(u32 Dst_Addr); //扇区擦除
void W25QXX_Wait_Busy(void); //等待空闲
void W25QXX_PowerDown(void); //进入掉电模式
void W25QXX_WAKEUP(void); //唤醒
#endif
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "fatfs.h"
#include "spi.h"
#include "usart.h"
#include "usb_device.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "w25qxx.h"
#include "stdio.h"
#include "user_diskio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//要写入到W25Q16的字符串数组
const uint8_t TEXT_Buffer[]= {"STM32CubeMX FATFS W25Q256 Test"};
#define SIZE sizeof(TEXT_Buffer)
uint8_t datatemp[SIZE];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI5_Init();
MX_USART1_UART_Init();
MX_FATFS_Init();
/* USER CODE BEGIN 2 */
W25QXX_Init();//W25QXX初始化
// W25QXX_Write((u8*)TEXT_Buffer,0,SIZE);
// HAL_Delay(100);
// W25QXX_Read(datatemp,0,SIZE);
// printf("read data:\r\n");
// printf("%s\r\n",datatemp);
FatfsTest();
/* USER CODE END 2 */
/* Init scheduler */
osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0|GPIO_PIN_1);
HAL_Delay(500);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM7 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM7) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
main.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
/* Private defines -----------------------------------------------------------*/
#define F_CS_Pin GPIO_PIN_6
#define F_CS_GPIO_Port GPIOF
#define LED1_Pin GPIO_PIN_0
#define LED1_GPIO_Port GPIOB
#define LED0_Pin GPIO_PIN_1
#define LED0_GPIO_Port GPIOB
/* USER CODE BEGIN Private defines */
///
//定义一些常用的数据类型短关键字
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;
typedef const int32_t sc32;
typedef const int16_t sc16;
typedef const int8_t sc8;
typedef __IO int32_t vs32;
typedef __IO int16_t vs16;
typedef __IO int8_t vs8;
typedef __I int32_t vsc32;
typedef __I int16_t vsc16;
typedef __I int8_t vsc8;
typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;
typedef const uint32_t uc32;
typedef const uint16_t uc16;
typedef const uint8_t uc8;
typedef __IO uint32_t vu32;
typedef __IO uint16_t vu16;
typedef __IO uint8_t vu8;
typedef __I uint32_t vuc32;
typedef __I uint16_t vuc16;
typedef __I uint8_t vuc8;
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOJ_ODR_ADDr (GPIOJ_BASE+20) //0x40022414
#define GPIOK_ODR_ADDr (GPIOK_BASE+20) //0x40022814
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define GPIOJ_IDR_Addr (GPIOJ_BASE+16) //0x40022410
#define GPIOK_IDR_Addr (GPIOK_BASE+16) //0x40022810
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#define PJout(n) BIT_ADDR(GPIOJ_ODR_Addr,n) //输出
#define PJin(n) BIT_ADDR(GPIOJ_IDR_Addr,n) //输入
#define PKout(n) BIT_ADDR(GPIOK_ODR_Addr,n) //输出
#define PKin(n) BIT_ADDR(GPIOK_IDR_Addr,n) //输入
/* USER CODE END Private defines */
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
freertos.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.stack_size = 1024 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void *argument);
extern void MX_USB_DEVICE_Init(void);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_EVENTS */
/* add events, ... */
/* USER CODE END RTOS_EVENTS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{
/* init code for USB_DEVICE */
MX_USB_DEVICE_Init();
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0|GPIO_PIN_1);
osDelay(500);
}
/* USER CODE END StartDefaultTask */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
user_diskio.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file user_diskio.c
* @brief This file includes a diskio driver skeleton to be completed by the user.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
#ifdef USE_OBSOLETE_USER_CODE_SECTION_0
/*
* Warning: the user section 0 is no more in use (starting from CubeMx version 4.16.0)
* To be suppressed in the future.
* Kept to ensure backward compatibility with previous CubeMx versions when
* migrating projects.
* User code previously added there should be copied in the new user sections before
* the section contents can be deleted.
*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
#endif
/* USER CODE BEGIN DECL */
/* Includes ------------------------------------------------------------------*/
#include <string.h>
#include "ff_gen_drv.h"
#include "w25qxx.h"
#include "stdio.h"
#include "fatfs.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Disk status */
static volatile DSTATUS Stat = STA_NOINIT;
#define PAGE_SIZE 256
#define SECTOR_SIZE 4096
#define SECTOR_COUNT 4096 //8192
#define BLOCK_SIZE 65536
#define FLASH_PAGES_PER_SECTOR SECTOR_SIZE/PAGE_SIZE
FRESULT f_res;
UINT bw;
BYTE ReadBuffer[1024]={0};
BYTE WriteBuffer[]= "STM32CubeMX W25QXX FATFS FREERTOS Test\r\n";
BYTE work[4096];
void mount_disk(void)
{
f_res = f_mount(&USERFatFS, USERPath, 0);
}
void format_disk(void)
{
f_res = f_mkfs(USERPath, FM_FAT, 4096, work, sizeof(work));
}
void create_file(void)
{
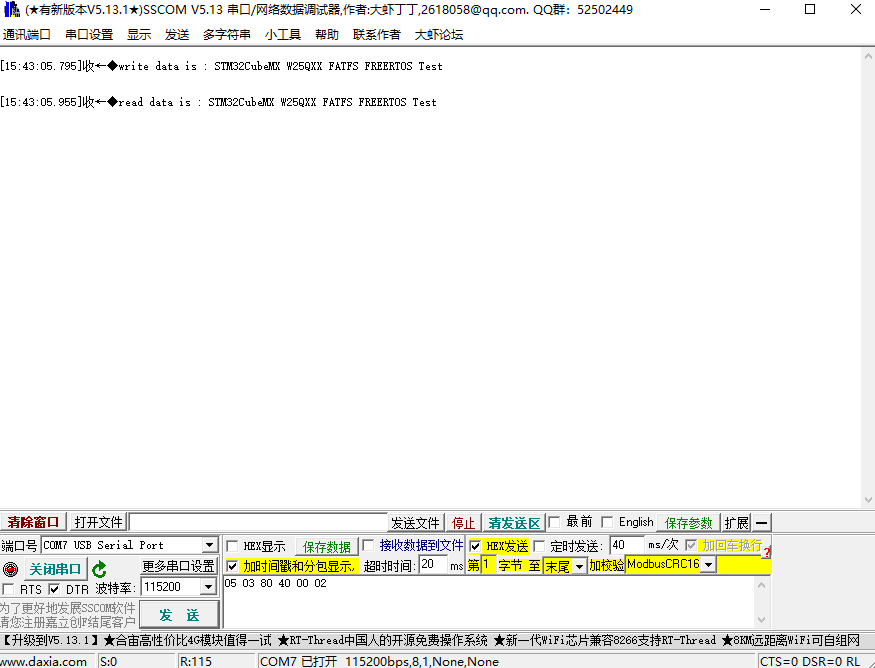
printf("write data is : %s\r\n",WriteBuffer);
f_res = f_open(&USERFile, "test.txt", FA_OPEN_ALWAYS | FA_WRITE);
f_res = f_write(&USERFile, WriteBuffer, sizeof(WriteBuffer), &bw);
f_res = f_close(&USERFile);
}
void read_file(void)
{
f_res = f_open(&USERFile, "test.txt", FA_READ);
f_res = f_read(&USERFile, ReadBuffer, sizeof(WriteBuffer), &bw);
printf("read data is : %s\r\n",ReadBuffer);
f_res = f_close(&USERFile);
}
FRESULT fileSystemInit()
{
FRESULT res = FR_OK;
res = f_mount(&USERFatFS, USERPath, 1);
if (res != FR_OK)
{
//No Disk file system,format disk !
res = f_mkfs(USERPath, FM_FAT, 4096, work, sizeof( work));
if (res == FR_OK)
{
res = f_mount(&USERFatFS, USERPath, 1);
if (res == 0)
{
return FR_OK;
}
else
return FR_DISK_ERR;
}
else
return FR_DISK_ERR;
}
else
return FR_OK;
}
//第一次运行文件系统,需要先注册文件系统和格式化
void FatfsTest(void)
{
fileSystemInit();
create_file(); //创建TXT文件
read_file(); //读取文件内容并放到ReadBuffer中
}
/* USER CODE END DECL */
/* Private function prototypes -----------------------------------------------*/
DSTATUS USER_initialize (BYTE pdrv);
DSTATUS USER_status (BYTE pdrv);
DRESULT USER_read (BYTE pdrv, BYTE *buff, DWORD sector, UINT count);
#if _USE_WRITE == 1
DRESULT USER_write (BYTE pdrv, const BYTE *buff, DWORD sector, UINT count);
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
DRESULT USER_ioctl (BYTE pdrv, BYTE cmd, void *buff);
#endif /* _USE_IOCTL == 1 */
Diskio_drvTypeDef USER_Driver =
{
USER_initialize,
USER_status,
USER_read,
#if _USE_WRITE
USER_write,
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
USER_ioctl,
#endif /* _USE_IOCTL == 1 */
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes a Drive
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
/* USER CODE BEGIN INIT */
Stat = STA_NOINIT;
if(W25QXX_ReadID() != 0)
{
Stat &= ~STA_NOINIT;
}
return Stat;
/* USER CODE END INIT */
}
/**
* @brief Gets Disk Status
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_status (
BYTE pdrv /* Physical drive number to identify the drive */
)
{
/* USER CODE BEGIN STATUS */
Stat &= ~STA_NOINIT;
return Stat;
/* USER CODE END STATUS */
}
/**
* @brief Reads Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data buffer to store read data
* @param sector: Sector address (LBA)
* @param count: Number of sectors to read (1..128)
* @retval DRESULT: Operation result
*/
DRESULT USER_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
/* USER CODE BEGIN READ */
// DRESULT res = RES_ERROR;
UINT i;
for(i = 0;i < count;i++)
{
W25QXX_Read(buff + i * SECTOR_SIZE,sector * SECTOR_SIZE + i * SECTOR_SIZE,4096 );
}
return RES_OK;
/* USER CODE END READ */
}
/**
* @brief Writes Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data to be written
* @param sector: Sector address (LBA)
* @param count: Number of sectors to write (1..128)
* @retval DRESULT: Operation result
*/
#if _USE_WRITE == 1
DRESULT USER_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
/* USER CODE BEGIN WRITE */
DRESULT res = RES_ERROR;
UINT i;
for(i = 0;i < count;i++)
{
W25QXX_Write((void *)(buff + i * SECTOR_SIZE),sector * SECTOR_SIZE + i * SECTOR_SIZE,4096 );
}
res = RES_OK;
/* USER CODE HERE */
return res;
/* USER CODE END WRITE */
}
#endif /* _USE_WRITE == 1 */
/**
* @brief I/O control operation
* @param pdrv: Physical drive number (0..)
* @param cmd: Control code
* @param *buff: Buffer to send/receive control data
* @retval DRESULT: Operation result
*/
#if _USE_IOCTL == 1
DRESULT USER_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
/* USER CODE BEGIN IOCTL */
DRESULT res = RES_OK;
switch(cmd)
{
case CTRL_SYNC :
break;
case CTRL_TRIM:
break;
case GET_BLOCK_SIZE:
*(DWORD*)buff = BLOCK_SIZE;
break;
case GET_SECTOR_SIZE:
*(DWORD*)buff = SECTOR_SIZE;
break;
case GET_SECTOR_COUNT:
*(DWORD*)buff = SECTOR_COUNT;
break;
default:
res = RES_PARERR;
break;
}
return res;
/* USER CODE END IOCTL */
}
#endif /* _USE_IOCTL == 1 */
usbd_storage_if.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : usbd_storage_if.c
* @version : v1.0_Cube
* @brief : Memory management layer.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usbd_storage_if.h"
/* USER CODE BEGIN INCLUDE */
#include "w25qxx.h"
/* USER CODE END INCLUDE */
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/** @addtogroup STM32_USB_OTG_DEVICE_LIBRARY
* @brief Usb device.
* @{
*/
/** @defgroup USBD_STORAGE
* @brief Usb mass storage device module
* @{
*/
/** @defgroup USBD_STORAGE_Private_TypesDefinitions
* @brief Private types.
* @{
*/
/* USER CODE BEGIN PRIVATE_TYPES */
/* USER CODE END PRIVATE_TYPES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Defines
* @brief Private defines.
* @{
*/
//#define STORAGE_LUN_NBR 1
//#define STORAGE_BLK_NBR 0x10000//65536
//#define STORAGE_BLK_SIZ 0x200//512
/* USER CODE BEGIN PRIVATE_DEFINES */
#define STORAGE_LUN_NBR 1
#define STORAGE_BLK_NBR 4096//8192
#define STORAGE_BLK_SIZ 4096
/* USER CODE END PRIVATE_DEFINES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Macros
* @brief Private macros.
* @{
*/
/* USER CODE BEGIN PRIVATE_MACRO */
/* USER CODE END PRIVATE_MACRO */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Variables
* @brief Private variables.
* @{
*/
/* USER CODE BEGIN INQUIRY_DATA_FS */
/** USB Mass storage Standard Inquiry Data. */
const int8_t STORAGE_Inquirydata_FS[] = {/* 36 */
/* LUN 0 */
0x00,
0x80,
0x02,
0x02,
(STANDARD_INQUIRY_DATA_LEN - 5),
0x00,
0x00,
0x00,
'S', 'T', 'M', ' ', ' ', ' ', ' ', ' ', /* Manufacturer : 8 bytes */
'P', 'r', 'o', 'd', 'u', 'c', 't', ' ', /* Product : 16 Bytes */
' ', ' ', ' ', ' ', ' ', ' ', ' ', ' ',
'0', '.', '0' ,'1' /* Version : 4 Bytes */
};
/* USER CODE END INQUIRY_DATA_FS */
/* USER CODE BEGIN PRIVATE_VARIABLES */
/* USER CODE END PRIVATE_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Exported_Variables
* @brief Public variables.
* @{
*/
extern USBD_HandleTypeDef hUsbDeviceFS;
/* USER CODE BEGIN EXPORTED_VARIABLES */
/* USER CODE END EXPORTED_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_FunctionPrototypes
* @brief Private functions declaration.
* @{
*/
static int8_t STORAGE_Init_FS(uint8_t lun);
static int8_t STORAGE_GetCapacity_FS(uint8_t lun, uint32_t *block_num, uint16_t *block_size);
static int8_t STORAGE_IsReady_FS(uint8_t lun);
static int8_t STORAGE_IsWriteProtected_FS(uint8_t lun);
static int8_t STORAGE_Read_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len);
static int8_t STORAGE_Write_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len);
static int8_t STORAGE_GetMaxLun_FS(void);
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
/**
* @}
*/
USBD_StorageTypeDef USBD_Storage_Interface_fops_FS =
{
STORAGE_Init_FS,
STORAGE_GetCapacity_FS,
STORAGE_IsReady_FS,
STORAGE_IsWriteProtected_FS,
STORAGE_Read_FS,
STORAGE_Write_FS,
STORAGE_GetMaxLun_FS,
(int8_t *)STORAGE_Inquirydata_FS
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes the storage unit (medium) over USB FS IP
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_Init_FS(uint8_t lun)
{
/* USER CODE BEGIN 2 */
//UNUSED(lun);
W25QXX_Init();
return (USBD_OK);
/* USER CODE END 2 */
}
/**
* @brief Returns the medium capacity.
* @param lun: Logical unit number.
* @param block_num: Number of total block number.
* @param block_size: Block size.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_GetCapacity_FS(uint8_t lun, uint32_t *block_num, uint16_t *block_size)
{
/* USER CODE BEGIN 3 */
//UNUSED(lun);
*block_num = STORAGE_BLK_NBR;
*block_size = STORAGE_BLK_SIZ;
return (USBD_OK);
/* USER CODE END 3 */
}
/**
* @brief Checks whether the medium is ready.
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_IsReady_FS(uint8_t lun)
{
/* USER CODE BEGIN 4 */
//UNUSED(lun);
if(W25QXX_ReadID() != 0)
return (USBD_OK);
else
return -1;
/* USER CODE END 4 */
}
/**
* @brief Checks whether the medium is write protected.
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_IsWriteProtected_FS(uint8_t lun)
{
/* USER CODE BEGIN 5 */
//UNUSED(lun);
return (USBD_OK);
/* USER CODE END 5 */
}
/**
* @brief Reads data from the medium.
* @param lun: Logical unit number.
* @param buf: data buffer.
* @param blk_addr: Logical block address.
* @param blk_len: Blocks number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_Read_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 6 */
//UNUSED(lun);
uint32_t i = 0;
for(i = 0;i < blk_len;i++)
{
W25QXX_Read(buf + i * STORAGE_BLK_SIZ,blk_addr * STORAGE_BLK_SIZ + i * STORAGE_BLK_SIZ,STORAGE_BLK_SIZ );
}
return (USBD_OK);
/* USER CODE END 6 */
}
/**
* @brief Writes data into the medium.
* @param lun: Logical unit number.
* @param buf: data buffer.
* @param blk_addr: Logical block address.
* @param blk_len: Blocks number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_Write_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 7 */
//UNUSED(lun);
uint32_t i = 0;
for(i = 0;i < blk_len;i++)
{
W25QXX_Write((void *)(buf + i * STORAGE_BLK_SIZ),blk_addr * STORAGE_BLK_SIZ + i * STORAGE_BLK_SIZ,STORAGE_BLK_SIZ );
}
return (USBD_OK);
/* USER CODE END 7 */
}
/**
* @brief Returns the Max Supported LUNs.
* @param None
* @retval Lun(s) number.
*/
int8_t STORAGE_GetMaxLun_FS(void)
{
/* USER CODE BEGIN 8 */
return (STORAGE_LUN_NBR - 1);
/* USER CODE END 8 */
}
/* USER CODE BEGIN PRIVATE_FUNCTIONS_IMPLEMENTATION */
/* USER CODE END PRIVATE_FUNCTIONS_IMPLEMENTATION */
/**
* @}
*/
/**
* @}
*/
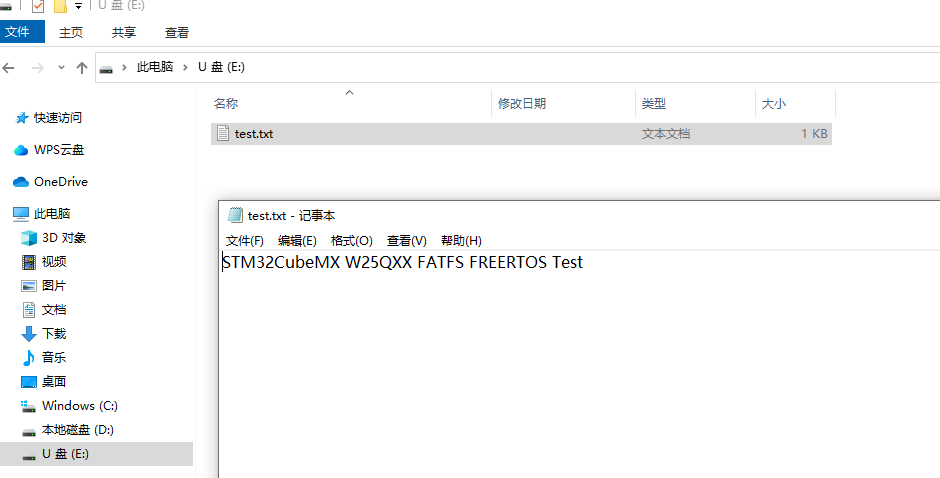
四、程序运行截图
五、几点讨论

本次实验用的时W25Q256,芯片大小为32M字节,但是虚拟出来的U盘大小实际只有16M,尝试修改了SECTOR_COUNT的大小为8192,W25Q256有8192个扇区,每个扇区大小为4096,总容量=8192*4096/1024/1024 = 32M字节,改了后虚拟U盘大小还是16M.
user_diskio.c

usbd_storage_if.c
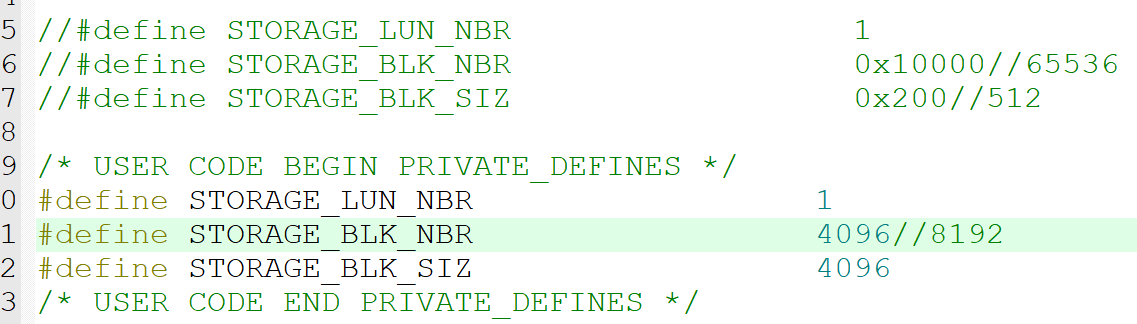
也尝试修改了STORAGE_BLK_NBR的大小为8192,虚拟U盘大小也是16M。知道如何设置U盘大小的朋友请留言,非常感谢。
六、完整工程链接
工程链接:https://download.csdn.net/download/chen18221987993/87431500