一、前言
此示例演示如何在海洋环境中模拟旋转天线阵列的计划位置指示器 (PPI) 雷达图像。您将配置雷达方案和光谱海面模型,使用点散射体集合模拟扩展目标,生成返回信号,并绘制结果的 PPI 图像。
二、配置雷达方案
设置 RNG 种子以获得可重复的结果。
该情景将包括一个大型旋转均匀矩形阵列(URA),安装在海面上方的固定位置。排列在长方体表面上的一组点目标将用于模拟中型集装箱船。
定义雷达系统参数。使用 10 GHz 的 X 波段雷达,方位角波束宽度为 1 度,距离分辨率为 10 米。使用 60 度的宽高程波束宽度,这将产生具有两行元素的 URA。
计算实现所需波束宽度所需的均匀间隔单元的数量,并创建一个 .将数组元素的属性设置为 true,以便仅包含来自指向方向的返回。
让雷达以 50 rpm 的速度旋转并以度/秒表示。根据此速率计算旋转周期。计算使用指定的方位角波束宽度最小覆盖 360 度所需的脉冲总数。使用旋转周期找到所需的脉冲重复频率 (PRF)。快速采样率必须是PRF的整数倍。使用所需的范围分辨率找到所需的采样率,然后进行调整以将此约束与PRF相匹配。雷达将使用短脉冲,每个分辨率单元一个样本。现在创建并设置所需的参数。
创建 并将 设置为 0 以允许从配置派生更新速率。现在配置海面。表面将在大小为 2 公里乘 2 公里的正方形区域上定义。该对象用于定义表面的光谱模型。该属性定义空间域中基础网格的间距,并定义频域中网格的间距。分辨率必须是表面长度的一个因素,因此请指定雷达距离分辨率的 1/4 的所需表面分辨率(足以捕获波的形状),然后进行调整以匹配此约束。
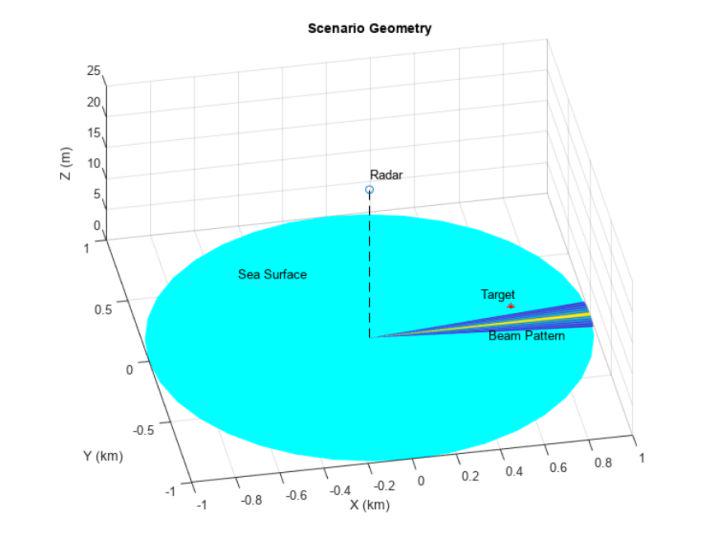
该对象用于指定将与表面关联的反射率模型。使用海况为 3 的 NRL 反射率模型进行水平偏振。使用反射率和光谱模型创建 2 km x 2 km 的海面。将风速指定为 10 m/s,将风向指定为 0 度,以便风向 +X 方向吹。创建雷达平台。使用该对象将雷达安装在海拔 24 米处,并使用参数指定围绕 Z 轴的旋转速率(以弧度/秒为单位)。
使用雷达上的属性将波束指向下方,使其位于雷达最低点和海面边缘之间的中心。定义长方体目标,然后使用提供的帮助函数将一组离散散射点添加到场景中,以基本表示目标。指定目标尺寸、总 RCS、位置、航向和速度。指定的距离分辨率用于确定散射体沿长方体表面的间距。最后,通过在场景中调用该方法,为雷达启用杂波生成。杂波发生器将仅包括光束 3 dB 宽度内的表面区域。默认情况下,表面阴影处于启用状态,可以使用该属性禁用。
使用提供的帮助程序函数创建方案的可视化效果。
三、运行模拟并收集退货
模拟的每一帧都将为一个方位角指向方向生成一个距离剖面图。接收到每帧的原始 IQ 数据后,将使用一个对象进行匹配过滤。立即创建响应对象,指定使用的采样率,并从雷达的波形对象中获取所需的匹配滤波器系数。
指定要模拟的 360 度完整度数。扫描从 0 度方位角开始,45 度的覆盖范围足以看到目标。在具有 360 GB RAM 和 10.64 GHz CPU 的机器上,完整的 3 度大约需要 6.<> 分钟。
根据所需的方位角覆盖范围设置方案停止时间。从脉冲总数中减去一半,以确保仿真包括指定的确切脉冲数。运行模拟。跟踪每个循环的帧号,并从范围响应对象获取范围箱的向量。矩阵将包含格式化为按方位角范围设置的信号数据。
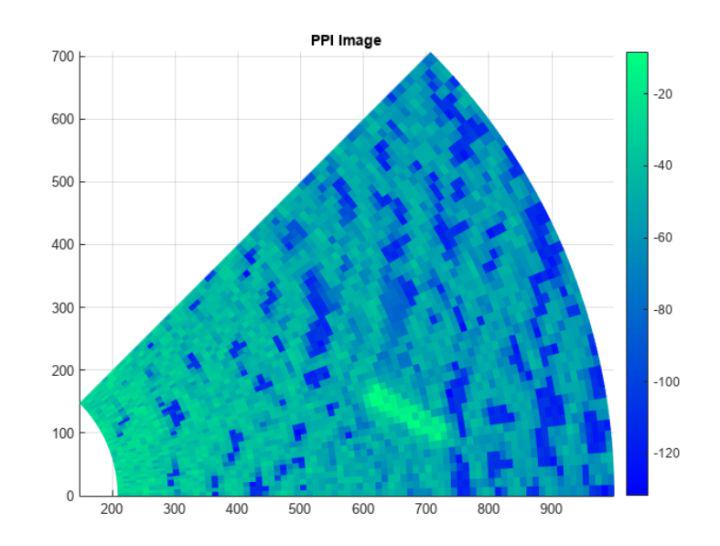
四、创建 PPI 映像
PPI 图像由一组以径向线排列的范围剖面组成,以形成笛卡尔空间中场景的圆形图像。
IQ 数据涵盖了整个范围的模糊性,因此首先将数据修剪到感兴趣的范围。使用最小地面范围 200 米和等于海面长度一半的最大地面范围,然后找到与这些范围对应的范围门指数。
将方位角和范围箱转换为矩形坐标,然后使用该函数绘制图像。为图像指定方位域时,请使用比脉冲数多一个点,以便图像完全包含所有 360 度方位角。
下面的 gif 显示了这种情况的记录,在大约 30 秒内天线旋转 34 次。

五、结论
在此示例中,您了解了如何在海洋环境中使用旋转雷达生成杂波和目标回波。您了解了如何使用光谱模型来获取逼真的海高度和表面阴影,以及如何使用一组点目标模拟扩展目标,从而允许表面部分遮挡目标。将IQ数据从极坐标格式转换为笛卡尔格式,并使用函数的颜色通道绘制以创建简单的PPI图像。
六、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
程序获取:https://mp.weixin.qq.com/s/WYVDZPRUeTL_lO6YkhGv1g