函数内容接上文:OpenCV day4-CSDN博客
目录
9.cv2.adaptiveThreshold():
10.cv2.split():
11.cv2.merge():
12.cv2.add():
13.cv2.subtract():
14.cv2.multiply():
15.cv2.divide():
16.cv2.bitwise_and():
17.cv2.bitwise_or():
18.cv2.inRange():
19.cv2.getRotationMatrix2D():
21.cv2.flip():
22.cv2.resize():
23.cv2.getPerspectiveTransform():
24.cv2.warpPerspective():
透视变换练习1:
透视变换练习2:
9.cv2.adaptiveThreshold():
| 功能 | 对图像进行局部自适应阈值化,解决光照不均问题,生成二值图像。 |
| 参数 | 1. src:输入灰度图像(单通道)。2. maxValue:满足条件时赋予的像素值(如255)。3. adaptiveMethod:阈值计算方式(ADAPTIVE_THRESH_MEAN_C 或 ADAPTIVE_THRESH_GAUSSIAN_C)。4. thresholdType:二值化类型(THRESH_BINARY 或 THRESH_BINARY_INV)。5. blockSize:局部邻域大小(奇数,如11)。6. C:从均值/高斯均值中减去的常数(用于微调阈值)。 |
| 返回值 | 二值化后的图像(numpy.ndarray)。 |
关键区别:
-
普通阈值(如
cv2.threshold):全局统一阈值。 -
自适应阈值:每个像素的阈值根据周围像素动态计算,适合光照不均的图像。
10.cv2.split():
| 功能 | 将多通道图像(如BGR)拆分为单通道数组。 |
| 参数 | src:输入的多通道图像(numpy.ndarray,如BGR格式的3通道图像)。 |
| 返回值 | 返回单通道数组的元组(如BGR图像返回(B, G, R)三个通道)。 |
11.cv2.merge():
| 功能 | 将多个单通道数组合并成一个多通道图像(如合并 B、G、R 通道成彩色图像)。 |
| 参数 | mv:一个包含单通道数组的列表或元组(如 [B, G, R])。 |
| 返回值 | 合并后的多通道图像(numpy.ndarray)。 |
关键点:
-
通常与
cv2.split()配合使用,用于通道分离后的重新合并。 -
输入的通道顺序决定输出图像的格式(如
[R, G, B]会生成 RGB 图像,而 OpenCV 默认是 BGR)。
12.cv2.add():
| 功能 | 对两张图像(或图像与标量)进行饱和加法运算(像素值超过最大值时截断)。 |
| 参数 | 1. src1:第一张输入图像或标量值。2. src2:第二张输入图像或标量值。3. mask(可选):掩膜,指定操作区域。4. dtype(可选):输出数据类型(如 cv2.CV_8U)。 |
| 返回值 | 加法结果图像(numpy.ndarray)。 |
关键特性:
-
饱和运算:结果超出范围时自动截断(如
uint8超过 255 则取 255)。 -
与
numpy.add()区别:NumPy 是模运算(256 → 0),而 OpenCV 是截断(256 → 255)。
13.cv2.subtract():
| 功能 | 对两张图像(或图像与标量)进行饱和减法运算(像素值低于最小值时截断为0)。 |
| 参数 | 1. src1:被减图像或标量值。2. src2:减数图像或标量值。3. mask(可选):掩膜,指定操作区域。4. dtype(可选):输出数据类型(如 cv2.CV_8U)。 |
| 返回值 | 减法结果图像(numpy.ndarray)。 |
14.cv2.multiply():
| 功能 | 对两张图像(或图像与标量)进行饱和乘法运算(像素值超过最大值时截断)。 |
| 参数 | 1. src1:第一张输入图像或标量值。2. src2:第二张输入图像或标量值。3. scale(可选):缩放因子(默认1.0)。4. dtype(可选):输出数据类型(如 cv2.CV_32F)。 |
| 返回值 | 乘法结果图像(numpy.ndarray)。 |
15.cv2.divide():
| 功能 | 对两张图像(或图像与标量)进行除法运算(支持饱和处理和类型转换)。 |
| 参数 | 1. src1:被除数图像或标量值。2. src2:除数图像或标量值。3. scale(可选):缩放因子(默认1.0)。4. dtype(可选):输出数据类型(如 cv2.CV_32F)。 |
| 返回值 | 除法结果图像(numpy.ndarray)。 |
16.cv2.bitwise_and():
| 功能 | 对两张图像(或图像与标量)进行按位与运算(像素级二进制AND操作)。 |
| 参数 | 1. src1:第一张输入图像或标量值。2. src2:第二张输入图像或标量值。3. mask(可选):掩膜,指定操作区域(仅对掩膜非零区域操作)。4. dst(可选):输出数组。 |
| 返回值 | 按位与结果图像(numpy.ndarray)。 |
关键特性:
-
二进制操作:对每个像素的二进制值逐位进行AND运算(同1得1,否则得0)。
-
掩膜应用:可通过
mask参数限定操作区域(非掩膜区域输出为0)。 -
典型用途:图像掩膜提取、ROI操作、位平面分析。
17.cv2.bitwise_or():
| 功能 | 对两张图像(或图像与标量)进行按位或运算(像素级二进制OR操作)。 |
| 参数 | 1. src1:第一张输入图像或标量值。2. src2:第二张输入图像或标量值。3. mask(可选):掩膜,指定操作区域(仅对掩膜非零区域操作)。4. dst(可选):输出数组。 |
| 返回值 | 按位或结果图像(numpy.ndarray)。 |
对比其他位操作:
-
cv2.bitwise_and():逻辑与(交集) -
cv2.bitwise_or():逻辑或(并集) -
cv2.bitwise_xor():逻辑异或(差异) -
cv2.bitwise_not():逻辑非(取反)
18.cv2.inRange():
| 功能 | 检查图像中像素值是否位于指定范围内,生成二值掩膜(符合范围=255,否则=0)。 |
| 参数 | 1. src:输入图像(单通道或多通道)。2. lowerb:范围下限(标量或数组,如 [min_B, min_G, min_R])。3. upperb:范围上限(标量或数组,如 [max_B, max_G, max_R])。 |
| 返回值 | 二值掩膜图像(numpy.ndarray,符合范围=255,否则=0)。 |
关键特性:
-
多通道支持:可直接处理彩色图像(需为
lowerb和upperb提供每个通道的阈值)。 -
典型用途:颜色过滤、背景分割、对象检测(如提取绿色区域)。
19.cv2.getRotationMatrix2D():
| 功能 | 生成一个 2D旋转矩阵,用于图像的旋转操作(围绕指定中心点旋转)。 |
| 参数 | 1. center:旋转中心坐标 (x, y)。2. angle:旋转角度(顺时针为正,单位:度)。3. scale:缩放因子(1.0表示不缩放)。 |
| 返回值 | 2×3的仿射变换矩阵(numpy.ndarray,可直接用于 cv2.warpAffine())。 |
关键特性:
-
旋转方向:角度为正值时顺时针旋转,负值逆时针旋转。
-
中心点:旋转围绕该点进行,若设为图像中心则保持旋转后内容在视野内。
-
缩放:可同时缩放图像(如
scale=0.5旋转并缩小一半)。
| 功能 | 对图像应用仿射变换(旋转、平移、缩放、倾斜等线性变换)。 |
| 参数 | 1. src:输入图像。2. M:2×3仿射变换矩阵(如 cv2.getRotationMatrix2D() 生成的矩阵)。3. dsize:输出图像尺寸 (width, height)。4. flags(可选):插值方法(如 cv2.INTER_LINEAR)。5. borderMode(可选):边界填充方式(如 cv2.BORDER_CONSTANT)。6. borderValue(可选):填充边界时的颜色(默认为黑色)。 |
| 返回值 | 变换后的图像(numpy.ndarray)。 |
关键特性:
-
仿射变换:保持直线和平行性,适用于旋转、平移、缩放等操作。
-
插值方法:推荐
cv2.INTER_LINEAR(平衡速度与质量)或cv2.INTER_CUBIC(高质量)。 -
边界处理:超出原图范围的区域默认填充黑色,可通过
borderValue修改(如填充白色)。
21.cv2.flip():
| 功能 | 对图像进行翻转操作(水平、垂直或双向翻转)。 |
| 参数 | 1. src:输入图像。2. flipCode:翻转方向控制:• 0:垂直翻转(沿X轴)• 1:水平翻转(沿Y轴)• -1:双向翻转(先水平后垂直) |
| 返回值 | 翻转后的图像(numpy.ndarray)。 |
关键特性:
-
原地操作:不修改原图,返回新图像。
-
无插值:直接像素映射,速度极快。
-
多通道支持:彩色图像(BGR/RGB)也可直接翻转。
22.cv2.resize():
| 项目 | 说明 |
|---|---|
| 功能 | 调整图像尺寸(放大或缩小)。 |
| 参数 | 1. src:输入图像。2. dsize:目标尺寸 (width, height)。3. fx, fy(可选):沿x/y轴的缩放因子(与dsize二选一)。4. interpolation(可选):插值方法(默认cv2.INTER_LINEAR)。 |
| 返回值 | 缩放后的图像(numpy.ndarray)。 |
常用插值方法:
-
cv2.INTER_NEAREST:最近邻(速度快,质量低)。 -
cv2.INTER_LINEAR:双线性(默认,平衡速度与质量)。 -
cv2.INTER_CUBIC:双三次(高质量,适合放大)。 -
cv2.INTER_AREA:区域插值(适合缩小)。
注意:
-
dsize参数格式为(宽度, 高度),与 numpy 的(行, 列)相反。 -
同时指定
dsize和fx/fy时,dsize优先生效。
23.cv2.getPerspectiveTransform():
| 功能 | 计算 透视变换矩阵(从4个源点映射到4个目标点的3×3变换矩阵)。 |
| 参数 | 1. src:源图像中4个点的坐标(np.float32格式,形如[[x1,y1],...,[x4,y4]])。2. dst:目标图像中对应的4个点坐标(格式同src)。 |
| 返回值 | 3×3透视变换矩阵(numpy.ndarray,用于cv2.warpPerspective())。 |
关键特性
-
点对要求:
-
需要 精确4组对应点(不能多或少)。
-
点顺序需一致(如左上、右上、左下、右下)。
-
注意事项
-
输入点类型:必须是
np.float32,否则报错。 -
点顺序一致性:若源点与目标点顺序不匹配,会导致扭曲异常。
-
与仿射变换区别:透视变换需要4个点(仿射变换仅需3个点)。
24.cv2.warpPerspective():
| 功能 | 对图像应用透视变换(将图像投影到新的视角平面,如倾斜矫正、视角转换)。 |
| 参数 | 1. src:输入图像。2. M:3×3透视变换矩阵(来自cv2.getPerspectiveTransform())。3. dsize:输出图像尺寸 (width, height)。4. flags(可选):插值方法(如 cv2.INTER_LINEAR)。5. borderMode(可选):边界填充方式(如 cv2.BORDER_CONSTANT)。6. borderValue(可选):填充颜色(默认为黑色)。 |
| 返回值 | 透视变换后的图像(numpy.ndarray)。 |
核心特性
-
透视变换矩阵
-
需通过
cv2.getPerspectiveTransform()或手动计算得到3×3矩阵。
-
-
插值方法
-
cv2.INTER_LINEAR(默认):平衡速度与质量。 -
cv2.INTER_CUBIC:高质量,适合放大。 -
cv2.INTER_NEAREST:速度快但锯齿明显。
-
-
边界处理
-
默认填充黑色(
borderValue=(0, 0, 0)),可设置为白色或其他颜色。
-
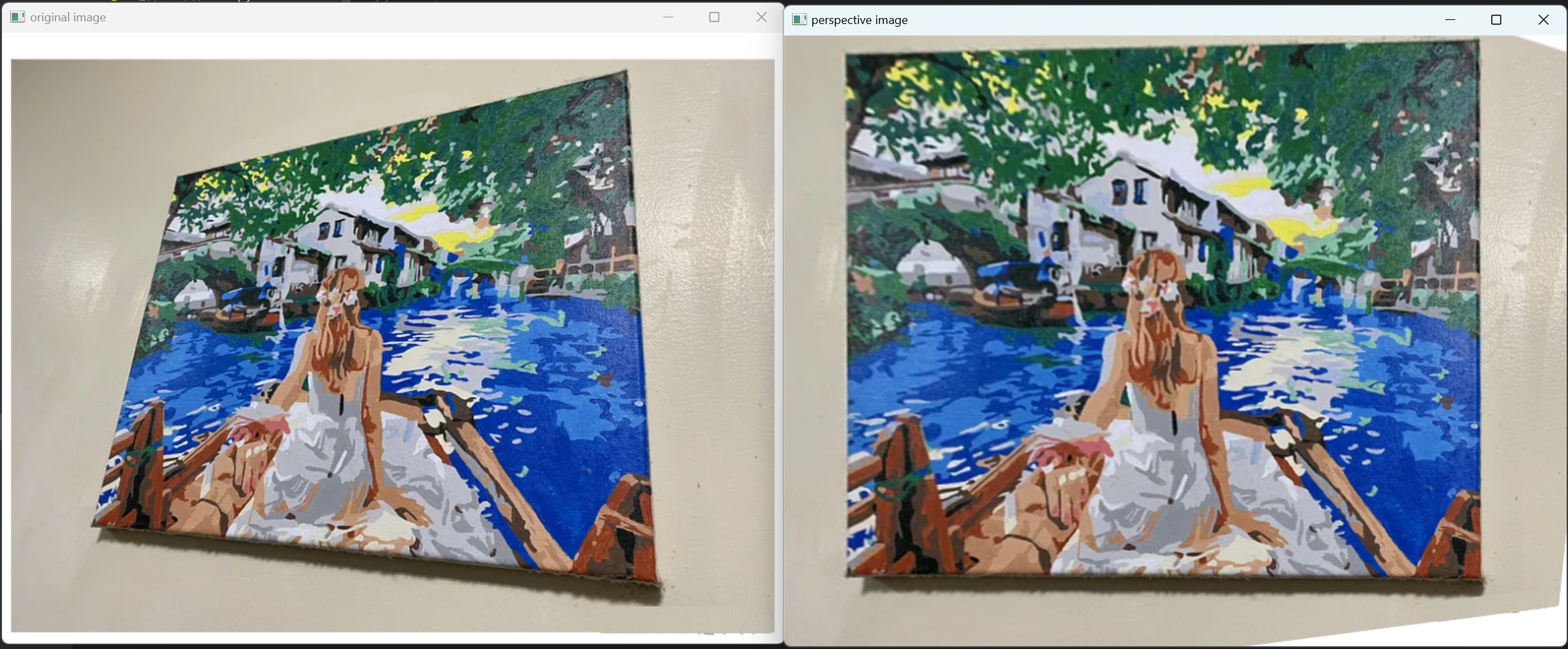
透视变换练习1:
import cv2
import numpy as np
img = cv2.imread('../images/youhua.png')
cv2.imshow("original image", img)
h, w, _ = img.shape
# 源图像中四个角点
src = np.array([[170, 140],
[630, 40],
[80, 500],
[660, 560]], dtype="float32")
# 目标图像中四个点
dst = np.array([[50, 10],
[700, 10],
[50, 550],
[700, 550]], dtype="float32")
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(src, dst)
# 指定背景为白色
per_img = cv2.warpPerspective(img, M, (w, h), borderValue=(255, 255, 255))
cv2.imshow("perspective image", per_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
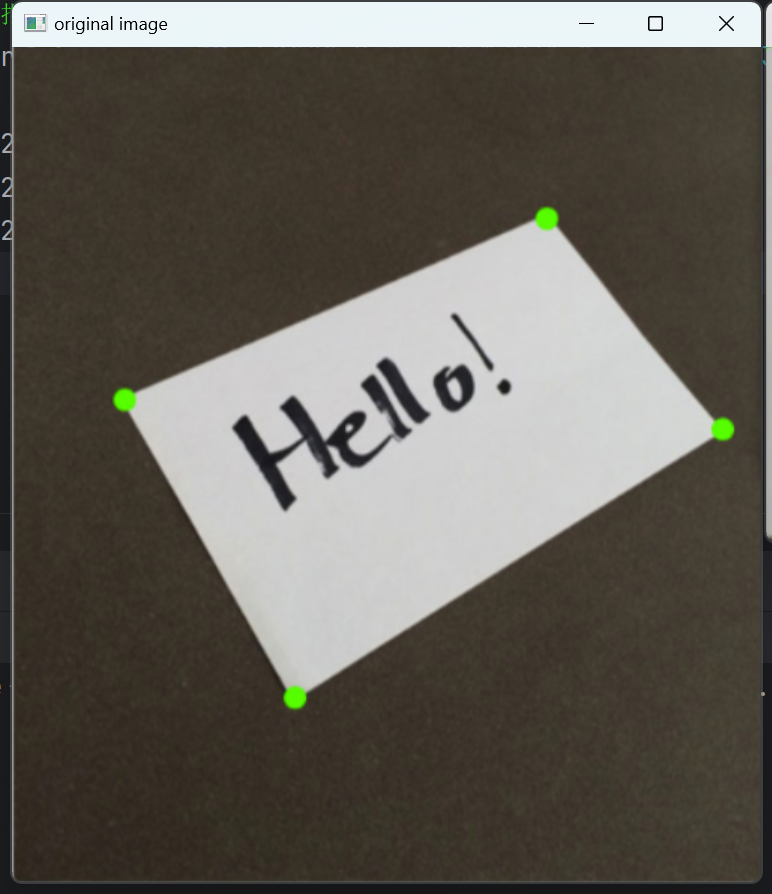
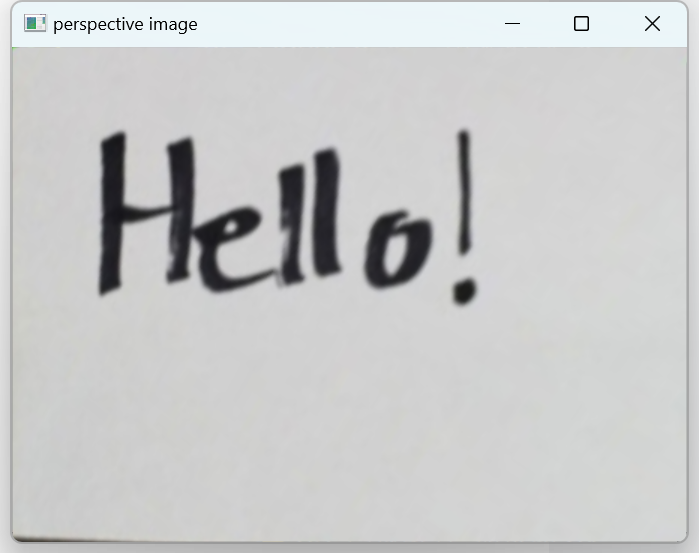
透视变换练习2:
import cv2
import numpy as np
img = cv2.imread('../images/hello.png')
cv2.imshow("original image", img)
h, w, _ = img.shape
# 源图像中四个角点
src = np.float32([
[80, 240],
[350, 120],
[200, 430],
[450, 258]
])
# 目标图像中四个点
dst = np.float32([
[0, 0],
[450, 0],
[0, 330],
[450, 330]
])
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(src, dst)
# 指定背景为白色
per_img = cv2.warpPerspective(img, M, (450, 330), borderValue=(255, 255, 255))
cv2.imshow("perspective image", per_img)
cv2.waitKey(0)
cv2.destroyAllWindows()