引言
基于 STM32F103C8T6 最小系统板完成电机控制。这个小项目采用 HAL 库方法实现,通过 CubeMAX 配置相关引脚,步进电机使用 28BYJ-48 (四相五线式步进电机),程序通过蓝牙连接手机 APP 端进行数据收发, OLED 显示当前步进电机角度,并且手机收到数据的同时返回云端保存,记录下当前电机角度。
对于 28BYJ-48 步进电机,其工作原理基于电磁感应。当定子的某一相绕组通电时,会产生磁场,吸引转子转动。通过按照一定的顺序依次给各相绕组通电,就可以使转子按照预定的方向逐步转动。常见的通电方式有单四拍、双四拍和八拍等。
一、STM32F103C8T6
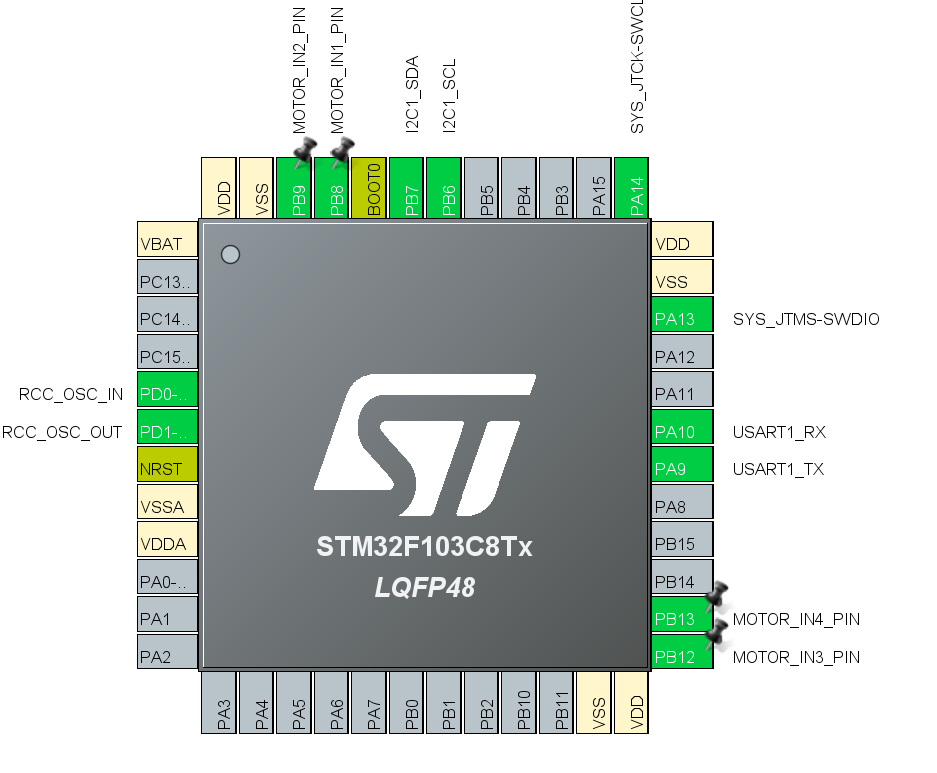
芯片对应引脚信息如下:(我这里使用的是 普中-精灵1 开发板)

1. 硬件传感器连接
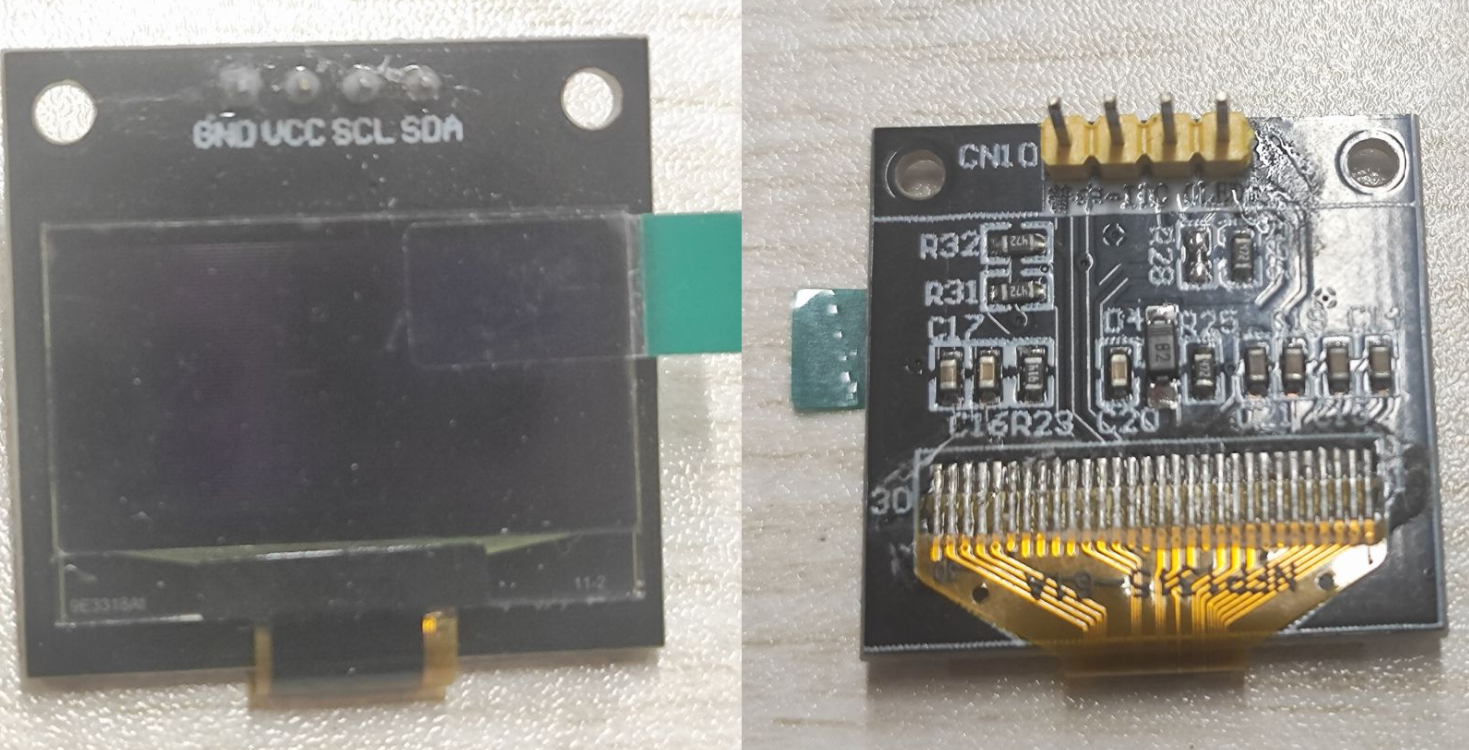
OLED:0.96寸OLED,四针。
对应引脚:VCC --------> VCC
GND --------> GND
SCL ---------> PB6
SDA ---------> PB7
蓝牙:HC-08,低功耗蓝牙(BLE),六针。
对应引脚:VCC --------> VCC
GND --------> GND
RXD --------> TXD(PA9)
TXD --------> RXD(PA10)
(PS:我这里蓝牙使用的是串口1---USART1)

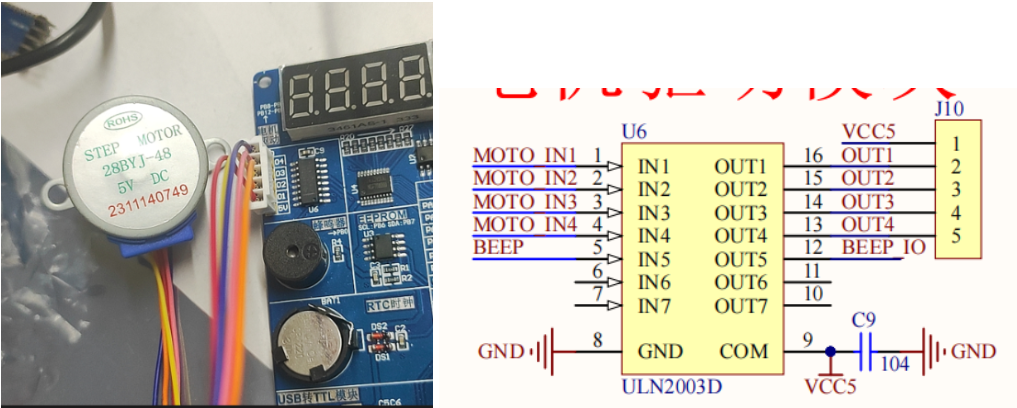
步进电机:28BYJ-48
驱动板 ULN2003D :IN1 --------> MOTO IN1(PB8)
IN2 --------> MOTO IN2(PB9)
IN3 --------> MOTO IN3(PB12)
IN4 --------> MOTO IN4(PB13)
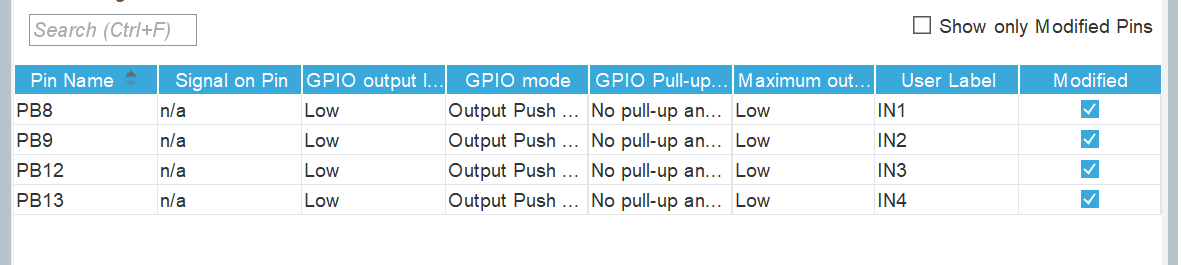
2. CubeMAX配置
开放电机对应的四个引脚
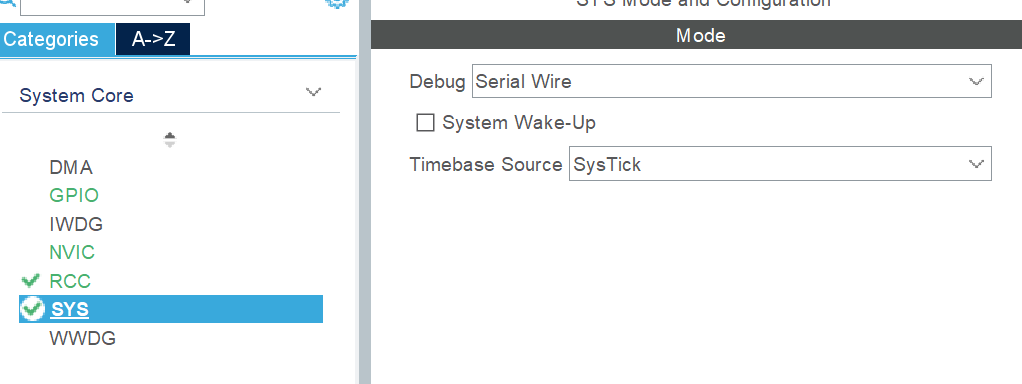
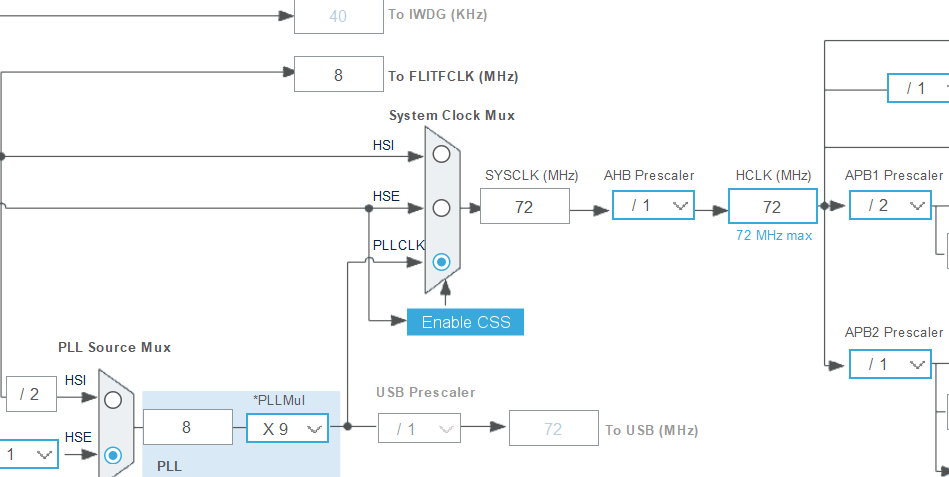
开启时钟,使用的是晶振。

有线(SW调试接口)---- 我使用 ST-link 下载器
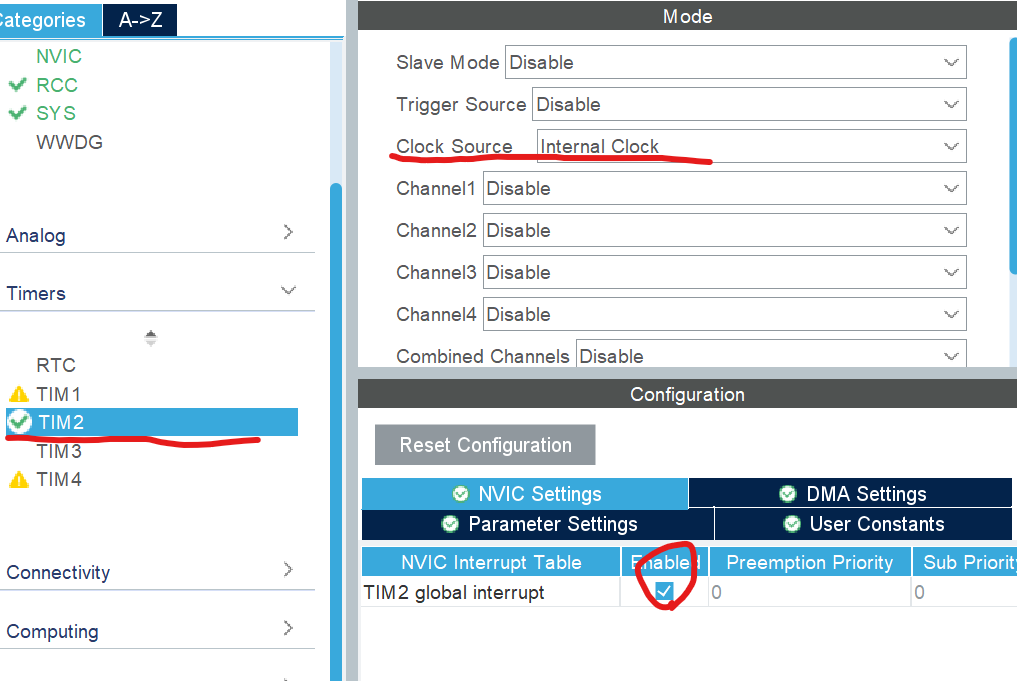
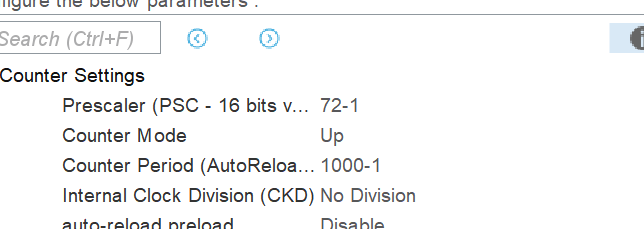
开启定时器2,内部时钟,开启中断,配置PSC和ARR。
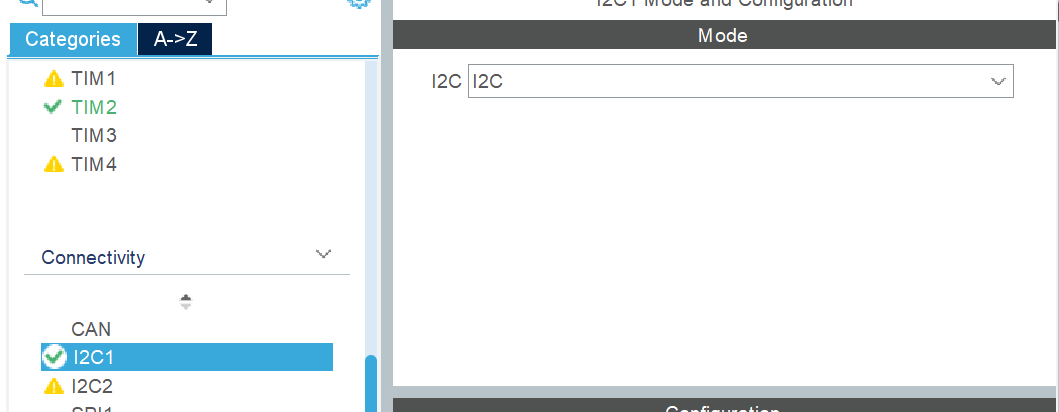
打开 OLED 需要的I2C1
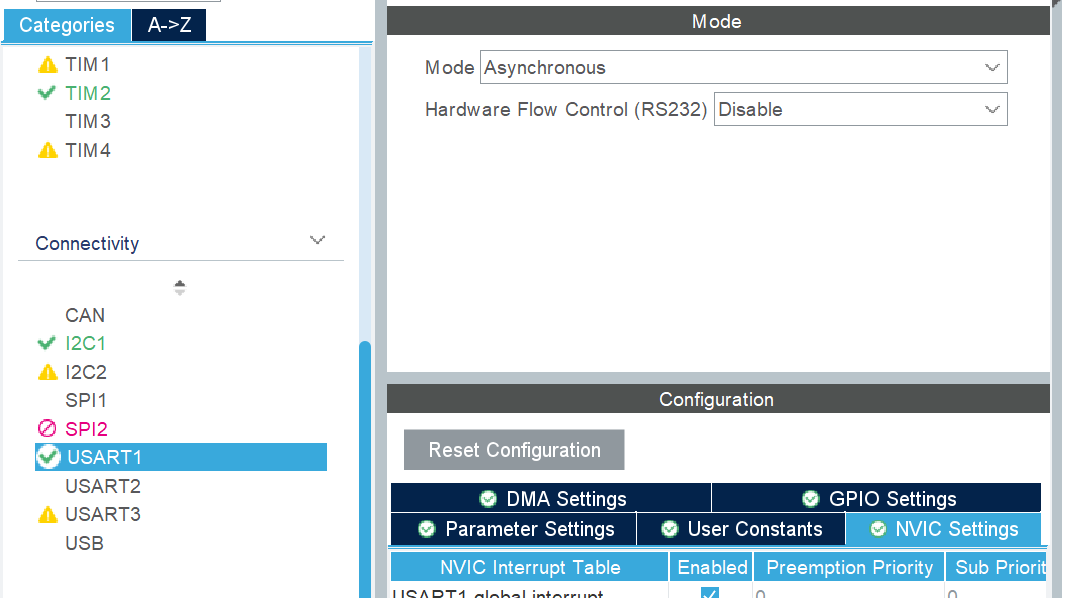
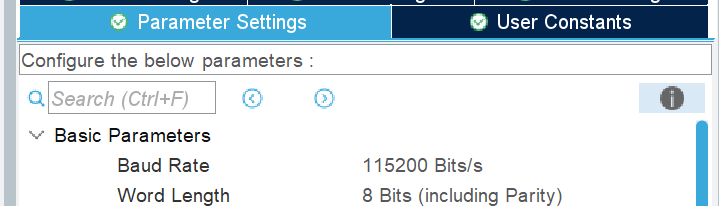
蓝牙使用的串口1(串口波特率默认为 115200,一般蓝牙默认也是如此,若蓝牙和串口1的不相同,更改其一使他们相同即可)
引脚设置完成后,芯片大致如下:
配置时钟频率
选择路径,勾选 Keil 代码显示 .c .h文件
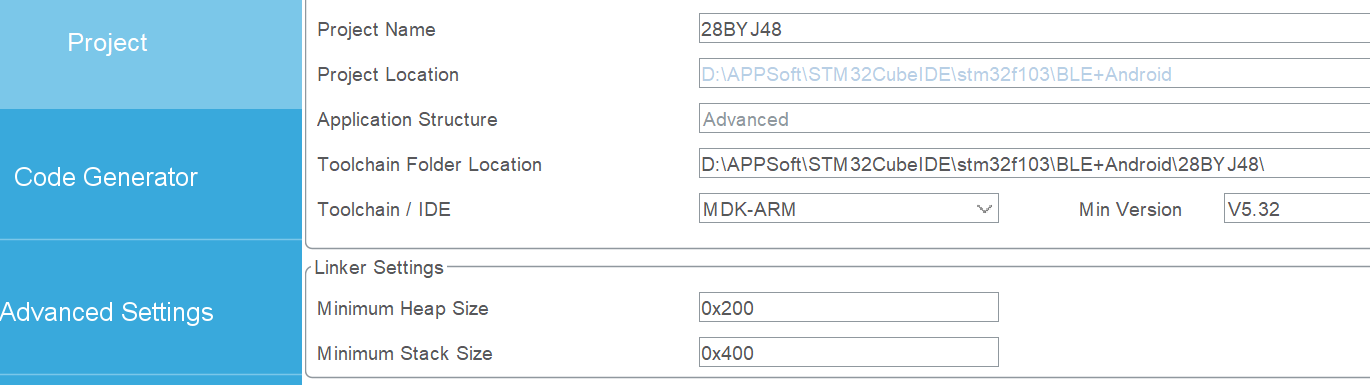

点击 GENERATE CODE 生成相关代码

3. Keil5代码相关
自动生成相关 Keil 5 代码函数,如下:

OLED相关
添加oled相关函数(就是市面上通用的oled例程--SSD1306驱动器)
#include "oled.h"
#include "oledfont.h"
#include "main.h"
#include <stdio.h>
#include <stdarg.h>
extern I2C_HandleTypeDef hi2c1;
static uint8_t OLED_GRAM[128][8];
/**
* @brief write data/command to OLED, if you use spi, please rewrite the function
* @param[in] dat: the data ready to write
* @param[in] cmd: OLED_CMD means command; OLED_DATA means data
* @retval none
*/
/**
* @brief 写数据或者指令到OLED, 如果使用的是SPI,请重写这个函数
* @param[in] dat: 要写入的字节
* @param[in] cmd: OLED_CMD 代表写入的字节是指令; OLED_DATA 代表写入的字节是数据
* @retval none
*/
void oled_write_byte(uint8_t dat, uint8_t cmd)
{
static uint8_t cmd_data[2];
if(cmd == OLED_CMD)
{
cmd_data[0] = 0x00;
}
else
{
cmd_data[0] = 0x40;
}
cmd_data[1] = dat;
HAL_I2C_Master_Transmit(&hi2c1, OLED_I2C_ADDRESS, cmd_data, 2, 10);
}
/**
* @brief initialize the oled device
* @param[in] none
* @retval none
*/
/**
* @brief 初始化OLED模块,
* @param[in] none
* @retval none
*/
void OLED_init(void)
{
oled_write_byte(0xAE, OLED_CMD); //display off
oled_write_byte(0x20, OLED_CMD); //Set Memory Addressing Mode
oled_write_byte(0x10, OLED_CMD); //00,Horizontal Addressing Mode;01,Vertical Addressing Mode;10,Page Addressing Mode (RESET);11,Invalid
oled_write_byte(0xb0, OLED_CMD); //Set Page Start Address for Page Addressing Mode,0-7
oled_write_byte(0xc8, OLED_CMD); //Set COM Output Scan Direction
oled_write_byte(0x00, OLED_CMD); //---set low column address
oled_write_byte(0x10, OLED_CMD); //---set high column address
oled_write_byte(0x40, OLED_CMD); //--set start line address
oled_write_byte(0x81, OLED_CMD); //--set contrast control register
oled_write_byte(0xff, OLED_CMD); //brightness 0x00~0xff
oled_write_byte(0xa1, OLED_CMD); //--set segment re-map 0 to 127
oled_write_byte(0xa6, OLED_CMD); //--set normal display
oled_write_byte(0xa8, OLED_CMD); //--set multiplex ratio(1 to 64)
oled_write_byte(0x3F, OLED_CMD); //
oled_write_byte(0xa4, OLED_CMD); //0xa4,Output follows RAM content;0xa5,Output ignores RAM content
oled_write_byte(0xd3, OLED_CMD); //-set display offset
oled_write_byte(0x00, OLED_CMD); //-not offset
oled_write_byte(0xd5, OLED_CMD); //--set display clock divide ratio/oscillator frequency
oled_write_byte(0xf0, OLED_CMD); //--set divide ratio
oled_write_byte(0xd9, OLED_CMD); //--set pre-charge period
oled_write_byte(0x22, OLED_CMD); //
oled_write_byte(0xda, OLED_CMD); //--set com pins hardware configuration
oled_write_byte(0x12, OLED_CMD);
oled_write_byte(0xdb, OLED_CMD); //--set vcomh
oled_write_byte(0x20, OLED_CMD); //0x20,0.77xVcc
oled_write_byte(0x8d, OLED_CMD); //--set DC-DC enable
oled_write_byte(0x14, OLED_CMD); //
oled_write_byte(0xaf, OLED_CMD); //--turn on oled panel
}
/**
* @brief turn on OLED display
* @param[in] none
* @retval none
*/
/**
* @brief 打开OLED显示
* @param[in] none
* @retval none
*/
void OLED_display_on(void)
{
oled_write_byte(0x8d, OLED_CMD);
oled_write_byte(0x14, OLED_CMD);
oled_write_byte(0xaf, OLED_CMD);
}
/**
* @brief turn off OLED display
* @param[in] none
* @retval none
*/
/**
* @brief 关闭OLED显示
* @param[in] none
* @retval none
*/
void OLED_display_off(void)
{
oled_write_byte(0x8d, OLED_CMD);
oled_write_byte(0x10, OLED_CMD);
oled_write_byte(0xae, OLED_CMD);
}
/**
* @brief operate the graphic ram(size: 128*8 char)
* @param[in] pen: the type of operate.
PEN_CLEAR: set ram to 0x00
PEN_WRITE: set ram to 0xff
PEN_INVERSION: bit inversion
* @retval none
*/
/**
* @brief 操作GRAM内存(128*8char数组)
* @param[in] pen: 操作类型.
PEN_CLEAR: 设置为0x00
PEN_WRITE: 设置为0xff
PEN_INVERSION: 按位取反
* @retval none
*/
void OLED_operate_gram(pen_typedef pen)
{
uint8_t i, n;
for (i = 0; i < 8; i++)
{
for (n = 0; n < 128; n++)
{
if (pen == PEN_WRITE)
{
OLED_GRAM[n][i] = 0xff;
}
else if (pen == PEN_CLEAR)
{
OLED_GRAM[n][i] = 0x00;
}
else
{
OLED_GRAM[n][i] = 0xff - OLED_GRAM[n][i];
}
}
}
}
/**
* @brief cursor set to (x,y) point
* @param[in] x:X-axis, from 0 to 127
* @param[in] y:Y-axis, from 0 to 7
* @retval none
*/
/**
* @brief 设置光标起点(x,y)
* @param[in] x:x轴, 从 0 到 127
* @param[in] y:y轴, 从 0 到 7
* @retval none
*/
void OLED_set_pos(uint8_t x, uint8_t y)
{
oled_write_byte((0xb0 + y), OLED_CMD); //set page address y
oled_write_byte(((x&0xf0)>>4)|0x10, OLED_CMD); //set column high address
oled_write_byte((x&0x0f), OLED_CMD); //set column low address
}
/**
* @brief draw one bit of graphic raw, operate one point of screan(128*64)
* @param[in] x: x-axis, [0, X_WIDTH-1]
* @param[in] y: y-axis, [0, Y_WIDTH-1]
* @param[in] pen: type of operation,
PEN_CLEAR: set (x,y) to 0
PEN_WRITE: set (x,y) to 1
PEN_INVERSION: (x,y) value inversion
* @retval none
*/
/**
* @brief 操作GRAM中的一个位,相当于操作屏幕的一个点
* @param[in] x:x轴, [0,X_WIDTH-1]
* @param[in] y:y轴, [0,Y_WIDTH-1]
* @param[in] pen: 操作类型,
PEN_CLEAR: 设置 (x,y) 点为 0
PEN_WRITE: 设置 (x,y) 点为 1
PEN_INVERSION: (x,y) 值反转
* @retval none
*/
void OLED_draw_point(int8_t x, int8_t y, pen_typedef pen)
{
uint8_t page = 0, row = 0;
/* check the corrdinate */
if ((x < 0) || (x > (X_WIDTH - 1)) || (y < 0) || (y > (Y_WIDTH - 1)))
{
return;
}
page = y / 8;
row = y % 8;
if (pen == PEN_WRITE)
{
OLED_GRAM[x][page] |= 1 << row;
}
else if (pen == PEN_INVERSION)
{
OLED_GRAM[x][page] ^= 1 << row;
}
else
{
OLED_GRAM[x][page] &= ~(1 << row);
}
}
/**
* @brief draw a line from (x1, y1) to (x2, y2)
* @param[in] x1: the start point of line
* @param[in] y1: the start point of line
* @param[in] x2: the end point of line
* @param[in] y2: the end point of line
* @param[in] pen: type of operation,PEN_CLEAR,PEN_WRITE,PEN_INVERSION.
* @retval none
*/
/**
* @brief 画一条直线,从(x1,y1)到(x2,y2)
* @param[in] x1: 起点
* @param[in] y1: 起点
* @param[in] x2: 终点
* @param[in] y2: 终点
* @param[in] pen: 操作类型,PEN_CLEAR,PEN_WRITE,PEN_INVERSION.
* @retval none
*/
void OLED_draw_line(uint8_t x1, uint8_t y1, uint8_t x2, uint8_t y2, pen_typedef pen)
{
uint8_t col = 0, row = 0;
uint8_t x_st = 0, x_ed = 0, y_st = 0, y_ed = 0;
float k = 0.0f, b = 0.0f;
if (y1 == y2)
{
(x1 <= x2) ? (x_st = x1):(x_st = x2);
(x1 <= x2) ? (x_ed = x2):(x_ed = x1);
for (col = x_st; col <= x_ed; col++)
{
OLED_draw_point(col, y1, pen);
}
}
else if (x1 == x2)
{
(y1 <= y2) ? (y_st = y1):(y_st = y2);
(y1 <= y2) ? (y_ed = y2):(y_ed = y1);
for (row = y_st; row <= y_ed; row++)
{
OLED_draw_point(x1, row, pen);
}
}
else
{
k = ((float)(y2 - y1)) / (x2 - x1);
b = (float)y1 - k * x1;
(x1 <= x2) ? (x_st = x1):(x_st = x2);
(x1 <= x2) ? (x_ed = x2):(x_ed = x2);
for (col = x_st; col <= x_ed; col++)
{
OLED_draw_point(col, (uint8_t)(col * k + b), pen);
}
}
}
/**
* @brief show a character
* @param[in] row: start row of character
* @param[in] col: start column of character
* @param[in] chr: the character ready to show
* @retval none
*/
/**
* @brief 显示一个字符
* @param[in] row: 字符的开始行
* @param[in] col: 字符的开始列
* @param[in] chr: 字符
* @retval none
*/
void OLED_show_char(uint8_t row, uint8_t col, uint8_t chr)
{
uint8_t x = col * 6;
uint8_t y = row * 12;
uint8_t temp, t, t1;
uint8_t y0 = y;
chr = chr - ' ';
for (t = 0; t < 12; t++)
{
temp = asc2_1206[chr][t];
for (t1 = 0; t1 < 8; t1++)
{
if (temp&0x80)
OLED_draw_point(x, y, PEN_WRITE);
else
OLED_draw_point(x, y, PEN_CLEAR);
temp <<= 1;
y++;
if ((y - y0) == 12)
{
y = y0;
x++;
break;
}
}
}
}
/**
* @brief show a character string
* @param[in] row: row of character string begin
* @param[in] col: column of character string begin
* @param[in] chr: the pointer to character string
* @retval none
*/
/**
* @brief 显示一个字符串
* @param[in] row: 字符串的开始行
* @param[in] col: 字符串的开始列
* @param[in] chr: 字符串
* @retval none
*/
void OLED_show_string(uint8_t row, uint8_t col, uint8_t *chr)
{
uint8_t n =0;
uint8_t max_len = 21 - col; // 每行最多显示21个字符(128/6≈21)
// 先填充空格覆盖旧内容
for (n = 0; n < max_len; n++) {
OLED_show_char(row, col + n, ' ');
}
// 再显示新内容
n = 0;
while (chr[n] != '\0')
{
OLED_show_char(row, col, chr[n]);
col++;
if (col > 20)
{
col = 0;
row += 1;
}
n++;
}
OLED_refresh_gram();
}
/**
* @brief formatted output in oled 128*64
* @param[in] row: row of character string begin, 0 <= row <= 4;
* @param[in] col: column of character string begin, 0 <= col <= 20;
* @param *fmt: the pointer to format character string
* @note if the character length is more than one row at a time, the extra characters will be truncated
* @retval none
*/
/**
* @brief 格式输出
* @param[in] row: 开始列,0 <= row <= 4;
* @param[in] col: 开始行, 0 <= col <= 20;
* @param[in] *fmt:格式化输出字符串
* @note 如果字符串长度大于一行,额外的字符会换行
* @retval none
*/
void OLED_printf(uint8_t row, uint8_t col, const char *fmt,...)
{
static uint8_t LCD_BUF[128] = {0};
static va_list ap;
uint8_t remain_size = 0;
if ((row > 4) || (col > 20) )
{
return;
}
va_start(ap, fmt);
vsprintf((char *)LCD_BUF, fmt, ap);
va_end(ap);
remain_size = 21 - col;
LCD_BUF[remain_size] = '\0';
OLED_show_string(row, col, LCD_BUF);
}
/**
* @brief send the data of gram to oled sreen
* @param[in] none
* @retval none
*/
/**
* @brief 发送数据到OLED的GRAM
* @param[in] none
* @retval none
*/
void OLED_refresh_gram(void)
{
uint8_t i, n;
for (i = 0; i < 8; i++)
{
OLED_set_pos(0, i);
for (n = 0; n < 128; n++)
{
oled_write_byte(OLED_GRAM[n][i], OLED_DATA);
}
}
}
/**
* @brief show the logo of RoboMaster
* @param[in] none
* @retval none
*/
/**
* @brief 显示RM的LOGO
* @param[in] none
* @retval none
*/
void OLED_LOGO(void)
{
uint8_t temp_char = 0;
uint8_t x = 0, y = 0;
uint8_t i = 0;
OLED_operate_gram(PEN_CLEAR);
for(; y < 64; y += 8)
{
for(x = 0; x < 128; x++)
{
temp_char = LOGO_BMP[x][y/8];
for(i = 0; i < 8; i++)
{
if(temp_char & 0x80)
{
OLED_draw_point(x, y + i,PEN_WRITE);
}
else
{
OLED_draw_point(x,y + i,PEN_CLEAR);
}
temp_char <<= 1;
}
}
}
OLED_refresh_gram();
}
oled.h
/**
****************************(C) COPYRIGHT 2019 DJI****************************
* @file oled.c/h
* @brief 0.96 inch oled use SSD1306 driver. the file includes oled initialization function,
* and some OLED setting function, GRAM operate function, oled show num ,char and string function,
* show RoboMaster LOGO function.
* 0.96OLED使用SSD1306驱动器,本文件包括初始化函数以及其他OLED设置函数, GRAM操作函数,oled显示数字,字符,字符串函数
* 以及显示RoboMaster LOGO函数
* @note
* @history
* Version Date Author Modification
* V1.0.0 Dec-26-2018 RM 1. done
*
@verbatim
==============================================================================
==============================================================================
@endverbatim
****************************(C) COPYRIGHT 2019 DJI****************************
*/
#ifndef _OLED_H_
#define _OLED_H_
#include "stm32f1xx_hal.h"
#include <stdint.h>
// the I2C address of oled
#define OLED_I2C_ADDRESS 0x78
//the resolution of oled 128*64
#define MAX_COLUMN 128
#define MAX_ROW 64
#define X_WIDTH MAX_COLUMN
#define Y_WIDTH MAX_ROW
#define OLED_CMD 0x00
#define OLED_DATA 0x01
#define CHAR_SIZE_WIDTH 6
#define CHAR_SIZE_HIGHT 12
typedef enum
{
PEN_CLEAR = 0x00,
PEN_WRITE = 0x01,
PEN_INVERSION= 0x02,
}pen_typedef;
/**
* @brief initialize the oled device
* @param[in] none
* @retval none
*/
/**
* @brief 初始化OLED模块,
* @param[in] none
* @retval none
*/
extern void OLED_init(void);
/**
* @brief turn on OLED display
* @param[in] none
* @retval none
*/
/**
* @brief 打开OLED显示
* @param[in] none
* @retval none
*/
extern void OLED_display_on(void);
/**
* @brief turn off OLED display
* @param[in] none
* @retval none
*/
/**
* @brief 关闭OLED显示
* @param[in] none
* @retval none
*/
extern void OLED_display_off(void);
/**
* @brief operate the graphic ram(size: 128*8 char)
* @param[in] pen: the type of operate.
PEN_CLEAR: set ram to 0x00
PEN_WRITE: set ram to 0xff
PEN_INVERSION: bit inversion
* @retval none
*/
/**
* @brief 操作GRAM内存(128*8char数组)
* @param[in] pen: 操作类型.
PEN_CLEAR: 设置为0x00
PEN_WRITE: 设置为0xff
PEN_INVERSION: 按位取反
* @retval none
*/
extern void OLED_operate_gram(pen_typedef pen);
/**
* @brief cursor set to (x,y) point
* @param[in] x:X-axis, from 0 to 127
* @param[in] y:Y-axis, from 0 to 7
* @retval none
*/
/**
* @brief 设置光标起点(x,y)
* @param[in] x:x轴, 从 0 到 127
* @param[in] y:y轴, 从 0 到 7
* @retval none
*/
extern void OLED_set_pos(uint8_t x, uint8_t y);
/**
* @brief draw one bit of graphic raw, operate one point of screan(128*64)
* @param[in] x: x-axis, [0, X_WIDTH-1]
* @param[in] y: y-axis, [0, Y_WIDTH-1]
* @param[in] pen: type of operation,
PEN_CLEAR: set (x,y) to 0
PEN_WRITE: set (x,y) to 1
PEN_INVERSION: (x,y) value inversion
* @retval none
*/
/**
* @brief 操作GRAM中的一个位,相当于操作屏幕的一个点
* @param[in] x:x轴, [0,X_WIDTH-1]
* @param[in] y:y轴, [0,Y_WIDTH-1]
* @param[in] pen: 操作类型,
PEN_CLEAR: 设置 (x,y) 点为 0
PEN_WRITE: 设置 (x,y) 点为 1
PEN_INVERSION: (x,y) 值反转
* @retval none
*/
extern void OLED_draw_point(int8_t x, int8_t y, pen_typedef pen);
/**
* @brief draw a line from (x1, y1) to (x2, y2)
* @param[in] x1: the start point of line
* @param[in] y1: the start point of line
* @param[in] x2: the end point of line
* @param[in] y2: the end point of line
* @param[in] pen: type of operation,PEN_CLEAR,PEN_WRITE,PEN_INVERSION.
* @retval none
*/
/**
* @brief 画一条直线,从(x1,y1)到(x2,y2)
* @param[in] x1: 起点
* @param[in] y1: 起点
* @param[in] x2: 终点
* @param[in] y2: 终点
* @param[in] pen: 操作类型,PEN_CLEAR,PEN_WRITE,PEN_INVERSION.
* @retval none
*/
extern void OLED_draw_line(uint8_t x1, uint8_t y1, uint8_t x2, uint8_t y2, pen_typedef pen);
/**
* @brief show a character
* @param[in] row: start row of character
* @param[in] col: start column of character
* @param[in] chr: the character ready to show
* @retval none
*/
/**
* @brief 显示一个字符
* @param[in] row: 字符的开始行
* @param[in] col: 字符的开始列
* @param[in] chr: 字符
* @retval none
*/
extern void OLED_show_char(uint8_t row, uint8_t col, uint8_t chr);
/**
* @brief show a character string
* @param[in] row: row of character string begin
* @param[in] col: column of character string begin
* @param[in] chr: the pointer to character string
* @retval none
*/
/**
* @brief 显示一个字符串
* @param[in] row: 字符串的开始行
* @param[in] col: 字符串的开始列
* @param[in] chr: 字符串
* @retval none
*/
extern void OLED_show_string(uint8_t row, uint8_t col, uint8_t *chr);
/**
* @brief formatted output in oled 128*64
* @param[in] row: row of character string begin, 0 <= row <= 4;
* @param[in] col: column of character string begin, 0 <= col <= 20;
* @param *fmt: the pointer to format character string
* @note if the character length is more than one row at a time, the extra characters will be truncated
* @retval none
*/
/**
* @brief 格式输出
* @param[in] row: 开始列,0 <= row <= 4;
* @param[in] col: 开始行, 0 <= col <= 20;
* @param[in] *fmt:格式化输出字符串
* @note 如果字符串长度大于一行,额外的字符会换行
* @retval none
*/
extern void OLED_printf(uint8_t row, uint8_t col, const char *fmt,...);
/**
* @brief send the data of gram to oled sreen
* @param[in] none
* @retval none
*/
/**
* @brief 发送数据到OLED的GRAM
* @param[in] none
* @retval none
*/
extern void OLED_refresh_gram(void);
/**
* @brief show the logo of RoboMaster
* @param[in] none
* @retval none
*/
/**
* @brief 显示RM的LOGO
* @param[in] none
* @retval none
*/
extern void OLED_LOGO(void);
#endif
oledfont.h
#ifndef __OLED__FONT__H
#define __OLED__FONT__H
//the common ascii character
const unsigned char asc2_1206[95][12]={
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",0*/
{0x00,0x00,0x00,0x00,0x3F,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*"!",1*/
{0x00,0x00,0x30,0x00,0x40,0x00,0x30,0x00,0x40,0x00,0x00,0x00},/*""",2*/
{0x09,0x00,0x0B,0xC0,0x3D,0x00,0x0B,0xC0,0x3D,0x00,0x09,0x00},/*"#",3*/
{0x18,0xC0,0x24,0x40,0x7F,0xE0,0x22,0x40,0x31,0x80,0x00,0x00},/*"$",4*/
{0x18,0x00,0x24,0xC0,0x1B,0x00,0x0D,0x80,0x32,0x40,0x01,0x80},/*"%",5*/
{0x03,0x80,0x1C,0x40,0x27,0x40,0x1C,0x80,0x07,0x40,0x00,0x40},/*"&",6*/
{0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"'",7*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x80,0x20,0x40,0x40,0x20},/*"(",8*/
{0x00,0x00,0x40,0x20,0x20,0x40,0x1F,0x80,0x00,0x00,0x00,0x00},/*")",9*/
{0x09,0x00,0x06,0x00,0x1F,0x80,0x06,0x00,0x09,0x00,0x00,0x00},/*"*",10*/
{0x04,0x00,0x04,0x00,0x3F,0x80,0x04,0x00,0x04,0x00,0x00,0x00},/*"+",11*/
{0x00,0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*",",12*/
{0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x00,0x00},/*"-",13*/
{0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*".",14*/
{0x00,0x20,0x01,0xC0,0x06,0x00,0x38,0x00,0x40,0x00,0x00,0x00},/*"/",15*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"0",16*/
{0x00,0x00,0x10,0x40,0x3F,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"1",17*/
{0x18,0xC0,0x21,0x40,0x22,0x40,0x24,0x40,0x18,0x40,0x00,0x00},/*"2",18*/
{0x10,0x80,0x20,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"3",19*/
{0x02,0x00,0x0D,0x00,0x11,0x00,0x3F,0xC0,0x01,0x40,0x00,0x00},/*"4",20*/
{0x3C,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x23,0x80,0x00,0x00},/*"5",21*/
{0x1F,0x80,0x24,0x40,0x24,0x40,0x34,0x40,0x03,0x80,0x00,0x00},/*"6",22*/
{0x30,0x00,0x20,0x00,0x27,0xC0,0x38,0x00,0x20,0x00,0x00,0x00},/*"7",23*/
{0x1B,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"8",24*/
{0x1C,0x00,0x22,0xC0,0x22,0x40,0x22,0x40,0x1F,0x80,0x00,0x00},/*"9",25*/
{0x00,0x00,0x00,0x00,0x08,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*":",26*/
{0x00,0x00,0x00,0x00,0x04,0x60,0x00,0x00,0x00,0x00,0x00,0x00},/*";",27*/
{0x00,0x00,0x04,0x00,0x0A,0x00,0x11,0x00,0x20,0x80,0x40,0x40},/*"<",28*/
{0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x00,0x00},/*"=",29*/
{0x00,0x00,0x40,0x40,0x20,0x80,0x11,0x00,0x0A,0x00,0x04,0x00},/*">",30*/
{0x18,0x00,0x20,0x00,0x23,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"?",31*/
{0x1F,0x80,0x20,0x40,0x27,0x40,0x29,0x40,0x1F,0x40,0x00,0x00},/*"@",32*/
{0x00,0x40,0x07,0xC0,0x39,0x00,0x0F,0x00,0x01,0xC0,0x00,0x40},/*"A",33*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"B",34*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x30,0x80,0x00,0x00},/*"C",35*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"D",36*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x40,0x30,0xC0,0x00,0x00},/*"E",37*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x00,0x30,0x00,0x00,0x00},/*"F",38*/
{0x0F,0x00,0x10,0x80,0x20,0x40,0x22,0x40,0x33,0x80,0x02,0x00},/*"G",39*/
{0x20,0x40,0x3F,0xC0,0x04,0x00,0x04,0x00,0x3F,0xC0,0x20,0x40},/*"H",40*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x00,0x00},/*"I",41*/
{0x00,0x60,0x20,0x20,0x20,0x20,0x3F,0xC0,0x20,0x00,0x20,0x00},/*"J",42*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x0B,0x00,0x30,0xC0,0x20,0x40},/*"K",43*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x00,0x40,0x00,0x40,0x00,0xC0},/*"L",44*/
{0x3F,0xC0,0x3C,0x00,0x03,0xC0,0x3C,0x00,0x3F,0xC0,0x00,0x00},/*"M",45*/
{0x20,0x40,0x3F,0xC0,0x0C,0x40,0x23,0x00,0x3F,0xC0,0x20,0x00},/*"N",46*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"O",47*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"P",48*/
{0x1F,0x80,0x21,0x40,0x21,0x40,0x20,0xE0,0x1F,0xA0,0x00,0x00},/*"Q",49*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x26,0x00,0x19,0xC0,0x00,0x40},/*"R",50*/
{0x18,0xC0,0x24,0x40,0x24,0x40,0x22,0x40,0x31,0x80,0x00,0x00},/*"S",51*/
{0x30,0x00,0x20,0x40,0x3F,0xC0,0x20,0x40,0x30,0x00,0x00,0x00},/*"T",52*/
{0x20,0x00,0x3F,0x80,0x00,0x40,0x00,0x40,0x3F,0x80,0x20,0x00},/*"U",53*/
{0x20,0x00,0x3E,0x00,0x01,0xC0,0x07,0x00,0x38,0x00,0x20,0x00},/*"V",54*/
{0x38,0x00,0x07,0xC0,0x3C,0x00,0x07,0xC0,0x38,0x00,0x00,0x00},/*"W",55*/
{0x20,0x40,0x39,0xC0,0x06,0x00,0x39,0xC0,0x20,0x40,0x00,0x00},/*"X",56*/
{0x20,0x00,0x38,0x40,0x07,0xC0,0x38,0x40,0x20,0x00,0x00,0x00},/*"Y",57*/
{0x30,0x40,0x21,0xC0,0x26,0x40,0x38,0x40,0x20,0xC0,0x00,0x00},/*"Z",58*/
{0x00,0x00,0x00,0x00,0x7F,0xE0,0x40,0x20,0x40,0x20,0x00,0x00},/*"[",59*/
{0x00,0x00,0x70,0x00,0x0C,0x00,0x03,0x80,0x00,0x40,0x00,0x00},/*"\",60*/
{0x00,0x00,0x40,0x20,0x40,0x20,0x7F,0xE0,0x00,0x00,0x00,0x00},/*"]",61*/
{0x00,0x00,0x20,0x00,0x40,0x00,0x20,0x00,0x00,0x00,0x00,0x00},/*"^",62*/
{0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10},/*"_",63*/
{0x00,0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"`",64*/
{0x00,0x00,0x02,0x80,0x05,0x40,0x05,0x40,0x03,0xC0,0x00,0x40},/*"a",65*/
{0x20,0x00,0x3F,0xC0,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"b",66*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x06,0x40,0x00,0x00},/*"c",67*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x24,0x40,0x3F,0xC0,0x00,0x40},/*"d",68*/
{0x00,0x00,0x03,0x80,0x05,0x40,0x05,0x40,0x03,0x40,0x00,0x00},/*"e",69*/
{0x00,0x00,0x04,0x40,0x1F,0xC0,0x24,0x40,0x24,0x40,0x20,0x00},/*"f",70*/
{0x00,0x00,0x02,0xE0,0x05,0x50,0x05,0x50,0x06,0x50,0x04,0x20},/*"g",71*/
{0x20,0x40,0x3F,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"h",72*/
{0x00,0x00,0x04,0x40,0x27,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"i",73*/
{0x00,0x10,0x00,0x10,0x04,0x10,0x27,0xE0,0x00,0x00,0x00,0x00},/*"j",74*/
{0x20,0x40,0x3F,0xC0,0x01,0x40,0x07,0x00,0x04,0xC0,0x04,0x40},/*"k",75*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x00,0x40,0x00,0x40,0x00,0x00},/*"l",76*/
{0x07,0xC0,0x04,0x00,0x07,0xC0,0x04,0x00,0x03,0xC0,0x00,0x00},/*"m",77*/
{0x04,0x40,0x07,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"n",78*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"o",79*/
{0x04,0x10,0x07,0xF0,0x04,0x50,0x04,0x40,0x03,0x80,0x00,0x00},/*"p",80*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x50,0x07,0xF0,0x00,0x10},/*"q",81*/
{0x04,0x40,0x07,0xC0,0x02,0x40,0x04,0x00,0x04,0x00,0x00,0x00},/*"r",82*/
{0x00,0x00,0x06,0x40,0x05,0x40,0x05,0x40,0x04,0xC0,0x00,0x00},/*"s",83*/
{0x00,0x00,0x04,0x00,0x1F,0x80,0x04,0x40,0x00,0x40,0x00,0x00},/*"t",84*/
{0x04,0x00,0x07,0x80,0x00,0x40,0x04,0x40,0x07,0xC0,0x00,0x40},/*"u",85*/
{0x04,0x00,0x07,0x00,0x04,0xC0,0x01,0x80,0x06,0x00,0x04,0x00},/*"v",86*/
{0x06,0x00,0x01,0xC0,0x07,0x00,0x01,0xC0,0x06,0x00,0x00,0x00},/*"w",87*/
{0x04,0x40,0x06,0xC0,0x01,0x00,0x06,0xC0,0x04,0x40,0x00,0x00},/*"x",88*/
{0x04,0x10,0x07,0x10,0x04,0xE0,0x01,0x80,0x06,0x00,0x04,0x00},/*"y",89*/
{0x00,0x00,0x04,0x40,0x05,0xC0,0x06,0x40,0x04,0x40,0x00,0x00},/*"z",90*/
{0x00,0x00,0x00,0x00,0x04,0x00,0x7B,0xE0,0x40,0x20,0x00,0x00},/*"{",91*/
{0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xF0,0x00,0x00,0x00,0x00},/*"|",92*/
{0x00,0x00,0x40,0x20,0x7B,0xE0,0x04,0x00,0x00,0x00,0x00,0x00},/*"}",93*/
{0x40,0x00,0x80,0x00,0x40,0x00,0x20,0x00,0x20,0x00,0x40,0x00},/*"~",94*/
};
//the logo of robomaster
const unsigned char LOGO_BMP[128][8] = {
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x06},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1E},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xF6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x72},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x7C},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x7C},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1E},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x40,0x00,0x00,0x00,0x00,0x00,0x00,0xFE},
{0x60,0x00,0x00,0x00,0x00,0x10,0x00,0x6C},
{0x70,0x00,0x00,0x00,0x00,0x30,0x00,0x00},
{0x78,0x00,0x00,0x00,0x00,0xF0,0x00,0x7C},
{0x7C,0x00,0x00,0x00,0x07,0xF0,0x00,0xFE},
{0x7E,0x00,0x00,0x00,0x3F,0xF0,0x00,0xC6},
{0x7F,0x00,0x00,0x01,0xFF,0xF0,0x00,0xC6},
{0x7F,0x80,0x00,0x0F,0xFF,0xF0,0x00,0xC6},
{0x7F,0xC0,0x00,0x7F,0xFF,0xF0,0x00,0xFE},
{0x7F,0xE0,0x03,0xFF,0xFF,0xF0,0x00,0x7C},
{0x7F,0xF0,0x3F,0xFF,0xFF,0xF0,0x00,0x02},
{0x7F,0xF8,0x3F,0xFF,0xFF,0xF0,0x00,0x06},
{0x7F,0xFC,0x3F,0xFF,0xFF,0xF0,0x00,0x1E},
{0x7F,0xFE,0x3F,0xFF,0xFF,0xF0,0x00,0xBC},
{0x7F,0xFF,0x3F,0xFF,0xFF,0xF0,0x00,0xE0},
{0x7F,0xFF,0xBF,0xFF,0xFF,0x80,0x00,0xF8},
{0x7F,0xFF,0xFF,0xFF,0xFC,0x00,0x00,0x3E},
{0x7F,0xFF,0xFF,0xFF,0xE0,0x00,0x00,0x0E},
{0x7F,0xFF,0xFF,0xFF,0x00,0x00,0x00,0xB8},
{0x7F,0xFF,0xFF,0xF8,0x00,0x00,0x00,0xE0},
{0x7F,0xFF,0xFF,0xF0,0x00,0x00,0x00,0xFE},
{0x7F,0xFF,0xFF,0xF0,0x00,0x00,0x00,0x1E},
{0x7F,0xFF,0xFF,0xF0,0x00,0x00,0x00,0x02},
{0x7F,0xFF,0xFF,0xF0,0x00,0x00,0x00,0x00},
{0x7F,0xEF,0xFF,0xF0,0x02,0x00,0x00,0x06},
{0x7F,0xE7,0xFF,0xF0,0x02,0x00,0x00,0x0E},
{0x7F,0xE3,0xFF,0xF0,0x02,0x00,0x00,0x1C},
{0x7F,0xE1,0xFF,0xF8,0x03,0x00,0x00,0xBA},
{0x7F,0xE0,0xFF,0xFC,0x03,0x00,0x00,0xF6},
{0x7F,0xE0,0x7F,0xFE,0x03,0x80,0x00,0xE6},
{0x7F,0xE0,0x3F,0xFF,0x03,0x80,0x00,0xF6},
{0x7F,0xE0,0x3F,0xFF,0x83,0xC0,0x00,0x3E},
{0x7F,0xE0,0x3F,0xFF,0xC3,0xC0,0x00,0x0E},
{0x7F,0xE0,0x3F,0xFF,0xE3,0xE0,0x00,0x02},
{0x7F,0xE0,0x3F,0xFF,0xF3,0xE0,0x00,0x00},
{0x7F,0xE0,0x3F,0xFF,0xFB,0xF0,0x00,0x02},
{0x7F,0xE0,0x3F,0xFF,0xFF,0xF0,0x00,0x66},
{0x7F,0xE0,0x3F,0xFF,0xFF,0xF8,0x00,0xF6},
{0x7F,0xE0,0x3F,0xFF,0xFF,0xF8,0x00,0xD6},
{0x7F,0xE0,0x3F,0xFF,0xFF,0xFC,0x00,0xD6},
{0x7F,0xF0,0x7F,0xFF,0xFF,0xFC,0x00,0xD6},
{0x7F,0xF8,0xFF,0xF7,0xFF,0xFE,0x00,0xD6},
{0x7F,0xFF,0xFF,0xF3,0xFF,0xFE,0x00,0xDE},
{0x3F,0xFF,0xFF,0xE1,0xFF,0xFF,0x00,0x8C},
{0x3F,0xFF,0xFF,0xE0,0xFF,0xCF,0x00,0x40},
{0x1F,0xFF,0xFF,0xC0,0x7F,0xC7,0x80,0xC0},
{0x1F,0xFF,0xFF,0xC0,0x3F,0xC3,0x80,0xC0},
{0x0F,0xFF,0xFF,0x80,0x1F,0xC1,0xC0,0xFE},
{0x07,0xFF,0xFF,0x00,0x0F,0xC0,0xC0,0xFE},
{0x03,0xFF,0xFE,0x00,0x07,0xC0,0x60,0xC0},
{0x01,0xFF,0xFC,0x00,0x03,0xC0,0x20,0xC0},
{0x00,0x7F,0xF0,0x00,0x01,0xC0,0x00,0x86},
{0x00,0x0F,0x80,0x00,0x00,0xC0,0x00,0x16},
{0x00,0x00,0x00,0x00,0x00,0x40,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD0},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC0},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x06},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1E},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD8},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xF6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x72},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x62},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xF6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xF6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xD6},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xDE},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x8C},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
};
#endif
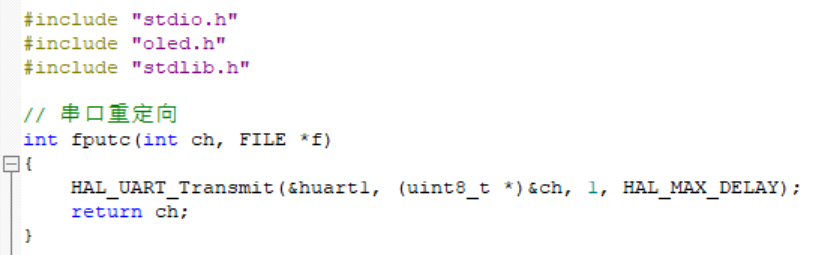
usart串口相关
main函数中添加串口重定向,方便串口打印,对应库记得加上。
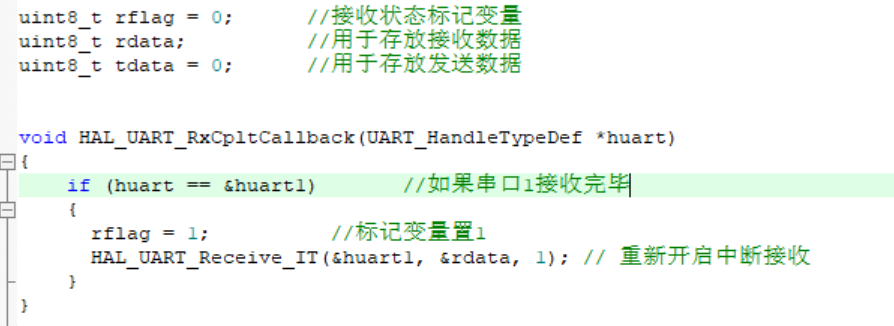
定义回调函数 --- HAL_UART_RxCpltCallback --- 用于在使用 HAL 库进行串口接收时处理接收完成事件。(连接蓝牙收发数据相关)
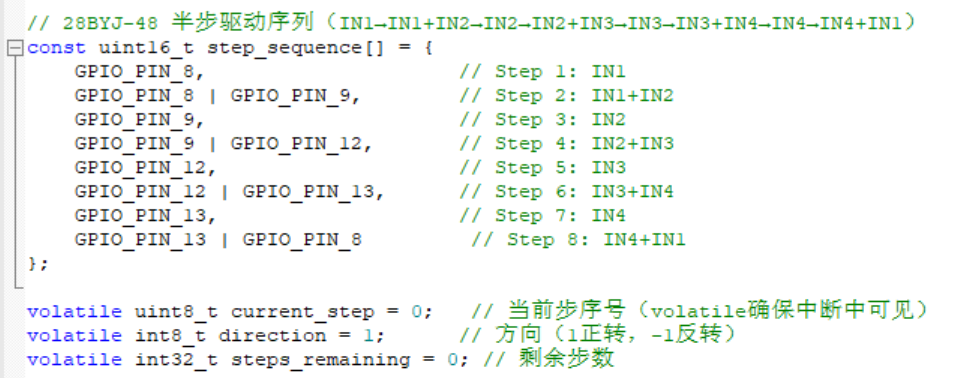
28BYJ-48 电机相关
定义电机半步驱动序列
定义回调函数 --- HAL_TIM_PeriodElapsedCallback --- 处理定时器的周期性中断事件。(驱动电机旋转相关)

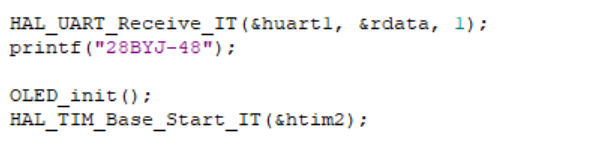
主函数内部实现
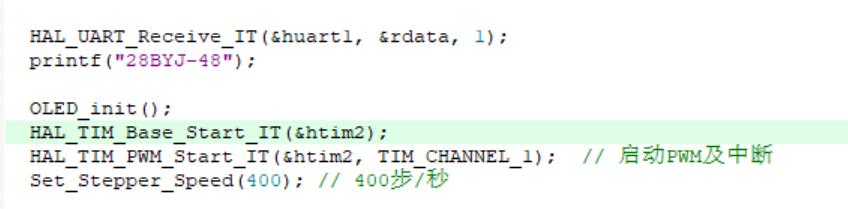
main() 函数里启用中断模式来接收 UART 数据,通过串口打印调试信息(printf),添加 oled 初始化函数,启动定时器的中断功能。
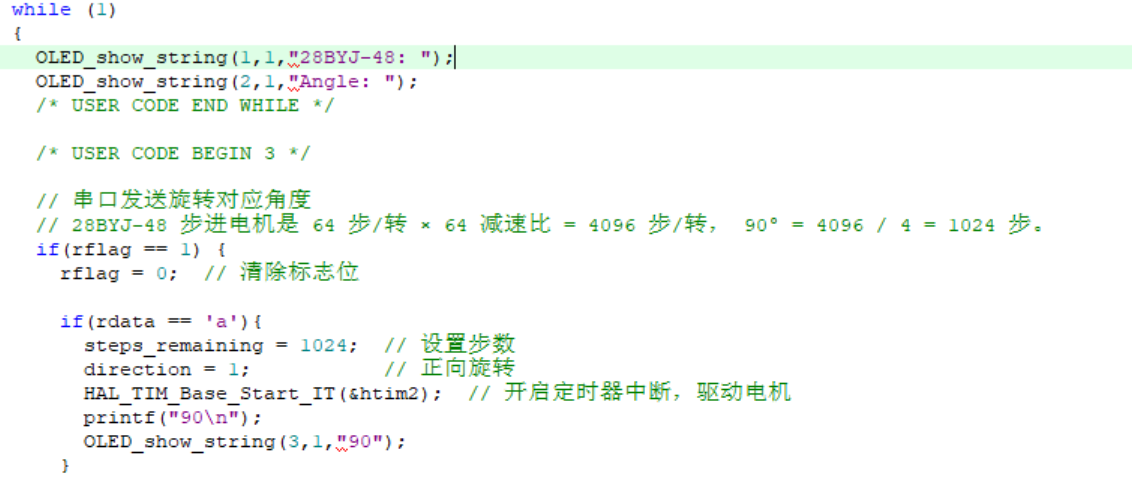
while()循环,在 oled 上显示信息,串口发送对应角度信息。如下图示例:
结束后重新启用串口接收中断。

4. 控制电机(方法扩展)
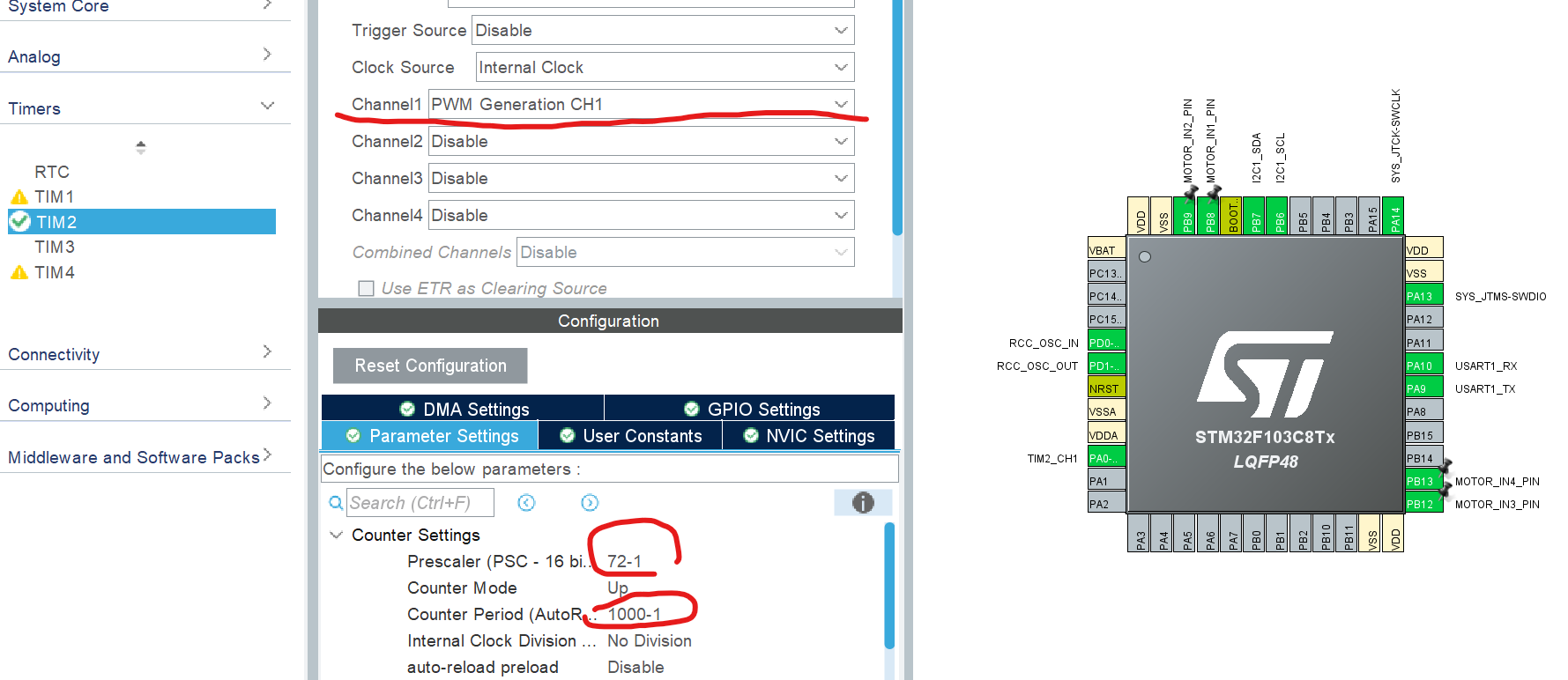
我们前面介绍了直接计算步长来实现对应角度旋转,现在以 PWM 频率为节拍,即用 PWM 方式来计时。28BYJ-48 是一种步进电机,而不是直流电机,不能直接用 PWM 占空比来控制转速或转向,需要控制四个线圈的步进顺序。
首先,对应 CubeMAX 引脚相关都不需要改动,需要改动的配置是 定时器2 ,我们将定时器2通道1设置为PWM输出,然后生成代码文件(这里注意,代码一定写在注释里,不然重新生成会覆盖掉)。
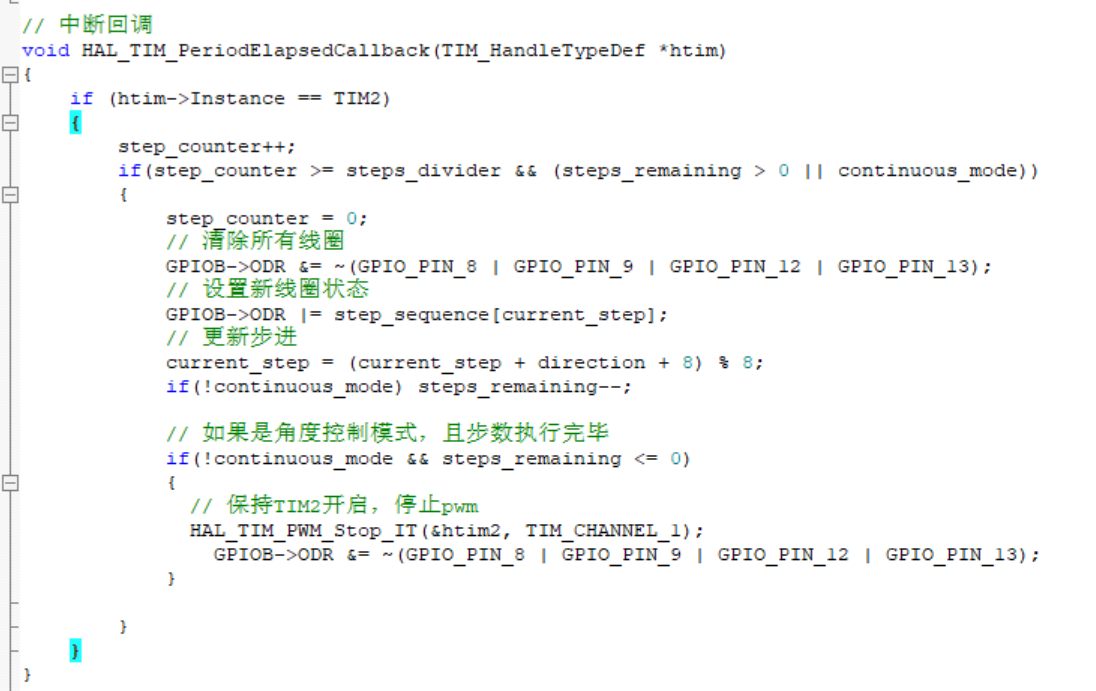
代码部分,前面串口重定向和串口回调函数都不需要变动,主要修改处为 中断回调函数。相关代码如下,我这里还添加了电机速度调控函数。
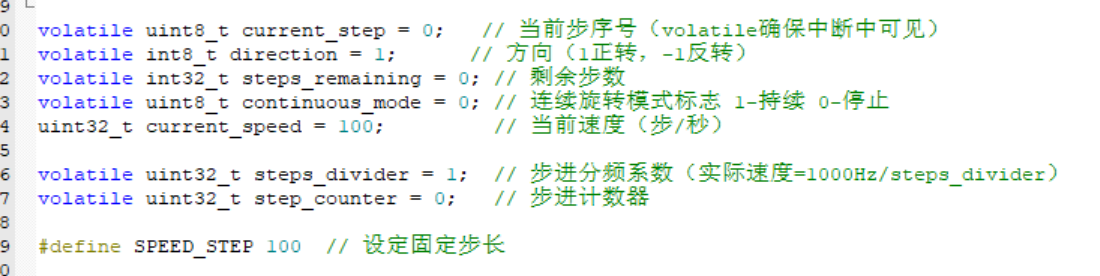
变量定义:
- volatile uint8_t current_step = 0;:当前步序号,使用volatile关键字确保在中断中也能正确访问和修改。
- volatile int8_t direction = 1;:电机旋转方向,1表示正转,-1表示反转。
- volatile int32_t steps_remaining = 0;:剩余步数。
- volatile uint8_t continuous_mode = 0;:连续旋转模式标志,1表示持续旋转,0表示停止。
- uint32_t current_speed = 100;:当前速度,单位为步/秒。
- volatile uint32_t steps_divider = 1;:步进分频系数,用于调整实际速度。
- volatile uint32_t step_counter = 0;:步进计数器,用于计算何时执行下一步。
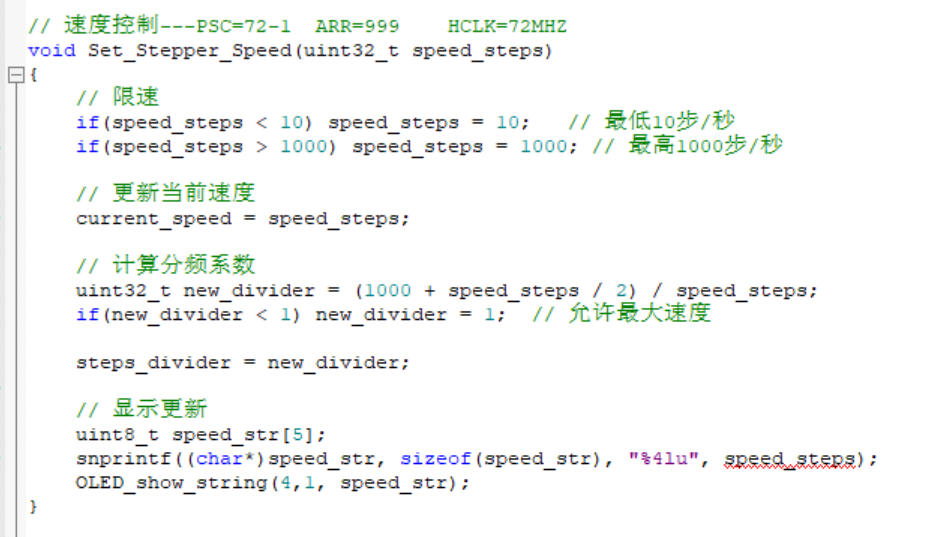
速度设置函数 Set_Stepper_Speed:
- 接收一个速度参数speed_steps,表示每秒的步数。
- 限制速度在10到1000步/秒之间。
- 根据速度计算新的分频系数steps_divider,以调整定时器中断频率,从而控制步进电机的速度。
- 更新当前速度并在OLED显示屏上显示。
中断回调 HAL_TIM_PeriodElapsedCallback:
- 当定时器(TIM2)周期结束时调用。
- 增加步进计数器step_counter。
- 如果计数器达到分频系数steps_divider且剩余步数大于0或处于连续旋转模式,则执行步进操作:
- 清除所有线圈(GPIO引脚)的输出。
- 根据当前步序号current_step和旋转方向direction设置新的线圈状态。
- 更新当前步序号。
- 如果不是连续旋转模式,则减少剩余步数。
- 如果剩余步数为0且不是连续旋转模式,则停止PWM输出并清除所有线圈状态。
main 函数中定义相关控制,我们在初始化这段加入 pwm 启动,同时定义电机初始转速为 400步/s 。
然后在 while 循环中加入控制代码:
命令处理:
- 启动/停止:如果接收到 'm',电机将以连续模式启动并顺时针旋转;如果接收到 'n',电机将停止。
- 加减速:如果接收到 'j',电机将加速;如果接收到 'k',电机将减速。加减速是通过改变current_speed变量实现的,然后调用Set_Stepper_Speed(current_speed);来设置新的速度。
- 角度控制:如果接收到 'a' 到 'd' 或 'x' 到 'w' 中的任何字符,电机将旋转到指定的角度。这些字符分别代表不同的角度(例如,'a' 代表90度,'b' 代表180度,'x' 代表-90度等)。角度转换为步数,然后电机根据计算出的步数和方向旋转。
while (1)
{
OLED_show_string(1,1,"28BYJ-48: ");
// OLED_show_string(2,1,"Angle: ");
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(rflag == 1) {
rflag = 0;
// 持续旋转命令
if(rdata == 'm') {
continuous_mode = 1;
direction = 1;
HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1);
printf("START\n");
OLED_show_string(3,1,"START ");
}
// 停止命令
else if(rdata == 'n') {
continuous_mode = 0;
steps_remaining = 0;
HAL_TIM_PWM_Stop_IT(&htim2, TIM_CHANNEL_1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_12|GPIO_PIN_13, GPIO_PIN_RESET);
printf("STOP\n");
OLED_show_string(3,1,"STOP ");
}
// 加减速
else if(rdata == 'j' || rdata == 'k')
{
// 加速
if(rdata == 'j'){
current_speed += SPEED_STEP;
}
// 减速
else{
if (current_speed > SPEED_STEP) {
current_speed -= SPEED_STEP;
} else {
current_speed = 10; // 不能低于10
}
}
Set_Stepper_Speed(current_speed);
}
// 角度控制
else {
int16_t angle = 0;
switch(rdata) {
case 'a': angle = 90; break;
case 'b': angle = 180; break;
case 'c': angle = 270; break;
case 'd': angle = 360; break;
case 'x': angle = -90; break;
case 'y': angle = -180; break;
case 'z': angle = -270; break;
case 'w': angle = -360; break;
}
if(angle != 0) {
steps_remaining = abs(angle) * 4096 / 360;
direction = (angle > 0) ? 1 : -1;
HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1);
// 显示角度
uint8_t angle_str[5];
snprintf((char*)angle_str, sizeof(angle_str), "%4d", angle);
OLED_show_string(3,7, angle_str);
printf("%d\n", angle);
}
}
HAL_UART_Receive_IT(&huart1, &rdata, 1);
}
}
二、AndroidStudio 蓝牙开发
使用 Android Studio 编写一个蓝牙 app ,主要语言为 Java,实现与 stm32 的数据收发。

Bluetooth相关
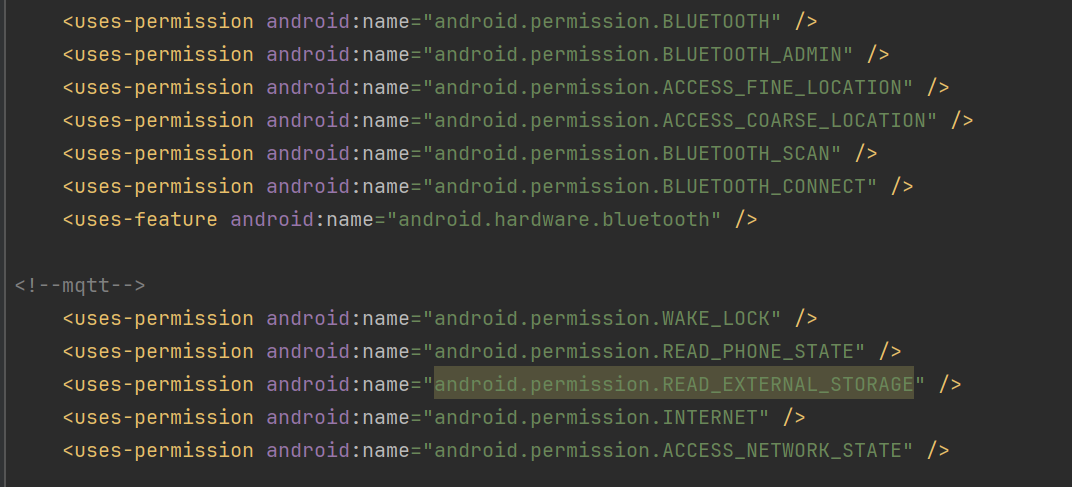
权限问题 --- AndroidManifest.xml
首先建立 Bluetooth 包,专门存放蓝牙相关的函数。
BluetoothConstants.java
- 定义 BLE 服务和特性的 UUID 常量(如服务 UUID、TX/RX 特性 UUID)。
package com.example.myapplication.Bluetooth;
import java.util.UUID;
public class BluetoothConstants {
public static final UUID SERVICE_UUID = UUID.fromString("0000ffe0-0000-1000-8000-00805f9b34fb");
public static final UUID TX_CHARACTERISTIC_UUID = UUID.fromString("0000ffe1-0000-1000-8000-00805f9b34fb");
public static final UUID RX_CHARACTERISTIC_UUID = UUID.fromString("0000ffe1-0000-1000-8000-00805f9b34fb");
}
DeviceListAdapter.java
- getView() 自定义列表项视图,显示设备名称和 MAC 地址。
package com.example.myapplication.Bluetooth;
import android.annotation.SuppressLint;
import android.bluetooth.BluetoothDevice;
import android.content.Context;
import android.view.LayoutInflater;
import android.view.View;
import android.view.ViewGroup;
import android.widget.ArrayAdapter;
import android.widget.TextView;
import androidx.annotation.NonNull;
import java.util.ArrayList;
public class DeviceListAdapter extends ArrayAdapter<BluetoothDevice> {
private final int resourceLayout;
public DeviceListAdapter(Context context, int resource, ArrayList<BluetoothDevice> devices) {
super(context, resource, devices);
this.resourceLayout = resource;
}
@SuppressLint("MissingPermission")
@NonNull
@Override
public View getView(int position, View convertView, @NonNull ViewGroup parent) {
if (convertView == null) {
convertView = LayoutInflater.from(getContext()).inflate(resourceLayout, parent, false);
}
BluetoothDevice device = getItem(position);
TextView deviceName = convertView.findViewById(android.R.id.text1);
TextView deviceAddress = convertView.findViewById(android.R.id.text2);
if (device != null) {
deviceName.setText(device.getName());
deviceAddress.setText(device.getAddress());
}
return convertView;
}
}BluetoothManager.java
- startDiscovery() 启动蓝牙设备扫描。
- registerReceivers() / unregisterReceivers() 注册/注销广播接收器,监听设备发现事件。
- requestPermissions() 请求用户启用蓝牙功能。
- notifyConnectionStatus() / notifyDataReceived() 通知监听器连接状态或数据接收事件。
package com.example.myapplication.Bluetooth;
import android.annotation.SuppressLint;
import android.bluetooth.BluetoothAdapter;
import android.bluetooth.BluetoothDevice;
import android.content.BroadcastReceiver;
import android.content.Context;
import android.content.Intent;
import android.content.IntentFilter;
public class BluetoothManager {
private final BluetoothAdapter bluetoothAdapter;
private final Context context;
private BluetoothStatusListener statusListener;
private final BroadcastReceiver discoveryReceiver = new BroadcastReceiver() {
@Override
public void onReceive(Context context, Intent intent) {
if (BluetoothDevice.ACTION_FOUND.equals(intent.getAction())) {
BluetoothDevice device = intent.getParcelableExtra(BluetoothDevice.EXTRA_DEVICE);
if (statusListener != null) {
statusListener.onDeviceDiscovered(device);
}
}
}
};
public BluetoothManager(Context context) {
this.context = context;
bluetoothAdapter = BluetoothAdapter.getDefaultAdapter();
}
public void setBluetoothStatusListener(BluetoothStatusListener listener) {
this.statusListener = listener;
}
@SuppressLint("MissingPermission")
public void startDiscovery() {
bluetoothAdapter.startDiscovery();
}
public void registerReceivers() {
IntentFilter filter = new IntentFilter(BluetoothDevice.ACTION_FOUND);
context.registerReceiver(discoveryReceiver, filter);
}
public void unregisterReceivers() {
context.unregisterReceiver(discoveryReceiver);
}
public boolean checkPermissions() {
return bluetoothAdapter != null && bluetoothAdapter.isEnabled();
}
@SuppressLint("MissingPermission")
public void requestPermissions() {
Intent enableBtIntent = new Intent(BluetoothAdapter.ACTION_REQUEST_ENABLE);
context.startActivity(enableBtIntent);
}
public void notifyConnectionStatus(String status) {
if (statusListener != null) statusListener.onConnectionStatusChanged(status);
}
public void notifyDataReceived(String data) {
if (statusListener != null) statusListener.onDataReceived(data);
}
public void notifyError(String errorMessage) {
if (statusListener != null) statusListener.onError(errorMessage);
}
public interface BluetoothStatusListener {
void onDeviceDiscovered(BluetoothDevice device);
void onConnectionStatusChanged(String status);
void onDataReceived(String data);
void onError(String errorMessage);
}
}
BLEConnection.java
- connect(BluetoothDevice device) 连接指定的 BLE 设备,并初始化 GATT 通信。
- sendData(String data) 通过 RX 特性向 BLE 设备发送数据。
- setOnDataReceivedListener() 设置监听器,用于接收从 BLE 设备返回的数据。
- setOnConnectionStateChangeListener() 设置监听器,处理连接成功或断开事件。
- close() 关闭 GATT 连接并释放资源。
- gattCallback(内部类)处理连接状态变化(如连接成功、断开)、服务发现、特性值变化(如接收数据)等回调。
package com.example.myapplication.Bluetooth;
import android.annotation.SuppressLint;
import android.bluetooth.BluetoothAdapter;
import android.bluetooth.BluetoothDevice;
import android.bluetooth.BluetoothGatt;
import android.bluetooth.BluetoothGattCallback;
import android.bluetooth.BluetoothGattCharacteristic;
import android.bluetooth.BluetoothGattService;
import android.bluetooth.BluetoothProfile;
import android.content.Context;
import android.util.Log;
public class BLEConnection {
private static final String TAG = "BLEConnection";
private final Context context;
private BluetoothGatt bluetoothGatt;
private BluetoothGattCharacteristic txCharacteristic;
private BluetoothGattCharacteristic rxCharacteristic;
private OnDataReceivedListener dataReceivedListener;
private OnConnectionStateChangeListener connectionStateChangeListener;
public BLEConnection(Context context) {
this.context = context;
}
@SuppressLint("MissingPermission")
public void connect(BluetoothDevice device) {
Log.d(TAG, "正在连接 BLE 设备: " + device.getName());
bluetoothGatt = device.connectGatt(context, false, gattCallback);
}
private final BluetoothGattCallback gattCallback = new BluetoothGattCallback() {
@SuppressLint("MissingPermission")
@Override
public void onConnectionStateChange(BluetoothGatt gatt, int status, int newState) {
if (newState == BluetoothProfile.STATE_CONNECTED) {
Log.d(TAG, "BLE 设备已连接");
bluetoothGatt.discoverServices();
if (connectionStateChangeListener != null) {
connectionStateChangeListener.onConnected();
}
} else if (newState == BluetoothProfile.STATE_DISCONNECTED) {
Log.d(TAG, "BLE 设备已断开连接");
if (connectionStateChangeListener != null) {
connectionStateChangeListener.onDisconnected();
}
close();
}
}
@SuppressLint("MissingPermission")
@Override
public void onServicesDiscovered(BluetoothGatt gatt, int status) {
if (status == BluetoothGatt.GATT_SUCCESS) {
BluetoothGattService service = bluetoothGatt.getService(BluetoothConstants.SERVICE_UUID);
if (service != null) {
txCharacteristic = service.getCharacteristic(BluetoothConstants.TX_CHARACTERISTIC_UUID);
rxCharacteristic = service.getCharacteristic(BluetoothConstants.RX_CHARACTERISTIC_UUID);
Log.d(TAG, "发现 BLE 透传服务!");
bluetoothGatt.setCharacteristicNotification(txCharacteristic, true);
}
}
}
@Override
public void onCharacteristicChanged(BluetoothGatt gatt, BluetoothGattCharacteristic characteristic) {
if (characteristic.getUuid().equals(BluetoothConstants.TX_CHARACTERISTIC_UUID)) {
String receivedData = new String(characteristic.getValue());
Log.d(TAG, "收到 BLE 数据: " + receivedData);
if (dataReceivedListener != null) {
dataReceivedListener.onDataReceived(receivedData);
}
}
}
};
@SuppressLint("MissingPermission")
public void sendData(String data) {
if (rxCharacteristic != null) {
rxCharacteristic.setValue(data.getBytes());
bluetoothGatt.writeCharacteristic(rxCharacteristic);
Log.d(TAG, "发送数据: " + data);
}
}
public void setOnDataReceivedListener(OnDataReceivedListener listener) {
this.dataReceivedListener = listener;
}
public void setOnConnectionStateChangeListener(OnConnectionStateChangeListener listener) {
this.connectionStateChangeListener = listener;
}
@SuppressLint("MissingPermission")
public void close() {
if (bluetoothGatt != null) {
bluetoothGatt.close();
bluetoothGatt = null;
}
}
public interface OnDataReceivedListener {
void onDataReceived(String data);
}
public interface OnConnectionStateChangeListener {
void onConnected();
void onDisconnected();
}
}
BluetoothConnectionActivity.java
- requestBluetoothPermissions() 动态请求 Android 12+ 的蓝牙扫描和连接权限。
- initializeUI() 初始化界面组件(列表、按钮、状态栏),并绑定点击事件。
- setupBluetoothManager() 配置蓝牙管理器,绑定设备发现、连接状态、数据接收等事件的监听器。
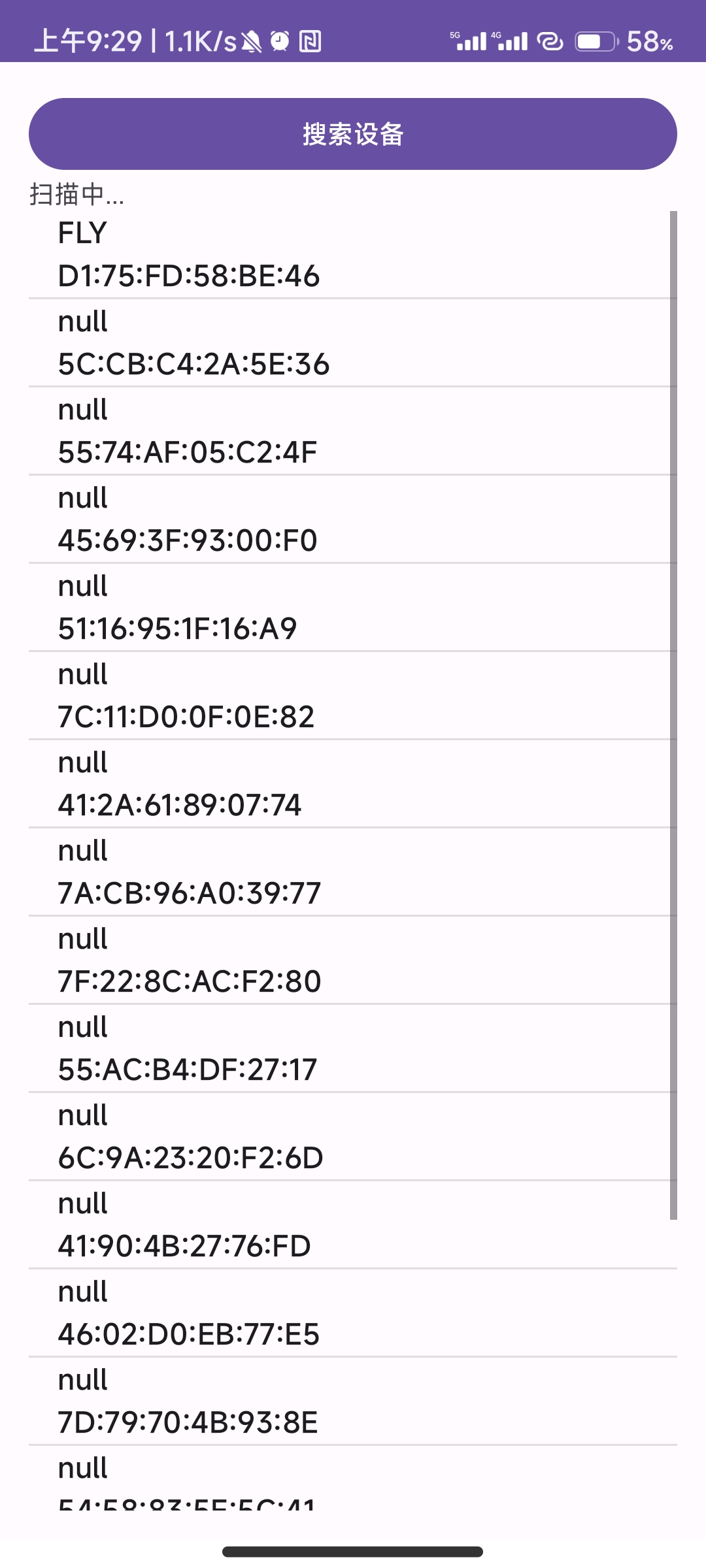
- startBluetoothDiscovery() 启动蓝牙设备扫描,更新界面状态。
- updateDeviceList(BluetoothDevice device) 将新发现的设备添加到列表并更新 UI。
- connectToDevice(BluetoothDevice device) 连接选中的设备,成功后跳转到数据传输界面。
package com.example.myapplication.Bluetooth;
import static android.content.ContentValues.TAG;
import android.Manifest;
import android.annotation.SuppressLint;
import android.bluetooth.BluetoothDevice;
import android.bluetooth.BluetoothGatt;
import android.bluetooth.BluetoothProfile;
import android.content.Intent;
import android.content.pm.PackageManager;
import android.os.Build;
import android.os.Bundle;
import android.util.Log;
import android.view.View;
import android.widget.ArrayAdapter;
import android.widget.Button;
import android.widget.ListView;
import android.widget.TextView;
import android.widget.Toast;
import androidx.appcompat.app.AppCompatActivity;
import androidx.core.app.ActivityCompat;
import androidx.core.content.ContextCompat;
import com.example.myapplication.R;
import java.util.ArrayList;
public class BluetoothConnectionActivity extends AppCompatActivity {
private ListView devicesListView;
private TextView statusText;
private Button scanButton;
private BluetoothManager bluetoothManager;
private ArrayAdapter<String> devicesAdapter;
private ArrayList<BluetoothDevice> discoveredDevices = new ArrayList<>();
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_bluetooth);
initializeUI();
setupBluetoothManager();
}
// **动态请求 Android 12+ 的蓝牙权限**
private void requestBluetoothPermissions() {
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.S) {
if (ContextCompat.checkSelfPermission(this, Manifest.permission.BLUETOOTH_CONNECT) != PackageManager.PERMISSION_GRANTED ||
ContextCompat.checkSelfPermission(this, Manifest.permission.BLUETOOTH_SCAN) != PackageManager.PERMISSION_GRANTED) {
ActivityCompat.requestPermissions(this, new String[]{
Manifest.permission.BLUETOOTH_CONNECT,
Manifest.permission.BLUETOOTH_SCAN
}, 1);
}
}
}
private void initializeUI() {
devicesListView = findViewById(R.id.devicesListView);
statusText = findViewById(R.id.statusText);
scanButton = findViewById(R.id.scanButton);
devicesAdapter = new ArrayAdapter<>(this, android.R.layout.simple_list_item_1, new ArrayList<>());
devicesListView.setAdapter(devicesAdapter);
scanButton.setOnClickListener(v -> startBluetoothDiscovery());
devicesListView.setOnItemClickListener((parent, view, position, id) -> {
BluetoothDevice selectedDevice = discoveredDevices.get(position);
connectToDevice(selectedDevice);
});
}
private void setupBluetoothManager() {
bluetoothManager = new BluetoothManager(this);
bluetoothManager.setBluetoothStatusListener(new BluetoothManager.BluetoothStatusListener() {
@Override
public void onDeviceDiscovered(BluetoothDevice device) {
runOnUiThread(() -> updateDeviceList(device));
}
@Override
public void onConnectionStatusChanged(String status) {
runOnUiThread(() -> statusText.setText(status));
}
@Override
public void onDataReceived(String data) {
runOnUiThread(() -> showToast("收到数据: " + data));
}
@Override
public void onError(String errorMessage) {
runOnUiThread(() -> showToast("错误: " + errorMessage));
}
});
}
private void startBluetoothDiscovery() {
if (bluetoothManager.checkPermissions()) {
devicesAdapter.clear();
discoveredDevices.clear();
statusText.setText("扫描中...");
bluetoothManager.startDiscovery();
} else {
bluetoothManager.requestPermissions();
}
}
private void updateDeviceList(BluetoothDevice device) {
if (!containsDevice(device)) {
discoveredDevices.add(device);
@SuppressLint("MissingPermission")
String deviceInfo = device.getName() + "\n" + device.getAddress();
devicesAdapter.add(deviceInfo);
devicesAdapter.notifyDataSetChanged();
}
}
private boolean containsDevice(BluetoothDevice newDevice) {
for (BluetoothDevice existingDevice : discoveredDevices) {
if (existingDevice.getAddress().equals(newDevice.getAddress())) {
return true;
}
}
return false;
}
@SuppressLint("MissingPermission")
private void connectToDevice(BluetoothDevice device) {
statusText.setText("连接到:" + device.getName());
BLEConnection bleConnection = new BLEConnection(this);
bleConnection.setOnConnectionStateChangeListener(new BLEConnection.OnConnectionStateChangeListener() {
@Override
public void onConnected() {
runOnUiThread(() -> {
Intent intent = new Intent(BluetoothConnectionActivity.this, BluetoothDataTransferActivity.class);
intent.putExtra("device_name", device.getName());
intent.putExtra("device_address", device.getAddress());
startActivity(intent);
});
}
@Override
public void onDisconnected() {
runOnUiThread(() -> statusText.setText("设备已断开"));
}
});
bleConnection.connect(device);
}
private void showToast(String message) {
Toast.makeText(this, message, Toast.LENGTH_SHORT).show();
}
@Override
protected void onResume() {
super.onResume();
bluetoothManager.registerReceivers();
}
@Override
protected void onPause() {
super.onPause();
bluetoothManager.unregisterReceivers();
}
}
BluetoothDataTransferActivity.java
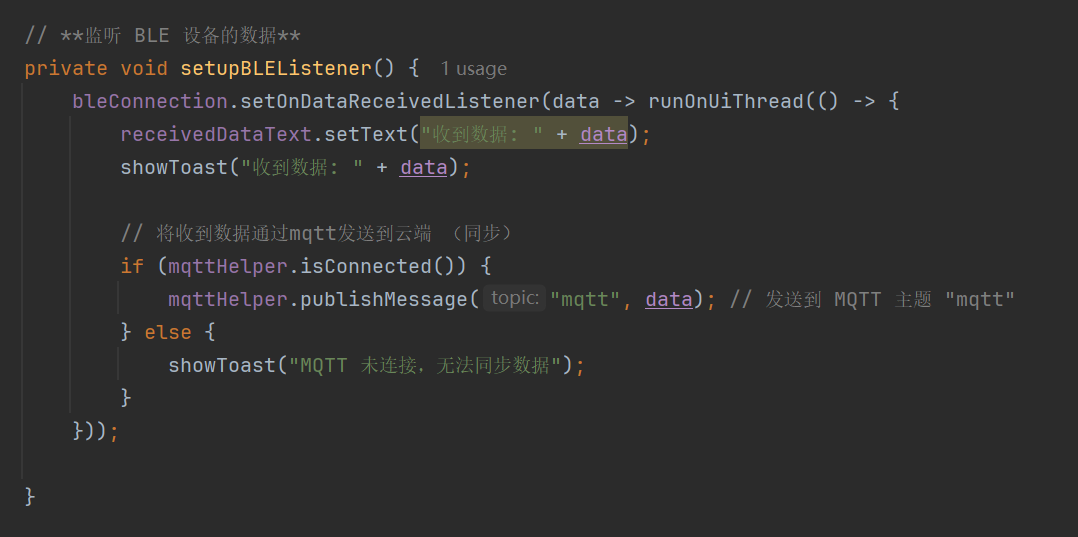
- setupBLEListener() 绑定 BLE 数据接收监听器,将收到的数据通过 MQTT 发送到云端。 发送按钮点击事件 将用户输入的数据通过 BLE 发送到设备。 (云端详情请看第四部分MQTT相关)
- onDestroy() 关闭 BLE 连接,释放资源。
package com.example.myapplication.Bluetooth;
import android.annotation.SuppressLint;
import android.bluetooth.BluetoothAdapter;
import android.bluetooth.BluetoothDevice;
import android.os.Bundle;
import android.view.View;
import android.widget.Button;
import android.widget.EditText;
import android.widget.TextView;
import android.widget.Toast;
import androidx.appcompat.app.AppCompatActivity;
import com.example.myapplication.MQTT.MqttHelper;
import com.example.myapplication.R;
public class BluetoothDataTransferActivity extends AppCompatActivity {
private BLEConnection bleConnection;
private EditText sendDataEdit;
private Button sendButton;
private TextView receivedDataText;
private TextView deviceInfoText;
private String deviceName;
private String deviceAddress;
// MQTT 连接对象
private MqttHelper mqttHelper;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_bluetooth_data_transfer);
sendDataEdit = findViewById(R.id.sendDataEdit);
sendButton = findViewById(R.id.sendButton);
receivedDataText = findViewById(R.id.receivedDataText);
deviceInfoText = findViewById(R.id.deviceInfoText);
// **获取设备信息**
deviceName = getIntent().getStringExtra("device_name");
deviceAddress = getIntent().getStringExtra("device_address");
if (deviceAddress == null || deviceAddress.isEmpty()) {
showToast("设备地址无效");
finish();
return;
}
deviceInfoText.setText("已连接到: " + deviceName + "\n" + deviceAddress);
// **创建 BLE 连接**
BluetoothDevice device = BluetoothAdapter.getDefaultAdapter().getRemoteDevice(deviceAddress);
bleConnection = new BLEConnection(this);
bleConnection.connect(device);
// **启动 MQTT 连接**
mqttHelper = new MqttHelper(this);
mqttHelper.connect();
// **设置监听器,接收数据**
setupBLEListener();
// **点击按钮发送数据**
sendButton.setOnClickListener(v -> {
String data = sendDataEdit.getText().toString();
if (!data.isEmpty()) {
bleConnection.sendData(data);
} else {
showToast("请输入要发送的数据");
}
});
}
// **监听 BLE 设备的数据**
private void setupBLEListener() {
bleConnection.setOnDataReceivedListener(data -> runOnUiThread(() -> {
receivedDataText.setText("收到数据: " + data);
showToast("收到数据: " + data);
// 将收到数据通过mqtt发送到云端 (同步)
if (mqttHelper.isConnected()) {
mqttHelper.publishMessage("mqtt", data); // 发送到 MQTT 主题 "mqtt"
} else {
showToast("MQTT 未连接,无法同步数据");
}
}));
}
@Override
protected void onDestroy() {
super.onDestroy();
if (bleConnection != null) {
bleConnection.close();
}
}
private void showToast(String message) {
Toast.makeText(this, message, Toast.LENGTH_SHORT).show();
}
}
三、MQTT连接阿里云配置
选择试用云服务器ESC

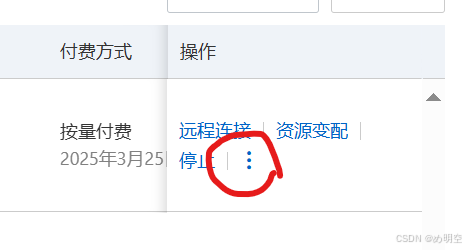

重置完成后,点击实例进入服务器详情页面,远程连接登录进入终端。

打开阿里云控制台页面,在安全组中开放 8888、1883、8083、18083、8084、443端口。

右侧管理规则,进入后手动添加开放对应端口。

1. 终端配置(主要演示终端操作)
EMQX配置,下载对应centos版本的emqx
wget https://www.emqx.com/en/downloads/broker/3.1.2/emqx-centos7-v3.1.2.zip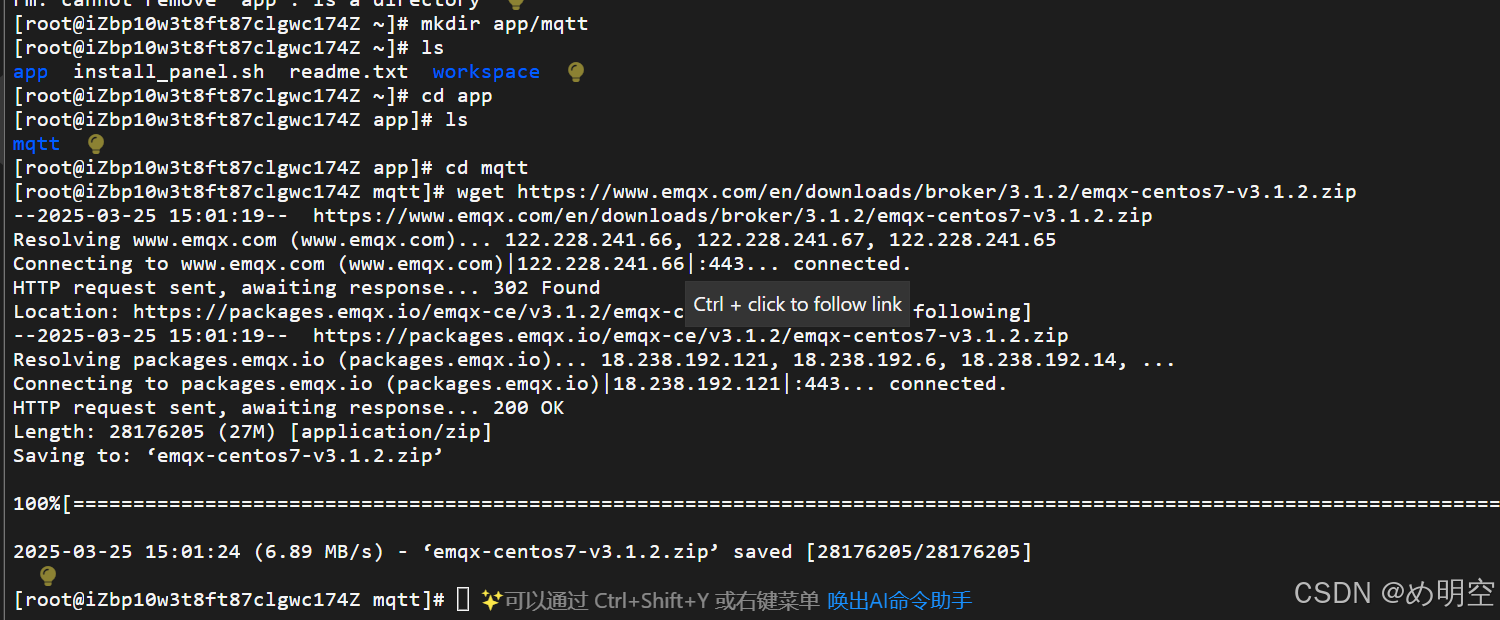
解压
unzip emqx-centos7-v3.1.2.zip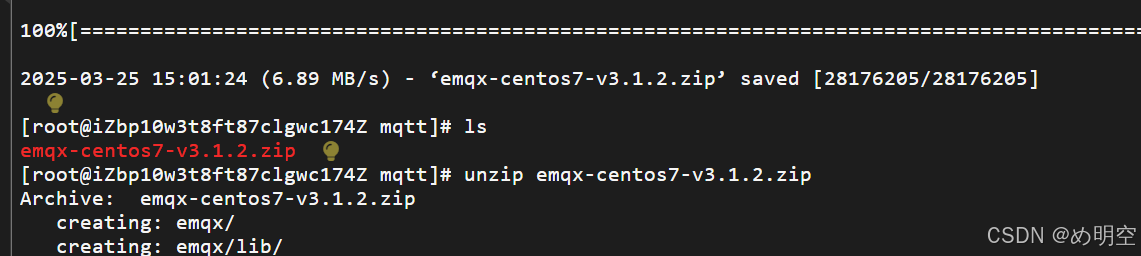
在emqx目录下启动
./bin/emqx console
./bin/emqx start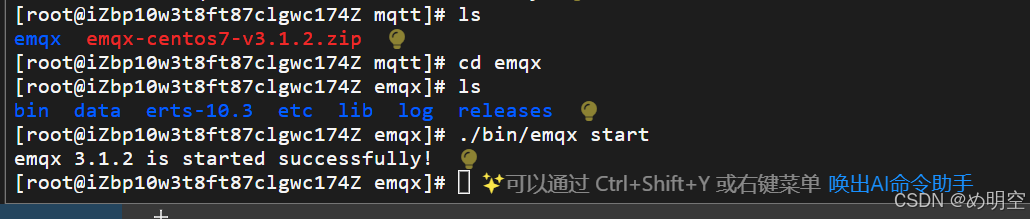
打开emqx,公网ip+18083。(你自己申请的云平台公网ip)
118.178.234.179:18083若出现连接不上和以下错误可能是版本不适配问题,重新下载emqx

还是无法连接,也可能是安全组没有配置成功,手动检查对应配置
检查本地是否开放:
若服务器本地访问
127.0.0.1:18083返回了 HTTP 200,说明 EMQX Dashboard 运行正常,问题应该出在 远程访问(本地电脑无法访问服务器的18083端口)。
curl -I http://127.0.0.1:18083
检查云端地址能否访问:
长时间没有反应说明端口开放有问题,查询防火墙开放端口。
curl -I http://118.178.234.179:18083
sudo firewall-cmd --list-ports
这里可以看出18083端口并没有被放通(博主也不知道为什么,安全组明明已经配置了)
手动配置18083号端口,配置完成后重新加载
sudo firewall-cmd --add-port=18083/tcp --permanent
sudo firewall-cmd --reload

登录,初始账号为:admin 密码:public
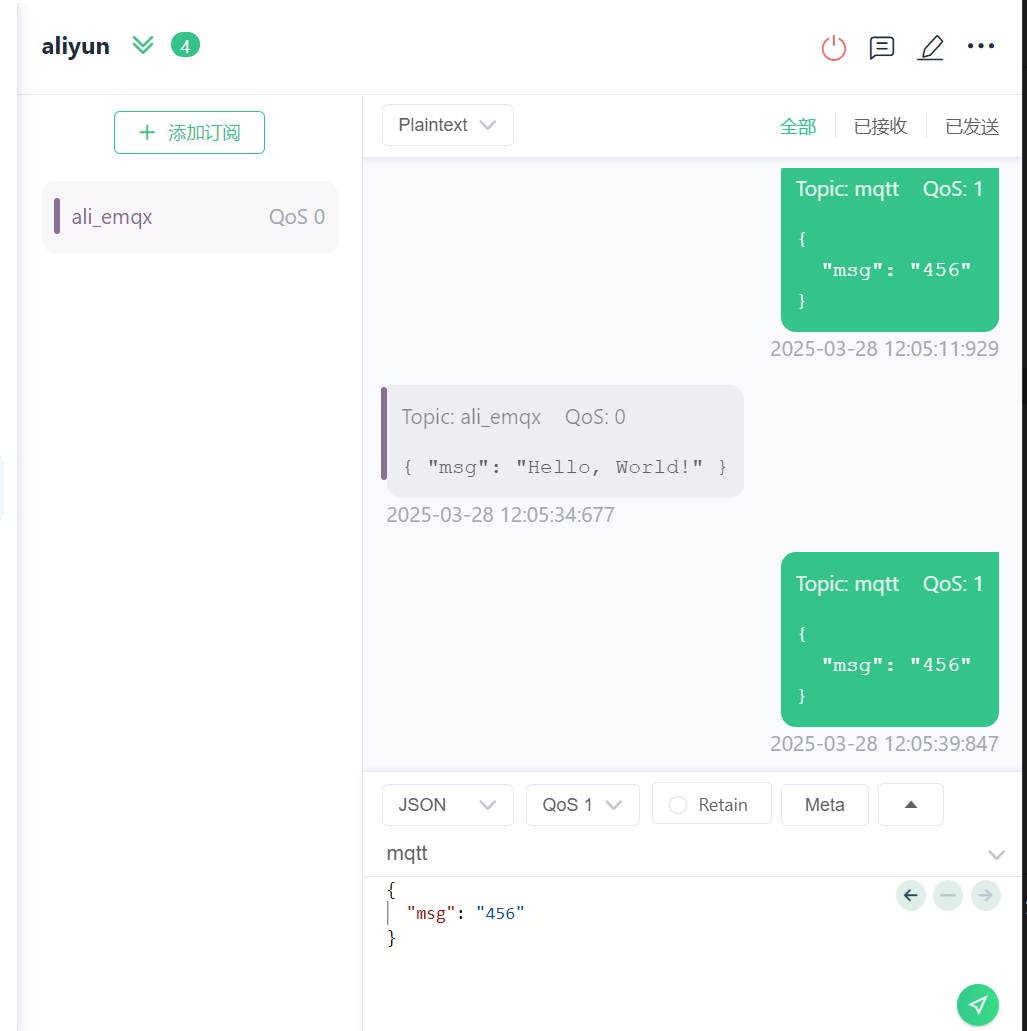
在打开的网页EMQX中进行Websocket连接

订阅主题(该主题为 mqtt 发送信息的主题名)

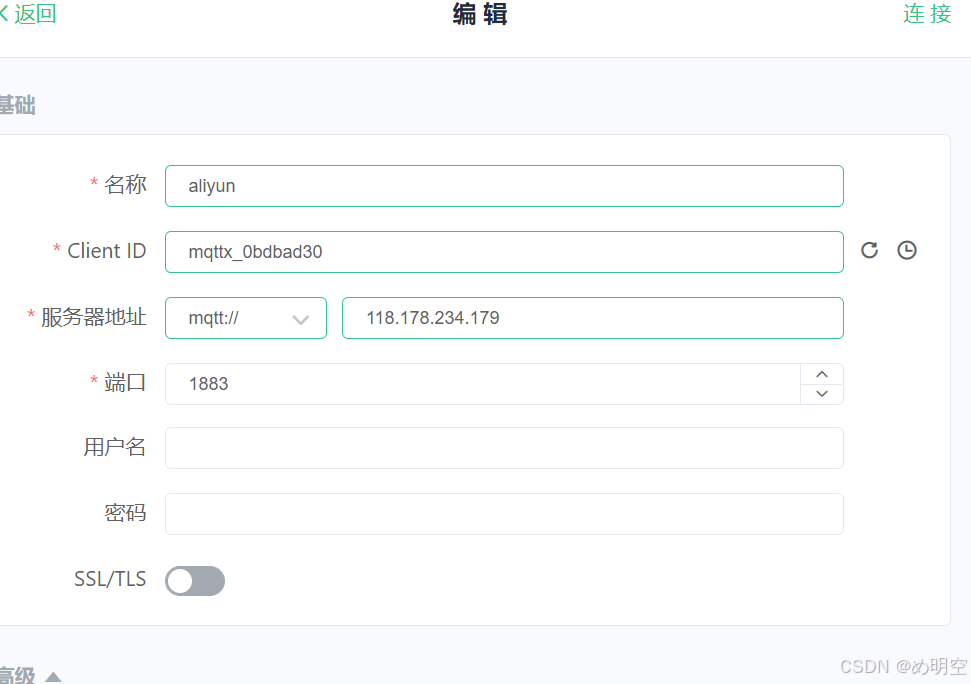
本机电脑MQTT创建连接
添加订阅主题(该主题为 emqx 发送信息的主题名)
2. 宝塔面板(较简略,请主要看终端)
安装宝塔面板(Linux-Centos)
url=https://download.bt.cn/install/install_panel.sh;if [ -f /usr/bin/curl ];then curl -sSO $url;else wget -O install_panel.sh $url;fi;bash install_panel.sh ed8484bec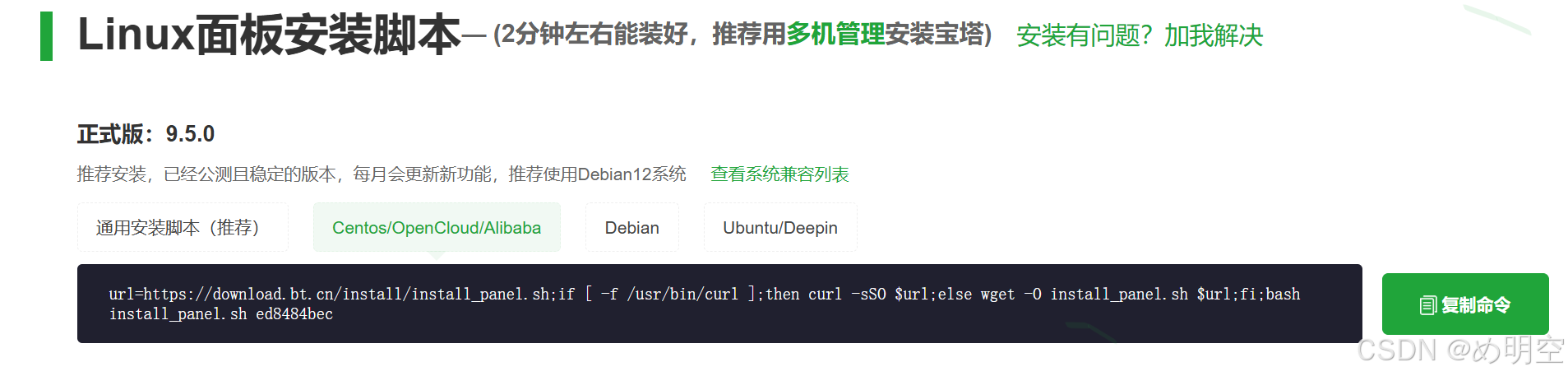
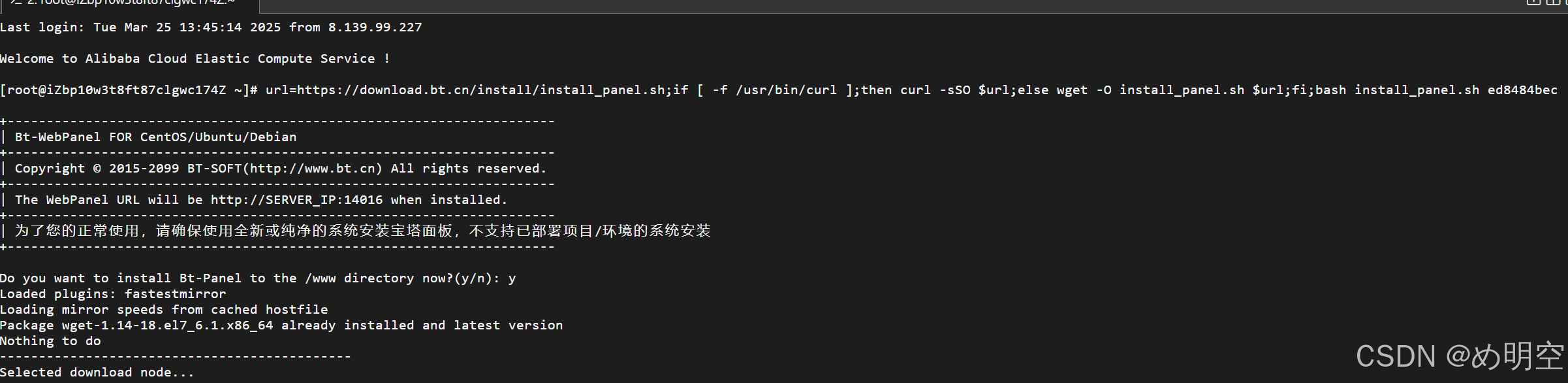
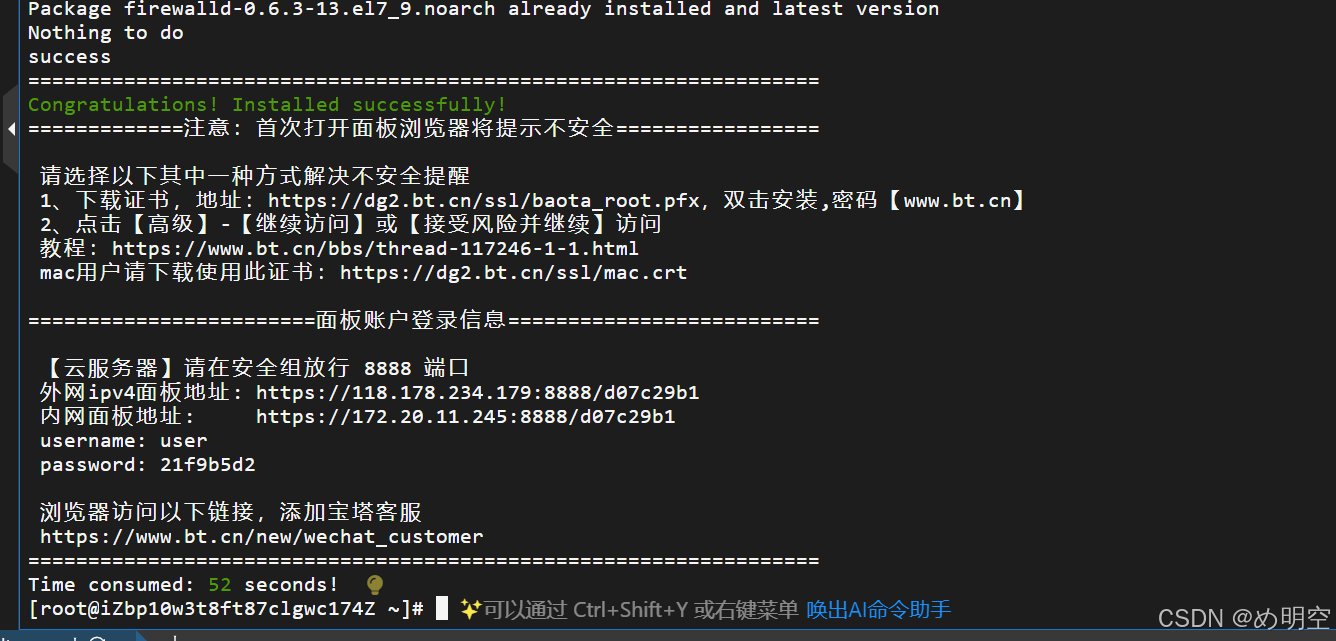
如下,版本安装完成
 打开阿里云控制台页面,在安全组中开放 8888(宝塔面板)、1883(TCP、UDP)、8083、18083、8084、443(TCP)端口。
打开阿里云控制台页面,在安全组中开放 8888(宝塔面板)、1883(TCP、UDP)、8083、18083、8084、443(TCP)端口。
右侧管理规则,进入后手动添加开放对应端口。
复制连接打开宝塔面板,(链接就是刚刚下载完成的信息)
输入账号密码登录。

 点击安全,添加刚刚对应的端口号。
点击安全,添加刚刚对应的端口号。

安装nginx
四、Android与阿里云通信
在已经完成的蓝牙app中继续添加功能,即MQTT通信功能,完成与阿里云emqx的数据通信。
MQTT相关
创建MQTT包,存放对应 mqtt 功能的函数。(只看MqttHelper即可,MqttActivity是我用于测试的函数)
MqttHelper用于实现 MQTT 协议的客户端功能,包括连接代理服务器、订阅主题、发布消息,并通过回调机制处理消息接收和连接状态。
- 构造函数 MqttHelper(Context context) 初始化 MQTT 客户端,配置连接参数(服务器地址、用户名、密码、超时等),设置回调监听(连接丢失、消息送达完成、消息接收)。
- init() 创建 MqttClient 实例,使用内存持久化(MemoryPersistence),配置连接选项(清理会话、心跳间隔等),定义回调逻辑,初始化 Handler。
- connect() 在新线程中发起异步 MQTT 连接。连接成功时通过 Handler 发送成功消息(显示 Toast 并自动订阅主题),连接失败时发送失败提示。
- isConnected() 检查客户端当前是否已连接到 MQTT 服务器。
- publishMessage(String topic, String message) 向指定主题发布消息,消息内容需为字符串。若未连接则记录错误日志。
- disconnect() 断开 MQTT 连接,释放资源。
package com.example.myapplication.MQTT;
import android.content.Context;
import android.os.Handler;
import android.os.Message;
import android.util.Log;
import android.widget.Toast;
import org.eclipse.paho.client.mqttv3.IMqttDeliveryToken;
import org.eclipse.paho.client.mqttv3.MqttCallback;
import org.eclipse.paho.client.mqttv3.MqttClient;
import org.eclipse.paho.client.mqttv3.MqttConnectOptions;
import org.eclipse.paho.client.mqttv3.MqttException;
import org.eclipse.paho.client.mqttv3.MqttMessage;
import org.eclipse.paho.client.mqttv3.persist.MemoryPersistence;
import java.util.concurrent.Executors;
import java.util.concurrent.ScheduledExecutorService;
import java.util.concurrent.TimeUnit;
public class MqttHelper {
private static final String TAG = "MQTT";
private static final String HOST = "tcp://118.178.234.179:1883";
private static final String USERNAME = "aliyun";
private static final String PASSWORD = "123456";
private static final String CLIENT_ID = "mqttx_0bdbad30";
private MqttClient client;
private MqttConnectOptions options;
private ScheduledExecutorService scheduler;
private Context context;
private Handler handler;
public MqttHelper(Context context) {
this.context = context;
init();
}
private void init() {
try {
client = new MqttClient(HOST, CLIENT_ID, new MemoryPersistence());
options = new MqttConnectOptions();
options.setCleanSession(true);
options.setUserName(USERNAME);
options.setPassword(PASSWORD.toCharArray());
options.setConnectionTimeout(10);
options.setKeepAliveInterval(20);
client.setCallback(new MqttCallback() {
@Override
public void connectionLost(Throwable cause) {
Log.e(TAG, "MQTT 连接丢失", cause);
}
@Override
public void deliveryComplete(IMqttDeliveryToken token) {
Log.d(TAG, "消息发送完成: " + token.isComplete());
}
@Override
public void messageArrived(String topic, MqttMessage message) {
Log.d(TAG, "MQTT 接收消息: " + topic + " - " + message.toString());
Message msg = new Message();
msg.what = 3;
msg.obj = topic + "---" + message.toString();
handler.sendMessage(msg);
}
});
handler = new Handler(msg -> {
if (msg.what == 30) {
Toast.makeText(context, "MQTT 连接失败", Toast.LENGTH_SHORT).show();
} else if (msg.what == 31) {
Toast.makeText(context, "MQTT 连接成功", Toast.LENGTH_SHORT).show();
try {
client.subscribe("ali_emqx", 1);
} catch (MqttException e) {
Log.e(TAG, "订阅失败", e);
}
}
return false;
});
} catch (MqttException e) {
Log.e(TAG, "MQTT 初始化失败", e);
}
}
public void connect() {
new Thread(() -> {
try {
if (!client.isConnected()) {
client.connect(options);
handler.sendEmptyMessage(31);
}
} catch (MqttException e) {
handler.sendEmptyMessage(30);
}
}).start();
}
public boolean isConnected() {
return client != null && client.isConnected();
}
public void publishMessage(String topic, String message) {
if (client == null || !client.isConnected()) {
Log.e(TAG, "MQTT 未连接,无法发送消息");
return;
}
try {
MqttMessage mqttMessage = new MqttMessage(message.getBytes());
client.publish(topic, mqttMessage);
Log.d(TAG, "消息发送到: " + topic);
} catch (MqttException e) {
Log.e(TAG, "消息发送失败", e);
}
}
public void disconnect() {
try {
if (client != null) {
client.disconnect();
}
} catch (MqttException e) {
Log.e(TAG, "MQTT 断开连接失败", e);
}
}
}
在 BluetoothDataTransferActivity.java 中添加相关 MQTT 代码。首先创建一个 MQTT 连接对象。

启动 MQTT 连接
将收到的数据利用 MQTT 传入云端,结果显示在 EMQX 上。
五、项目完整代码链接(开源)
【免费】stm32f103c8t6蓝牙通信驱动电机资源-CSDN文库
拓展--基于FreeRTOS操作系统实现电机控制功能
STM32F103C8T6-基于FreeRTOS系统实现步进电机控制-CSDN博客

![[react]Next.js之自适应布局和高清屏幕适配解决方案](https://i-blog.csdnimg.cn/direct/4494b56f3c2b419681cb1cdf6d04361d.png)