本文围绕基于无传感器控制策略的状态观测器展开,介绍其在电机领域的应用、原理、性能表现及无传感器驱动的优劣:
- 应用场景:适用于燃油泵、风扇等大量固定转速和低成本应用场景。
- 工作原理:状态观测器利用完整的电机微分模型,估算包括未知的转子速度和位置以及可测量的电机电流等全部状态变量。通过电机电流测量值与估计值的瞬时误差,调整未知变量的估计。
- 性能表现:在中高速应用中表现优异,但在反电动势较低的低速或静止运行时存在问题 。
- 无传感器驱动优势:成本更低;驱动器尺寸减小;无需速度传感器电缆,可靠性提高。
- 有传感器劣势:增加电机与控制系统连接数量;干扰增多;受温度、湿度、振动等环境因素影响,传感器精度受限,降低系统可靠性;增加系统成本,对小功率电机影响更显著;使电机设计更复杂,尤其在永磁无刷直流电机中,需在电机外壳内安装传感器设备。
1.隆博戈观测器(Luenberger state observer)数学模型及稳定性判断
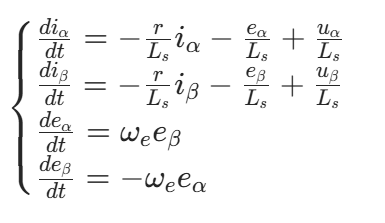
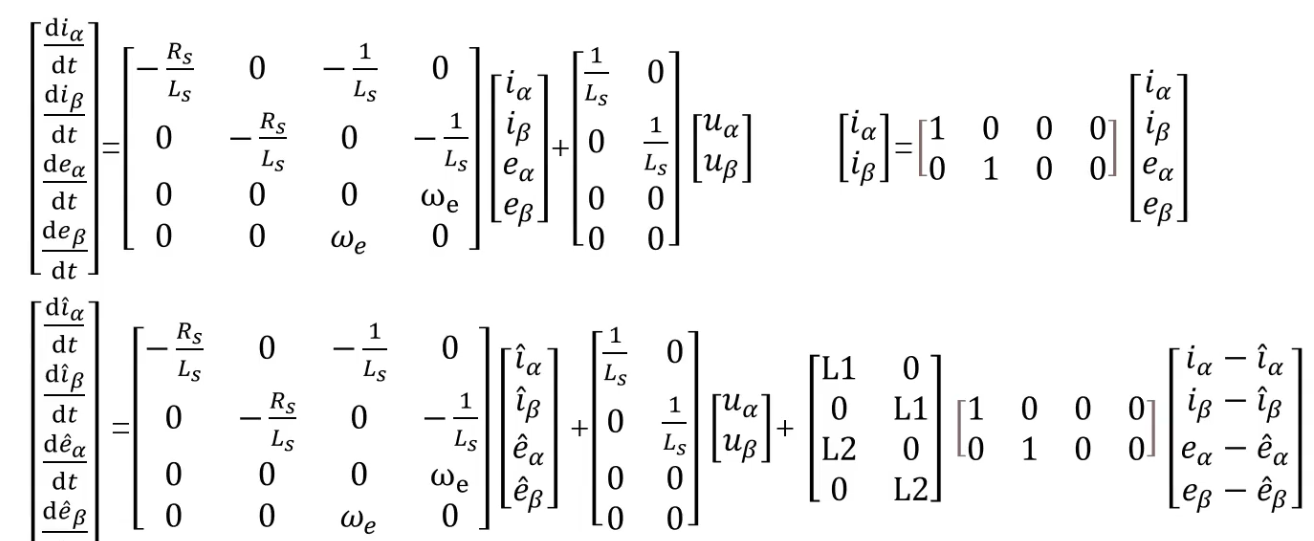
对于无感FOC电机控制而言,提取转子角度主要通过采样电流得到,电机静止坐标系下的微分方程如下所示:
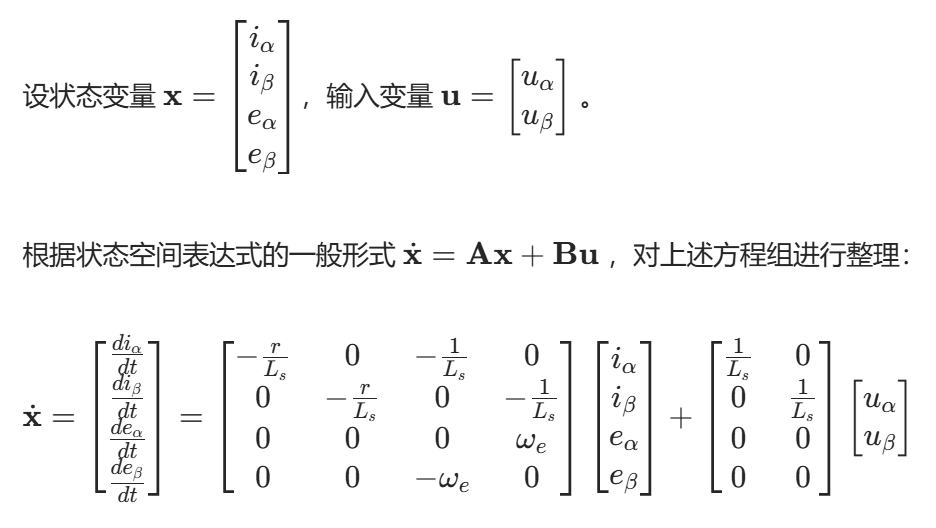
将此方程转化为状态空间表达式:

建立隆博戈观测器的结构如下图所示:
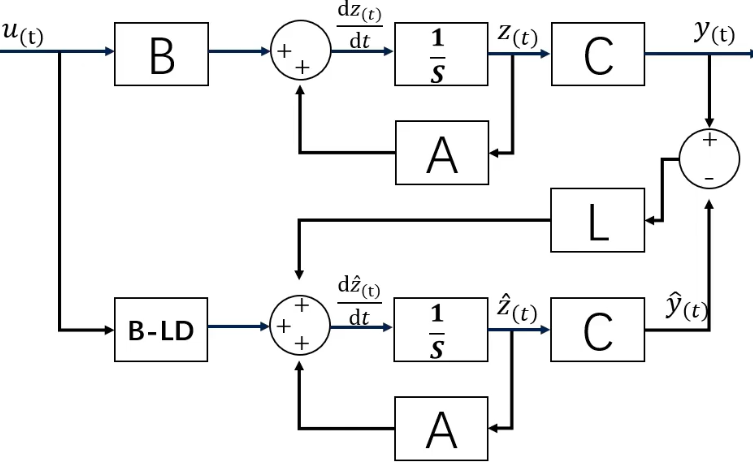
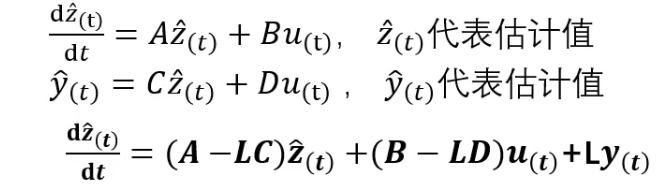
L为隆博戈观测器的反馈校正系数,从结构图中可以得出:
我们期望观测结果![]() 是接近于实际系统
是接近于实际系统![]() 的,也就是说,期望
的,也就是说,期望 最终能够收敛到0,故隆博戈观测器的稳定性判断,实际上要通过计算矩阵A的特征值来完成:
最终能够收敛到0,故隆博戈观测器的稳定性判断,实际上要通过计算矩阵A的特征值来完成:
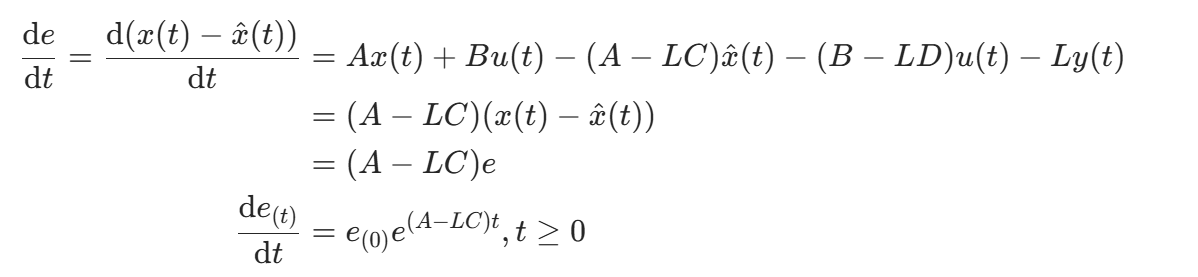
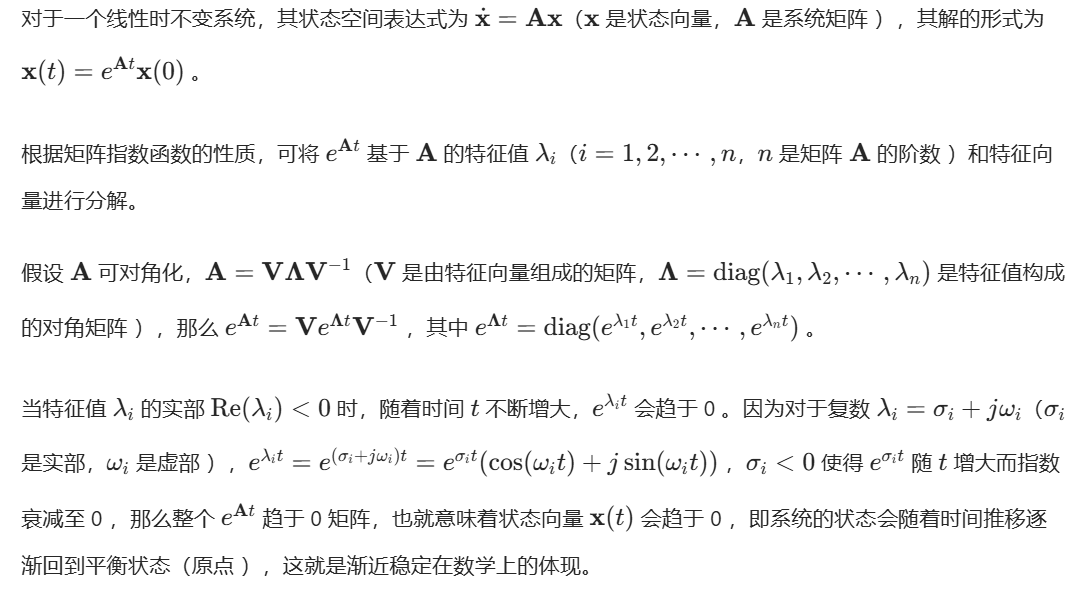
要使结果收敛,即随着 t 增大,e(t) 趋于一个有限值而不是发散(趋于无穷大 ),关键在于矩阵 A−LC 的特征值 。在状态空间分析中,对于形如 x˙=Mx(这里 M=A−LC ,x=e )的齐次线性微分方程,其解的稳定性由矩阵 M 的特征值决定。如果所有特征值的实部均为负,那么系统是渐近稳定的,即解会随着时间趋于零,也就是结果收敛 。判定依据如下:
设L矩阵如下:
则观测器设计如下:
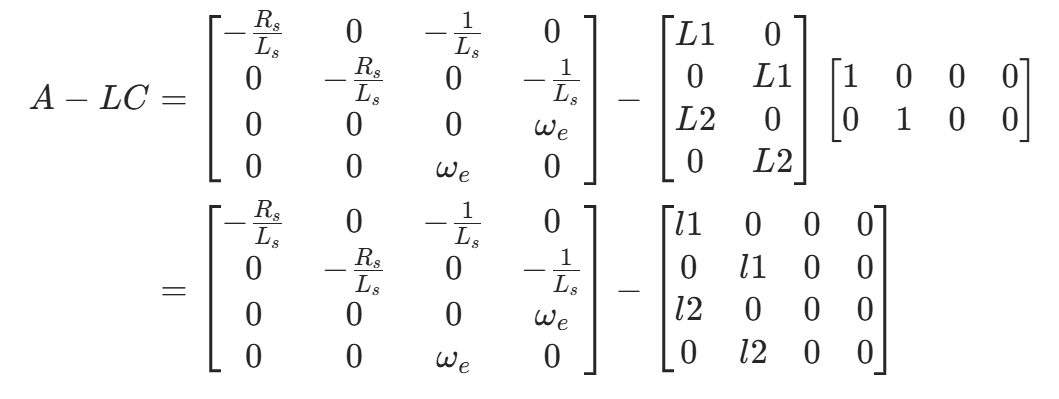
带入到上述公式中,得到误差矩阵:
求解这个矩阵的特征值如下:
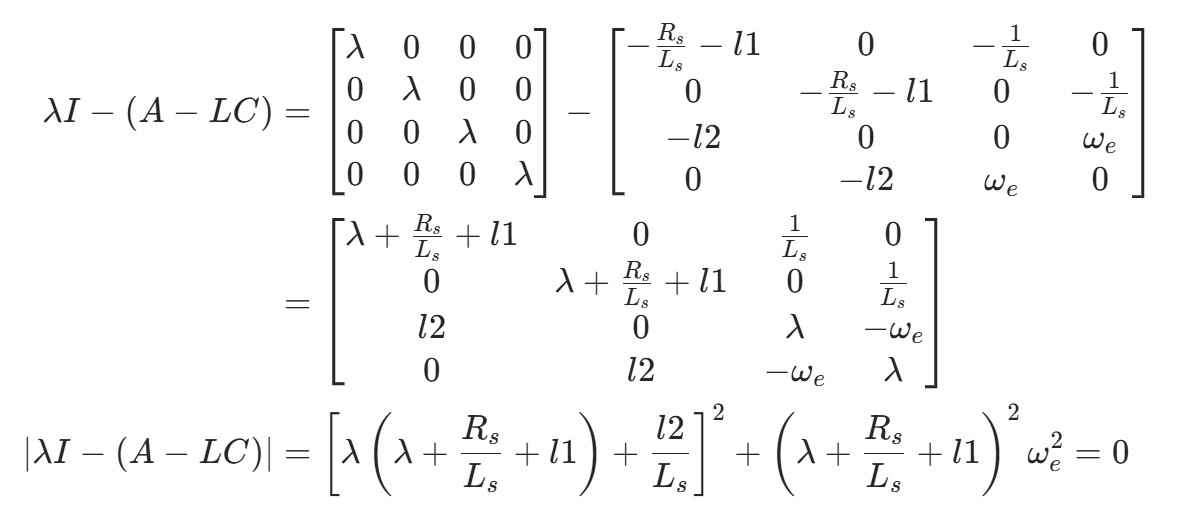
为使观测器渐近稳定,根据前面提到的稳定性理论,需所有特征值λ的实部均为负,从极点配置角度,我们希望将特征值配置在复平面左半部分。
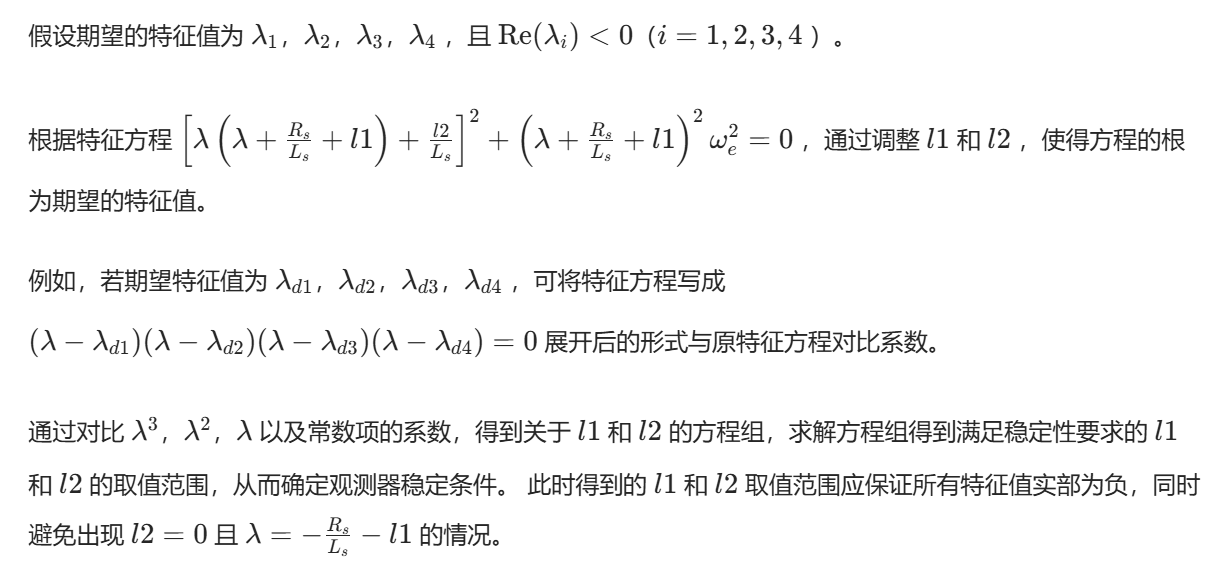
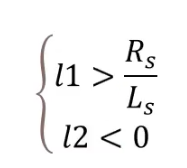
最终得到隆博戈观测器稳定的条件为:
2.锁相环设计
在观测器设计之后,需设计锁相环从而从反电动势中提取得到转子角度,锁相环的结构如下图所示:
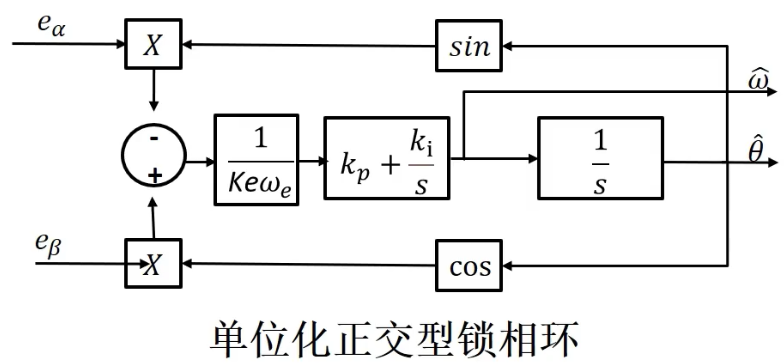
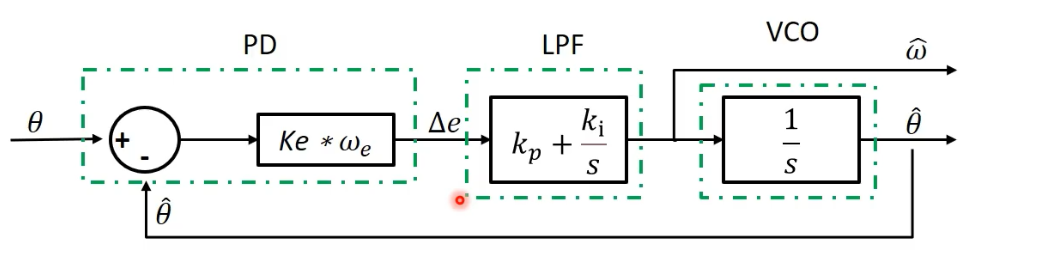
![]() 是阻尼系数,
是阻尼系数,![]() 是自然角频率,它可以被看做系统的带宽。实际上系统的带宽是描述系统在伯德图上增益衰减到−3dB 所对应的频率。自然角频率和这个频率很接近。系统带宽越大系统响应速度越快。得到正交锁相环的传递函数:
是自然角频率,它可以被看做系统的带宽。实际上系统的带宽是描述系统在伯德图上增益衰减到−3dB 所对应的频率。自然角频率和这个频率很接近。系统带宽越大系统响应速度越快。得到正交锁相环的传递函数:
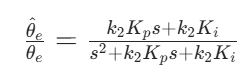
化为经典的二阶形式:
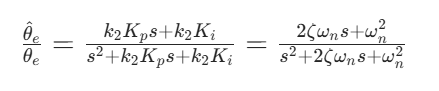
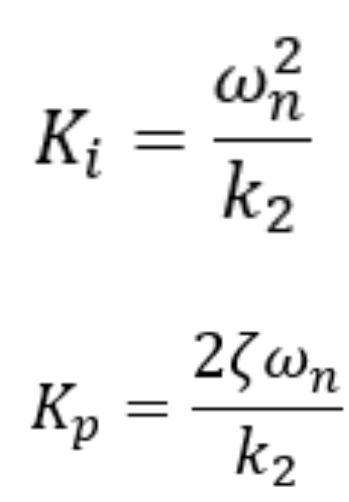
整定PID参数得到:
3.观测器离散化
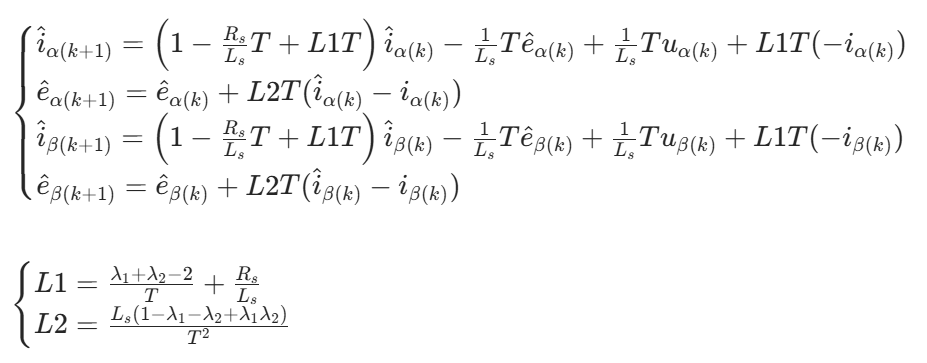
为了使本算法能够在单片机中运行,需要对上文提到的算法进行离散化,这里采用前向欧拉法进行离散化,观测器前向欧拉法离散化的过程如下图所示:

将矩阵带入得到:

全阶龙伯格观测器需要估计系统所有状态变量,计算复杂度会随系统阶数增加而大幅上升。降阶后,需估计的状态变量减少,计算量显著降低。原模型如下:
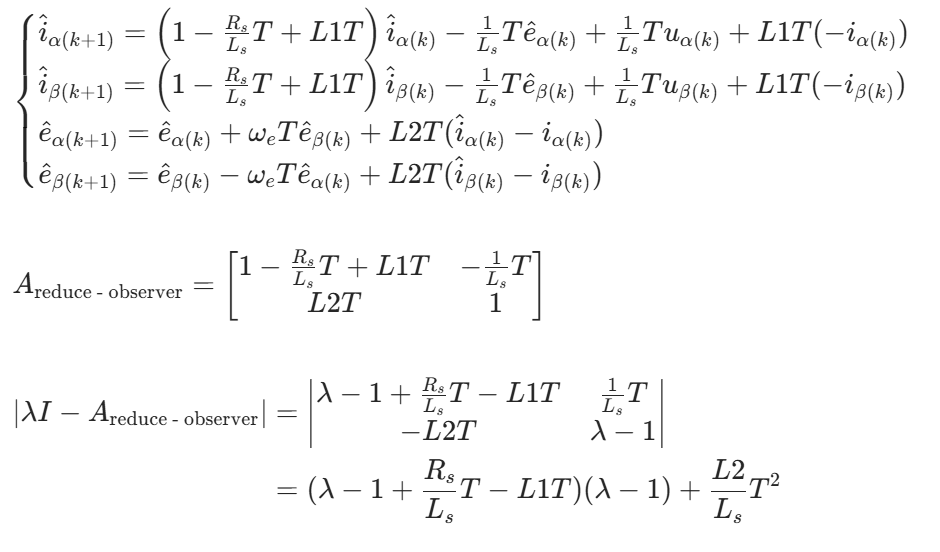
本文采用令We=0的方式解耦降阶,对观测器进行降阶处理得到: