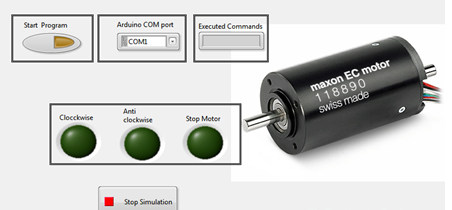
在自动化控制系统中,LabVIEW 作为图形化编程平台,因其高度可视化、易于集成硬件等优势,被广泛应用于电机控制场景。然而,要实现稳定、精确、高效的电机控制,仅有软件并不足够,还需结合硬件选型、控制逻辑设计、程序架构、实时性保障和安全防护等多方面因素进行综合考量。本文将围绕这些关键问题展开系统分析,为 LabVIEW 开发者提供实用参考。
硬件选型与连接
电机类型适配
LabVIEW 控制电机前,需根据实际应用场景明确电机类型。常见的直流电机具有结构简单、调速方便的特点,适用于对精度要求不高的基础运动控制,如小型传送带驱动;步进电机则能实现精确的角位移控制,常用于 3D 打印机的轴运动控制;伺服电机结合了高精度和高响应性,在工业机械臂、数控机床等对位置和速度控制要求极高的场景中不可或缺。不同电机所需的驱动电路和控制信号不同,例如步进机需脉冲信号控制步距角,伺服电机则依赖编码器反馈实现闭环控制,因此选型时必须匹配对应驱动模块。
数据采集卡与驱动电路连接
数据采集卡是 LabVIEW 与电机硬件通信的桥梁。以 NI 公司的 PCI-6251 数据采集卡为例,在连接直流电机驱动电路时,需将采集卡的模拟输出通道与驱动电路的控制信号端相连,确保信号电压范围匹配(如采集卡输出 0 - 5V 模拟信号,驱动电路输入也需兼容该电压区间)。对于步进电机,通常使用采集卡的数字输出端口发送脉冲和方向信号,连接时要注意共地问题,避免信号干扰导致电机运行异常。连接完成后,可通过 LabVIEW 的 “Measurement & Automation Explorer(MAX)” 工具对采集卡进行初始化和测试,确保硬件连接正常。
LabVIEW 程序设计要点
控制逻辑设计
开环控制: 在对控制精度要求不高的场景下,可采用开环控制。以直流电机调速为例,在 LabVIEW 程序框图中,通过 “模拟输出” 函数生成与电机转速对应的电压信号,将该信号输出至驱动电路。但需注意,开环控制无法补偿负载变化、电机参数漂移等因素对转速的影响,因此适用于负载稳定、对精度要求低的场合。
闭环控制: 对于高精度控制需求,如伺服电机位置控制,需构建闭环控制系统。在程序中,通过数据采集卡读取编码器反馈的位置或速度信息,与设定值进行比较,利用 PID(比例 - 积分 - 微分)控制算法计算出控制量,再输出至驱动电路。PID 参数的整定对系统性能至关重要,可采用临界比例度法、试凑法等方法进行调试,以达到稳定、快速、无超调的控制效果。
程序架构优化
模块化设计: 将电机控制程序划分为初始化、参数设置、运行控制、数据采集与处理、故障诊断等功能模块。例如,将电机的启动、停止、正反转控制封装为独立的子 VI,便于程序的调试、维护和复用。
多线程处理: 在电机控制过程中,数据采集、控制信号输出、界面显示等任务可并行执行。利用 LabVIEW 的 “生产者 - 消费者” 设计模式,将数据采集任务作为生产者,控制信号输出和界面显示作为消费者,通过队列实现数据的有序传递,避免数据冲突,提高程序运行效率。
性能优化与安全防护
实时性保障
为确保电机控制的实时性,可采用 LabVIEW Real-Time 模块。该模块支持在实时操作系统(如 PharLap ETS、NI Linux Real-Time)上运行程序,能够严格控制任务执行周期,避免因 Windows 等通用操作系统的任务调度延迟导致电机控制不精确。在使用实时模块时,需注意硬件的兼容性,如选择支持实时功能的数据采集卡,并对程序进行交叉编译和部署。
故障诊断与保护
过流、过压保护: 在电机驱动电路中设置电流、电压传感器,通过数据采集卡将监测信号输入 LabVIEW 程序。当检测到电流或电压超过设定阈值时,程序立即停止电机运行,并触发报警提示。
限位保护: 对于有行程限制的电机运动系统,安装限位开关。将限位开关信号接入数据采集卡的数字输入端口,在 LabVIEW 程序中实时监测限位状态,当电机运行至限位位置时,自动切断控制信号,防止机械碰撞损坏设备。
抗干扰措施
工业环境中存在大量电磁干扰,可能影响 LabVIEW 与电机之间的信号传输。可采取以下措施:使用屏蔽电缆连接硬件设备,减少电磁辐射对信号的干扰;对数据采集卡和驱动电路进行接地处理,降低共模干扰;在程序中加入数字滤波算法,如中值滤波、均值滤波等,对采集到的信号进行处理,提高信号的可靠性。
结语:
使用 LabVIEW 控制电机不仅仅是编写程序,更是一项系统工程。只有在电机选型、信号连接、控制策略、程序结构、实时调度、安全保护等方面做好全方位设计,才能打造出性能优良、运行稳定、具备工业级可靠性的控制系统。






![[dp8_子数组] 乘积为正数的最长子数组长度 | 等差数列划分 | 最长湍流子数组](https://i-blog.csdnimg.cn/img_convert/caf758fd96500a7a70d1597f37b4220b.png)