点云组帧
感知算法人员在完成点云的运动畸变补偿后,会发现一个问题:激光雷达发送的点云数据包中的点云数量其实非常少,完全无法用来进行后续感知和定位层面的处理工作。
此时,感知算法人员就需要对这些数据包进行点云组帧的处理。
1. 为什么需要点云组帧?
-
激光雷达是逐点输出数据的,不同于相机一次性获取完整图像,LiDAR 通过旋转扫描环境,因此点云需要累积和组织。
-
数据包需要时间同步,不同 LiDAR 可能有不同的扫描模式(逐线扫描、逐点扫描),如果不进行同步,可能会出现错帧或数据丢失。
-
运动补偿(去畸变),当 LiDAR 安装在运动平台(如无人车、机器人)上,点云数据会因为运动而产生畸变,需配合 IMU 进行修正。
-
多雷达数据融合,在多传感器 SLAM(Simultaneous Localization and Mapping)系统中,可能需要将多个雷达的点云数据合并。
2. 组帧的方法
(1) 按时间窗口组帧
适用于:机械式 LiDAR(如 Velodyne 系列)
-
以 某个时间间隔(如 100ms) 或 一圈完整扫描(360°) 作为一帧。
-
需要结合 LiDAR 旋转角度计算帧的起止点。
示例:
-
Velodyne-16 激光雷达,每秒 10 圈,每圈 100ms,数据包时间同步后按 100ms 组帧。
-
Livox LiDAR(非旋转式)可以设置时间窗口 50ms 组帧。
(2) 按角度范围组帧
适用于:旋转式 LiDAR
-
根据激光雷达的 方位角(Azimuth) 进行分割,例如每转 360° 形成一帧。
-
以 0° ~ 360° 为完整一帧,当扫描角度回到 0° 附近,则开始新一帧。
外参变化
1. 为什么需要外参变换?
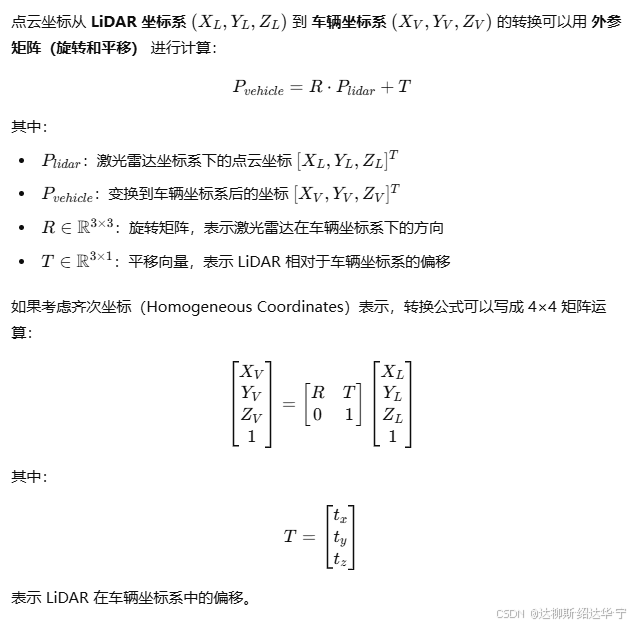
在自动驾驶系统中,激光雷达坐标系 仅适用于 LiDAR 自身的数据,而车辆坐标系 是整个车辆感知、决策、控制的基准。因此,所有传感器(LiDAR、摄像头、毫米波雷达)都需要 转换到车辆坐标系,以实现数据融合。
示例:
-
LiDAR 采集的点云 在其本地坐标系中表示(单位:米)。
-
车辆坐标系 是以车辆的质心(通常是后轴中心)为原点。
-
摄像头坐标系 也需要与车辆坐标系对齐,以进行多传感器融合。
2. 变换模型
滤波处理
点云滤波是自动驾驶和 3D 视觉任务中的关键步骤,它用于去除噪声、降低数据量、增强点云质量,以提高后续感知算法的准确性和计算效率。常见的点云滤波方法包括 体素滤波(Voxel Grid Filter)、统计滤波(Statistical Outlier Removal, SOR)、半径滤波(Radius Outlier Removal, ROR)、均值/中值滤波 等。

![[ComfyUI] 如何升级自定义节点(Custom Nodes)](https://i-blog.csdnimg.cn/direct/ea995efbae97424a9a5206ba44607d24.png)
















