提前安装好显卡驱动和cuda,如果没有安装可以参考我的这两篇文章进行安装:
ubuntu20.04配置YOLOV5(非虚拟机)_ubuntu20.04安装yolov5-CSDN博客
ubuntu20.04安装显卡驱动及问题总结_乌班图里怎么备份显卡驱动-CSDN博客
还需要提前安装ROS,如果没有安装参考下面这篇文章:
ubuntu下ROS1与ROS2共存安装(亲测有效,安装超简单)_同时安装ros1和ros2-CSDN博客
一、 zed sdk安装
进入以下链接
ZED SDK 4.2 - Download | Stereolabs

找到自己对应的版本的下载即可,我这里是CUDA12下的ZED SDK for Ubuntu 20.4.2。
在下载的文件所在目录打开终端,依次执行以下命令:
sudo apt install zstd
chmod +x ZED_SDK_Ubuntu20_cuda12.1_v4.2.5.zstd.run
./ZED_SDK_Ubuntu20_cuda12.1_v4.2.5.zstd.run
#先按q,后面的按y,出现其他默认回车。
执行命令根据上面下载的文件名称来。
安装完成后重启,输入以下命令检验:
cd /usr/local/zed/tools
./ZED_Explorer #可查看双目图像,分辨率,内参等信息
cd /usr/local/zed/tools
./ZED_Depth_Viewer #可查看深度图像,对于cuda配置有要求,可能运行失败
ZED Calibration——用于ZED校准;
ZED Sensor Viewer——ZED传感器,ZED2支持;
ZED Explorer——用于zed相机的实时预览和录制;
ZED Depth Viewer——捕获和显示深度图像和点云;
ZEDfu——ZED相机的实时3D映射和制图;
使用ZED Sensor Viewer工具可看到mini内置imu的输出信息,包括加速度、角速度(陀螺仪)及姿态。
二、ROS接口安装
官网参考链接:
Getting Started with ROS and ZED - Stereolabs
mini支持输出:
左右校正/未校正图像
深度图
彩色 3D 点云
视觉里程计:相机的位置和方向
姿态跟踪:相机的位置和方向固定并与IMU数据融合
空间映射:融合 3D 点云
传感器数据:加速度计、陀螺仪
在主目录下新建catkin_ws/src文件夹,然后打开终端,依次执行以下命令,下载编译ZED ROS安装包:
cd catkin_ws/src
git clone --recursive https://github.com/stereolabs/zed-ros-wrapper.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash若编译过程中出现以下错误:

终端执行以下命令,安装即可:
sudo apt install python3-empy若安装后,编译继续报错,我这里的原因是conda环境与ROS存在冲突:
重新编译时别忘了把之前编译生成的build和devel文件删除。
1、可以关闭虚拟环境后,再次编译通过。(建议使用第一种)
conda deactivate这种方法,下次打开终端后还是会自动进入base虚拟环境。
终端执行以下命令,即可关闭自动进入虚拟环境。
conda config --set auto_activate_base false
2、也可直接执行下列命令指定python版本编译。
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
三、ROS话题节点
在catkin下打开终端,执行以下命令:
source devel/setup.bash
roslaunch zed_wrapper zedm.launch
终端输入以下指令,查看发布的所有节点
rostopic list带位姿的imu话题:/zedm/zed_node/imu/data
不带位姿的imu话题:/zedm/zed_node/imu/data_raw
彩色校正图像(默认为左侧传感器):rgb/image_rect_color
彩色相机校准数据:rgb/camera_info
彩色未校正图像(默认为左侧传感器):rgb_raw/image_raw_color
未校正的彩色相机校准数据rgb_raw/camera_info
右相机校正图像:right/image_rect_color
右传感器校准数据:right/camera_info
右相机未校正图像:right_raw/image_raw_color
未校正的右侧传感器校准数据 :right_raw/camera_info
置信度图作为图像:confidence/confidence_image
深度图:depth/depth_registered
视差图:disparity/disparity_image
点云:zed/zed_node/point_cloud/cloud_registered
通过以下链接可以查看所有相关参数:
ROS - ZED Node - Stereolabs
如果不想每次启动都要source一下 ,可以直接写入.bashrc文件。终端执行以下命令:
gedit ~/.bashrc在打开的文件末尾添加以下代码:
source ~/catkin_ws/devel/setup.bash然后执行以下命令,刷新一下环境即可:
source ~/.bashrc四、接入相机
将相机接入,catkin_ws目录下打开两个终端。
一个终端执行以下命令:
roslaunch zed_wrapper zedm.launch另一个终端打开rviz:
rviz在rviz中添加展示的类型,并选择对应的话题,就可以查看效果了。

五、标定
安装依赖:
sudo apt-get install -y \
git wget autoconf automake nano \
libeigen3-dev libboost-all-dev libsuitesparse-dev \
doxygen libopencv-dev \
libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev在主目录下新建kalibr_ws/src文件夹,然后打开终端,依次执行以下命令,下载编译kalibr:
git clone https://github.com/ethz-asl/kalibr.git
catkin_make
我这里编译时报出以下错误:
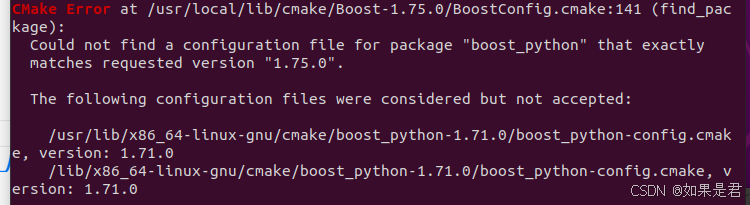
原因是boost版本和boost_python版本不一致。
执行以下命令,将boost卸载:
sudo rm -f /usr/local/lib/libboost*
sudo rm -rf /usr/local/include/boost
sudo rm -r /usr/local/lib/cmake/boost*
sudo rm -r /usr/local/lib/cmake/Boost*
通过以下链接下载boost1.71:
https://archives.boost.io/release/1.71.0/source/boost_1_71_0.tar.gz
将下载的源码解压缩至home下,在boost目录下打开终端,依次执行以下命令,等待安装完成即可:
sudo ./bootstrap.sh
sudo ./b2 installrosbag record -O kalibr_data_vga.bag /zedm/zed_node/imu/data_raw /zedm/zed_node/left/image_rect_color /zedm/zed_node/right/image_rect_color
在kalibr_ws文件夹下打开终端,重新编译即可。重新编译之前别忘了将之前编译生成的build和devel文件删除。
rosrun kalibr kalibr_calibrate_cameras --bag /home/ubuntu/kalibr_ws/zed/kalibr_data_vga.bag --topics /zedm/zed_node/left/image_rect_color /zedm/zed_node/right/image_rect_color --models pinhole-radtan pinhole-radtan --target /home/ubuntu/kalibr_ws/zed/april_6x6_80x80cm.yaml --bag-from-to 5 150 --show-extraction --approx-sync 0.04
ModuleNotFoundError: No module named ‘wx’
ModuleNotFoundError: No module named ‘igraph’
sudo apt-get install python3-wxgtk4.0
sudo apt-get install python3-igraph