文章目录
- 1. 高斯牛顿法发展历程
- 2、问题的引出
- 3、高斯牛顿法的前世
- 3.1、一阶,二阶梯度法共有原理
- 3.2、最速下降法(一阶梯度法)
- 3.3、牛顿法(二阶梯度法)
- 4、高斯牛顿法
- 4.1 高斯牛顿法的思想
- 4.2 最小二乘问题
- 4.3 高斯牛顿法原理
- 4.4 高斯牛顿法算法流程
- 4.5 高斯牛顿法缺点
- 5、曲线拟合示例
- 5.1 C++代码
- 5.2 运行结果
- 5.3 图形化显示
1. 高斯牛顿法发展历程
从上到下为高斯牛顿法的前世今生以及未来的演化:
-
最速下降法(一阶梯度法)
-
牛顿法(二阶梯度法)
-
高斯牛顿法
-
列文伯格法
-
马夸尔特法
2、问题的引出
先来考虑如下优化目标函数:

我们的目标:
对变量x 进行优化,即寻找一组合适的x使得优化目标函数F(x) 最小。
最直观的方法:

然后基于这些这些组x求出F ( x ) 的全部极值,然后通过比较极值的大小就可以找到F ( x ) 的最小值和其所对应的x 取值。
直观方法的问题:
根据上述方法,我们可以找到F ( x ) 全局最小值,但这里面有一个严重的问题。当F ( x ) 为复杂的非线性函数时,其关于x 的一阶导数是十分复杂的,导致 dF/dx = 0 难以求解,或者说求得其全部解是十分困难的,即我们难以获得F ( x ) 全局性质,自然后续的求极值比大小就无法进行,这个方法就走进了死胡同。
解决直观方法问题的思路:
对于不方便直接求解的最小二乘问题,我们可以用迭代的方式,从一个初始值触发,不断地更新当前的优化变量,使目标函数的值下降。
也就是说,虽然我们难以求解 dF/dx = 0,但我们给定一组x,求 dF/dx 的值是很容易的,就是把给定的x 代入 dF/dx 算,批量处理这一过程是计算机最擅长的事情,即我们可以很容易获得F ( x ) 局部性质。那么我们为了解决这样的一个优化问题,我们可以给定一个初值,然后利用F ( x ) 在初值附近的局部性质(即在初值附近x 如何变化可以使得F ( x ) 更小)得到初值的变化增量  ,通过迭代,当Δ x (DeltaX) 足够小时,我们就找到了F(x) 比较小的一个值和其对应的x 取值。与x相对应,这里Δ x( DeltaX)也是 n 维列向量。对应算法流程为:
,通过迭代,当Δ x (DeltaX) 足够小时,我们就找到了F(x) 比较小的一个值和其对应的x 取值。与x相对应,这里Δ x( DeltaX)也是 n 维列向量。对应算法流程为:

这让求解导函数为零的问题,变成了一个不断寻找下降增量  的问题。我们将看到,由于可以对 f 进行线性化,增量的计算将简单的多。当函数下降直到增量非常小的时候,就认为算法收敛,目标函数达到了一个极小值。在这个过程中,问题在于如何找到每次迭代点的增量,而这是一个局部的问题,我们只需要关心 f 在迭代值处的局部性质而非全局性质。这类方法在最优化、机器学习等领域广泛应用。
的问题。我们将看到,由于可以对 f 进行线性化,增量的计算将简单的多。当函数下降直到增量非常小的时候,就认为算法收敛,目标函数达到了一个极小值。在这个过程中,问题在于如何找到每次迭代点的增量,而这是一个局部的问题,我们只需要关心 f 在迭代值处的局部性质而非全局性质。这类方法在最优化、机器学习等领域广泛应用。
接下来,我们考察如何寻找这个增量  。 这部分知识实际属于数值优化的领域。
。 这部分知识实际属于数值优化的领域。
这里有几点值得注意:
-
基于局部性质找到的F ( x ) 较小值并不一定是F ( x ) 的最小值,因为我们只考察了F ( x )
在初值附近的局部情况,没有对F ( x ) 全局性质进行考察。 -
当 Δx (Deltax) 足够小时,算法结束。这个可以这样理解:此时x 只有在变化一点点的情况下才会使F(x) 变小,这说明F(x) 的函数值已经到了一个谷底附近,x 稍微变大一点都会使得F(x)从谷底向上走从而变大。之所以我们不把算法结束条件设置成Δ x = 0 (Delta x = 0) 这是因为我们恰好让F ( x ) 函数值在谷底点几乎不可能,会导致算法一直在谷底点附近小范围内震荡。
-
局部方法的核心在于如何获得增量Δ x (Delta x )

3、高斯牛顿法的前世
由于原理的相似性,最速下降法和牛顿法可以统称为一阶,二阶梯度法。这两种方法的原理分别是在局部用一次函数,二次函数对非线性函数F ( x ) 进行近似,然后利用近似函数的最小值推测非线性函数F ( x )的极小值。
3.1、一阶,二阶梯度法共有原理

3.2、最速下降法(一阶梯度法)
1)最速下降法原理
最速下降法(一阶梯度法)就是保留泰勒展开的一阶项用来近似非线性函数F ( x ),即:

2)最速下降法缺点
该方法过于贪心,容易走出锯齿线,反而增加迭代次数。
3.3、牛顿法(二阶梯度法)
1)牛顿法的原理
牛顿法(二阶梯度法)就是保留泰勒展开的一阶项和二阶项用来近似非线性函数F(x),即:

解得:

2)牛顿法的缺点
海塞矩阵  计算量太大了。
计算量太大了。
3)阻尼牛顿法
阻尼牛顿法就是在使用牛顿法获得增量方向后,进一步对最优步长进行搜索:

4、高斯牛顿法
4.1 高斯牛顿法的思想
高斯牛顿法针对最小二乘问题,采用一定的方法对牛顿法中的海塞矩阵  进行近似,从而简化了计算量。
进行近似,从而简化了计算量。
注意:只有最小二乘问题才能使用高斯牛顿法
4.2 最小二乘问题
最小二乘法(又称最小平方法)是一种数学优化技术。它通过最小化误差的平方和寻找数据的最佳函数匹配。最小二乘问题可以表述为:

4.3 高斯牛顿法原理

4.4 高斯牛顿法算法流程

4.5 高斯牛顿法缺点
-
在求解增量
 时候,我们需要计算
时候,我们需要计算  ,但是
,但是  只有半正定性质,在实际计算中可能会遇见
只有半正定性质,在实际计算中可能会遇见  为奇异矩阵或者病态矩阵,从而导致增量不稳定,算法不收敛。出现这种现象的深层原因是 F(x) 在
为奇异矩阵或者病态矩阵,从而导致增量不稳定,算法不收敛。出现这种现象的深层原因是 F(x) 在  处的近似不像一个二次函数。这也应该是牛顿法的缺点?
处的近似不像一个二次函数。这也应该是牛顿法的缺点?-
奇异矩阵:不满秩的方阵
-
病态矩阵:求解方程组时如果对数据进行较小的扰动,则得出的结果具有很大波动,这样的矩阵称为病态矩阵。
-
-
当我们求得的增量
 过大时,我们使用泰勒展开进行局部近似就会不准确。从而导致算法不收敛。
过大时,我们使用泰勒展开进行局部近似就会不准确。从而导致算法不收敛。
5、曲线拟合示例
5.1 C++代码
#include <iostream>
#include <chrono>
#include <opencv2/opencv.hpp>
#include <Eigen/Core>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int Test001LeastSquares();
int LeastSquare002();
int main(int argc, char **argv)
{
//在实际的项目中,不会有预设的真值,只有直接获取到的观测值,目的是为了依据观测值估算出真值。对于最小二乘法,是通过计算误差平方和最小来估算真值
double a_real = 1.0, b_real = 2.0, c_real = 3.0; // 真实参数值: 这里所谓真值,是为了模拟结合随机数用于构造实际观测值。
double a_esti = 2.0, b_esti = -1.0, c_esti = 5.0; // 估计参数值
std::string str_init_value = std::to_string(a_esti) + ", " + std::to_string(b_esti) + ", " + std::to_string(c_esti) + "";
int point_num = 100; // 数据点
double w_sigma = 1.0; // 噪声Sigma(西格玛)值
double inv_sigma = 1.0 / w_sigma; // 噪声Sigma(西格玛)的倒数???
cv::RNG rng; // OpenCV随机数产生器
//创建模拟实际观测点
vector<double> x_data, y_data;
{
for (int index_point = 0; index_point < point_num; index_point++)
{
double rng_value = rng.gaussian(w_sigma * w_sigma);
//模拟实际观测点
double x_temp = (double)index_point / (double)point_num; //进行 point_num(100) 等分
double y_temp = exp(a_real * x_temp * x_temp + b_real * x_temp + c_real) + rng_value;
x_data.push_back(x_temp);
y_data.push_back(y_temp);
}
}
// 开始Gauss-Newton迭代
int iterations = 100; // 迭代次数
double cost = 0, lastCost = 0; // 本次迭代的cost和上一次迭代的cost
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
for (int index_iter = 0; index_iter < iterations; index_iter++)
{
Matrix3d hessian = Matrix3d::Zero(); //海森矩阵:计算所有点的累加和 Hessian = J^T W^{-1} J in Gauss-Newton
Vector3d bias = Vector3d::Zero(); //bias: 计算所有点的累加和 bias 偏导? 斜的,偏动的
cost = 0; //误差平方和: 计算所有点的累加和
{
//针对海森矩阵(hessian)、bias、误差平方和(cost) ,计算所有点的累加和
for (int index_points = 0; index_points < point_num; index_points++)
{
double x_temp = x_data[index_points]; // 第i个数据点(实际观测点)
double y_temp = y_data[index_points]; // 第i个数据点(实际观测点)
Vector3d jacobian; //雅可比矩阵: 针对每个点,计算对应的雅可比矩阵
{
jacobian[0] = -x_temp * x_temp * exp(a_esti * x_temp * x_temp + b_esti * x_temp + c_esti); //求解雅可比矩阵: de/da 对系数a求导, 参考: P133, (6.40)
jacobian[1] = -x_temp * exp(a_esti * x_temp * x_temp + b_esti * x_temp + c_esti); //求解雅可比矩阵: de/db 对系数b求导, 参考: P133, (6.40)
jacobian[2] = -exp(a_esti * x_temp * x_temp + b_esti * x_temp + c_esti); //求解雅可比矩阵: de/dc 对系数c求导, 参考: P133, (6.40)
}
//海森矩阵:计算所有点的累加和
hessian += inv_sigma * inv_sigma * jacobian * jacobian.transpose(); //计算累加和: 高斯牛顿法的增量方程? P133, (6.41) 公式的左侧 ?
//bias: 计算所有点的累加和
double error = y_temp - exp(a_esti * x_temp * x_temp + b_esti * x_temp + c_esti); //误差值
bias += -inv_sigma * inv_sigma * error * jacobian; //计算累加和: 高斯牛顿法的增量方程? P133, (6.41) 公式的右侧 ?
//误差平方和: 计算所有点的累加和
cost += error * error; //求解最小二乘问题(误差平方和),估计曲线参数 ? P133, (6.38)
} //end for : for (int index_points = 0; index_points < point_num; index_points++)
}
if (index_iter > 0 && cost >= lastCost)
{
cout << "cost: " << cost << " > last cost: " << lastCost << ", break11." << endl;
break;
}
// 接下来,便是求解 (6.41) 公式 中的 X (delta_X_k) : 求解线性方程 Hx=b
// 求解线性方程 Hx=b P129, (公式 6.33)
Vector3d deltaX = hessian.ldlt().solve(bias);
if(std::isnan(deltaX[0]))
{
cout << "result is nan!" << endl;
break;
}
a_esti += deltaX[0];
b_esti += deltaX[1];
c_esti += deltaX[2];
lastCost = cost;
cout << "iterations[" << index_iter << "/" << iterations << "] init = " << str_init_value << ", estimated: " << a_esti << ", " << b_esti << ", " << c_esti
<< "\t deltaX(has update estimate): " << deltaX.transpose() << ", "
<< "\t total cost: " << cost << endl;
}//end for : for (int index_iter = 0; index_iter < iterations; index_iter++)
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "solve time cost = " << time_used.count() << " seconds. " << endl;
cout << "estimated abc = " << a_esti << ", " << b_esti << ", " << c_esti << endl;
return 0;
}
5.2 运行结果

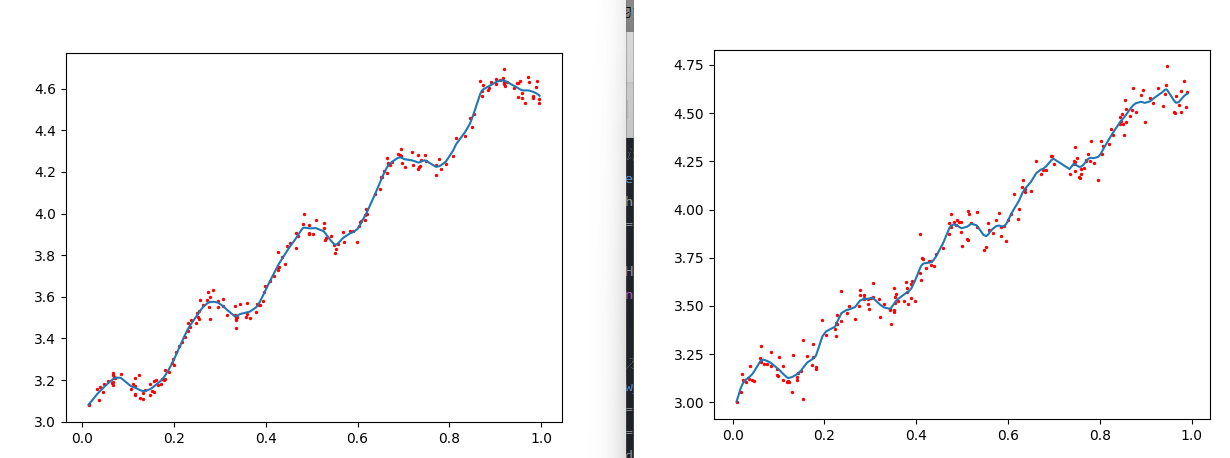
5.3 图形化显示
光滑曲线为拟合后的曲线。锯齿形的拟合前观测点。