进程
进程或线程是作为独立实体执行的任何代码片段。fork-join块创建并行运行的不同线程。在下面的图-1中,可以看到进程的类型和进程控制。
| 序号 | 进程 | 描述 |
|---|---|---|
| 1. | fork-join | 只有所有子线程执行完毕时,父线程才会执行。 |
| 2. | fork-join_any | 只有任何一个子线程执行完毕时,父线程才会执行。 |
| 3. | fork-join_none | 父线程与子线程并行执行。 |
| 4. | wait fork | 使父线程等待所有子线程执行完毕。 |
| 5. | disable fork | 当执行disable fork时,会终止所有子线程的执行。 |
| 6. | 细粒度进程控制 | 这些用于控制进程,并提供进程/线程的状态。 |
进程或线程
有3种类型的线程/进程
- fork-join
- fork-join_any
- fork-join_none
fork-join
SystemVerilog通过fork-join结构支持并行线程。在fork-join进程中,只有当所有子线程完成执行时,父线程才会执行。
语法:-
fork
线程1
线程2
线程3
join代码片段:-
$display("[%0t] Thread_T1: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d",$time,a,b,c,d);
fork:FORK_F1
begin:BEGIN_B2
#1 a <= b;
b <= 7;
$monitor("[%0t] Thread-T2: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d",$time,a,b,c,d);
#1 ->e1;
c = b;
end:BEGIN_B2
begin:BEGIN_B3
wait(e1.triggered);
$display("[%0t] 事件已触发",$time);
begin:BEGIN_B4
#1 d = c;
end:BEGIN_B4
end:BEGIN_B3
join:FORK_F1
$display("[%0t] Thread_T3: a的值为%0d,b的值为%0d,c的值为%0d,d的值为%0d",$time,a,b,c,d);
输出:
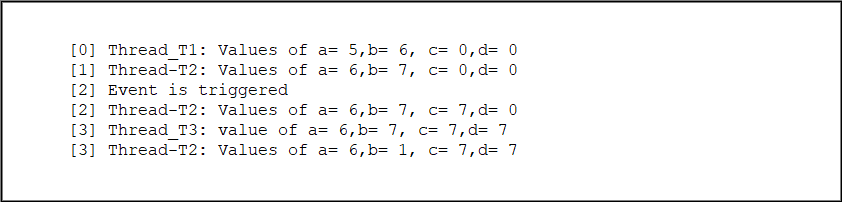
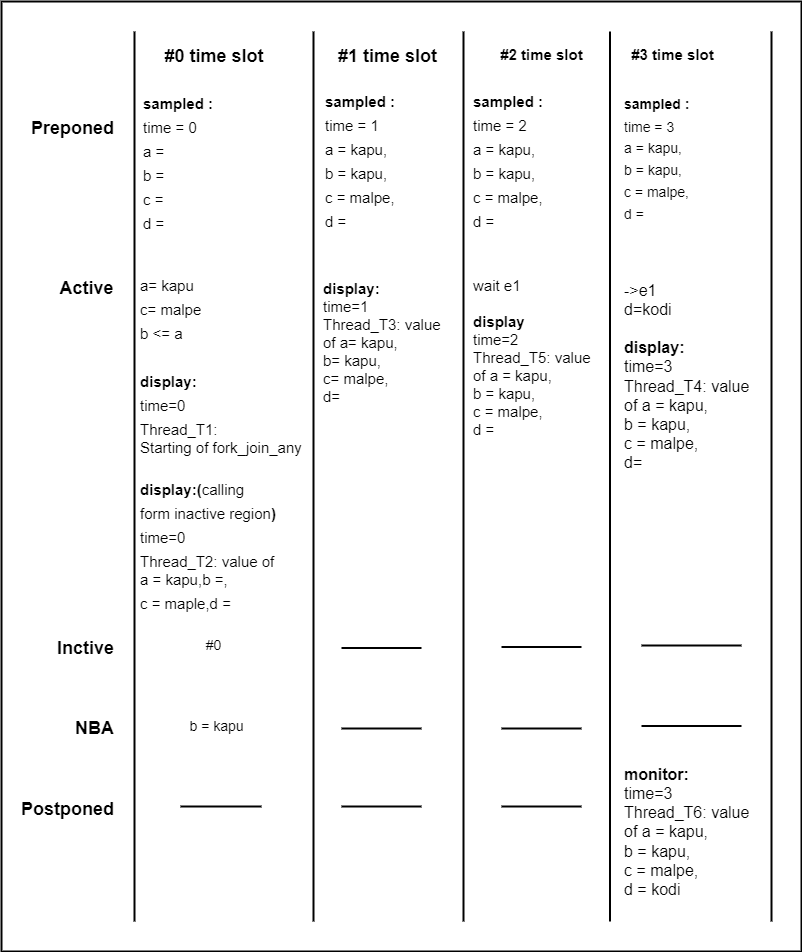
在图-2中,我们可以看到Thread_T1首先在#0模拟时间执行,但是Thread_T3将在所有子线程执行完毕后才执行,子线程将根据时间延迟执行。
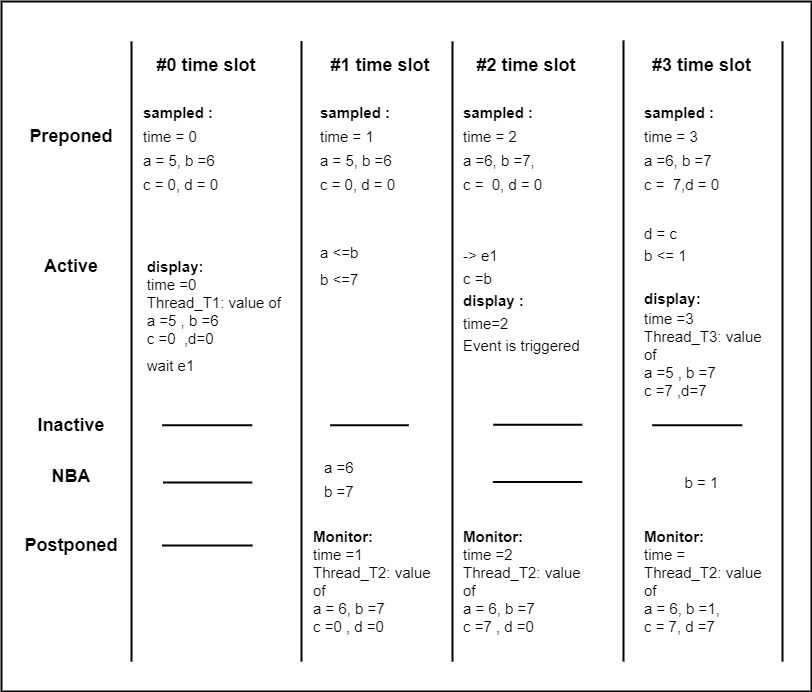
在图-3中,可以清楚地了解关于fork-join代码的整个工作方式,以及与时间表区域相关的调度原理。
- 变量的取样将在提前的区域中完成。
- 所有阻塞赋值将在活动区域执行,所有非阻塞赋值将在活动区域中评估。
- 事件将在活动区域执行。
- $display语句将在活动区域执行。
- 所有#0延迟语句将在非活动区域中执行。
- 评估的非阻塞赋值将在NBA区域中执行。
- $monitor语句将在推迟的区域中执行。
fork-join_any
当任何一个子线程完成执行时,父线程将执行。这意味着如果fork-join_any块中有2个或更多线程,并且每个线程需要不同的时间完成。在这种情况下,无论哪个线程先完成,fork-join_any都将退出该块,并开始执行模拟中的下一个父线程/语句。这并不意味着剩余的子线程将被模拟自动丢弃。这些线程将在后台运行。
语法:-
fork
Thread 1
Thread 2
Thread 3
join_any
代码片段:-
$display("[%0t] Thread_T1: Starting of fork_join_any",$time);
a = "Kapu";
c = "Malpe";
fork:FORK_F1
begin:BEGIN_B2
#0 $display("[%0t] Thread_T2: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
begin:BEGIN_B3
b <= a;
#1 $display("[%0t] Thread_T3: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
end:BEGIN_B3
end:BEGIN_B2
fork:FORK_F2
begin:BEGIN_B4
#3 -> e1;
$display("[%0t] Thread_T4: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
end:BEGIN_B4
join:FORK_F2
join_any:FORK_F1
#1 $display("[%0t] Thread_T5: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
begin:BEGIN_B5
wait(e1.triggered);
d = "Kodi";
$monitor("[%0t] Thread_T6: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
end:BEGIN_B5
输出:-
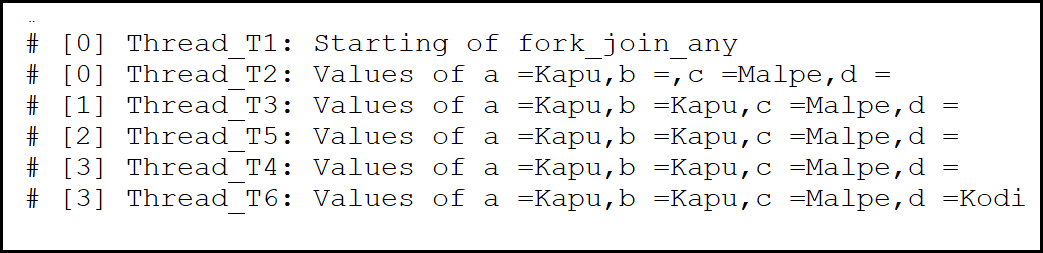
在下图中,我们可以看到父线程Thread_T1在#0处执行,子线程Thread_T3在#1处执行,然后只有父线程Thread_T5将在#2处执行。
fork-join_none
父线程与子线程并行执行。这意味着在fork-join_none外部的线程不会等待fork-join_none内部的任何线程完成,它们只是并行执行。这并不意味着模拟会自动丢弃其余的子线程。这些线程将在后台运行。
语法:-
fork
Thread 1
Thread 2
Thread 3
join_none
代码片段:-
$display("[%0t] Thread_T1: Starting of fork_join_none",$time);
a = "Kapu";
c = "Malpe";
fork:FORK_F1
begin:BEGIN_B2
#1 $display("[%0t] Thread_T2: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
b <= a;
#1 $display("[%0t] Thread_T3: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
end:BEGIN_B2
fork:FORK_F2
#1 -> e1;
$display("[%0t] Thread_T4: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
join:FORK_F2
join_none:FORK_F1
#1 $display("[%0t] Thread_T5: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
wait(e1.triggered);
d = "Kodi";
$monitor("[%0t] Thread_T6: Values of a =%0s,b =%0s,c =%0s,d =%0s",$time,a,b,c,d);
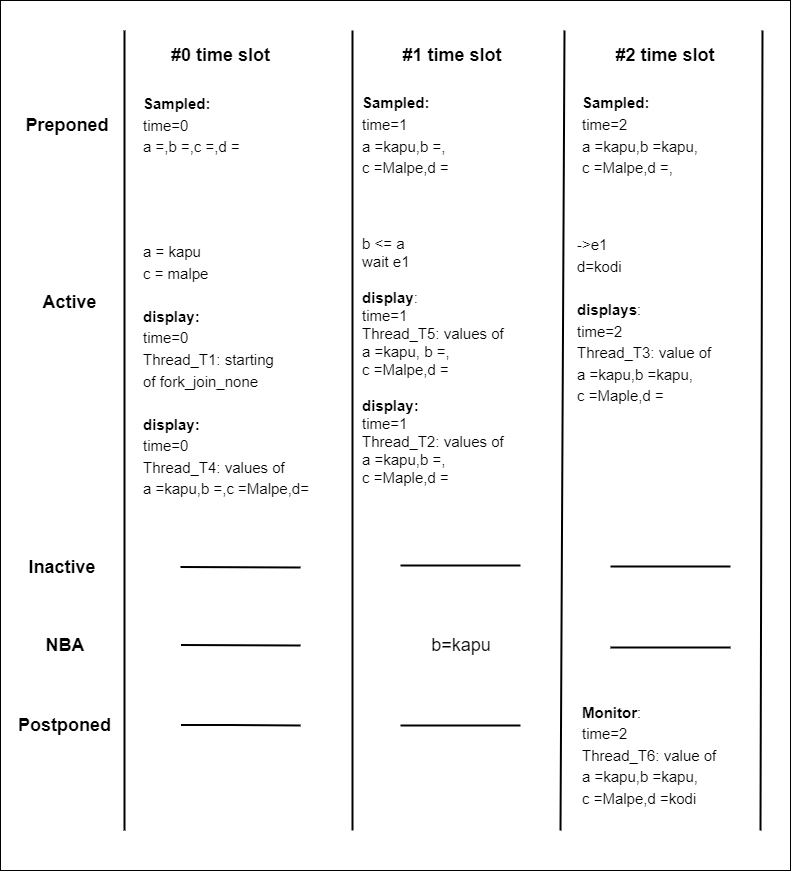
输出:在下图中,在#0处执行父线程Thread_T1和子线程Thread_T4,然后在#1处同时执行父线程Thread_T5和子线程Thread_T2,以此类推。

进程控制
System Verilog提供了允许一个进程终止或等待其他进程完成的构造。
- wait fork
- disable fork
- 细粒度进程控制
wait fork
wait fork语句用于确保所有子进程(由调用进程创建的进程)都已完成执行。它将等待直到所有fork进程完成执行。
代码片段:-
#1 $display("[%0t] Thread_T1: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
fork:FORK_F1
#2 b <= "Delta";
#0 $display("[%0t] Thread_T2: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
begin:BEGIN_B2
#1 -> e1;
c = "Hoode";
#1 $display("[%0t] Thread_T3: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
end:BEGIN_B2
fork:FORK_F2
wait(e1.triggered);
#2 $display("[%0t] Thread_T4: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
join:FORK_F2
#1 $display("[%0t] Thread_T5: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
join_none:FORK_F1
wait fork;
#0 $monitor("[%0t] Thread_T6: values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
输出:-
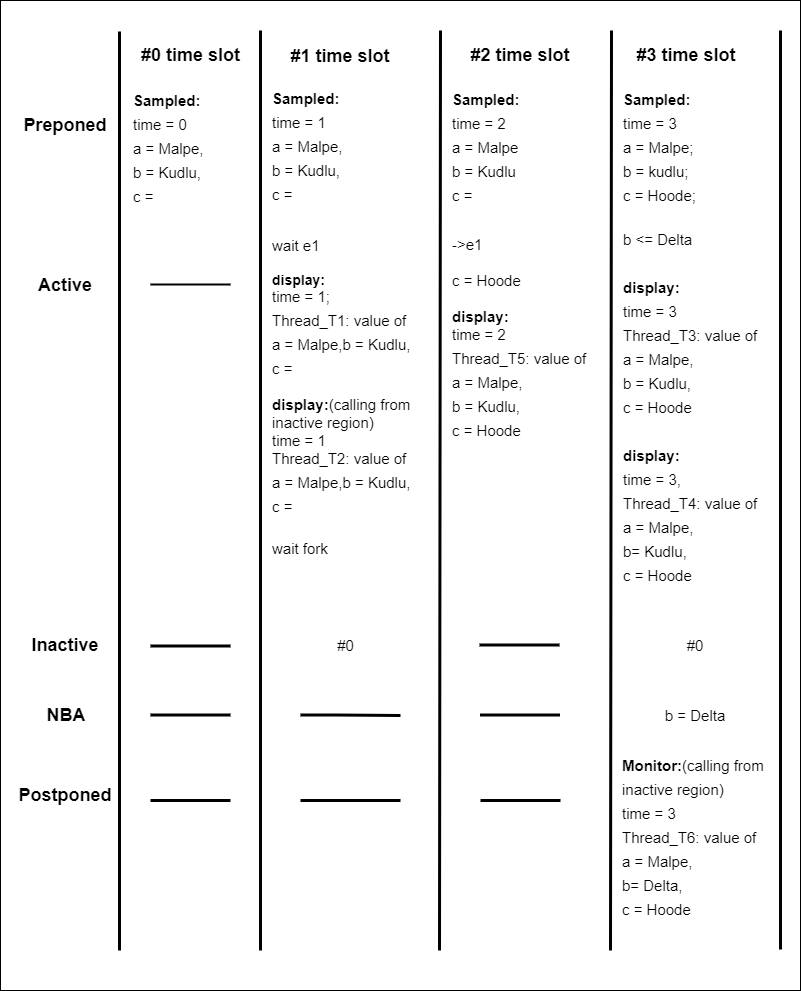
在下图中,我们看到在#1处,父线程Thread_T1将被执行,并且有一个#0语句将在非活动区域中工作,语句将在相应区域中执行。尽管我们使用了fork-join_none,但$monitor语句将等待所有子线程被执行。
disable fork
执行disable fork时,所有活动的进程都将被终止。
代码片段:-
#0 $display("[%0t] Thread_T1: Values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
fork:FORK_F1
#3 b <= "Delta";
#4 $display("[%0t] Thread_T2: Values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
begin:BEGIN_B2
#1 -> e1;
c = "Hoode";
#1 $display("[%0t] Thread_T3: Values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
end:BEGIN_B2
fork:FORK_F2
@(e1.triggered);
#1 $display("[%0t] Thread_T4: Values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
join:FORK_F2
#1 $display("[%0t] Thread_T5: Values of a = %0s,b = %0s,c = %0s",$time,a,b,c);
join_any:FORK_F1
disable fork;
#1 $display("[%0t] Thread_T6: ending of fork-join",$time);
输出:-
在下图中,在#0处,我们正在等待事件被触发,#0语句将在活动区域中执行,因为它是$display语句。 在#1处,它正在触发事件e1,并且一个子线程Thread_T5将被执行,然后由于使用了fork-join_any,它将转到父线程并触发disable fork语句,然后所有剩余的子线程将被终止。

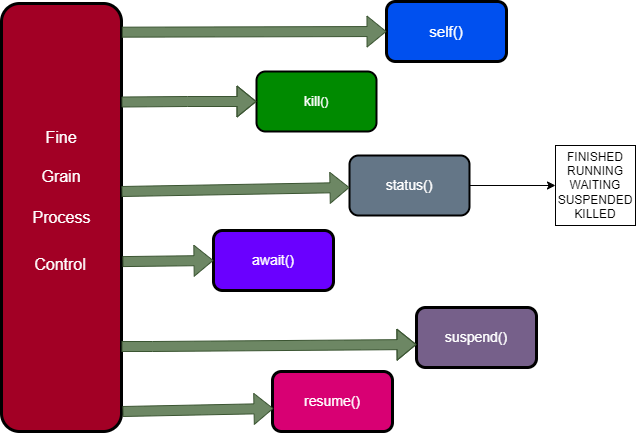
细粒度进程控制
SystemVerilog有一个内置的名为Process的类,允许一个进程(例如,像fork_join)访问和控制进程/线程。当我们分叉出任何线程时,会在那时创建Process类的新对象。该对象包含有关该线程的状态信息。
| 序号 | 任务 | 描述 |
|---|---|---|
| 1. | self() | 用于创建进程的ID/对象。 |
| 2. | status() | 用于返回当前线程的模式。 |
| 3. | kill() | 用于终止线程。 |
| 4. | await() | 用于等待当前线程完成其他线程。 |
| 5. | suspend() | 用于暂停线程一段时间。 |
| 6. | resume() | 用于从暂停状态恢复线程。 |
self()
它为Process类创建对象/ID。该对象用于访问Process类的所有预定义方法。对象包含所有线程的状态信息。
语法:-
process p_handle1,p_handle2;
initial begin
p_handle1 = process :: self();
p_handle2 = process :: self();
end
代码片段:-
fork:FORK_F1
$display("[%0t] Entered into fork-join and started first check for the process",$time);
#1 ->e1;
begin:BEGIN_B2
wait(e1.triggered);
if(p1 == null)
$display("[%0t] Not created",$time);
else
$display("[%0t] Created",$time);
->e3;
#1 ->e2;
end:BEGIN_B2
#2 p1 = process :: self();
begin:BEGIN_B3
wait(e2.triggered);
$display("[%0t] Started second check for the process",$time);
if(p1 == null)
$display("[%0t] Not created",$time);
else
$display("[%0t] Created",$time);
->e4;
end:BEGIN_B3
fork:FORK_F2
begin:BEGIN_B4
wait(e3.triggered);
$display("[%0t] first check for the process done",$time);
end:BEGIN_B4
begin:BEGIN_B5
wait(e4.triggered);
$display("[%0t] Second check for the process done",$time);
end:BEGIN_B5
join:FORK_F2
join:FORK_F1
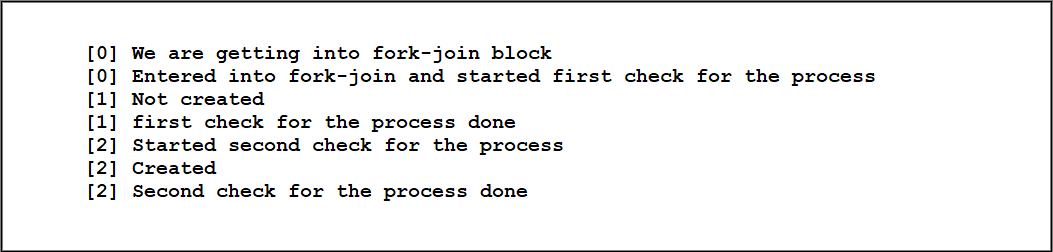
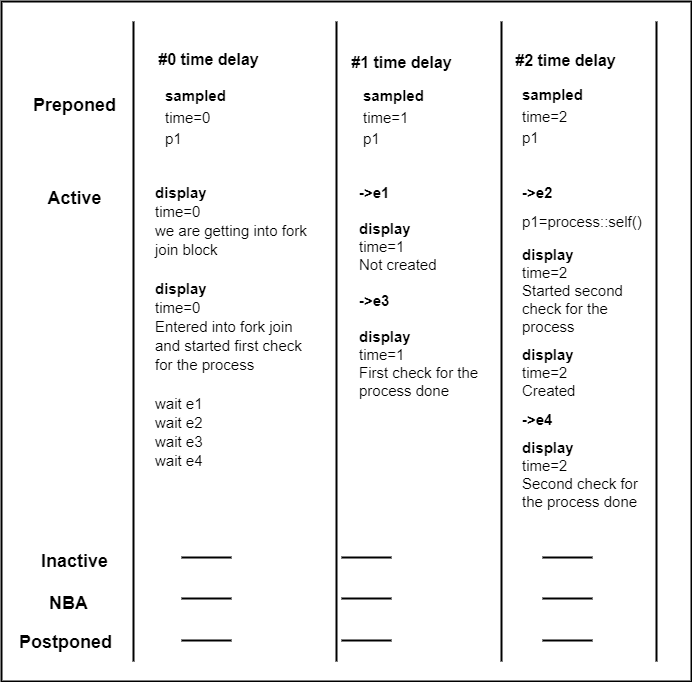
在上面的代码片段中,您可以看到在#0模拟时间时声明了进程类的句柄。在下面的图中,
- 在#1模拟时间时,我们正在检查是否创建了对象p1,然后它显示“未创建”。
- 在#2模拟时间时,我们为进程p1创建一个对象。
- 在#3模拟时间时,我们检查对象p1,显示“已创建”。
Status()
它将显示进程ID的状态/模式。有不同的模式,如已完成(Finished)、运行中(Running)、等待中(Waiting)、已挂起(Suspended)、已终止(Killed)。
语法:-
process p_handle;
initial begin
begin
p_handle = process :: self();
$display("status : %s",p_handle.status());
end
end
代码片段:-
$display("[%0t] Seeking status:",$time);
fork:FORK_F1
begin:BEGIN_B2
p1 = process :: self();
#1 $display("[%0t] I am in process p1",$time);
$display("[%0t] Initial status of p1: %s",$time,p1.status());
#1 $display("[%0t] Still working in p1",$time);
->e1;
->e2;
end:BEGIN_B2
begin:BEGIN_B3
p2 = process :: self();
wait(e2.triggered);
#1 $display("[%0t] I am in process p2",$time);
$display("[%0t] Initial status of p2: %s",$time,p2.status());
$display("[%0t] Still working in p2",$time);
->e3;
end:BEGIN_B3
begin:BEGIN_B4
wait(e1.triggered);
$display("[%0t] Final status of p1: %s",$time,p1.status());
end:BEGIN_B4
begin:BEGIN_B5
wait(e3.triggered);
$display("[%0t] Final status of p2: %s",$time,p2.status());
end:BEGIN_B5
fork:FORK_F2
p3 = process :: self();
#1 $display("[%0t] I am in process p3",$time);
#1 $display("[%0t] status of p3: %s",$time,p3.status());
#1 ->e4;
join:FORK_F2
join_any:FORK_F1
wait(e4.triggered);
#1 $display("[%0t] Final status of p3: %s",$time,p3.status());
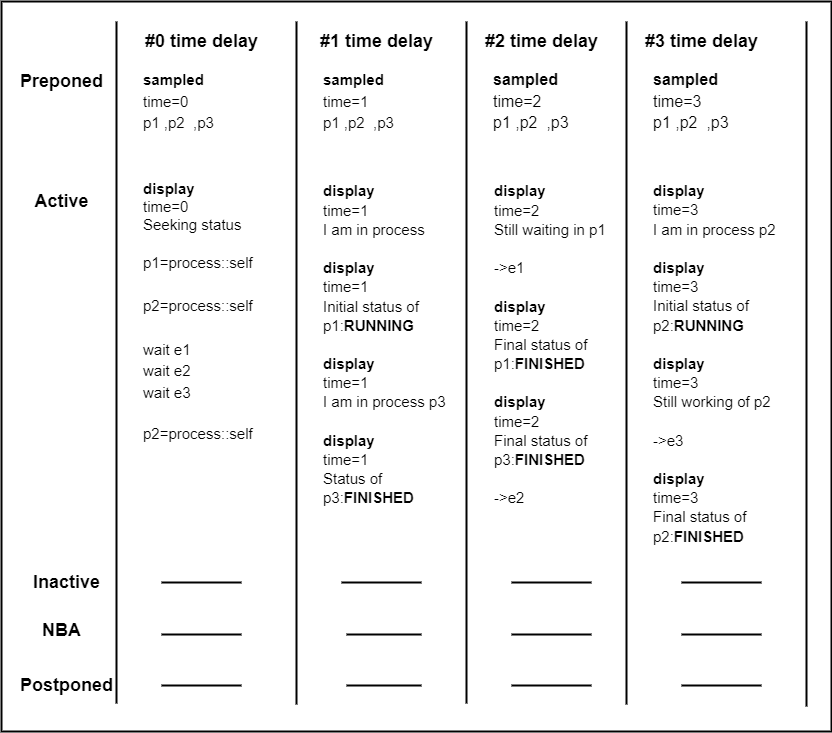
在下图中,
- 您可以看到一些字符串是大写的,这些是进程p1和p2的状态。
- 在不同的模拟时间,进程/线程的状态将根据它们的执行而改变。

kill()
kill()函数终止进程及其所有子进程。如果进程没有被阻塞(由于等待语句、延迟或等待事件触发),则它将在当前时间戳被终止。
语法:-
Process p_handle1;
initial begin
fork
p_handle1 = process :: self();
p_handle1.kill();
join_any
end
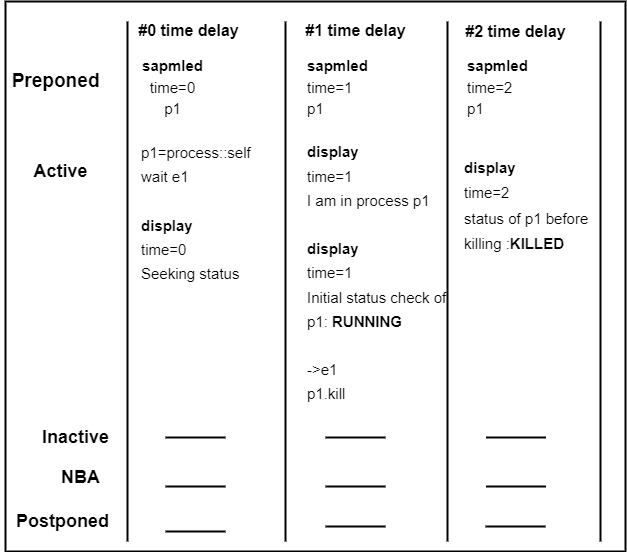
代码片段:-
$display("[%0t] Seeking status:",$time);
fork:FORK_F1
begin:BEGIN_B2
p1 = process :: self();
#1 $display("[%0t] I am in process p1",$time);
$display("[%0t] Initial status check of p1: %s",$time,p1.status);
->e1;
if(p1.status() != process :: FINISHED)
p1.kill();
$display("hi i am working");
$display("what about you?");
end:BEGIN_B2
begin:BEGIN_B3
wait(e1.triggered);
#1 $display("[%0t] Status of p1 before killing: %s",$time,p1.status());
end:BEGIN_B3
join:FORK_F1
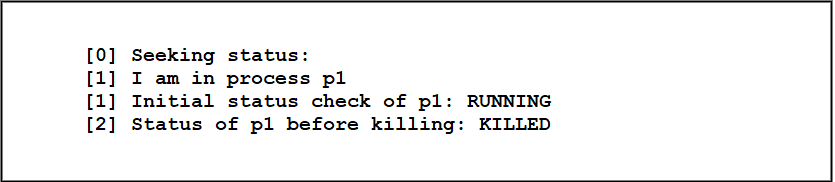
在上述代码片段中,您可以看到在#0模拟时间时创建了进程p1的进程类对象。 在下图中,
- 在#1模拟时间时,进程p1的状态为RUNNING。
- 在使用kill()方法后的#2模拟时间时,进程p1的状态为KILLED。
await()
这种方法用于允许一个进程等待另一个进程/线程完成。
语法:-
Process p_handle1,p_handle2;
initial begin
fork
begin
p_handle1 = process :: self();
p_handle2.await();
end
begin
p_handle2 = process :: self();
end
join
end
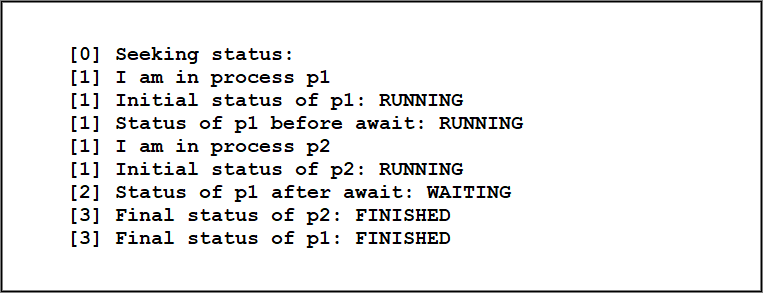
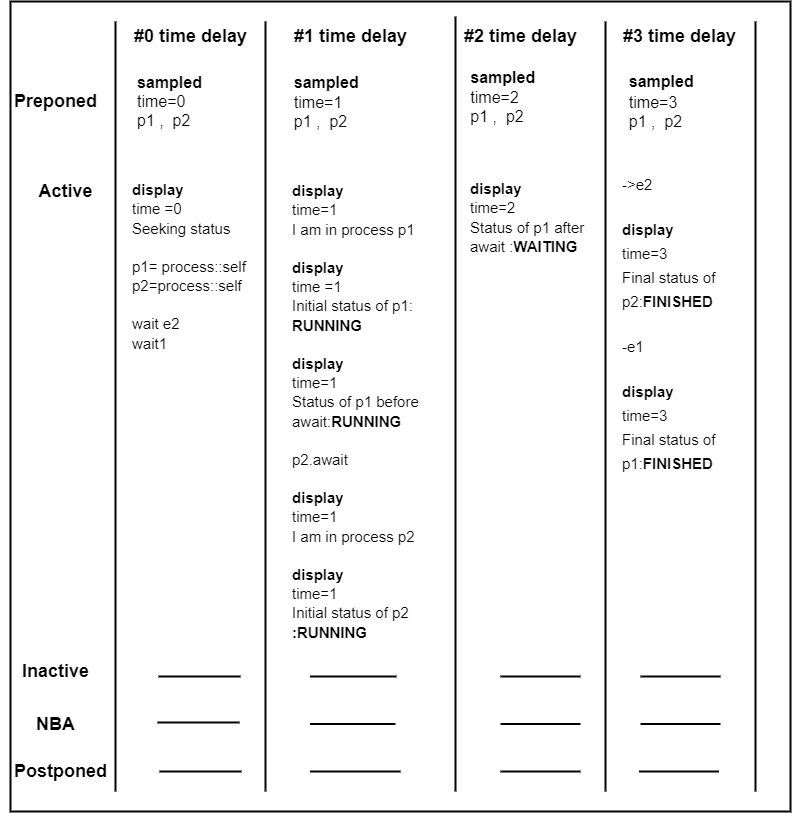
代码片段:-
在上述代码片段中,我们试图使进程p1等待直到进程p2完成。 在下面的图8中,您可以看到:
- 在#1模拟时间之前使用await()方法之前,p1的状态为RUNNING。
- 在使用await()方法后的#2模拟时间时,p1的状态为WAITING。
- 一旦p2的状态为FINISHED,则p1的状态也为FINISHED。
suspend()
这个方法用于暂停进程/线程的执行。它可以暂停自己或其他进程的执行。执行将暂停,直到遇到resume()方法。 如果进程没有被阻塞(由于等待语句、延迟或等待事件触发),则它将在当前时间戳被暂停。
语法:-
Process p_handle1;
initial begin
fork
begin
p_handle1 = process :: self();
p_handle1.suspend();
end
join_none
end
代码片段:-
在上述代码片段中,我们试图使进程p1永久暂停。 在下面的图10中,您可以看到:
- 在#1模拟时间之前,暂停p1的状态为RUNNING。
- 在#3模拟时间之后,暂停p1的状态为SUSPENDED。
resume()
这个方法用于重新启动被暂停的进程。如果暂停的进程在被阻塞时(由于等待语句、延迟或等待事件触发),则恢复该进程将重新初始化到事件表达式或等待条件为真,或等待延迟到期。
语法:-
Process p_handle1,p_handle2;
initial begin
fork
begin
p_handle1 = process :: self();
p_handle1.suspend();
end
begin
p_handle2 = process :: self();
p_handle1.resume();
end
join_none
end
代码片段:-
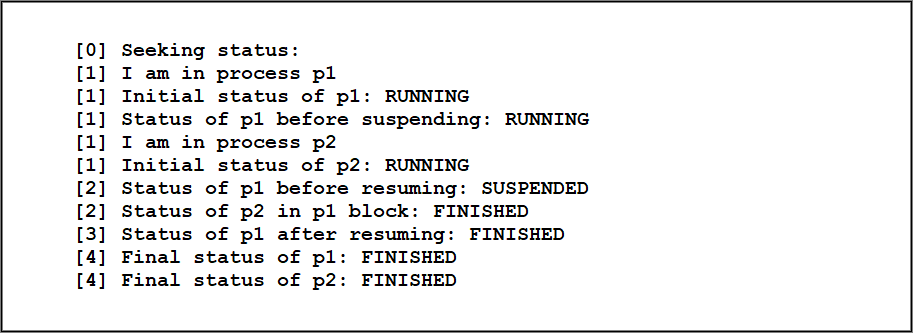
$display("[%0t] Seeking status:",$time);
fork:FORK_F1
begin:BEGIN_B2
p1 = process :: self();
#1 $display("[%0t] I am in process p1",$time);
$display("[%0t] Initial status of p1: %s",$time,p1.status());
->e1;
if(p1.status() != process :: FINISHED)
begin:BEGIN_B3
#1 $display("[%0t] Status of p1 before suspending: %s",$time,p1.status());
p1.suspend();
$display("[%0t] Status of p2 in p1 block: %s",$time,p2.status());
end:BEGIN_B3
end:BEGIN_B2
begin:BEGIN_B4
wait(e2.triggered);
$display("[%0t] Status of p1 before resuming: %s",$time,p1.status());
p1.resume();
#1 $display("[%0t] Status of p1 after resuming: %s",$time,p1.status());
->e3;
end:BEGIN_B4
begin:BEGIN_B6
p2 = process :: self();
#1 $display("[%0t] I am in process p2",$time);
$display("[%0t] Initial status of p2: %s",$time,p2.status());
if(p1.status() == process :: SUSPENDED)
#1 ->e2;
end:BEGIN_B6
begin:BEGIN_B7
wait(e3.triggered);
#1 $display("[%0t] Final status of p1: %s",$time,p1.status());
$display("[%0t] Final status of p2: %s",$time,p2.status());
end:BEGIN_B7
join:FORK_F1
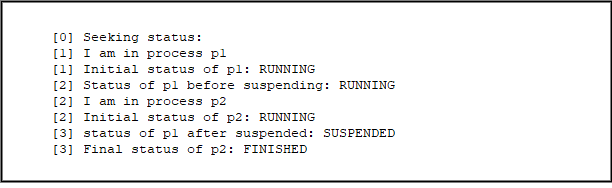
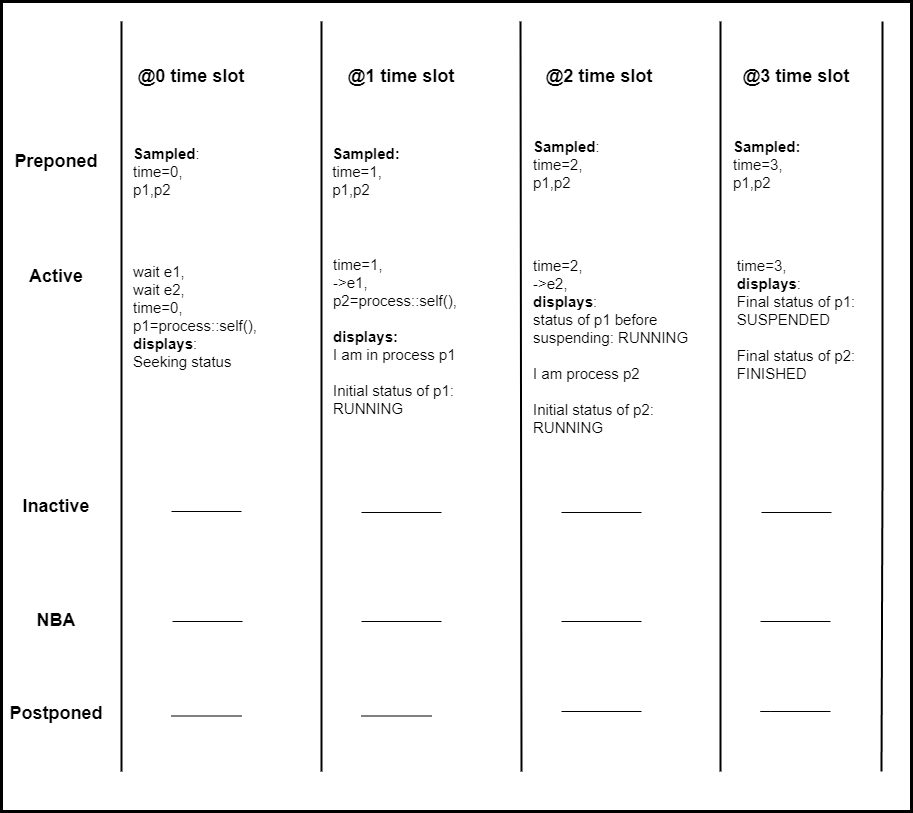
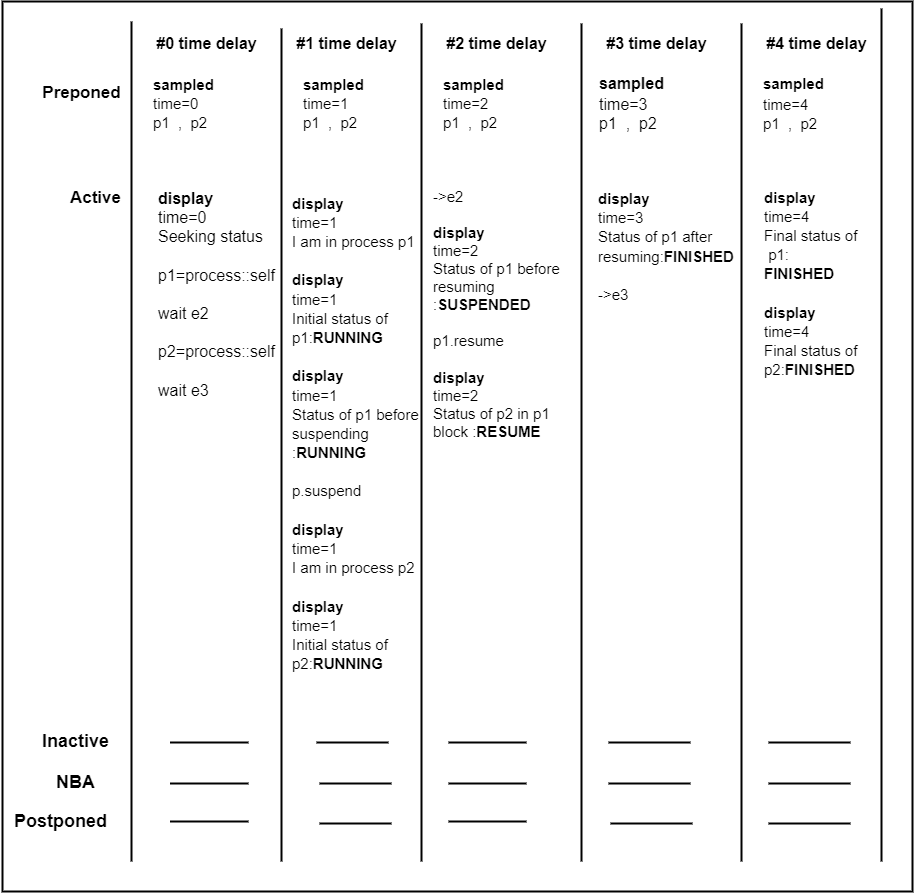
在上述代码片段中,我们试图在进程p2中恢复进程p1。 在下面的图12中,您可以看到:
- 在#1模拟时间时,p1的状态为RUNNING。
- 在使用resume()方法之前的#2模拟时间时,p1的状态为SUSPENDED。
- 在使用resume()方法后的#3模拟时间时,p1的状态为FINISHED。
进程常见问题
- fork_join、fork_join_any 和 fork_join_none 之间的区别
| fork_join | fork_join_any | fok_join_none |
|---|---|---|
| 在 fork_join 中,主(父)线程在 fork_join 中的所有线程(子线程)执行完毕后才会执行 | 在 fork_join_any 中,如果任何一个子线程执行,则主(父)线程执行 | 在 fork_join_none 中,子线程和主(父)线程同时执行 |
- 我们可以在 fork_join 中使用 wait_fork 吗?
我们知道,在 fork_join 中,仅当 fork_join 中的所有线程执行完毕时,主线程才会执行,因此不需要使用 wait_fork。 我们可以在 fork_join_any 或 fork_join_none 语句后使用 wait fork,以等待 fork-join_any 或 fork_join_none 中的所有线程完成。 因此,在 fork_join 中不需要 wait_fork。
- 阻塞和非阻塞赋值的区别
| 阻塞 | 非阻塞 |
|---|---|
| 在阻塞赋值中,一条语句执行完毕后,下一条语句将执行,即右侧表达式的第一个表达式被评估并立即分配给左侧变量 | 在非阻塞赋值中,对当前时间单位的所有右侧表达式进行评估,并在时间单位结束时分配给左侧变量 |
| 由 " = " 表示 | 由 " <= " 表示 |
| 它按顺序执行 | 它并行执行 |
| 阻塞用于组合逻辑 | 非阻塞用于时序逻辑 |
- wait event 和 @ event 之间的区别
如果我们在相同的延迟下触发 wait 和 @,那么 wait 语句会被执行,因为 wait 捕获速度比 @ 快。
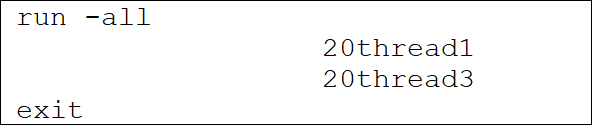
- 我们可以使用不同延迟执行 wait 和 @ 吗?
module tb;
event e;
initial begin
#20 ->e;
$display($time,"thread1");
end
initial
begin
#25 @e;
$display($time,"thread2");
end
initial
begin
#15 wait(e.triggered);
$display($time,"thread3");
end
endmodule
在上面的例子中,我们可以看到事件、wait 和 @ 的延迟是不同的。我们还可以看到这里 @ 的延迟大于事件的延迟,而 wait 的延迟小于事件的延迟,所以这里只有 wait 语句与事件的延迟一起执行。因此,在下面的图中,我们可以看到线程 1 和线程 3 使用相同的延迟(#20)执行。