S7-1200 控制器概述
S7-1200 虽然只是中小型控制器,但是功能很全面。它具有较高性能,并且具有很强的扩展能力,通信能力多种多样,本体即具有各种常见工艺功能,此外也具备西门子常见的诊断功能,下面将分几部分进行基本介绍。
- 硬件基本介绍
- 编程介绍
- 通信介绍
- 工艺功能介绍
硬件基本介绍
S7-1200 作为典型的中小型控制器,本体即具有少量 IO,并且集成以太网口,方便 OEM 厂商的使用。此外可以在 CPU 两侧安装通信模块与 IO 模块,还可以通过 Profinet IO 扩展分布式 IO,外观如图 1 所示。

图 1、S7-1200 外观
S7-1200 背板安装使用标准 DIN 导轨,模块间连接使用模块自带连接器,存储卡也非必须,所以通常无需购买附件,避免了订货时的遗漏,安装如图 2 所示。

图 2、模块安装
S7-1200 CPU 分为 1211、1212、1214、1215、1217 五种类型,每一种有不同的类型,此外还有故障安全型的 CPU,具体如图 3 所示。
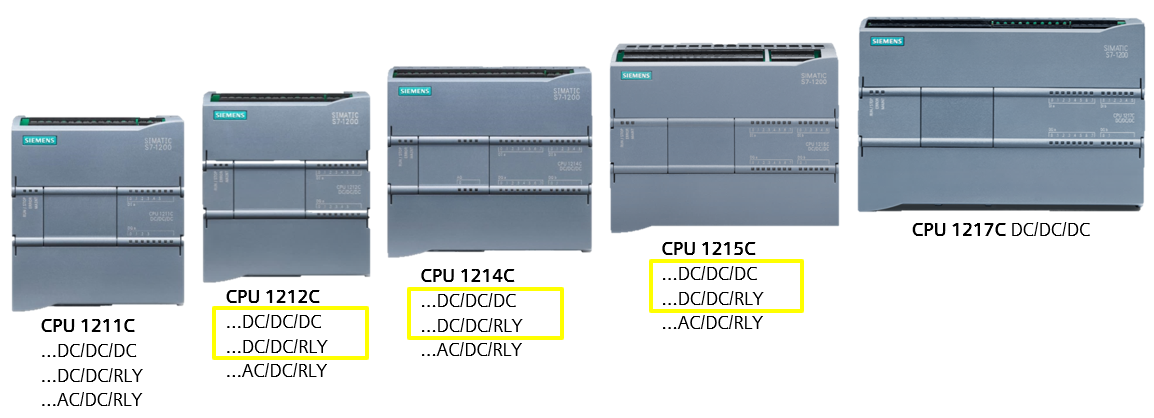
图 3、不同的 CPU
注:
1. 黄色圈出的代表还有同等类型的故障安全型 CPU。
2. DC/DC/DC 是指需要 DC 24V 电源供电,自带 DC 24V 的漏型源型输入(只能选择一种),自带 DC 24V 的晶体管源型输出。AC/DC/RLY 是指需要 AC 120V/230V 电源供电,自带 DC 24V 的漏型源型输入(只能选择一种),自带继电器输出。DC/DC/RLY 是指需要 DC 24V 电源供电,自带 DC 24V 的漏型源型输入(只能选择一种),自带继电器输出。
不同类型的 CPU 在右边可以配置的信号模块数量不同,具体如图 4 所示。此外每个类型 CPU 都还可以在 CPU 左边配置 3 个通信模块以及位于 CPU 本体正面安装的 1 块信号板。
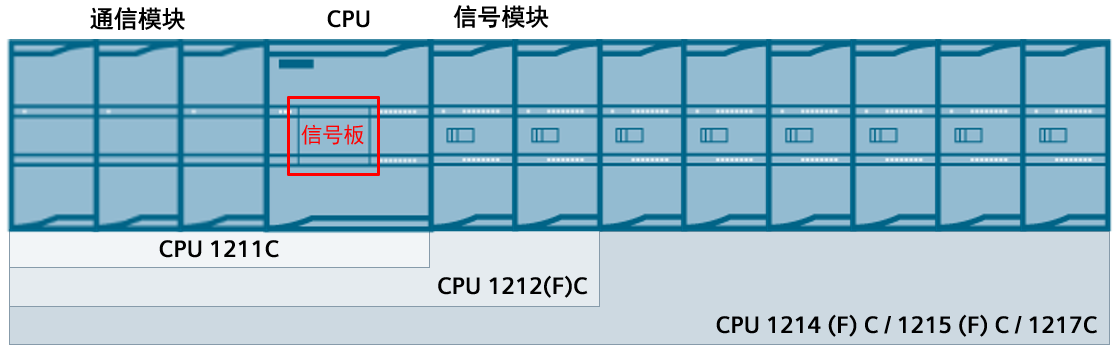
图 4、不同的 CPU 最大配置
编程介绍
S7-1200 使用 TIA Portal Step7 Basic 编程,购买以下授权即可编程。
最新 V18 版本订货号:6ES7822-0AA08-0YA5
S7-1200 编程与 S7-1500 编程方式相同,都是继承了 S7-300/400 的编程方式,使用 OB、FB、FC、DB、IO 过程映像区等进行编程,除此以外相较于 S7-300/400 在很多编程方式上更加灵活(例如常数的输入),常用的间接寻址上也更为方便简单。
S7-1200 编程支持多种语言,包括 LAD(梯形图)、FBD(功能块图)、SCL(结构化控制语言)、CEM(因果矩阵)。
其中 LAD 适合编程逻辑控制,SCL 适合编程复杂算法,是两种最常用的编程语言,通常编程都是使用不同语言混合编程。
指令集包含各种常见指令,例如位逻辑控制、定时器、计数器、转换、比较、移动、计算、字符串处理、诊断、通信、工艺指令等,此外西门子还提供常用库指令以及各式各样的工艺库供用户免费下载使用。
通信介绍
S7-1200 CPU 本体即包含 1-2 个以太网口,并且支持 Profinet IO、S7、开放式用户通信、OPC UA 等西门子常用协议,使用更加便捷,并且还可以通过扩展最多 3 个通信模块以及 1 个串口信号板实现更多通信功能,如图 5 所示。

图 5、配置通信模块的 CPU
如图 6 所示,通过本体网口,可以进行 CPU 之间的通信,以及与 TIA Portal、HMI、第三方软硬件的通信,同时还可以进行 Profinet IO 通信,用以连接 ET200、变频器、驱动器、阀岛等,这些通信都可以在一个网络中实现。通过连接 ET200,还可以增加可用的 IO,方便扩展。
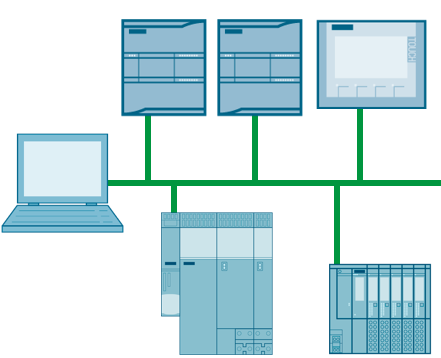
图 6、网络图
S7-1200 除了支持作为 Profinet IO 控制器以外,还可以作为智能设备,此时除了可以与控制器进行较大数据量的实时通信,本身还可以作为控制器连接下层 IO 设备,进行分布式控制,并且无需任何附加设备。通常适用于大项目下的分站控制。如图 7 中所示,智能设备 1 与 智能设备 2 作为 IO 控制器 1 的 智能设备,同时智能设备 3 作为智能设备 2 的 智能设备,
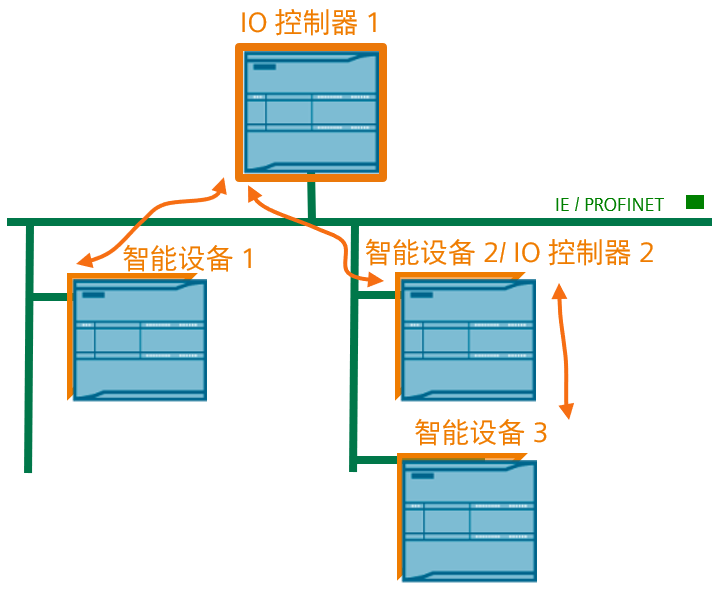
图 7、智能设备
如图 8 所示,对于双网口的 S7-120
CPU (左边 CPU)还支持 MRP 环网管理员和客户端功能,这样在网络中有一根网线中断时不影响通信。
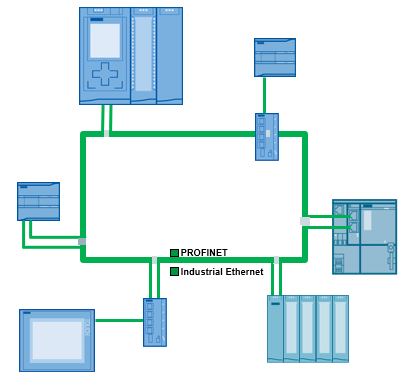
图 8、MRP 环网
通过扩展 Profibus 模块, S7-1200 还可以实现 Profibus 通信,实现与 TIA Portal、HMI、Profibus DP 主站/从站 的通信,如图 9 所示。
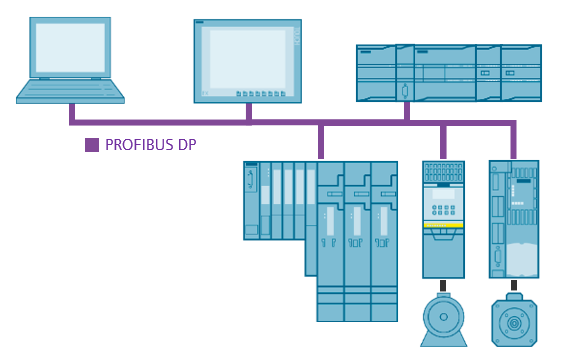
图 9、Profibus 通信
通过扩展串口模块,S7-1200 还可以实现自由口、Modbus RTU 、USS 等协议的通信,如图 10 所示。

图 10、串口通信
工艺功能介绍
S7-1200 具有以下四种工艺功能:PID、运动控制、高速计数器、PWM 脉宽调制,以下分别介绍。
- PID
- 运动控制
- 高速计数器
- PWM 脉宽调制
PID
S7-1200 支持 3 种 PID 指令,以及多种辅助指令,3 种 PID 指令分别是 PID_Compact、PID_3Step、PID_Temp,它们分别应用于不同场合。
S7-1200 通常通过工艺对象进行 PID 控制,PID 回路数不限,只受 CPU 的存储器限制。
PID_Compact ,一般的 PID 场合都可以使用,输入可以是模拟量输入或者是工程量输入,输出通过开度(0-100%)、模拟量(0-27648)、脉冲三种同时输出。可以进行预调节和精确调节的自整定,可以反比例控制,不支持死区功能。
PID_3Step ,专门用于控制阀门、电动执行器的 PID 指令,输入可以是模拟量输入或者是工程量输入,反馈输入还可以增加执行器的限位与开度反馈,输出可以选择通过模拟量或者开闭阀门的数字量。可以进行预调节和精确调节的自整定,可以反比例控制,支持死区功能,支持考虑执行器的动作时间。
PID_Temp,是功能最强的 PID 指令,除了 PID_Compact 的基础功能以外,还支持一套输入输出同时进行正反比例控制(例如加热制冷),此外还支持串级控制,多段区域同时调节,死区功能,控制带功能等。
运动控制
S7-1200 支持 3 种运动控制:开环脉冲、闭环总线、闭环模拟量,其中开环无需编码器反馈,而闭环需要编码器反馈,编码器通常使用本体高速计数功能、支持 Profidrive 的编码器或者连接分布式 IO 的编码器模块(例如 ET200SP 的 TM Count)。
运动控制组态必须使用工艺对象,对于每一种 S7-1200 CPU 开环脉冲方式最多支持 4 轴,而闭环方式总计最多支持 8 轴。
S7-1200 开环脉冲需要通过 CPU 本体的晶体管 Q 点或者信号板才可以支持,通常使用脉冲 + 方向的方式。本体最多支持 100 kHz 源型输出信号,而信号板最多支持 200kHz 源型/漏型输出信号,值得注意的是 CPU1217C 支持 1MHz 差分输出,可以连接有更高需求的驱动器。
S7-1200 闭环总线通常连接具有 Profidrive 功能的驱动器,使用 3 号报文,例如西门子 V90、S120 等。
S7-1200 闭环模拟量需要通过 AO 信号连接驱动器。
这 3 种控制方式最终通过统一的编程指令即可实现运动控制。
连接示意如图 11 - 13 所示。
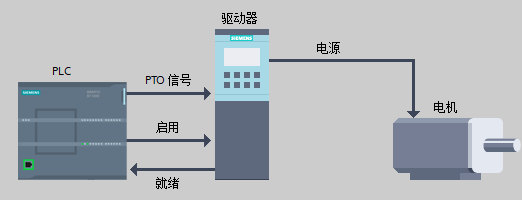
图 11、开环脉冲
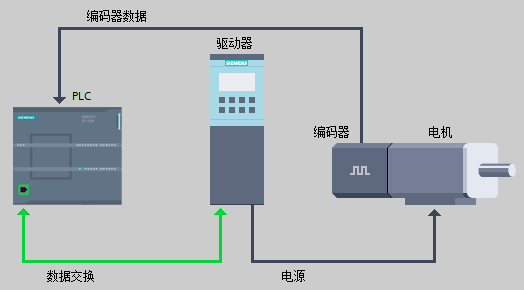
图 12、闭环总线
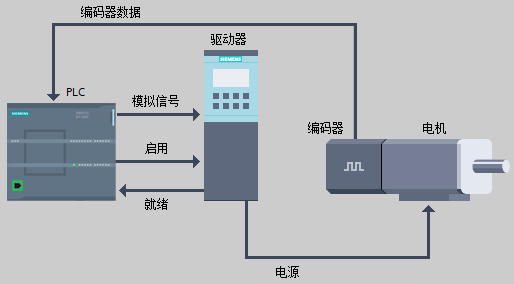
图 13、闭环模拟量
高速计数器
S7-1200 本体及信号板支持最多 6 路高速计数器,本体支持最高可达 100 kHz 的漏型/源型高速脉冲,CPU 1217C 的差分信号可以支持最高 1MHz,通过信号板可以支持最高 200kHz 源型信号并且提供了 DC 5V 的版本。
高速计数器可以是 A/B 正交增量编码器,也可以是单脉冲信号等。
组态高速计数器可以获取计数值、频率、周期等值,当然也可以连接闭环运动控制的反馈信号。
高速计数器的功能包括:软件门、硬件门、外部复位、捕捉实时计数值、满足条件触发硬件中断(例如当前计数值等于设定值)、比较输出等。
PWM 脉宽调制
S7-1200 本体晶体管 Q 点或者信号板支持最多 4 路 PWM 脉冲输出。本体最多支持 100 kHz 源型输出信号,而信号板最多支持 200kHz 源型/漏型输出信号,CPU1217C 支持 1MHz 差分输出。
通过硬件组态可以配置脉宽和循环时间,这两个值可以在运行时实时修改。