- 打开“运动控制”向导,“工具”->“向导”->“运动控制”
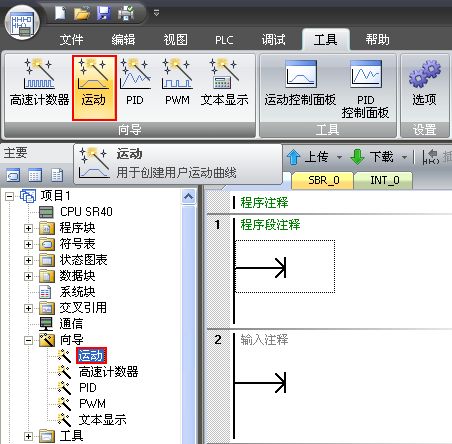
图 1.打开“运动控制”向导
- 选择需要配置的轴
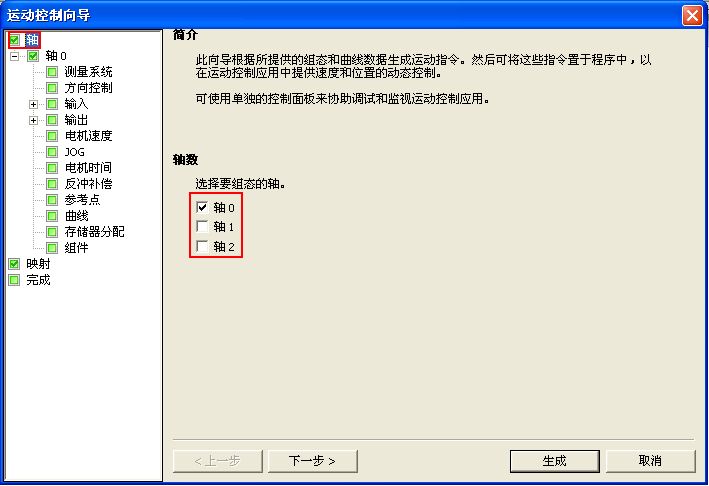
图 2.选择需要配置的轴
- 为所选择的轴命名

图 3.为所选择的轴命名
- 输入系统的测量系统(“工程量”或者“脉冲数/转”)
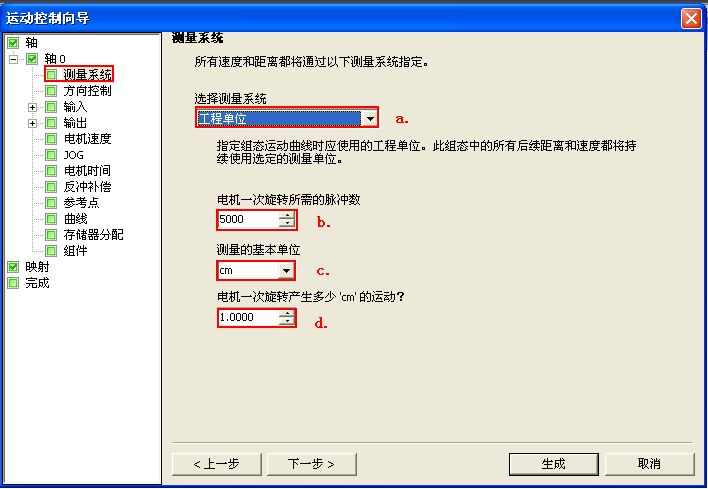
图 4.选择测量系统
a.选择工程单位或者是脉冲数;
b.选择电机每转脉冲数;
c.选择基本单位 ;
d.输入电机每转运行距离
- 设置脉冲方向输出
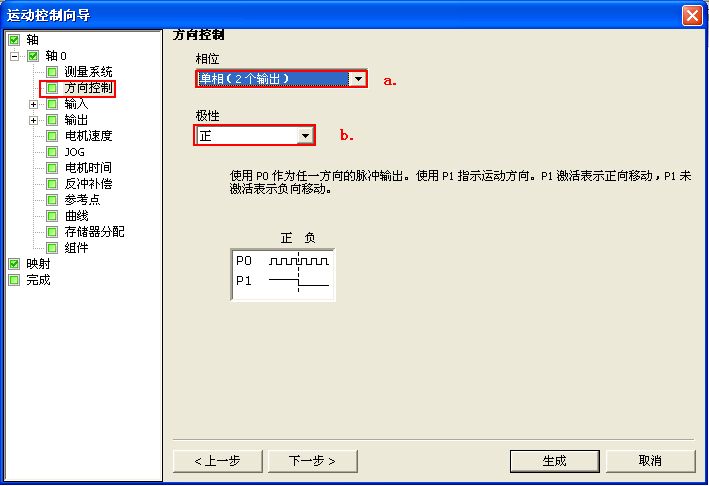
图 5.设置脉冲方向输出
a.设置有几路脉冲输出(单相:1路、双向:2路、正交:2路);
b.设置脉冲输出极性和控制方向。
- 分配输入点
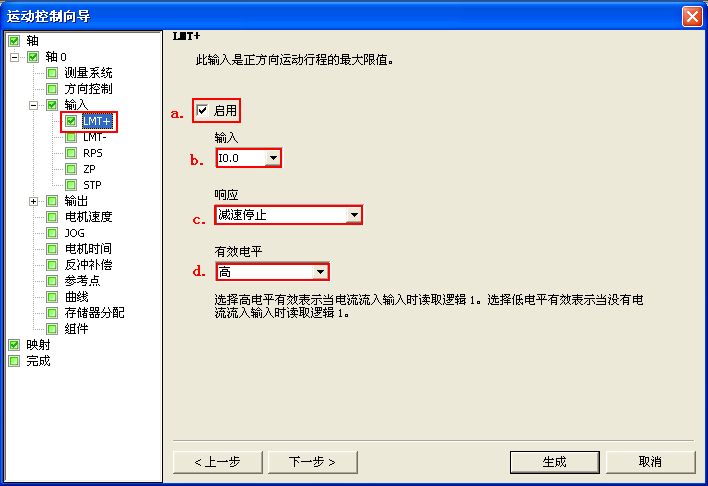
图 6.配置正限位输入点
a.正限位使能;
b.正限位输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号有效电平(低电平有效或者高电平有效)。
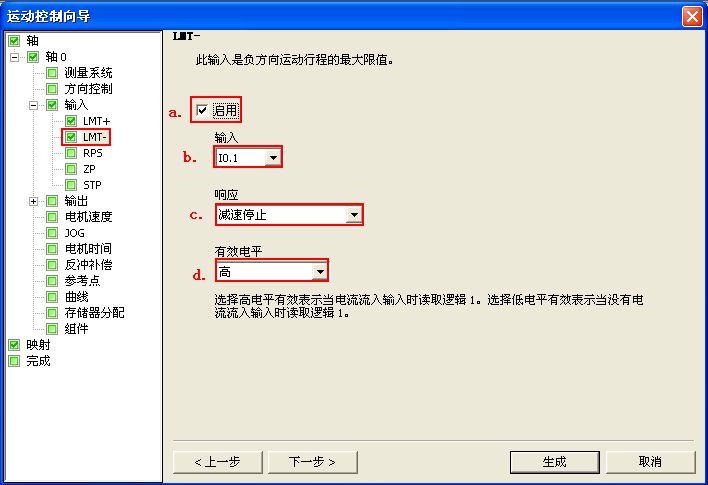
图 7.配置负限位输入点
a.负限位使能;
b.负限位输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号有效电平(低电平有效或者高电平有效)。
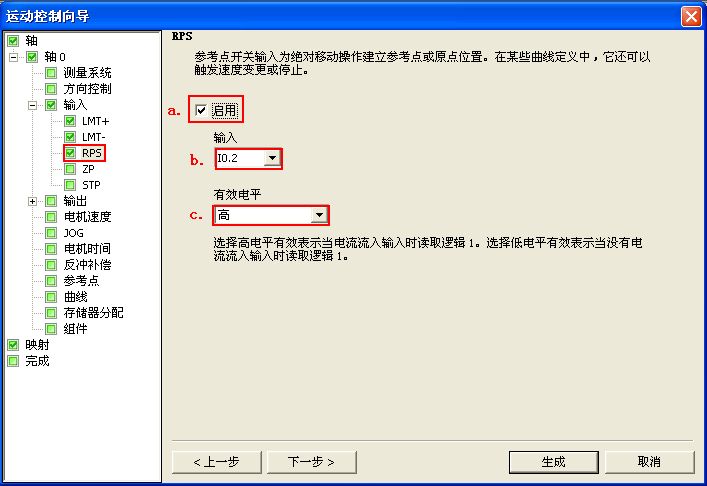
图 8.配置参考点
a.使能参考点;
b.参考点输入点;
c.指定输入信号有效电平(低电平有效或者高电平有效)。
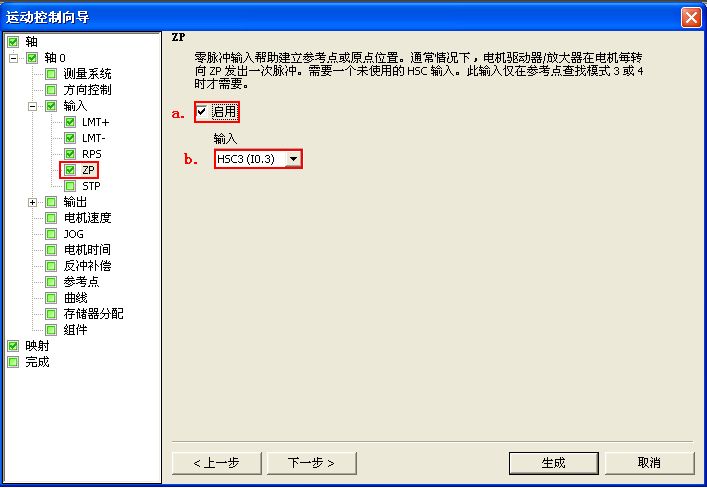
图 9.配置零脉冲
a.使能零脉冲:
b.零脉冲输入点。
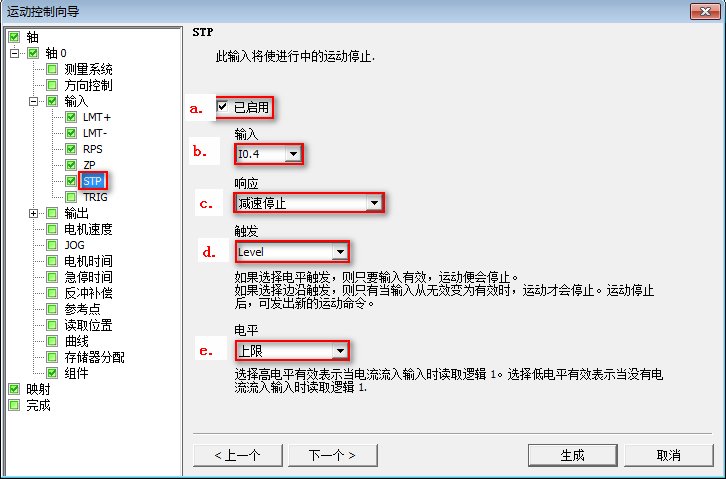
图 10.配置停止点
a.使能停止点;
b.停止输入点;
c.指定相应输入点有效时的响应方式;
d.指定输入信号的触发方式,可以选择电平触发或者边沿触发。
e.指定输入信号有效电平(低电平有效或者高电平有效)。
- 定义输出点
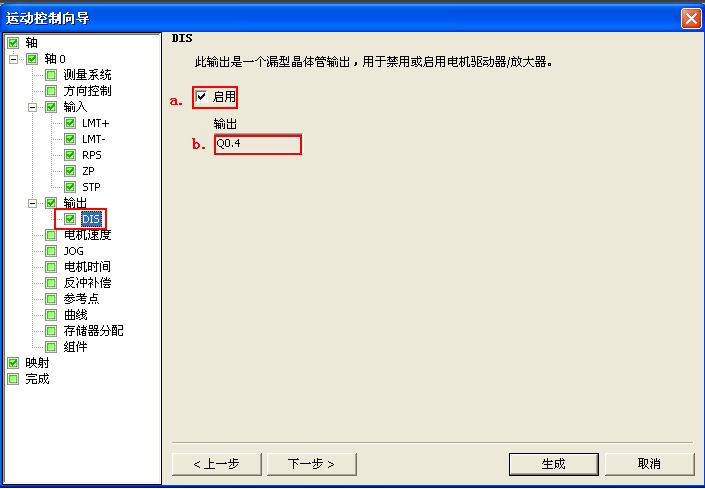
图 11.定义输出点
注意:每个轴的输出点都是固定的用户不能对其进行修改,但是可以选择使能/不使能 DIS。
- 定义电机的速度
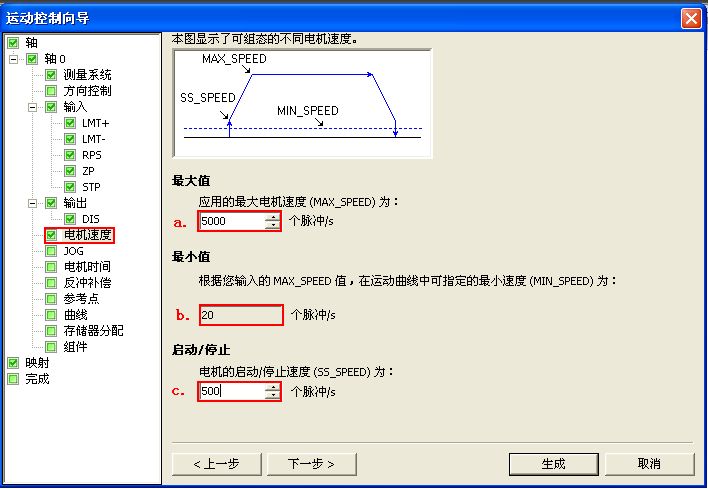
图 12.定义电机的速度
a.定义电机运动的最大速度“MAX_SPEED”;
b.根据定义的最大速度,在运动曲线中可以指定的最小速度;
c.定义电机运动的启动/停止速度“SS_SPEED” 。
- 定义点动参数
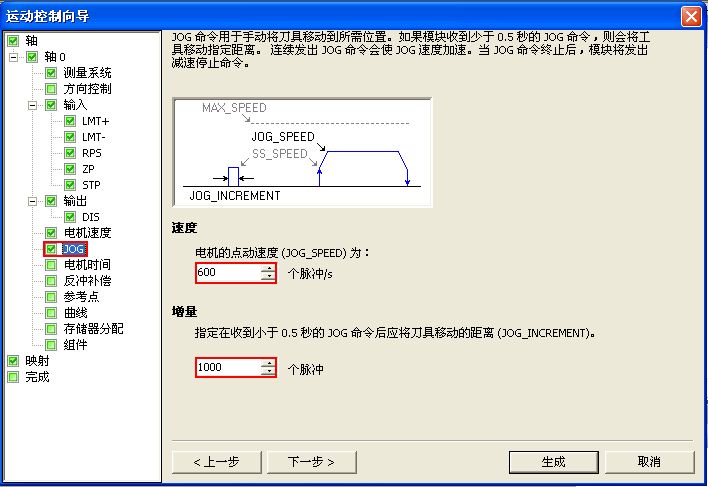
图 13.定义点动参数
a.定义点动速度“JOG_SPEED”(电机的点动速度是点动命令有效时能够得到的最大速度);
b.定义点动位移“JOG_INCREMENT”(点动位移是瞬间的点动命令能够将工件运动的距离)。
注意:当 CPU 收到一个点动命令后,它启动一个定时器。如果点动命令在0.5秒到时之前结束,CPU 则以定义的SS_SPEED速度将工件运动JOG_INCREMENT数值指定的距离。当0.5秒到时时,点动命令仍然是激活的,CPU 加速至JOG_SPEED速度。继续运动直至点动命令结束,随后减速停止。
- 加/减速时间设置
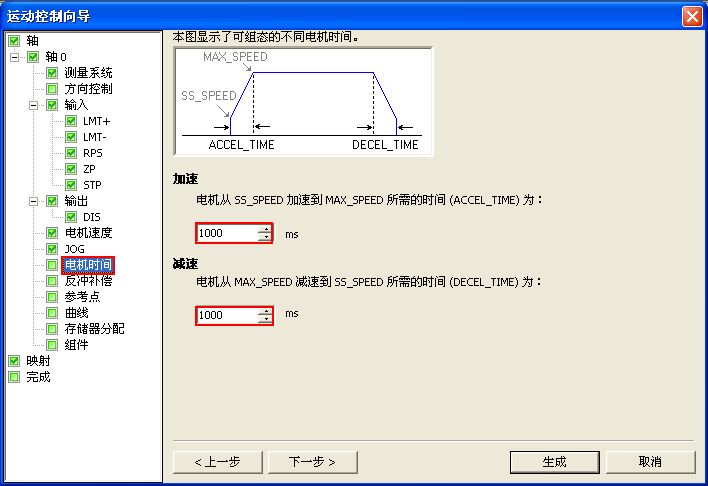
图 14.加/减速时间设置
a.设置从启动/停止速度“SS_SPEED”到最大速度“MAX_SPEED"的加速度时间“ACCEL_TIME”;
b.设置从最大速度“MAX_SPEED”到启动/停止速度“SS_SPEED”的减速度时间“DECEL_TIME ”。
- 定义反冲补偿
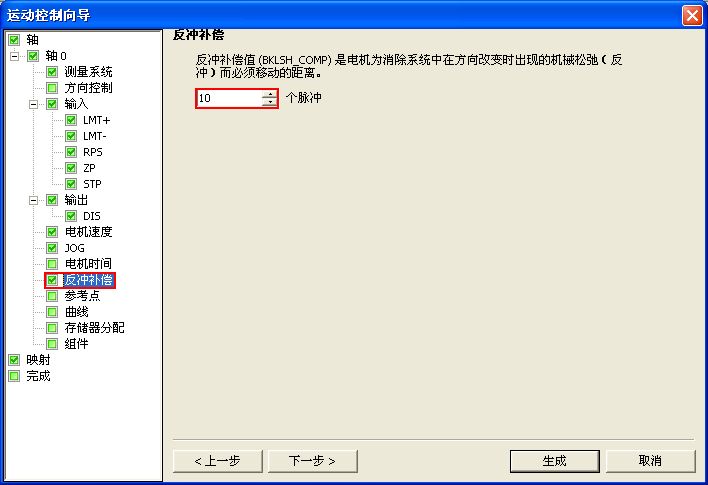
图 15.定义反冲补偿
注意:反冲补偿为当方向发生变化时,为消除系统中因机械磨损而产生的误差,电机必须运动的距离。反冲补偿总是正值。(缺省=0)
- 使能寻找参考点位置
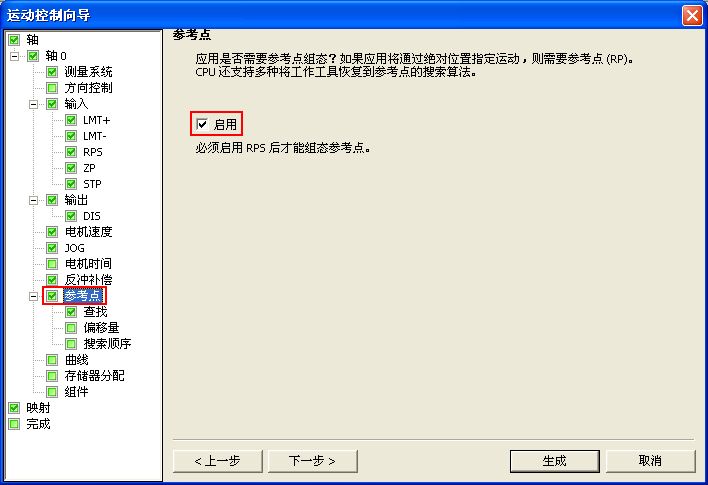
图 16. 使能寻找参考点位置
注意:若您的应用需要从一个绝对位置处开始运动或以绝对位置作为参考,您必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。 - 设置寻找参考点位置参数
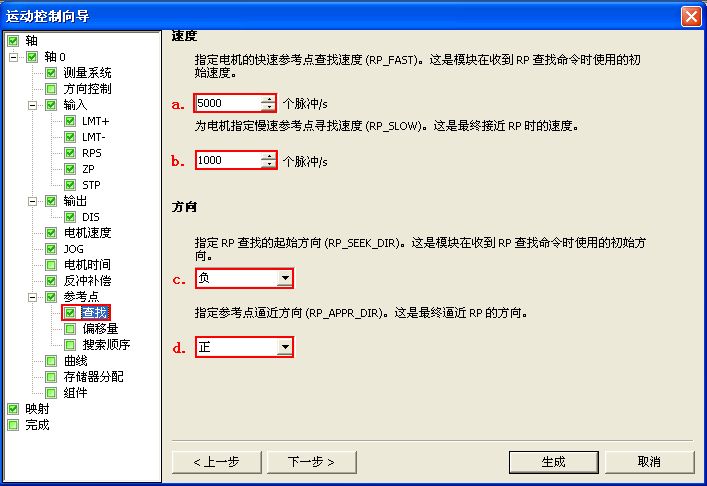
图 17.设置寻找参考点参
a.定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b.定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c.定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d.定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。
- 设置参考点偏移量
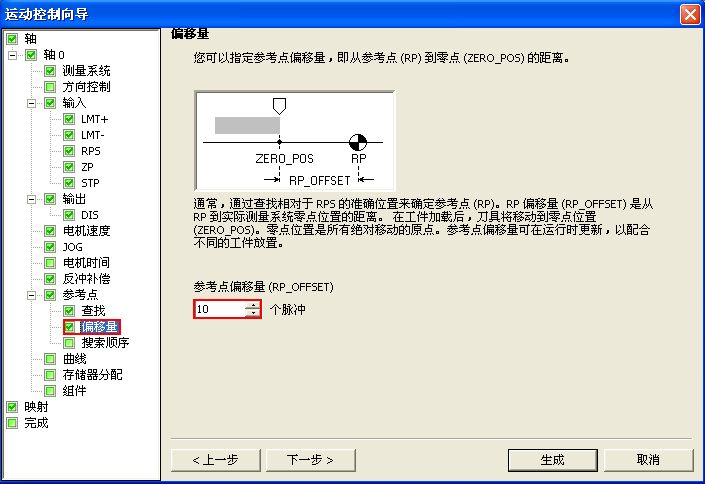
图 18.设置参考点偏移量
注意:参考点偏移量“RP_OFFSET是”在物理的测量系统中RP到零位置之间的距离,缺省=0。
- 设置寻找参考点顺序
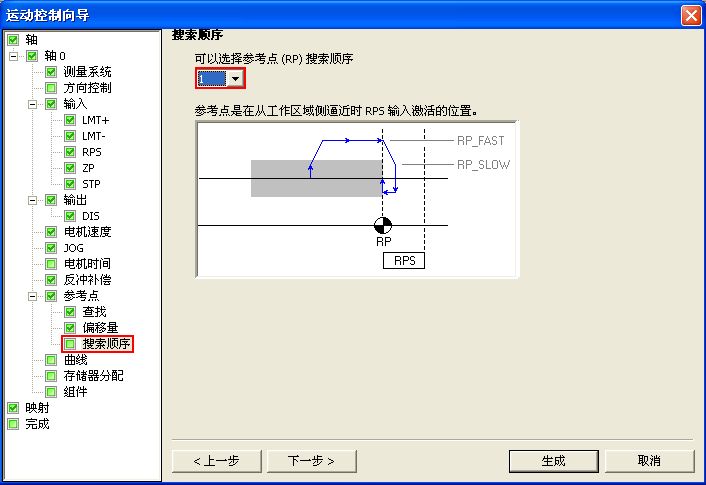
图 19.设置寻找参考点顺序
S7-200 SMART 提供4中寻找参考点顺序模式,每种模式定义如下:
RP寻找模式1:RP位于RPS输入有效区接近工作区的一边开始有效的位置上;
RP寻找模式2:RP位于RPS输入有效区的中央;
RP寻找模式3:RP位于RPS输入有效区之外,需要指定在RPS失效之后应接收多少个ZP(零脉冲)输入;
RP寻找模式4:RP通常位于RPS输入的有效区内,需要指定在RPS激活后应接收多少个ZP(零脉冲)输入。
- 新建运动曲线并命名
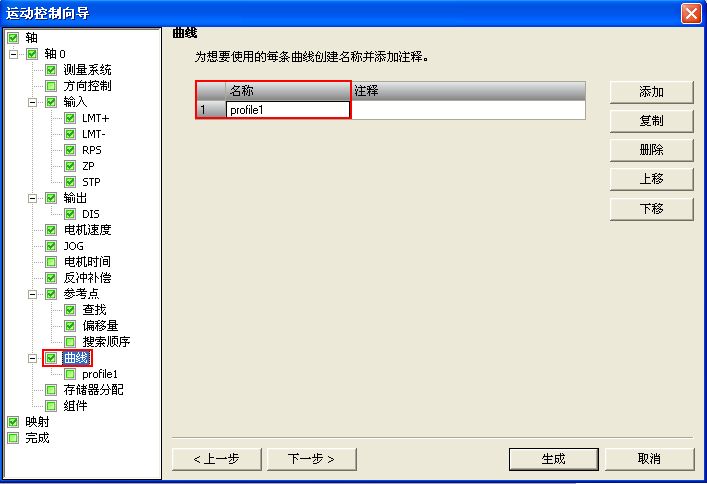
图 20.新建运动曲线并命名
通过点击“添加(Add)”按钮添加移动曲线并命名。
注意:S7-200 SMART 支持最多32组移动曲线。运动控制向导提供移动曲线定义,在这里,您可以为您的应用程序定义每一个移动曲线。运动控制向导中可以为每个移动曲线定义一个符号名,其做法是您在定义曲线时输入一个符号名即可。
- 定义运动曲线
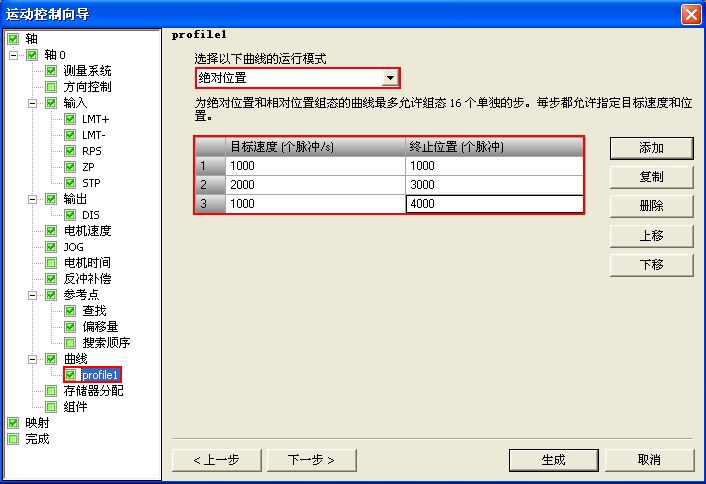
图 21.定义运动曲线
a.选择移动曲线的操作模式(支持四种操作模式:绝对位置、相对位置、单速连续旋转、两速连续转动);
b.定义该移动曲线每一段的速度和位置(S7-200 SMART 每组移动曲线支持最多16步)。
- 为配置分配存储区
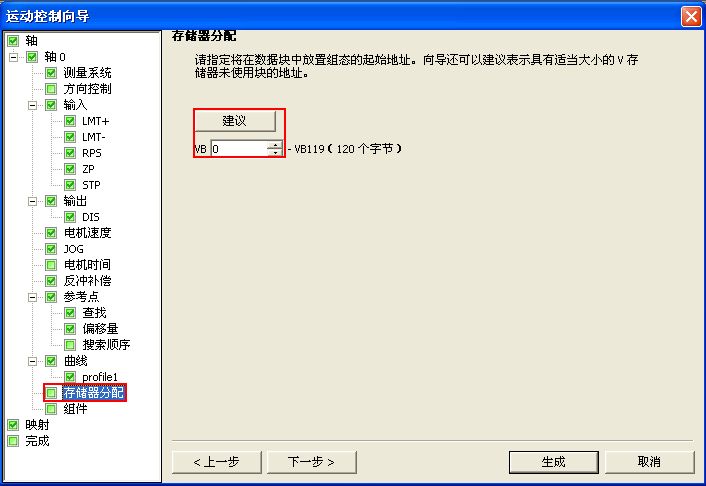
图 22.为配置分配存储区
通过点击“建议(Suggest)”按钮分配存储区
注意:程序中其他部分不能占用该向导分配的存储区。
- 完成组态
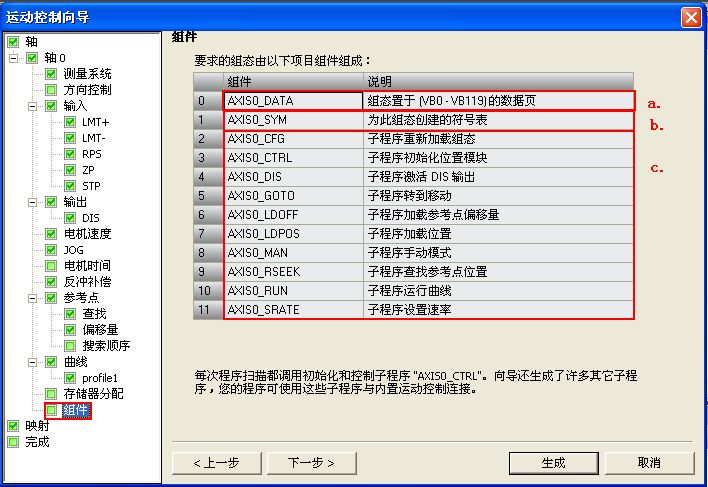
图 23.向导生成的组件
当您完成对运动控制向导的组态时,只需点击生成(Generate),然后运动控制向导会执行以下任务:
a. 将组态和曲线表插入到您的 S7-200 SMART CPU 的数据块(AXISx_DATA)中;
b. 为运动控制参数生成一个全局符号表(AXISx_SYM);
c. 在项目的程序块中增加运动控制指令子程序,您可在应用中使用这些指令;
要修改任何组态或曲线信息,您可以再次运行运动控制向导。
注意:由于运动控制向导修改了程序块、数据块和系统块,要确保这三种块都下载到 S7-200 SMART CPU 中。否则,CPU 可能会无法得到操作所需的所有程序组件。
- 查看输入输出点分配
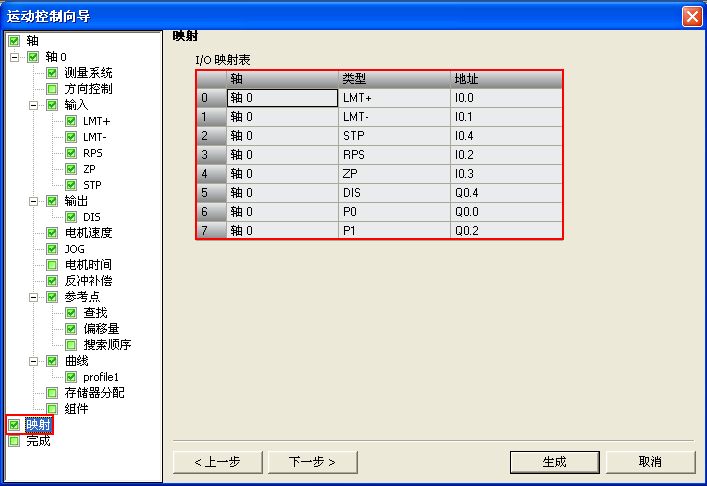
图 24.输入输出点分配
完成配置后运动控制向导会显示运动控制功能所占用的 CPU 本体输入输出点的情况。
西门子S7-SMART运动控制向导
news2026/2/12 9:32:46
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2203365.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

开机启动项在哪里关闭?五个全面指南,教你关闭开机启动项!(新)
您是否发现您的电脑运行性能正在受一些无关紧要的应用程序所影响呢?也许您没有意识到,每当您登录电脑时,许多程序会在不知情的情况下自动启动。这些自动启动的程序不仅会拖慢系统的运行速度,还会占用大量的内存和cpu资源。为了改善…

QT:绘制事件和定时器
1.绘制时针
xx.h
#ifndef WIDGET_H
#define WIDGET_H#include <QWidget>
#include <QTimer>
#include<QPainter>
#include <QTime>QT_BEGIN_NAMESPACE
namespace Ui { class Widget; }
QT_END_NAMESPACEclass Widget : public QWidget
{Q_OBJECTpubl…

YOLOv11进行图像与视频的目标检测
一、AI应用系统实战项目
项目名称项目名称1.人脸识别与管理系统2.车牌识别与管理系统3.手势识别系统4.人脸面部活体检测系统5.YOLOv8自动标注6.人脸表情识别系统7.行人跌倒检测系统8.PCB板缺陷检测系统9.安全帽检测系统10.生活垃圾分类检测11.火焰烟雾检测系统12.路面坑洞检测…
使用Qt Creator创建项目
个人主页:C忠实粉丝 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 C忠实粉丝 原创 使用Qt Creator创建项目 收录于专栏【Qt开发】 本专栏旨在分享学习Qt的一点学习笔记,欢迎大家在评论区交流讨论💌 目录 温馨提示:
1. 新…
Fastjson反序列化
Fastjson反序列化一共有三条利用链
TempLatesImpl:实战中不适用JdbcRowSetImpl:实际运用中较为广泛BasicDataSource(BCEL)
反序列化核心
反序列化是通过字符串或字节流,利用Java的反射机制重构一个对象。主要有两种…

Spring Boot 进阶-详解Spring Boot与其他框架整合
通过前面的文章,我们了解到了Spring、Spring Boot框架都是为Java企业级开发提供了一个基础框架,我们可以通过这个基础框架去整合其他的框架来实现我们具体的业务功能。 在网站上搜索一下,Spring Boot整合某某框架就会出现大量的教程,但是总会有一天你会遇到一个你没有教程的…

jenkins中的allure和email问题梳理
一、allure相关
1、我安装了jenkins之后需要再安装allure吗?在jenkins插件中心直接安装allure
1.Allure Jenkins Plugin 只是一个集成插件,它要求你在 Jenkins 服务器上安装 Allure 命令行工具(Allure Commandline)来实际生成报…

真的有被Transformer多头注意力惊艳到…
在这篇文章中,我们将深入探讨 Transformer 的核心部分-多头注意力(Multi-head Attention)。
这个机制能让 Transformer 同时从多个角度理解数据,提高处理信息的能力和效率。
01、Transformer 中如何使用注意力机制
Transformer…
![[数据结构]带头双向循环链表的实现与应用](https://i-blog.csdnimg.cn/direct/0d70260fa5064c9289bb9e5654f930f2.png)
[数据结构]带头双向循环链表的实现与应用
文章目录 一、引言二、链表的基本概念1、链表是什么2、链表与顺序表的区别3、带头双向循环链表 三、带头双向循环链表的实现1、结构体定义2、初始化3、销毁4、显示5、增删查改 四、分析带头双向循环链表1、存储方式2、优点3、缺点 五、总结1、练习题2、源代码 一、引言
链表作…

修复PDF打印速度慢
详细问题:
当您尝试将 PDF 文件打印到本地或网络打印机时,打印需要很长时间,因为发送打印作业后,打印机开始打印的速度非常慢,在打印任务中可以看到打印传输的数据在缓慢增长。 从其他程序打印时也不会出现打印速度慢…

c++的web框架Restbed介绍及在嵌入式Linux下的移植详解
随着物联网和嵌入式设备的普及,开发高性能的网络服务变得愈发重要。Restbed是一个用于构建RESTful APIs的轻量级C框架,因其简洁而强大的特性,成为开发者的热门选择。本文将介绍Restbed框架及其在嵌入式Linux平台上的移植方法。 一、Restbed框…

东方博宜 1176. 素数问题
东方博宜 1176. 素数问题
#include<iostream>
using namespace std;
int main()
{ int n ;while(cin >> n && n!0) {int count_n ;count_n 0 ;int k ;for( k 1 ; k < n ; k){int count_k ;count_k 0 ;int j ;for( j 2 ; j < k ; j){if (k % j …

基于SSM的大学生勤工助学管理系统(含源码+sql+视频导入教程+文档+PPT)
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频
1 、功能描述 基于SSM的大学生勤工助学管理系统1拥有三种角色:管理员、学生和用工部门,具体功能如下 1.1 背景描述 基于SSM框架(SpringSpring MVCMyBatis)…

Java微信支付接入(1) - API V3 引入支付参数
1.定义微信支付相关参数
wxpay.properties 文件 这个文件定义了之前我们准备的微信支付相关的参数,例如商户号、APPID、API秘钥等等
# 微信支付相关参数
# 商户号
wxpay.mch-id1558950191
# 商户API证书序列号
wxpay.mch-serial-no34345964330B66427E0D3D28826C49…
![HTB:Base[WriteUP]](https://i-blog.csdnimg.cn/direct/f6f6bedc2f1946818609868038d63b2a.png)
HTB:Base[WriteUP]
目录
连接至HTB服务器并启动靶机
1.Which two TCP ports are open on the remote host?
2.What is the relative path on the webserver for the login page?
3.How many files are present in the /login directory?
4.What is the file extension of a swap file?
…

DeepACO:用于组合优化的神经增强蚂蚁系统解决TSP问题的代码阅读
总体概括 DeepACO与普通ACO不同的是将问题输入实例输入到一个训练的网络中,将网络训练成为一个类似于专家知识的模块,可以生成相应的启发式矩阵网络,从而省去相应的专家知识。 其中在训练网络的代码中: 是进行监督式训练通过trai…

虚幻引擎GAS入门学习笔记(一)
虚幻引擎GAS入门(一)
Gameplay Ability System(GAS) 是一个模块化且强大的框架,用于管理虚幻引擎中的游戏玩法逻辑。它的核心组成部分包括 Gameplay Ability(定义和执行能力)、Gameplay Effect(应用和管理…

数字安全新时代:聚焦关键信息基础设施安全保障——The Open Group 2024生态系统架构·可持续发展年度大会盛大来袭
在全球数字化转型的浪潮中,关键信息基础设施(Critical Information Infrastructure,简称CII)的安全保障已成为各国政府和企业共同关注的焦点。随着技术的飞速发展和网络威胁的日益复杂,如何构建高效、灵活且安全的数字…

“Flash闪存”基础 及 “SD NAND Flash”产品的测试介绍
目录
一、“FLASH闪存”是什么?
1. 简介
2. 分类
3. 特点
4. 虚拟化
二、SD NAND Flash
1. 概述
2. 特点
3. 引脚分配
4. 数据传输模式
5. SD NAND寄存器
6. 通电图
7. 参考设计
三、STM32测试例程
1. 初始化
2. 单数据块测试
3. 多数据块测试
4.…

SSD | (一)SSD综述
文章目录 📚SSD综述🐇SSD基本结构🐇SSD与HDD🐇SSD基本工作原理⭐SSD请求处理流程⭐SSD主要组成模块⭐SSD读写操作 🐇SSD产品核心指标⭐基本信息⭐性能指标⭐数据可靠性和寿命⭐功耗 📚可计算存储 …