目录
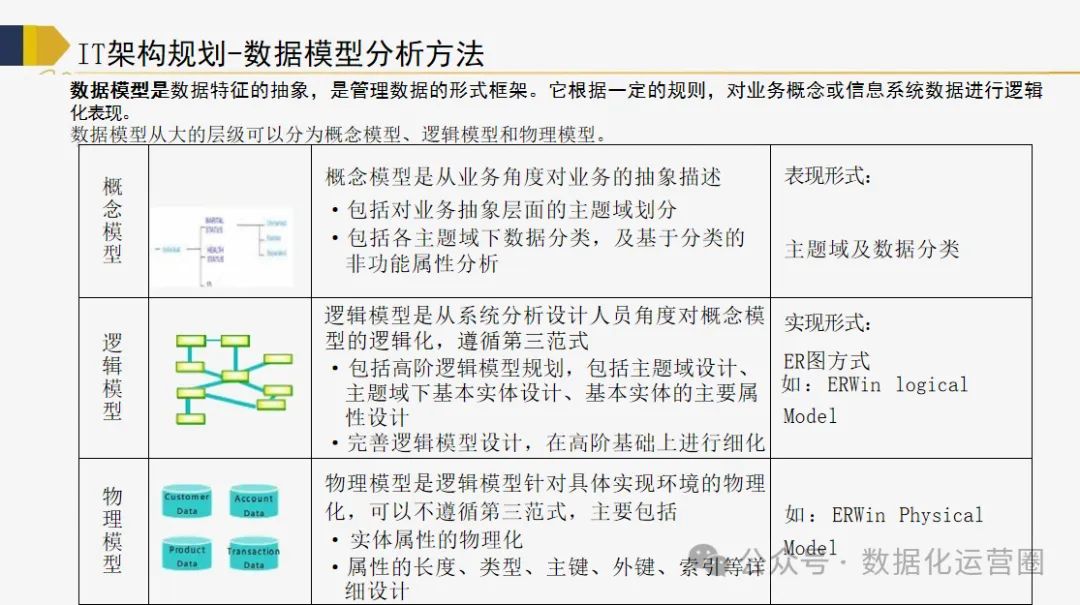
一.复杂的机器人系统
二.ROS机器人系统
1.简介
1.节点
2.话题
2.安装
3.测试
4.可视化
RQT:
RVIZ:
显示属性:
显示状态:
一.复杂的机器人系统
依照我们现在的技术来看,机器人系统仍是极其复杂的,往往一个系统就需要数以百计的工程师开发。一个机器人集成了多个领域的多个人的共同智慧,例如:机械工程、电子工程、计算机科学、控制理论等。
我们知道一个系统由通俗地简单地讲是由硬件和软件部分构成的,其中硬件部分包括控制核心,驱动器,执行器,传感器等组成;而软件部分则特定的操作系统,中间件,驱动层,应用层等组成。
二.ROS机器人系统
要认识并理解ROS,我们必须要对Linux或Ubuntu有一些基础的认识,且要会操作,因此:建议大家先补充前置知识:
【学习笔记】ARM64平台下的ubuntu学习总结
1.简介
而提到软件部分,我们就不得不提到一个在机器人领域不可避免的系统——ROS系统。ROS就是传说中的机器人操作系统(Robot Operating System),但其本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac)上的软件库和工具集。
实际上,ROS的作用就是提供一个将机器人硬件部件连接起来的简易的软件系统,同时避免了机器人开发中开发者重复造轮子,大大提升了机器人工程的开发效率。
ROS为此设计了一整套通信机制(话题、服务、参数、动作)。通过这些通信机制,ROS实现了将机器人的各个组件给的连接起来。
其中ROS1和ROS2架构分别如下:


首先我们要了解DDS(Data Distribution Service),这是ROS2中的最重要的协议标准。它通过类似于ROS1中的话题发布和订阅形式来进行通信,同时提供了丰富的服务质量管理来保证可靠性、持久性、传输设置等。
围绕DDS又抽象出两层:
- DDS实现层:对不同常见的DDS接口进行再次的封装,让其保持统一性,为DDS抽象层提供统一的API。
- DDS抽象层:这一层将DDS实现层进一步的封装,使得DDS更容易使用。原因在于DDS需要大量的设置和配置(分区,主题名称,发现模式,消息创建,…),这些设置都是在ROS2的抽象层中完成的。
再往上就是RCL(ROS Client Library)ROS客户端库,是ROS的一种API,提供了对ROS话题、服务、参数、Action等接口。不同语言(Python,C++等)有着不同的RCL库,对应相同的功能。
1.节点
如果要学习ROS,我们一定要先理解Node(节点)的含义,这是ROS最常用的概念。一般来说,一个节点往往是一个可执行程序(c++,python等),负责执行一个特定的单一任务,比如发送图像数据的节点,控制车辆运动的节点。节点之间可以通过话题topic,服务service,参数parameter和动作action相互通信,形成一个网络拓扑,即 ros graph,最终完成一个复杂的任务,比如自动驾驶车辆。
2.话题
两个节点node之间需要通信,最重要的方式就是话题 topic ,其相当于一个公共汽车 bus ,里面装载两个节点间约定好格式的消息 msg。
发布/订阅模型:话题是基于发布/订阅模型的通信方式。在这种模型中,数据的生产者(发布者)发布数据到特定的话题,而数据的消费者(订阅者)订阅该话题以接收数据。
数据流:话题可以看作是一个数据流,发布者不断地将数据发送到话题上,而订阅者则从话题上接收这些数据。
非持久性:话题上的数据是实时传输的,一旦发布者发布了数据,订阅者要么即时接收,要么数据就会丢失(除非使用特定的历史记录功能)。
2.安装
这里推荐鱼香大大开发的一键安装脚本
在终端键入:
wget http://fishros.com/install -O fishros && . fishros按照提示依次选择即可安装ROS2。
3.测试
第一种测试方法:
这里我们启动两个节点(注意要打开两个终端Ctrl+Alt+T分别键入),一个为Listen节点,一个为Speaker节点 ,分别用于收消息和发消息。
ros2 run demo_nodes_py listener
ros2 run demo_nodes_cpp talker
现象如下:

第二种测试方法(小海龟):
打开一个终端键入:
ros2 run turtlesim turtlesim_node
启动小海龟:

再打开一个新的终端,键入:
ros2 run turtlesim turtle_teleop_key
这时我们就可以使用键盘的方向键控制小海龟了。注:当我们的聚焦在这个命令的终端时才能有效控制!

4.可视化
ROS系统中有两个极其重要的可视化工具:RQT(Robot Qt Graphics User Interface)和RVIZ(Robot Visualization Tool)。其中RVIZ是一个3D可视化工具,主要用于显示传感器信息,导航地图等信息;RQT则是一个用于创建和管理ROS图形界面的工具,以便开发者实时查看和调试ROS系统。
RQT:
这里我们先体验一下RQT,向终端中键入:
rqt

我们选择选项卡中的Plugins->Introspection->Node Graph 之后就可看到节点相关的信息。

RVIZ:
首先必须要先向终端中键入:
source /opt/ros/jazzy/setup.bash
setup.bash:这是一个Bash脚本,它包含了设置ROS环境变量所需的命令。这个脚本通常做了以下几件事情:
- 设置
ROS_ROOT、ROS_PACKAGE_PATH、ROS_MASTER_URI、ROS_IP等环境变量。- 将ROS的bin目录添加到系统的PATH环境变量中,这样就可以直接在终端中运行ROS命令和节点。
- 设置其他可能需要的ROS相关的环境变量。
执行这条命令后,你就可以在当前终端会话中使用ROS的命令行工具、运行节点、使用ROS的包等。每次打开新的终端会话时,都需要重新执行这条命令(或者将其添加到你的
.bashrc或.bash_profile文件中,以便在每次打开终端时自动执行)。
然后运行以下命令启动RVIZ:
ros2 run rviz2 rviz2
这里只做简单说明:
中间的黑色窗口是 3D 视图。
显示器是指在 3D 世界中绘制某些内容的设备,并且可能在显示器列表中有一些可用选项。例如,点云、机器人状态等。
点击“ADD”即可添加新的显示器。
显示属性:
每个显示器都有自己的属性列表。
显示状态:
每个显示都有自己的状态,以帮助您了解一切是否正常。状态可以是:
OK、Warning、Error或Disabled。

RVIZ就简单介绍这些,更多的等日后再学。
如有错误,感谢指正!
未完待续。 。 。