目录
- 一、ACmix注意力机制
- 1.1ACmix注意力介绍
- 1.2ACmix核心代码
- 二、添加ACmix注意力机制
- 2.1STEP1
- 2.2STEP2
- 2.3STEP3
- 2.4STEP4
- 三、yaml文件与运行
- 3.1yaml文件
- 3.2运行成功截图
一、ACmix注意力机制
1.1ACmix注意力介绍

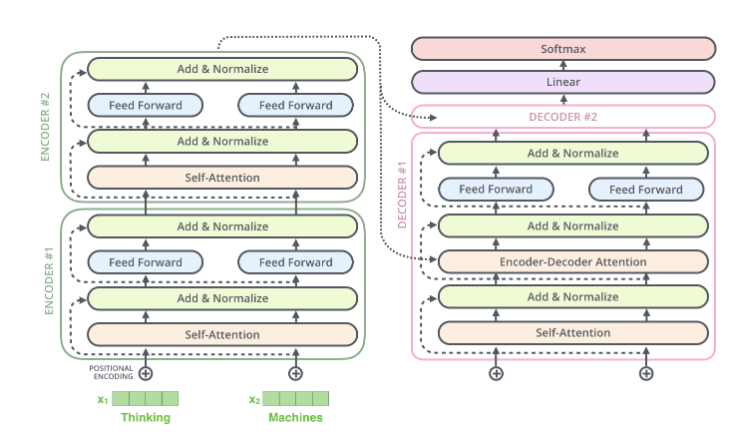
ACmix设计为一个结合了卷积和自注意力机制优势的混合模块,旨在通过融合两种机制的优点来增强模型的表示能力和性能。工作流程图如下所示其中:(a)卷积(Convolution)、(b)自注意力(Self-Attention) 和 ©ACMix。每种方法处理特征的方式不同,以下我将为您简要介绍每个模块的工作流程和其作用。
-
卷积(Convolution) (a)
Stage I: 输入的特征图通过多个1x1卷积进行特征投影,目的是将通道数减少或映射到不同的空间维度。这一步相当于一个线性变换。
Stage II: 接下来通过一个标准的3x3卷积核对特征图进行局部特征提取,这是一种固定的窗口操作,只关注局部邻域内的信息。
作用:卷积操作是一种高效的局部信息提取方式,在保持计算效率的同时能够有效捕捉局部模式。但其局限性在于缺乏对远程依赖关系的建模能力。 -
自注意力(Self-Attention) (b)
Stage I: 同样通过1x1卷积进行特征投影,将特征图映射到键(key)、查询(query)、值(value)的特征空间。
Stage II: 使用键和查询进行相似度匹配,生成注意力权重,进而通过权重加权得到新的特征表示。这个过程是全局的,因此每个位置的特征都可以与其他所有位置进行交互。
作用:自注意力机制的优势在于其能够建模全局依赖关系,使得每个特征点都可以捕捉到其他点的信息,特别适合处理长距离依赖的问题。然而,它的计算成本较高,特别是在大规模特征图上。 -
ACMix ©
Stage I: 首先通过1x1卷积将输入特征投影到较低的通道空间,随后进行位移和求和操作。这一步允许特征在空间上有一定的移动(Shift),增强了特征的多样性。
Stage II: 分别在空间域和通道域进行不同的操作。在空间域,进行类似卷积的局部特征提取;在通道域,采用注意力机制进行全局依赖关系建模。最后,将两者的结果通过加权方式融合。
作用:ACMix 模块结合了卷积的局部特征提取优势和自注意力的全局信息建模能力,在保持较高计算效率的同时兼具全局与局部特征的处理。它的创新点在于通过对空间和通道的分离操作,减少了全局建模的计算成本,同时提升了模型的表达能力。
总结:
卷积模块(图a)适用于局部特征提取,计算效率高但缺乏全局信息。
自注意力模块(图b)擅长全局依赖建模,但计算成本较高。
ACMix模块(图c)结合了卷积和自注意力的优点,能够有效处理局部和全局信息,同时保持相对较低的计算复杂度,非常适合需要在效率与全局依赖建模间平衡的任务。

1.2ACmix核心代码
import torch
import torch.nn as nn
def position(H, W, type, is_cuda=True):
if is_cuda:
loc_w = torch.linspace(-1.0, 1.0, W).cuda().unsqueeze(0).repeat(H, 1).to(type)
loc_h = torch.linspace(-1.0, 1.0, H).cuda().unsqueeze(1).repeat(1, W).to(type)
else:
loc_w = torch.linspace(-1.0, 1.0, W).unsqueeze(0).repeat(H, 1)
loc_h = torch.linspace(-1.0, 1.0, H).unsqueeze(1).repeat(1, W)
loc = torch.cat([loc_w.unsqueeze(0), loc_h.unsqueeze(0)], 0).unsqueeze(0)
return loc
def stride(x, stride):
b, c, h, w = x.shape
return x[:, :, ::stride, ::stride]
def init_rate_half(tensor):
if tensor is not None:
tensor.data.fill_(0.5)
def init_rate_0(tensor):
if tensor is not None:
tensor.data.fill_(0.)
class ACmix(nn.Module):
def __init__(self, in_planes, kernel_att=7, head=4, kernel_conv=3, stride=1, dilation=1):
super(ACmix, self).__init__()
out_planes = in_planes
self.in_planes = in_planes
self.out_planes = out_planes
self.head = head
self.kernel_att = kernel_att
self.kernel_conv = kernel_conv
self.stride = stride
self.dilation = dilation
self.rate1 = torch.nn.Parameter(torch.Tensor(1))
self.rate2 = torch.nn.Parameter(torch.Tensor(1))
self.head_dim = self.out_planes // self.head
self.conv1 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv2 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv3 = nn.Conv2d(in_planes, out_planes, kernel_size=1)
self.conv_p = nn.Conv2d(2, self.head_dim, kernel_size=1)
self.padding_att = (self.dilation * (self.kernel_att - 1) + 1) // 2
self.pad_att = torch.nn.ReflectionPad2d(self.padding_att)
self.unfold = nn.Unfold(kernel_size=self.kernel_att, padding=0, stride=self.stride)
self.softmax = torch.nn.Softmax(dim=1)
self.fc = nn.Conv2d(3 * self.head, self.kernel_conv * self.kernel_conv, kernel_size=1, bias=False)
self.dep_conv = nn.Conv2d(self.kernel_conv * self.kernel_conv * self.head_dim, out_planes,
kernel_size=self.kernel_conv, bias=True, groups=self.head_dim, padding=1,
stride=stride)
self.reset_parameters()
def reset_parameters(self):
init_rate_half(self.rate1)
init_rate_half(self.rate2)
kernel = torch.zeros(self.kernel_conv * self.kernel_conv, self.kernel_conv, self.kernel_conv)
for i in range(self.kernel_conv * self.kernel_conv):
kernel[i, i // self.kernel_conv, i % self.kernel_conv] = 1.
kernel = kernel.squeeze(0).repeat(self.out_planes, 1, 1, 1)
self.dep_conv.weight = nn.Parameter(data=kernel, requires_grad=True)
self.dep_conv.bias = init_rate_0(self.dep_conv.bias)
def forward(self, x):
q, k, v = self.conv1(x), self.conv2(x), self.conv3(x)
scaling = float(self.head_dim) ** -0.5
b, c, h, w = q.shape
h_out, w_out = h // self.stride, w // self.stride
# ### att
# ## positional encoding
pe = self.conv_p(position(h, w, x.dtype, x.is_cuda))
q_att = q.view(b * self.head, self.head_dim, h, w) * scaling
k_att = k.view(b * self.head, self.head_dim, h, w)
v_att = v.view(b * self.head, self.head_dim, h, w)
if self.stride > 1:
q_att = stride(q_att, self.stride)
q_pe = stride(pe, self.stride)
else:
q_pe = pe
unfold_k = self.unfold(self.pad_att(k_att)).view(b * self.head, self.head_dim,
self.kernel_att * self.kernel_att, h_out,
w_out) # b*head, head_dim, k_att^2, h_out, w_out
unfold_rpe = self.unfold(self.pad_att(pe)).view(1, self.head_dim, self.kernel_att * self.kernel_att, h_out,
w_out) # 1, head_dim, k_att^2, h_out, w_out
att = (q_att.unsqueeze(2) * (unfold_k + q_pe.unsqueeze(2) - unfold_rpe)).sum(
1) # (b*head, head_dim, 1, h_out, w_out) * (b*head, head_dim, k_att^2, h_out, w_out) -> (b*head, k_att^2, h_out, w_out)
att = self.softmax(att)
out_att = self.unfold(self.pad_att(v_att)).view(b * self.head, self.head_dim, self.kernel_att * self.kernel_att,
h_out, w_out)
out_att = (att.unsqueeze(1) * out_att).sum(2).view(b, self.out_planes, h_out, w_out)
## conv
f_all = self.fc(torch.cat(
[q.view(b, self.head, self.head_dim, h * w), k.view(b, self.head, self.head_dim, h * w),
v.view(b, self.head, self.head_dim, h * w)], 1))
f_conv = f_all.permute(0, 2, 1, 3).reshape(x.shape[0], -1, x.shape[-2], x.shape[-1])
out_conv = self.dep_conv(f_conv)
return self.rate1 * out_att + self.rate2 * out_conv
def autopad(k, p=None, d=1): # kernel, padding, dilation
# Pad to 'same' shape outputs
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
# Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
return self.act(self.conv(x))
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.Attention = ACmix(c2, 11)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.Attention(self.cv2(self.cv1(x))) if self.add else self.Attention(self.cv2(self.cv1(x)))
class C3_ACmix(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
if __name__ == "__main__":
# Generating Sample image
image_size = (1, 24, 224, 224)
image = torch.rand(*image_size)
# Model
mobilenet_v1 = ACmix(24, 24)
out = mobilenet_v1(image)
print(out)
二、添加ACmix注意力机制
2.1STEP1
首先找到ultralytics/nn文件路径下新建一个Add-module的python文件包【这里注意一定是python文件包,新建后会自动生成_init_.py】,如果已经跟着我的教程建立过一次了可以省略此步骤,随后新建一个ACmix.py文件并将上文中提到的注意力机制的代码全部粘贴到此文件中,如下图所示

2.2STEP2
在STEP1中新建的_init_.py文件中导入增加改进模块的代码包如下图所示
2.3STEP3
找到ultralytics/nn文件夹中的task.py文件,在其中按照下图添加
2.4STEP4
定位到ultralytics/nn文件夹中的task.py文件中的def parse_model(d, ch, verbose=True): # model_dict, input_channels(3)函数添加如图代码,【如果不好定位可以直接ctrl+f搜索定位】

三、yaml文件与运行
3.1yaml文件
以下是添加ACmix注意力机制在大目标检测层中的yaml文件,大家可以自行调节添加的层数,效果以自己的数据集结果为准
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
- [-1, 1, ACmix,[]]
- [[16, 19, 23], 1, Detect, [nc]] # Detect(P3, P4, P5)
以上添加位置仅供参考,具体添加位置以及模块效果以自己的数据集结果为准
3.2运行成功截图

OK 以上就是添加ACmix注意力机制的全部过程了,后续将持续更新尽情期待,同时将针对这个模块进行二次开发改进,请大家实时关注