承接上篇:
机器人领域超重量奖项TRO傅京孙最佳论文奖汇总【上】![]() https://blog.csdn.net/techflowai/article/details/142068484
https://blog.csdn.net/techflowai/article/details/142068484
2015年Best Paper
-
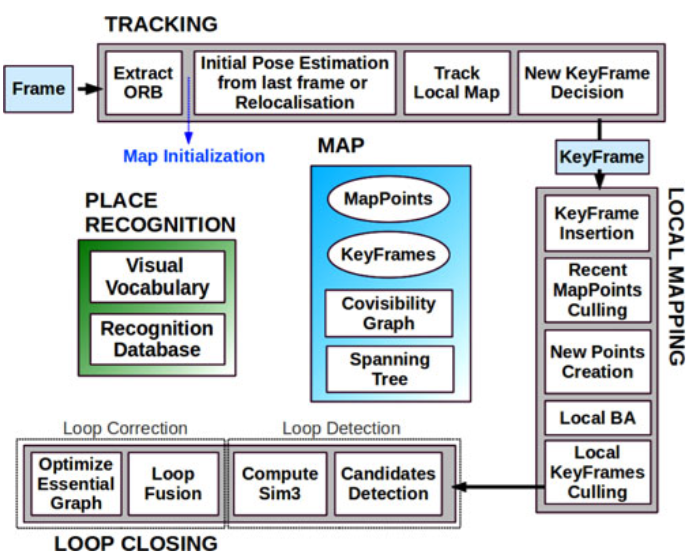
论文标题:ORB-SLAM: A Versatile and Accurate Monocular SLAM System
-
作者:Raúl Mur-Artal, J. M. M. Montiel, Juan D. Tardós
-
摘要
本文介绍了ORB-SLAM,这是一个基于特征的单目同时定位与地图构建(SLAM)系统,它能够在室内和室外的小规模和大规模环境中实时运行。该系统对严重运动模糊具有鲁棒性,允许宽基线闭环闭合和重定位,并包括完全自动初始化。在近年来优秀算法的基础上,我们从头开始设计了一个新颖的系统,它使用相同的特征来完成所有SLAM任务:跟踪、地图构建、重定位和闭环闭合。一种适者生存策略,选择重建的点和关键帧,带来了卓越的鲁棒性,并生成了一个紧凑且可追踪的地图,只有当场景内容变化时才会增长,允许终身运行。我们在最受欢迎的数据集中的27个序列上进行了详尽的评估。ORB-SLAM在与其他最先进的单目SLAM方法相比,实现了前所未有的性能。为了社区的利益,我们公开了源代码。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2016年Best Paper

-
论文标题:Rapidly Exploring Random Cycles: Persistent Estimation of Spatiotemporal Fields With Multiple Sensing Robots
-
作者:Xiaodong Lan, Mac Schwager
-
摘要
本文考虑了在动态环境中为单个和多个感知机器人规划轨迹的问题,以最佳估计一个时空场。机器人使用卡尔曼滤波器来维持对场值的估计,并计算估计的误差协方差矩阵。提出了两种新的基于采样的路径规划算法(快速扩展随机循环和改进的快速扩展随机循环),用于为感知机器人找到周期性轨迹,这些轨迹在无限时间范围内最小化误差协方差矩阵的最大特征值。算法被证明可以在随机图中找到最小无限时间范围成本循环,该图通过连续添加随机点而增长。算法利用最近开发的周期性Riccati递归方法来高效计算循环的无限时间范围成本,并且它们使用Riccati递归的单调性属性来高效比较不同循环的成本,而无需显式计算它们的成本。在一项使用国家海洋和大气管理局数据规划加勒比海感知轨迹的研究中展示了算法。在这种环境中,我们的算法显著优于随机、贪婪和递减视野方法。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2017年Best Paper
image
-
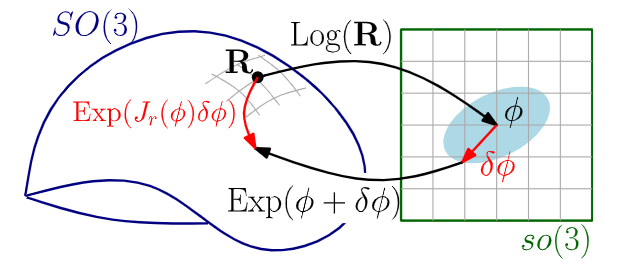
论文标题:On-Manifold Preintegration for Real-Time Visual--Inertial Odometry
-
作者:Christian Forster, Luca Carlone, Frank Dellaert, Davide Scaramuzza
-
摘要
当前用于视觉-惯性里程计(VIO)的方法能够通过非线性优化实现高精度的状态估计。然而,随着轨迹随时间增长,实时优化很快变得不可行;由于惯性测量以高频率进行,因此优化中的变量数量快速增长,这一问题进一步凸显。在本文中,我们通过将选定关键帧之间的惯性测量预积分为单个相对运动约束来解决这个问题。我们的第一个贡献是提出了一个预积分理论,该理论恰当地处理了旋转群的流形结构。我们正式讨论了生成性测量模型以及旋转噪声的性质,并推导出最大后验状态估计器的表达式。我们的理论发展使得优化和后验偏差校正所需的所有雅可比矩阵可以以解析形式计算。第二个贡献是展示了预积分惯性测量单元模型可以无缝集成到因子图统一框架下的视觉-惯性框架中。这使得可以应用增量平滑算法,并使用无结构模型进行视觉测量,避免了对3D点的优化,进一步加速了计算。我们在真实和模拟数据集上对我们的单目VIO进行了广泛的评估。结果证实,我们的建模工作实现了实时的准确状态估计,超越了最先进的方法。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2018年Best Paper
-
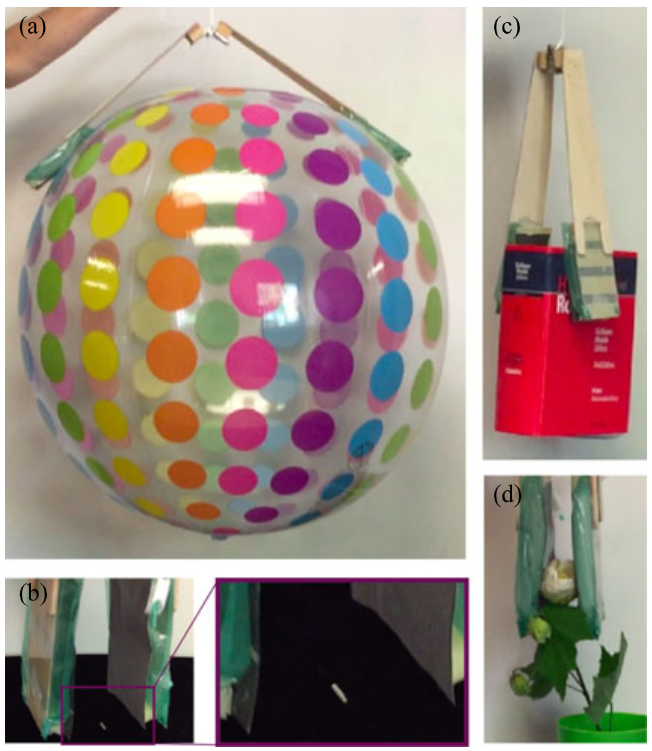
论文标题:Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers
-
作者:Elliot Wright Hawkes, Hao Jiang, David L. Christensen, Amy K. Han and Mark R. Cutkosky
-
摘要
抓取过大而无法包裹的物体传统上是通过挤压来激活摩擦力实现的。我们提出了一种剪切激活夹持器系列,可以在不需要挤压的情况下抓取此类物体。当剪切力作用于我们夹持器中受壁虎启发的材料时,粘附力就会被激活;这种粘附力进而产生粘附控制的摩擦力,这种摩擦力依赖于粘附力而不是挤压的法向力。移除剪切力会消除粘附力,从而轻松释放物体。一个没有主动传感和控制的柔性剪切激活夹持器可以使用相同的轻触来举起柔软的、易碎的、脆弱的、轻的或非常重的物体。我们展示了三种夹持器,前两种设计用于曲面物体,第三种用于几乎任何形状。简单的模型描述了抓取过程,并且经验结果验证了这些模型。夹持器在具有各种形状、材料、大小和重量的物体上进行了演示。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2019年Best Paper
-
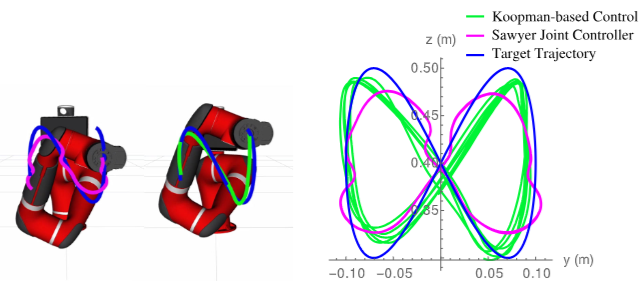
论文标题:Active Learning of Dynamics for Data-Driven Control Using Koopman Operators
-
作者:Ian Abraham and Todd D. Murphey
-
摘要
本文提出了一种考虑任务信息、能够快速学习并利用Koopman算子表示轻松综合控制的机器人系统的主动学习策略。我们首先通过展示具有驱动的Van der Pol系统的模型基控制性能的改进,来激发将非线性系统表示为线性Koopman算子系统的想法。然后,我们将信息论方法应用于动态系统的Koopman算子公式,从中我们推导出用于机器人动态主动学习的控制器。主动学习控制器被证明可以增加关于Koopman算子的信息率。此外,我们的主动学习控制器可以轻松地结合建立在Koopman动力学上的政策,从而实现快速主动学习和改进控制的好处。使用四旋翼飞行器的结果展示了在自由落体过程中的单次执行主动学习和稳定化能力。主动学习的结果被扩展为自动化Koopman可观测量,我们将我们的方法在真实机器人系统上实施。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2020年Best Paper

-
论文标题:TossingBot: Learning to Throw Arbitrary Objects With Residual Physics
-
作者:Andy Zeng, Shuran Song, Johnny Lee, Alberto Rodriguez and Thomas Funkhouser
-
摘要
我们研究机器人臂是否能够快速准确地学习拾取任意刚性物体并将其投掷到选定的盒子中。投掷有潜力增加机器人臂的物理可达性和拾取速度。然而,在非结构化环境中精确投掷任意物体面临着许多挑战:从获取适合可靠投掷的抓取方式,到处理变化的物体中心属性(例如,质量分布、摩擦、形状)和复杂的空气动力学。在这项工作中,我们提出了一个端到端的公式,该公式联合学习从视觉观察(箱子中任意物体的RGB-D图像)中推断抓取和投掷运动原语的控制参数,通过试错学习。在这个公式中,我们研究了抓取和投掷(即,学习使投掷更准确的抓取方式)之间的协同作用,以及模拟和深度学习(即,使用深度网络在物理模拟器预测的控制参数之上预测残差)之间的协同作用。由此产生的系统,TossingBot,能够抓取并成功将任意物体投掷到位于其最大可达范围之外的盒子中,平均每小时500多次拾取(每小时600多次抓取,投掷准确率85%);并且能够泛化到新物体和目标位置。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2022年Best Paper
-
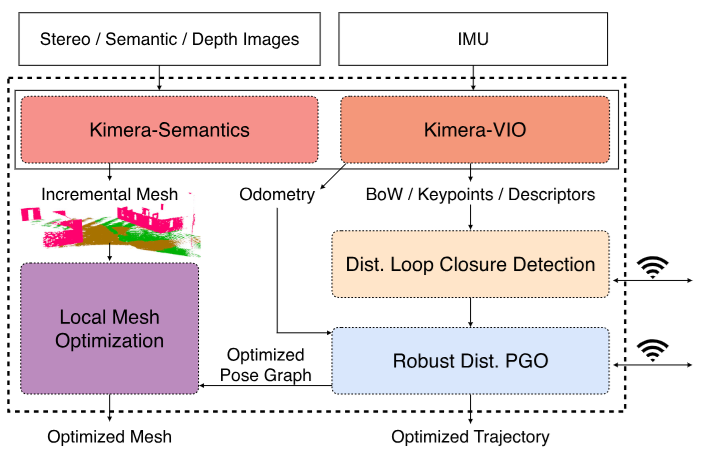
论文标题:Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems
-
作者:Yulun Tian; Yun Chang; Fernando Herrera Arias; Carlos Nieto-Granda; Jonathan P. How; Luca Carlone
-
摘要
多机器人同时定位与建图(SLAM)是获取大面积区域及时态势感知的关键能力。现实世界的应用要求多机器人SLAM系统对感知别名具有鲁棒性,并在有限的通信带宽下运行;此外,这些系统能够捕获语义信息以实现高级决策和空间人工智能是可取的。本文介绍了Kimera-Multi,这是一个多机器人系统,它:1)具有鲁棒性,能够识别并拒绝由感知别名引起的不正确的机器人间和机器人内循环闭合;2)完全分布式,仅依赖本地(点对点)通信来实现分布式定位和建图;3)实时构建全局一致的度量-语义3D网格模型,网格的面带有语义标签。Kimera-Multi由配备视觉-惯性传感器的机器人团队实现。每个机器人使用Kimera构建本地轨迹估计和本地网格。当通信可用时,机器人启动基于分布式渐进非凸算法的分布式地点识别和鲁棒姿态图优化协议。所提出的协议允许机器人利用机器人间的循环闭合来改进它们的本地轨迹估计,同时对异常值具有鲁棒性。最后,每个机器人使用其改进的轨迹估计来使用网格变形技术校正本地网格。我们在照片级逼真的模拟、SLAM基准数据集和使用地面机器人收集的具有挑战性的户外数据集上展示了Kimera-Multi。真实和模拟实验都涉及长轨迹(例如,每个机器人长达800米)。实验表明Kimera-Multi:1)在鲁棒性和准确性方面超越了最先进的技术;2)实现了与集中式SLAM系统相当的估计误差,同时完全分布式;3)在通信带宽方面非常节省;4)产生了准确的度量-语义3D网格;5)是模块化的,也可以用于标准的3D重建(即,没有语义标签)或轨迹估计(即,不重建3D网格)。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
2023年Best Paper

-
论文标题:RACER: Rapid Collaborative Exploration with a Decentralized Multi-UAV System
-
作者:Boyu Zhou, Hao Xu, and Shaojie Shen
-
摘要
虽然使用多个无人机(UAV)进行快速自主探索具有巨大潜力,但这一领域却鲜少受到关注。在本文中,我们提出了一种使用一组分散式无人机的快速协作探索(RACER)方法。为了有效地调度无人机,我们使用了基于在线hgrid space 分解的成对交互。它确保所有无人机同时探索不同的区域,仅使用异步和有限的通信。此外,我们通过有容量的车辆路径问题公式优化未知空间的覆盖路径,并平衡分配给每个无人机的工作负载。在给定任务分配的情况下,每个无人机不断更新覆盖路径,并逐步提取关键信息以支持探索规划。分层规划器依次找到探索路径,细化局部视点,并生成最小时间轨迹,以灵活安全地探索未知空间。所提出的方法经过广泛评估,显示出高探索效率、可扩展性和对有限通信的鲁棒性。此外,我们首次在现实世界中实现了多个无人机的完全分散式协作探索。我们将发布我们的实现作为开源包。
关注公众号:智驾机器人技术前线,后台回复“TRO最佳论文”,
即可获取所有论文pdf
参考资料
https://www.ieee-ras.org/awards-recognition/publications-awards?view=article&id=70:ieee-transactions-on-robotics-king-sun-fu-memorial-best-paper-award&catid=69:society-awards









![【YOLOv8改进[SPPF]】使用SPPFCSPC替换SPPF模块 + 含全部代码和详细修改方式](https://i-blog.csdnimg.cn/direct/a58699cd1f6e4387a04f302718bf4626.png)





![[Linux]僵尸进程,孤儿进程,环境变量](https://i-blog.csdnimg.cn/direct/f352ebe0c5214ba68728660e02f5fb89.png)

