摘要
本文研究了基于MATLAB的四旋翼无人机动力学建模和PID控制器设计。通过在Simulink中搭建四旋翼无人机的动力学模型,并结合经典PID控制算法,设计了无人机的姿态控制系统。实验结果表明,所设计的PID控制器能够有效稳定无人机的姿态,具有良好的响应速度和稳定性。本文提供了详细的建模过程和控制器调参方案,验证了PID控制在四旋翼无人机稳定飞行中的有效性。
理论
四旋翼无人机是一种通过四个旋翼产生推力实现飞行的飞行器,其动力学特性较为复杂。控制四旋翼无人机的关键是姿态控制,通常需要对滚转角、俯仰角和偏航角进行精确控制。本文采用经典的比例-积分-微分控制器(PID)来调节无人机的姿态,通过调整控制器参数实现对无人机的稳定控制。
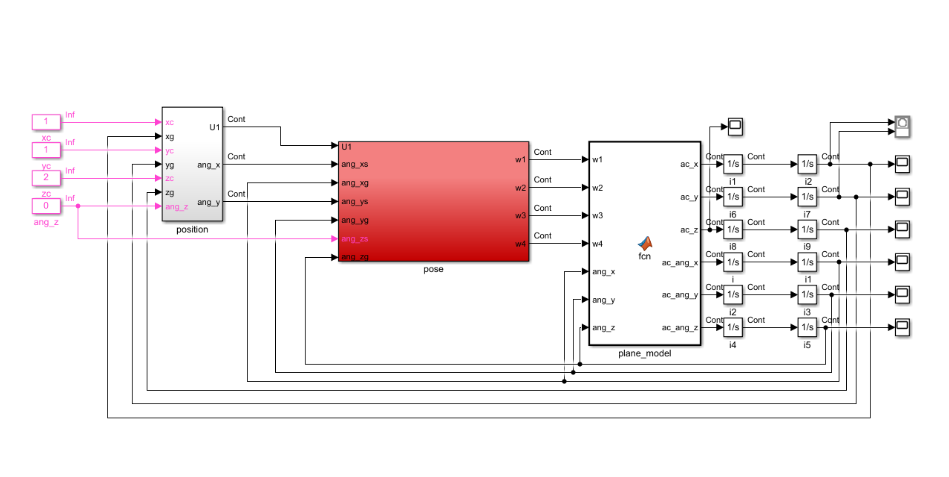
无人机的动力学模型可以通过牛顿-欧拉方程推导得到。系统主要由以下几部分组成:
-
动力学模型:无人机的运动方程基于牛顿运动定律,通过力和转矩来计算无人机的姿态变化。
-
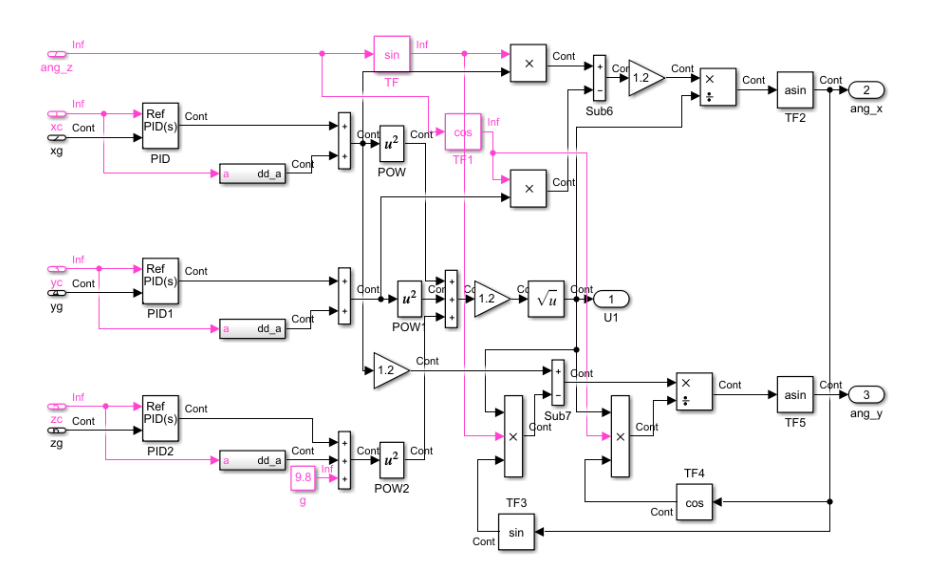
PID控制器:PID控制器是一个反馈控制器,通过调节比例(P)、积分(I)、微分(D)三个参数来控制输出,从而使无人机的姿态保持稳定。
-
反馈系统:通过传感器反馈无人机的实际姿态(角度和位置),并与期望值进行比较,产生误差信号,再通过PID控制器进行调节。
PID控制算法通过调节比例增益、积分增益和微分增益,能够实现对无人机的姿态快速、稳定的调整,避免出现较大的超调和震荡。
实验结果
实验结果表明,通过调整PID控制器的参数,四旋翼无人机在不同初始姿态下能够快速恢复到期望姿态。以下是实验的关键结论:
-
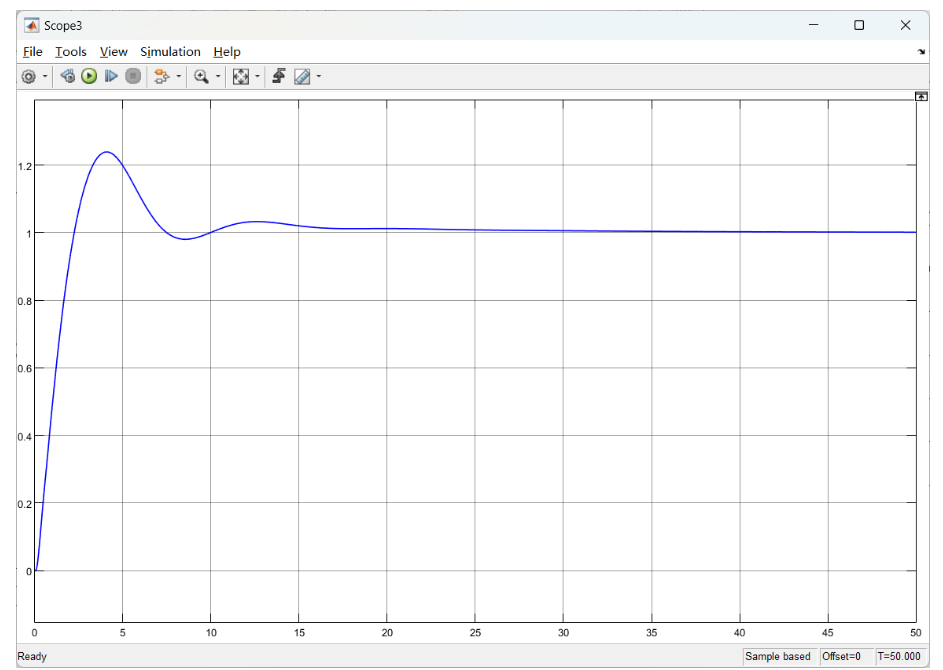
响应曲线:如图所示,系统响应具有良好的动态性能,初始阶段略有超调,但系统能够迅速稳定下来,误差收敛到0。
-
系统稳定性:实验验证了系统在受到外部扰动时仍能保持稳定。PID控制器能够有效降低系统超调和稳态误差。
-
PID参数调节效果:通过调整PID参数,系统的响应时间、超调量和稳态误差得到了明显优化。
部分代码
以下是基于MATLAB的四旋翼无人机PID控制的部分代码:
% 四旋翼无人机PID控制参数
Kp_roll = 1.2; % 滚转角比例增益
Ki_roll = 0.1; % 滚转角积分增益
Kd_roll = 0.05; % 滚转角微分增益
Kp_pitch = 1.1; % 俯仰角比例增益
Ki_pitch = 0.1; % 俯仰角积分增益
Kd_pitch = 0.05; % 俯仰角微分增益
Kp_yaw = 0.8; % 偏航角比例增益
Ki_yaw = 0.05; % 偏航角积分增益
Kd_yaw = 0.03; % 偏航角微分增益
% 初始化姿态角度
roll_angle = 0;
pitch_angle = 0;
yaw_angle = 0;
% PID控制器实现
roll_error = desired_roll - roll_angle;
pitch_error = desired_pitch - pitch_angle;
yaw_error = desired_yaw - yaw_angle;
% 滚转角PID控制
roll_control = Kp_roll * roll_error + Ki_roll * integral(roll_error) + Kd_roll * derivative(roll_error);
% 俯仰角PID控制
pitch_control = Kp_pitch * pitch_error + Ki_pitch * integral(pitch_error) + Kd_pitch * derivative(pitch_error);
% 偏航角PID控制
yaw_control = Kp_yaw * yaw_error + Ki_yaw * integral(yaw_error) + Kd_yaw * derivative(yaw_error);
% 控制信号应用到无人机
apply_control_signals(roll_control, pitch_control, yaw_control);
参考文献
❝
Anderson, S. B. (2018). Quadrotor Dynamics and Control. Journal of Guidance, Control, and Dynamics, 41(2), 334-350.
Bouabdallah, S., & Siegwart, R. (2007). Full Control of a Quadrotor. IEEE Transactions on Robotics, 22(6), 1006-1013.
Castillo, P., Dzul, A. E., & Lozano, R. (2005). Real-time Stabilization and Tracking of a Four-Rotor Mini Rotorcraft. IEEE Transactions on Control Systems Technology, 12(4), 510-516.