之前已经讲解了TECS高度与速度控制器,今天是PX4固定翼控制器系列讲解的最后一期,主题是PX4的位置控制器。PX4 1.12及其之前的版本,使用的位置控制器为L1控制器。1.13及其之后的版本,PX4更新了NPFG控制器。NPFG控制器在较强风速下有着更好的路径跟踪效果,且解决了风速大于空速情况下,可能导致飞机失控的问题。本文将简单介绍L1控制器,着重介绍NPFG控制器。
引言——L1控制器
首先简单介绍一下L1控制器,该控制器[1]由MIT的人员提出。
核心思想方法:
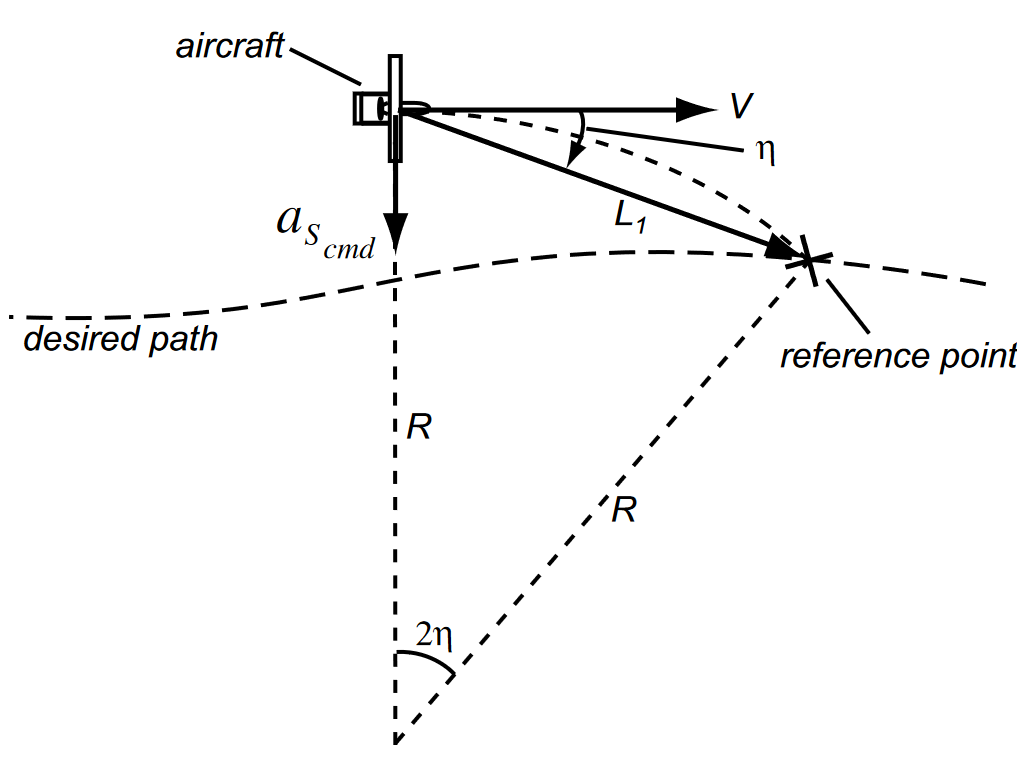
- 选择参考点:首先在期望路径上选择一个参考点,该参考点位于飞机当前位置的前方一定距离处(距离为L1)。
- 计算横向加速度期望指令:基于选定的参考点,控制算法生成一个横向加速度命令 a s c m d {a_s}_{cmd} ascmd,使飞机的速度方向逐渐对齐到参考点所在的路径方向。这一加速度命令考虑了飞机的惯性速度,并根据飞机当前位置与参考点之间的相对角度计算。
相关公式计算为:
{
a
s
c
m
d
=
2
V
2
L
1
s
i
n
η
L
1
=
2
R
s
i
n
η
\begin{cases} {a_s}_{cmd} = 2 \frac{V^2}{L_1}sin{\eta} \\ L_1 = 2Rsin{\eta} \\ \end{cases}
{ascmd=2L1V2sinηL1=2Rsinη
滚转指令生成
回看系列第二期文章中的讲解,根据侧向期望加速度,可以根据几何方法计算的得到期望滚转角。
{
L
c
o
s
ϕ
=
m
g
L
s
i
n
ϕ
=
m
a
s
c
m
d
\begin{cases} Lcos\phi = mg \\ Lsin\phi = m{a_s}_{cmd} \\ \end{cases}
{Lcosϕ=mgLsinϕ=mascmd
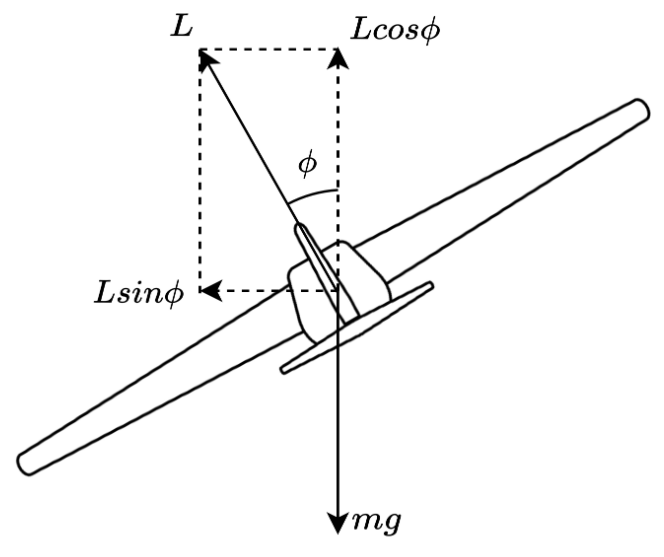
最终可以得到期望滚转角为 ϕ s p = a r c t a n ( a s c m d / g ) \phi_{sp}=arctan({a_s}_{cmd}/g) ϕsp=arctan(ascmd/g)
关键特性:
- 比例-微分控制:对于直线路径,控制律近似为传统的比例-微分(PD)控制器,但对于曲线路径,它包含了前馈控制元素,使得无人机能够紧密跟随复杂的曲线路径。
- 前馈控制:控制方法中加入了前馈控制元素,这使得在飞机接近曲线路径时能够提前调整飞行方向,减少路径误差。
- 自适应速度调整:算法使用飞机的惯性速度来计算横向加速度命令,这使得控制系统能够适应由于外界扰动(如风)引起的速度变化,从而提高轨迹跟踪的准确性。
其他详细推导讲解可以查看文末参考文献[1]。
PX4软件适配
在PX4软件中,有两个主要调节的参数为FW_L1_PERIOD和FW_L1_DAMPING。我们查看一下PX4关于L1的代码,位置PX4-Autopilot-main/src/lib/l1/ECL_L1_Pos_Controller.cpp。
代码最末尾的函数规定了几个过程变量的计算方式:
{
L
1
r
a
t
i
o
=
1
π
∗
L
1
d
∗
L
1
p
ω
h
e
a
d
i
n
g
=
2
∗
π
L
1
p
\begin{cases} {L_1}_{ratio} = \frac{1}{\pi}*{L_1}_d*{L_1}_p \\ \omega_{heading} = \frac{\sqrt2*\pi}{{L_1}_p} \\ \end{cases}
{L1ratio=π1∗L1d∗L1pωheading=L1p2∗π
void ECL_L1_Pos_Controller::set_l1_period(float period)
{
_L1_period = period;
/* calculate the ratio introduced in [2] */
_L1_ratio = 1.0f / M_PI_F * _L1_damping * _L1_period;
/* calculate normalized frequency for heading tracking */
_heading_omega = sqrtf(2.0f) * M_PI_F / _L1_period;
}
void ECL_L1_Pos_Controller::set_l1_damping(float damping)
{
_L1_damping = damping;
/* calculate the ratio introduced in [2] */
_L1_ratio = 1.0f / M_PI_F * _L1_damping * _L1_period;
/* calculate the L1 gain (following [2]) */
_K_L1 = 4.0f * _L1_damping * _L1_damping;
}
主要定义了三种模式下的L1_distance和lateral_accelation的计算方式。
- navigate_waypoints模式:查看文件中ECL_L1_Pos_Controller::navigate_waypoints函数。相关计算方式为
_L1_distance = _L1_ratio * ground_speed;
_lateral_accel = _K_L1 * ground_speed * ground_speed / _L1_distance * sinf(eta);
由此可以得到L1_distance和lateral_accelation的计算公式如下:
{
L
1
d
i
s
t
a
n
c
e
=
1
π
∗
L
1
d
∗
L
1
p
∗
V
g
r
o
u
n
d
a
s
c
m
d
=
4
L
1
2
d
V
g
r
o
u
n
d
2
L
1
d
i
a
t
a
n
c
e
s
i
n
η
\begin{cases} {L_1}_{distance} = \frac{1}{\pi}*{L_1}_d*{L_1}_p*V_{ground} \\ {a_s}_{cmd} = \frac{4{{L^2_1}_d} V^2_{ground}}{{L_1}_{diatance}}sin{\eta} \\ \end{cases}
{L1distance=π1∗L1d∗L1p∗Vgroundascmd=L1diatance4L12dVground2sinη
需要注意的是这里L1的取法和论文中的原版不一致。想要读懂这段代码的逻辑可能会有些复杂,这里我查到了AP中的L1控制器的图解,和PX4中所给出的计算逻辑一致。如下图所示。两者的计算方式也基本一致。
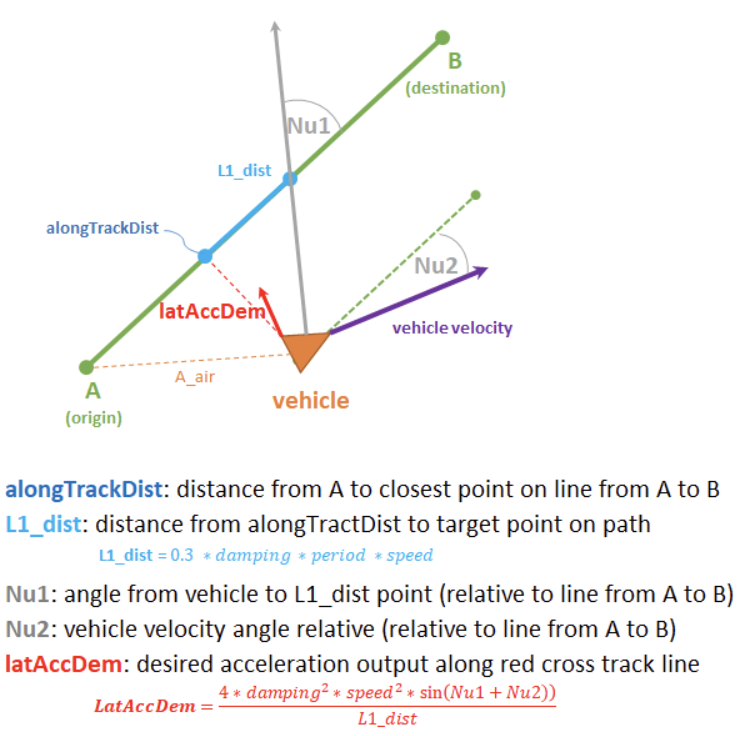
由此可以看出,调试period和damping这两个参数时,先调节period,控制参考点的距离在一个大致合理的范围。随后调节damping来微调震荡情况。可以先调节period到稍微振荡,再将period适当增大2-3;最后微调damping。damping取值范围为0.65-0.85,每次微调变化幅度为0.05。
- navigate_loiter模式:该模式为盘旋模式,内部分了两种情况。
Capture模式:该模式用于当飞机在圆圈外的飞行控制。在飞机与圆心的连线上选取参考点,使用L1控制器。
_L1_distance = _L1_ratio * ground_speed;
float lateral_accel_sp_center = _K_L1 * ground_speed * ground_speed / _L1_distance * sinf(eta);
Circle模式:当飞机跟踪到圆圈附近时,不再使用L1控制器,改为使用PD控制器加向心加速度前馈。
PD控制:
float xtrack_vel_circle = -ltrack_vel_center;
float xtrack_err_circle = vector_A_to_airplane.length() - radius;
float lateral_accel_sp_circle_pd = (xtrack_err_circle * K_crosstrack + xtrack_vel_circle * K_velocity);
向心加速度前馈:
float tangent_vel = xtrack_vel_center * loiter_direction;
float lateral_accel_sp_circle_centripetal = tangent_vel * tangent_vel / math::max((0.5f * radius), (radius + xtrack_err_circle));
两者叠加:
float lateral_accel_sp_circle = loiter_direction * (lateral_accel_sp_circle_pd + lateral_accel_sp_circle_centripetal);
- navigate_heading模式:该模式用于定向飞行。代码中相关量计算方式为
{ a s c m d = 2 s i n η ω v L 1 d i s t a n c e = V g r o u n d / ω h e a d i n g ω v = V g r o u n d ω h e a d i n g ω h e a d i n g = 2 π / L 1 p \begin{cases} {a_s}_{cmd} = 2\ sin{\eta} \ \omega_v \\ {L_1}_{distance} = V_{ground}/ \omega_{heading}\\ \omega_v = V_{ground} \ \omega_{heading} \\ \omega_{heading} = \sqrt{2} \pi/{L_1}_p \\ \end{cases} ⎩ ⎨ ⎧ascmd=2 sinη ωvL1distance=Vground/ωheadingωv=Vground ωheadingωheading=2π/L1p
给出
L
1
d
i
s
t
a
n
c
e
{L_1}_{distance}
L1distance和
a
s
c
m
d
{a_s}_{cmd}
ascmd的计算方式为
{
a
s
c
m
d
=
2
2
π
s
i
n
η
V
g
r
o
u
n
d
/
L
1
p
=
2
V
g
r
o
u
n
d
2
L
1
d
i
s
t
a
n
c
e
s
i
n
η
L
1
d
i
s
t
a
n
c
e
=
V
g
r
o
u
n
d
L
1
p
2
π
\begin{cases} {a_s}_{cmd} = 2\sqrt{2}\pi\ sin{\eta} \ V_{ground}/{L_1}_p \\ \qquad \ \ = 2\frac{V^2_{ground}}{{L_1}_{distance}}sin\eta\\ {L_1}_{distance} = \frac{V_{ground} {L_1}_p}{\sqrt{2}\pi}\\ \end{cases}
⎩
⎨
⎧ascmd=22π sinη Vground/L1p =2L1distanceVground2sinηL1distance=2πVgroundL1p
小结
综上介绍了L1制导律在PX4中的应用。L1_PERIOD主要决定参考距离的长短,值越大参考距离越大,转弯越缓慢;值越小,参考距离越小,转弯越陡;L1_DAMPING则是微调转弯时候的期望加速度 a s c m d {a_s}_{cmd} ascmd。在调试这两个参数时,先调试period,period越小,转弯越快。当飞机转弯出现些许震荡后,将period适当增大2-3。随后调整damping。
NPFG控制器
在PX41.13及其之后的版本,可以使用NPFG位置控制器,全称Nonlinear Path Following Guidance(非线性路径跟踪制导律)[2]。L1控制器在计算参考方向、参考距离、侧向加速度指令时,大都采用地速作为参考,没有引入空速的闭环控制,因此L1控制器在强风天气下的路径跟踪控制效果较差。NPFG相较于L1,引入了新的期望空速矢量,来抵御强风的干扰,其路径跟踪效果相较于L1有着显著提升。接下来我们来介绍NPFG控制器。英文网站参考链接[3]。
空速圆
如下图所示,我们橙色矢量为空速矢量 V a V_a Va。以飞机起始位置,作风速矢量平移后得到灰色的飞机位置,以灰色飞机位置为圆心,空速大小为半径做圆得到空速圆(橙色虚线圆)。空速圆为空速矢量 V a V_a Va可到达的最大范围,蓝色矢量为风速矢量 V w V_w Vw,空速矢量与风速矢量合成可得到白色矢量地速 V g V_g Vg。
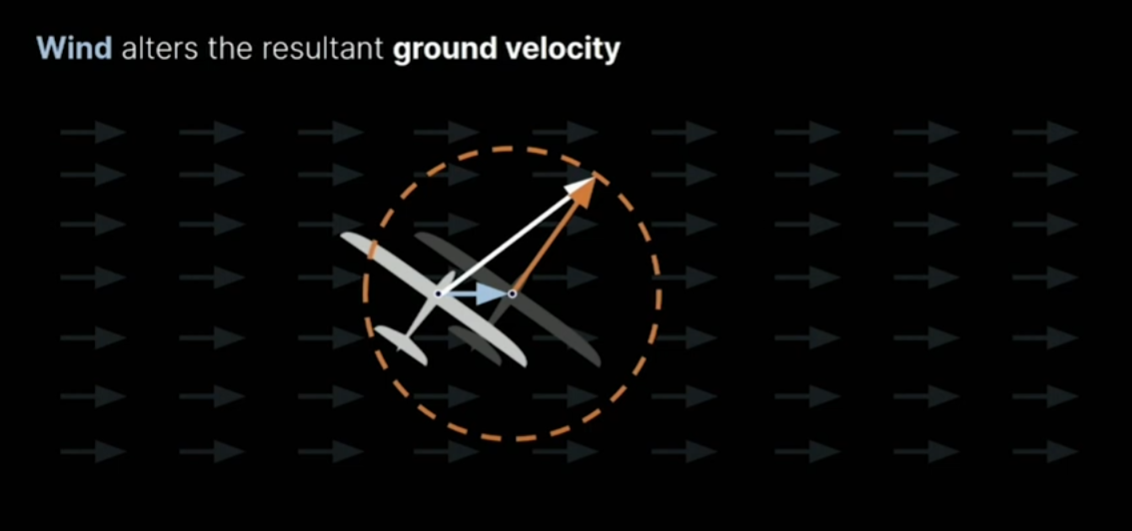
当风速大小 ∣ V w ∣ |V_w| ∣Vw∣小于空速大小 ∣ V a ∣ |V_a| ∣Va∣时,飞机位置位于空速圆内,合成后的 V g V_g Vg可以指向任意方向。
超出空速圆
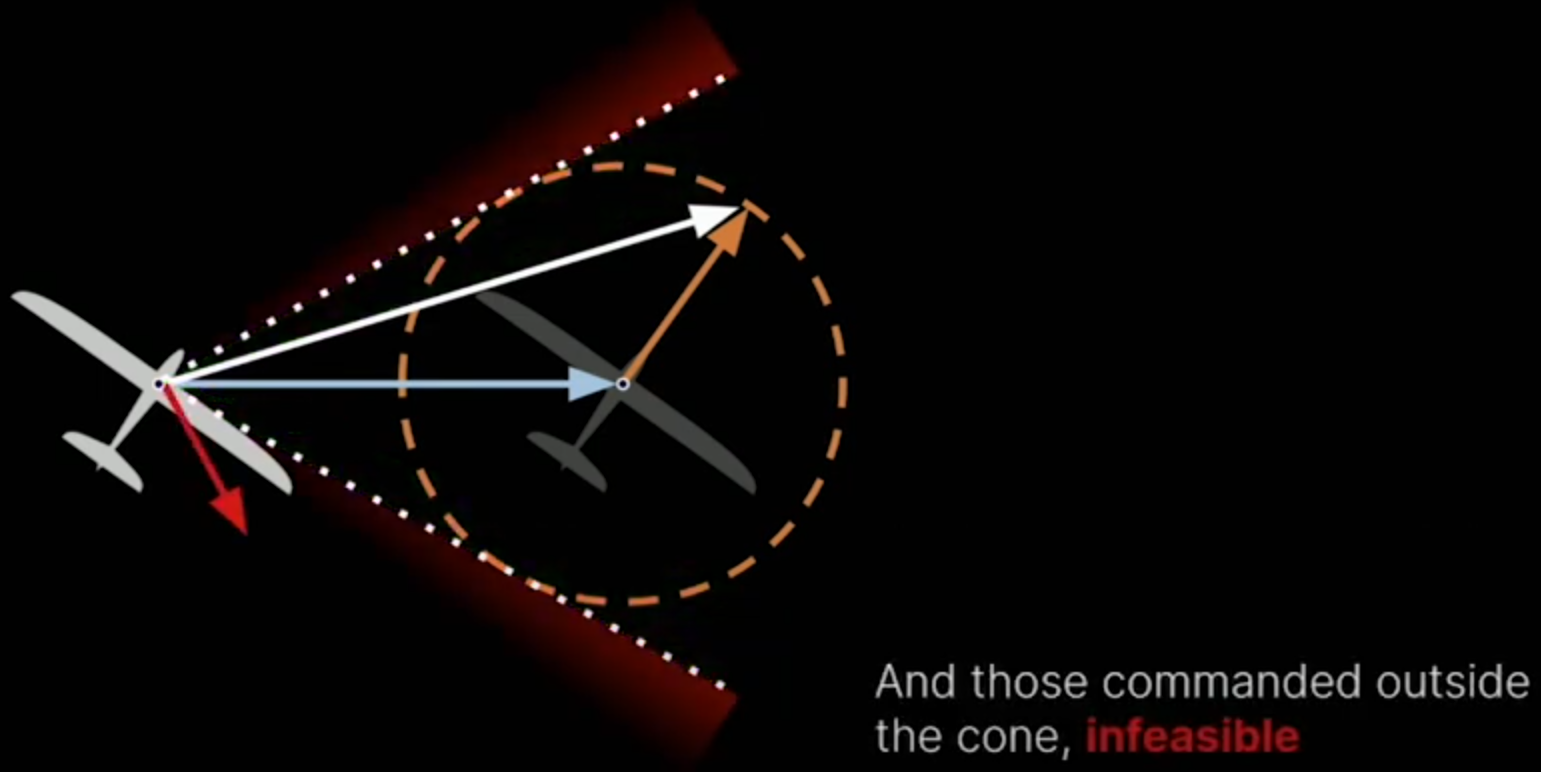
如下图所示,当风速较大时,出现”过量风“ ∣ V w ∣ > ∣ V a ∣ |V_w|>|V_a| ∣Vw∣>∣Va∣时,无论空速矢量和风速矢量如何合成,合成后的地速矢量永远在一个锥形区域内,称之为可行方向锥。
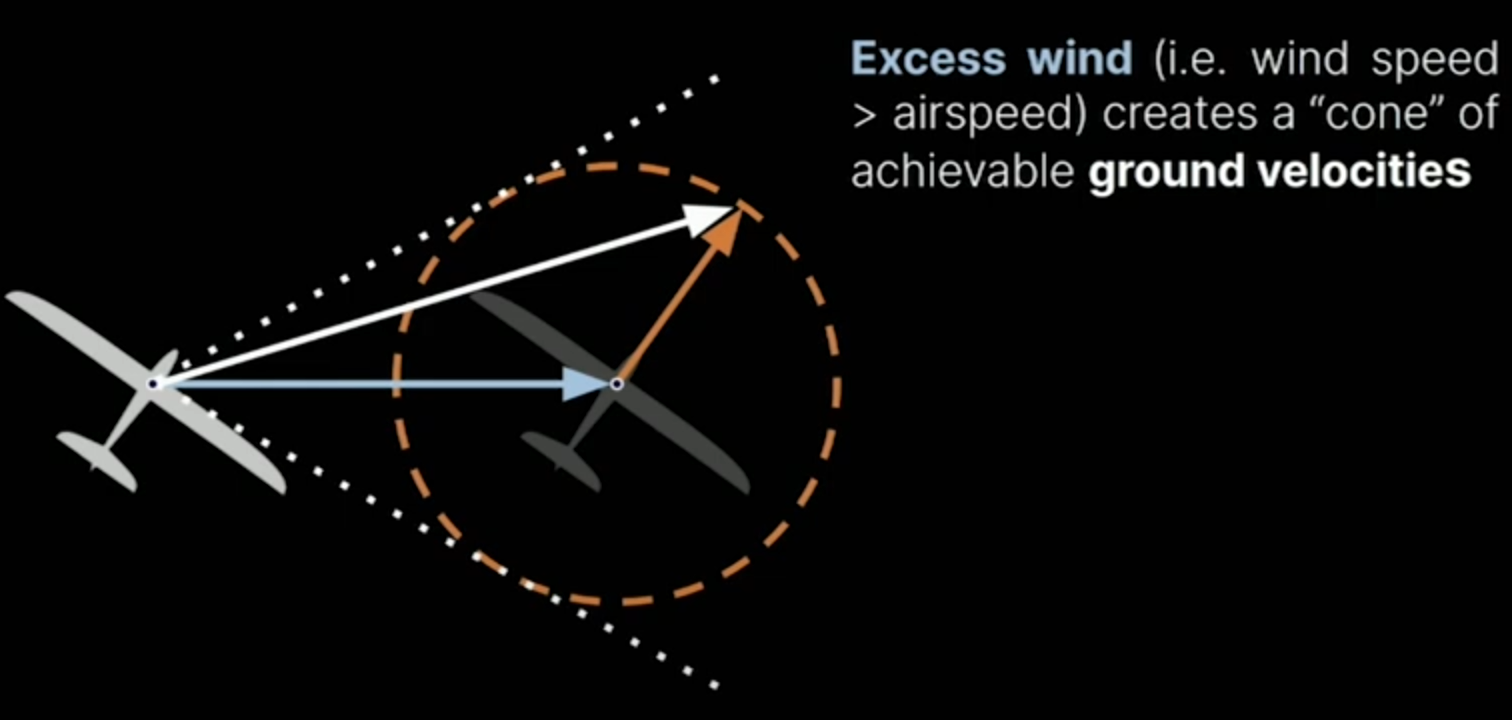
因此锥内的范围是可飞行方向。
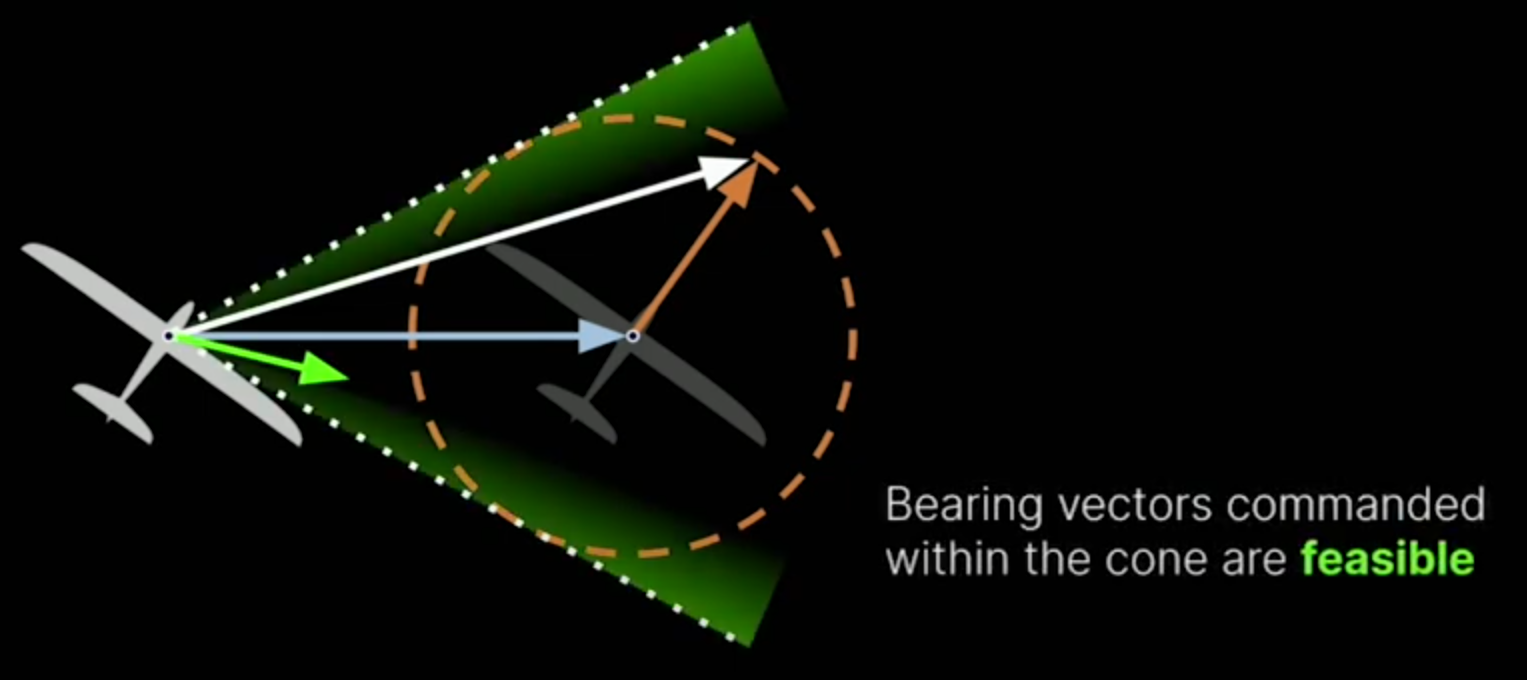
锥外的范围是不可飞行方向。
空速圆内、可视范围内路径跟踪
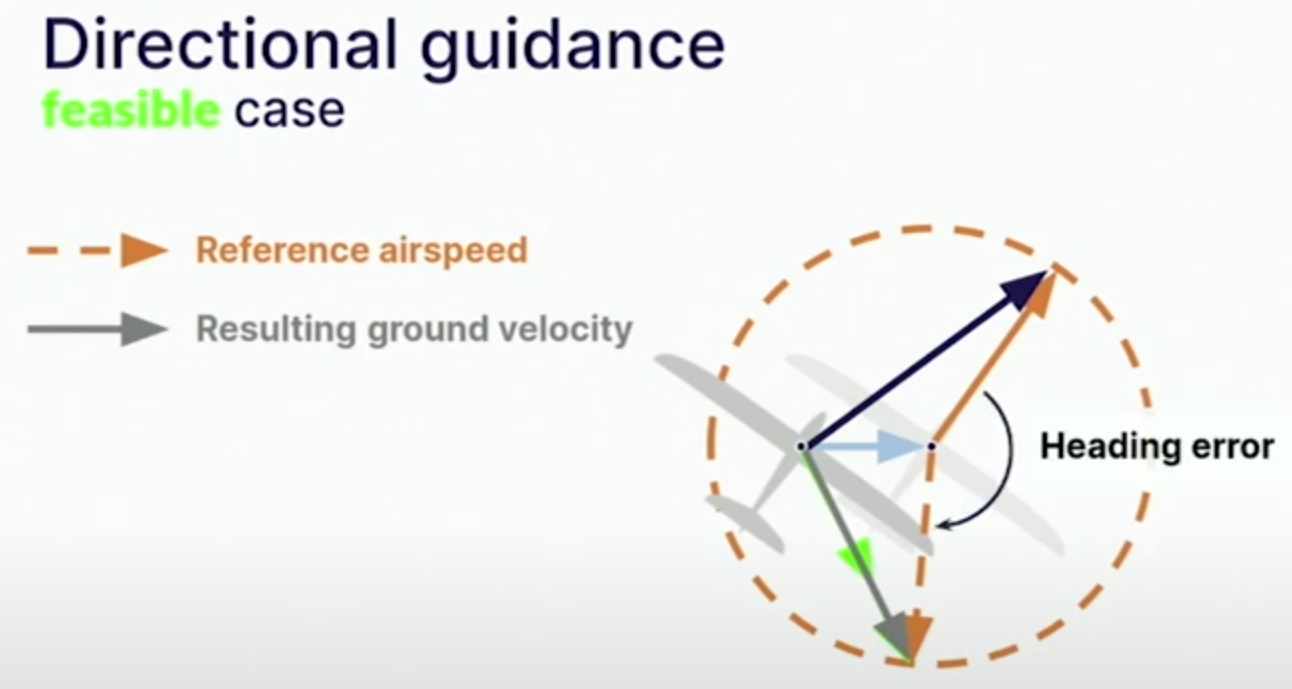
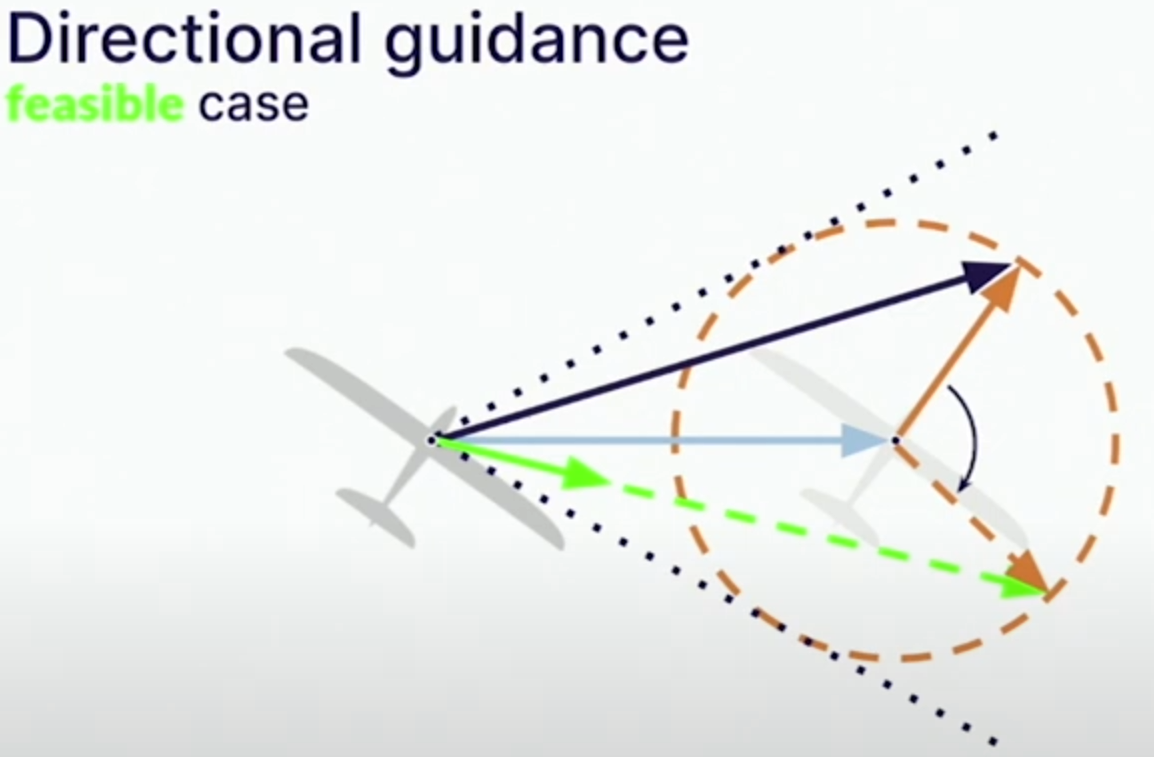
当 ∣ V w ∣ < ∣ V a ∣ |V_w|<|V_a| ∣Vw∣<∣Va∣飞机位于空速圆内时,飞机跟踪蓝色期望路径,绿色为期望飞行方向(相对于地面)(选取方法类似L1控制器,在与期望路径最近点初,向前一段选取期望路径点,期望路径点与飞机连线为期望飞行方向)。
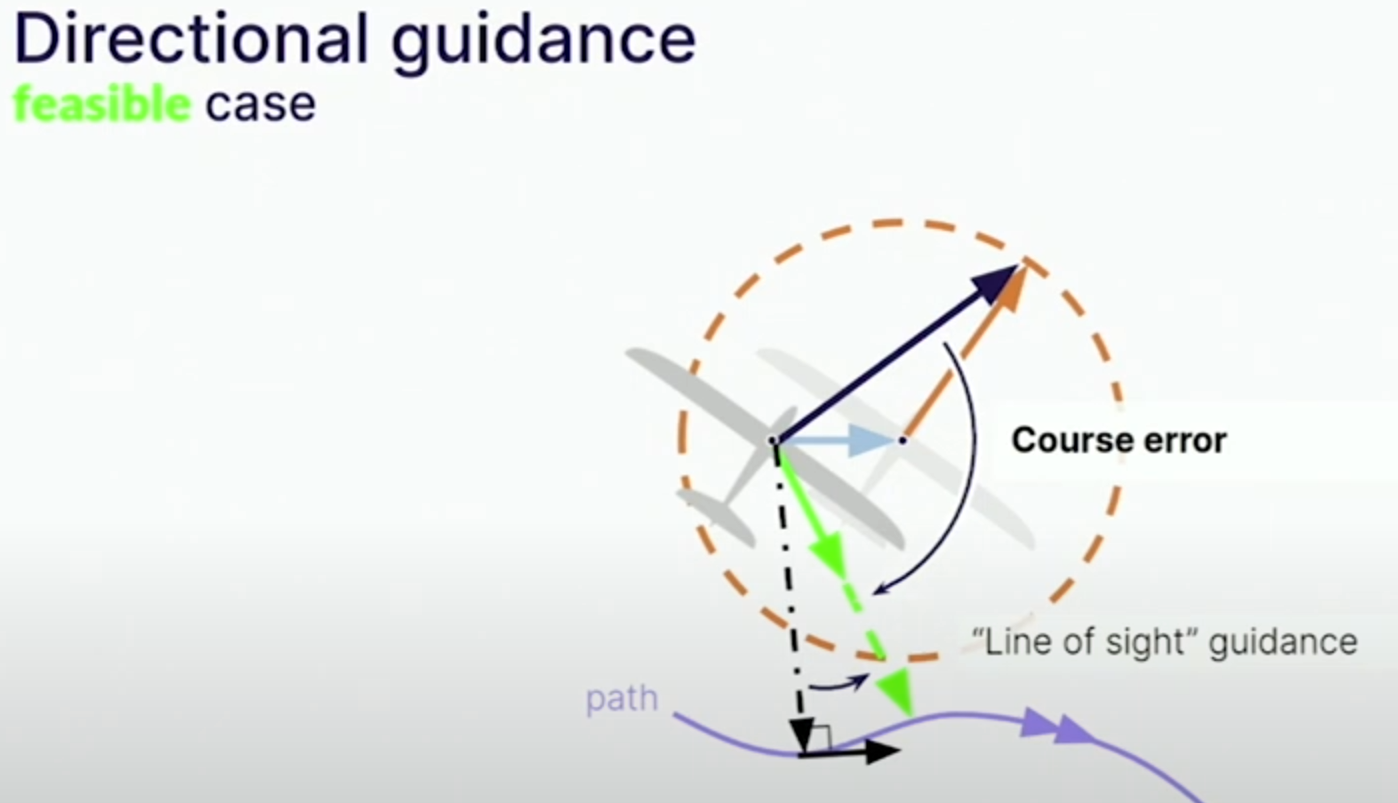
有了期望的飞行方向(相对于地面)后,将绿色矢量与空速圆的交点和空速圆圆心连接,即可得到期望的参考空速矢量(橙色虚线)。空速矢量与速度矢量合成后,得到灰色的地速矢量结果。在整个动态飞行过程中,计算是连续的。
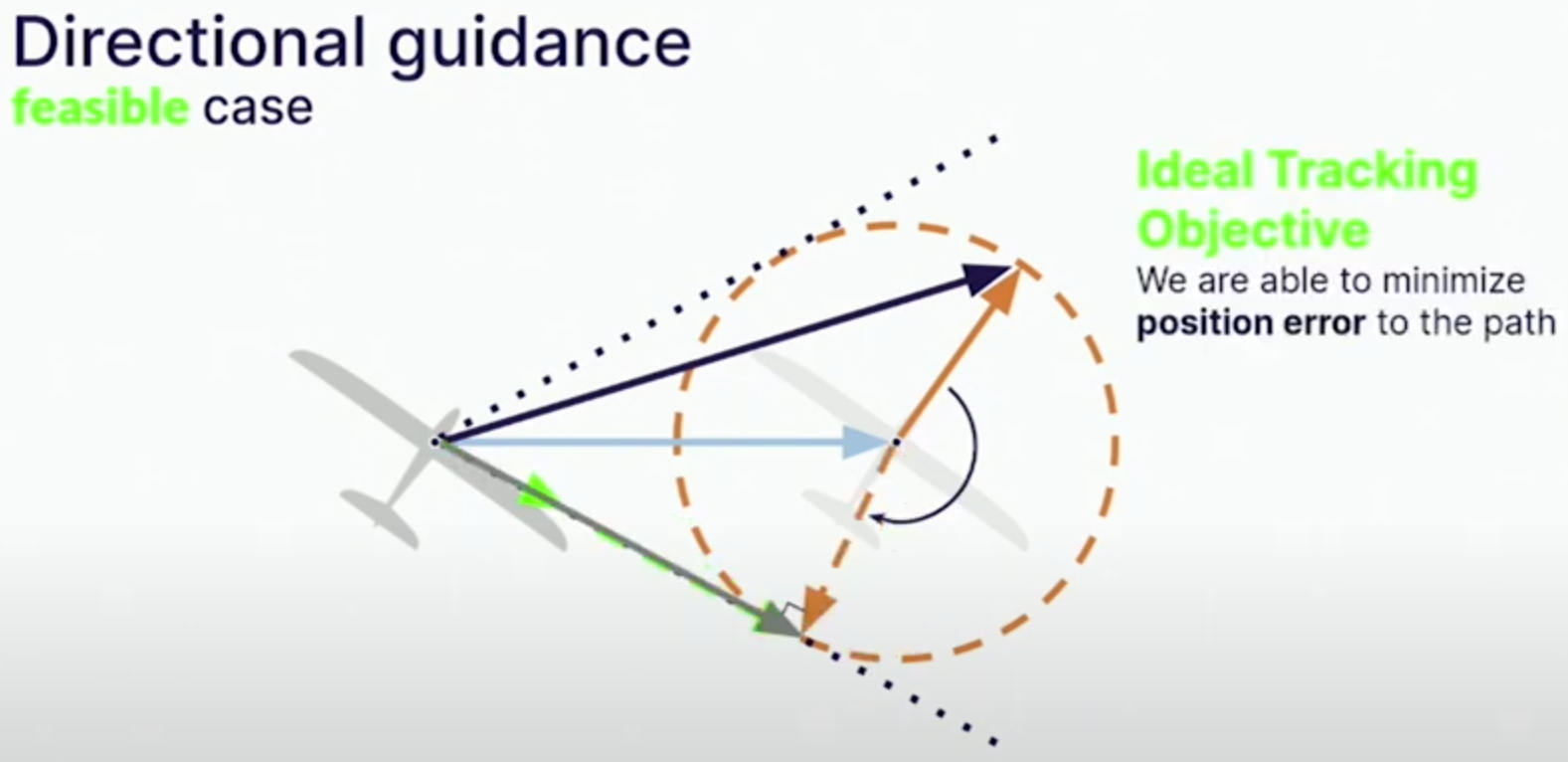
空速圆外、可行方向锥内路径跟踪
当 ∣ V w ∣ > ∣ V a ∣ |V_w|>|V_a| ∣Vw∣>∣Va∣飞机位于空速圆外时,如果期望的飞行方向(绿色矢量)位于可行方向锥内,任意方向均可通过空速矢量和风速矢量合成。
极限条件为:期望飞行方向与可行方向锥相切。这种情况下保证最小化到期望路径的位置误差。
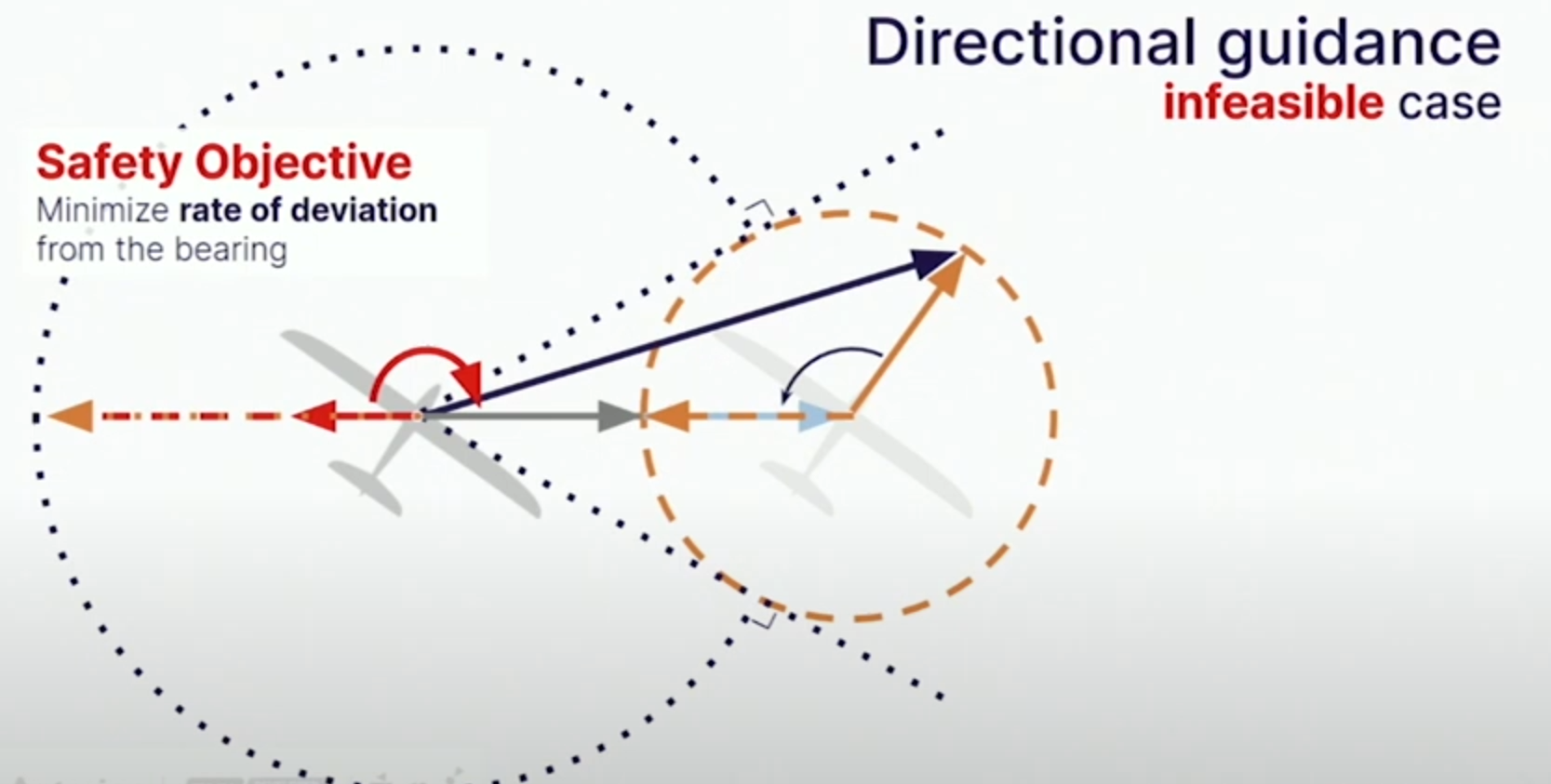
空速圆外、可行方向锥外路径跟踪
当 ∣ V w ∣ > ∣ V a ∣ |V_w|>|V_a| ∣Vw∣>∣Va∣飞机位于空速圆外,且期望的飞行方向(绿色矢量)位于可行方向锥外,无论怎样合成空速矢量和风速矢量,均无法到达期望方向。
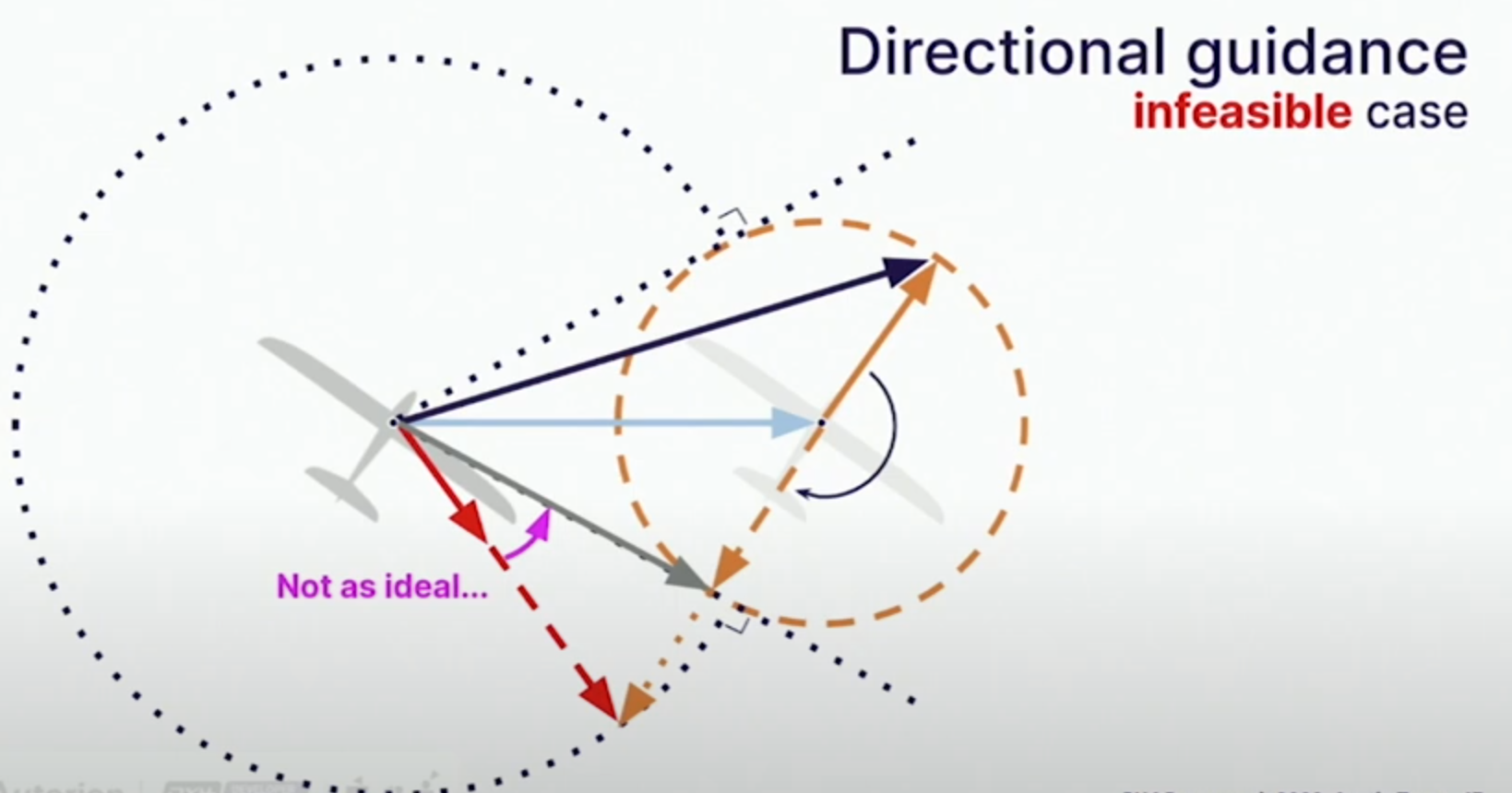
为了防止强风下失控,这里的安全机制设计为:将偏离航向的发生率降至最低。飞机空速方向与风速方向相反,飞机顶风飞行。但由于风速大于空速,飞机顶着风也会被向后”吹跑“。
空速补偿
根据上面的讲解不难看出,飞行范围主要取决于可行方向锥的范围,那我们是否可以尝试扩大可向方向锥的范围来实现更大范围的飞行?
之前的橙色空速圆为设定的默认空速值,实际上飞机还有可用的最大空速值。对于默认空速值可行方向锥范围外的飞行方向,可以尝试增大空速来获取更大的可行方向锥。
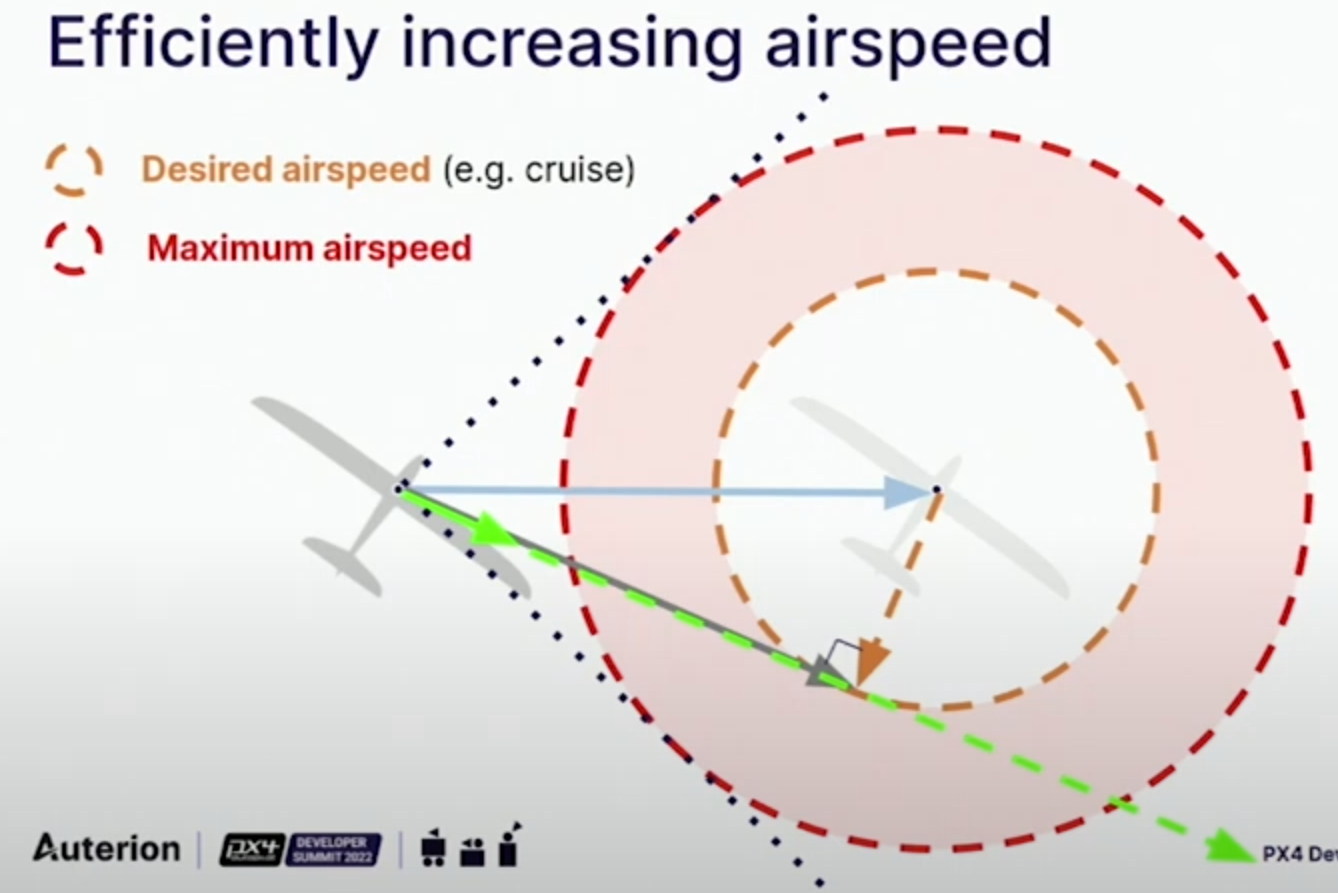
若期望飞行方向(绿色矢量),与橙色空速圆(设定的默认空速)无交点,与红色空速圆(最大空速圆)有交点。
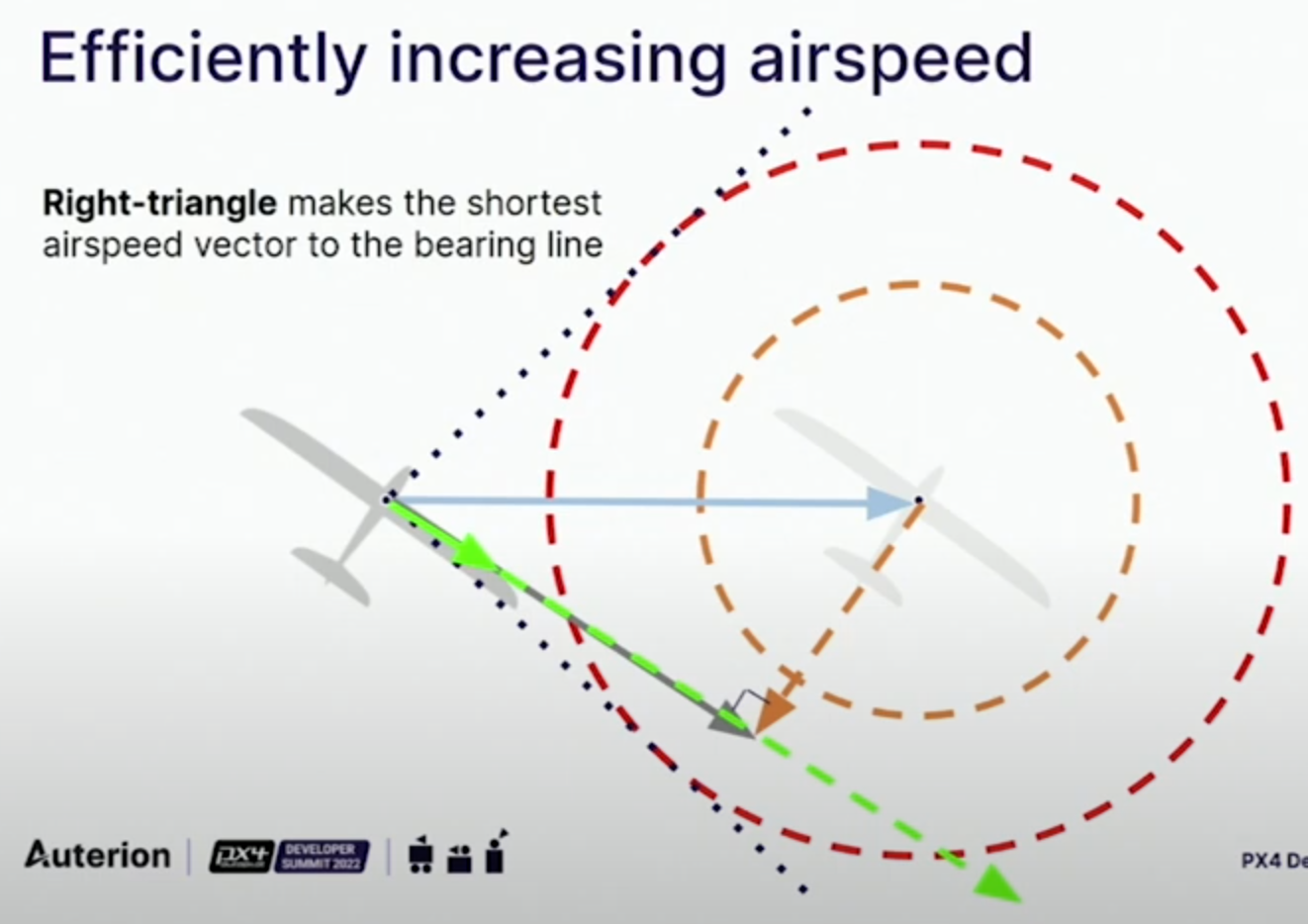
在绿色线上选取圆环内一点,将该点与圆心相连,即可得到期望的空速矢量,空速矢量与风速矢量合成,即可得到灰色地速矢量。这里选取图中飞机位置与垂线外侧的那一部分的点,可以获得较大的地速。
总结
根据上述分析,可以查看以下GIF图。图中总结了如何根据期望飞行方向选择空速方向,并说明了在何种情况下需要启用空速补偿以实现更佳的飞行效果。在开启空速补偿后,即便是在强风情况下,可行方向有着显著改善。

使用教程
开启方式
如果希望启用NPFG,需要以下条件:
- PX4 1.13及其以上版本
- 仅针对固定翼飞行器有效;
- 设置参数FW_USE_NPFG=1;
- 有效的风速估计
- 使用空速计;
- 并/或启用合成侧滑融合 EKF2_FUSE_BETA=1。
调参
NPFG主要改进在于期望空速矢量的选取,该控制器是由L1派生而来,因此NPFG_PERIOD和NPFG_DAMPING可以直接沿用L1_PERIOD和L1_DAMPING的值。越小的NPFG_PERIOD会带来越激进的转弯效果。
自动稳定
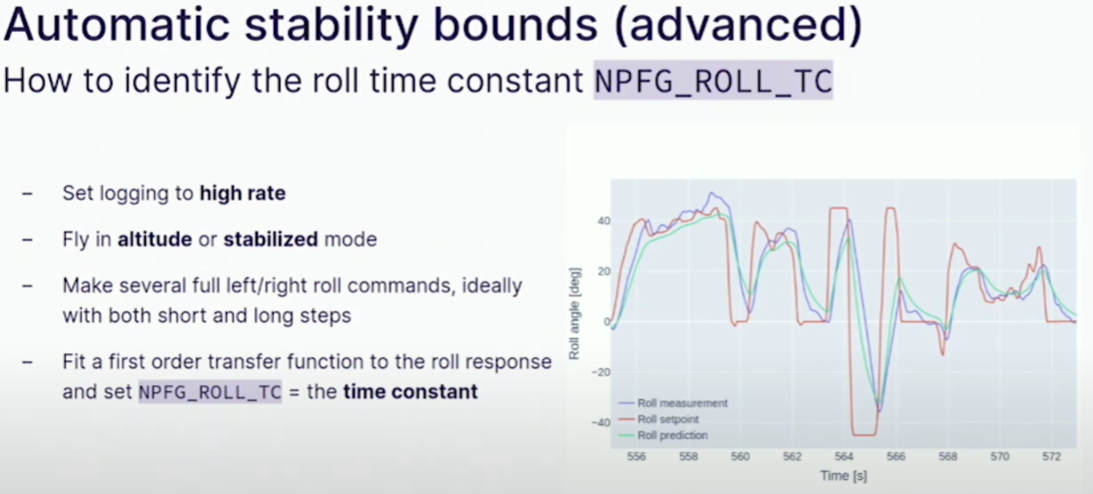
如果没有调好NPFG_PERIOD,出现过于激进的转弯,且你想使用自动稳定。可以设置参数NPFG_LB_PERIOD=1,该模式下会自动识别滚转周期来设定合理的NPFG_PERIOD。如果开启该功能,需要正确设定NPFG_ROLL_TC。
为了得到正确的NPFG_ROLL_TC:
- 需要将日志记录调整为高频率;
- 在定高或姿态模式下,长周期和短周期下,完整得左右打杆滚转数次,记录下日志;
- 得到滚转角的输入和输出响应,将其拟合出一阶传递函数;
- 一阶传递函数的时间常数值设定给NPFG_ROLL_TC。
强风下行为预设
强风下有两种预设行为:
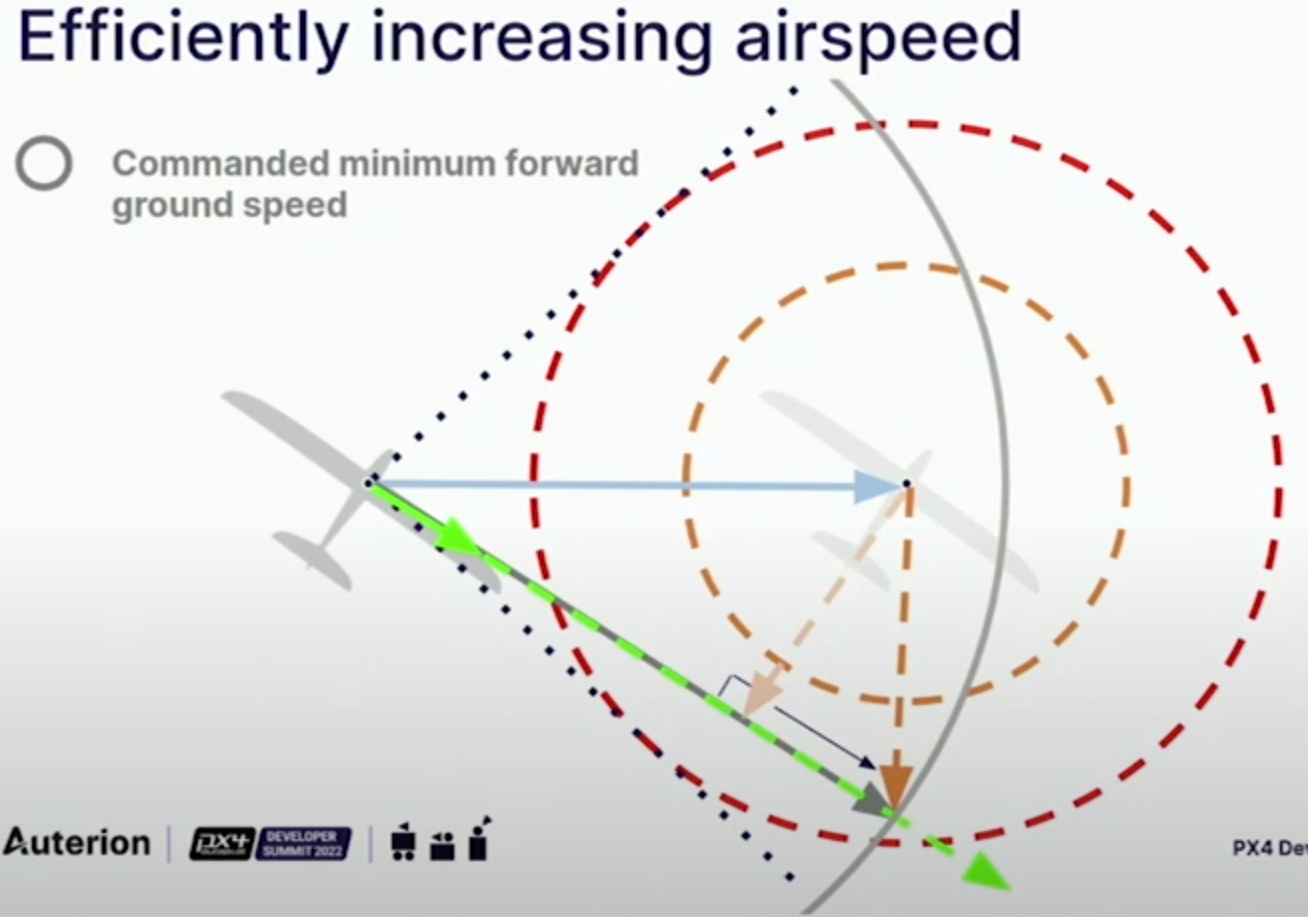
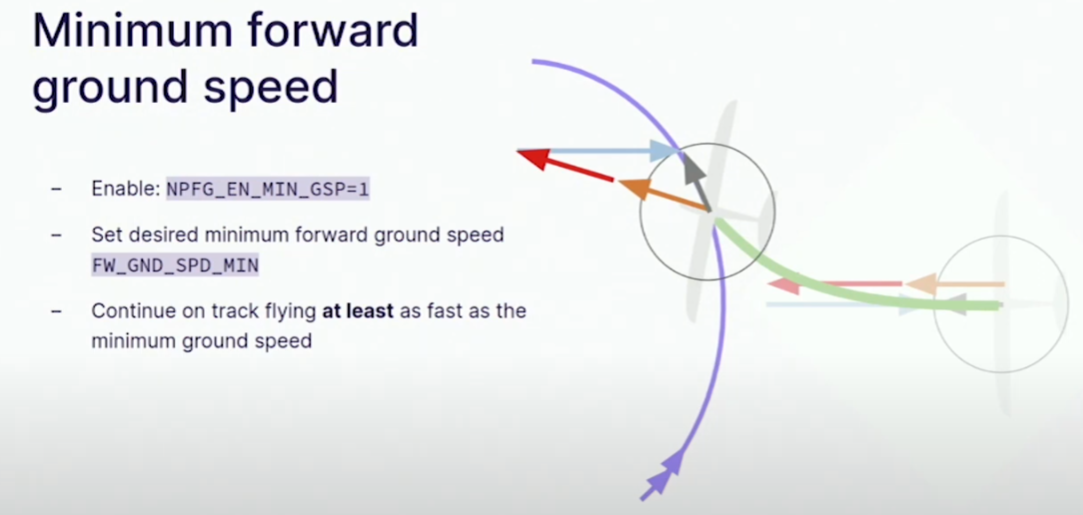
最小前向地速飞行:
设置参数:NPFG_EN_MIN_GSP=1
设定期望的最小前向地速:FW_GND_SPD_MIN
飞机缓慢飞行至期望轨迹处,到达轨迹后,制导保持与最小地速相同的速度。
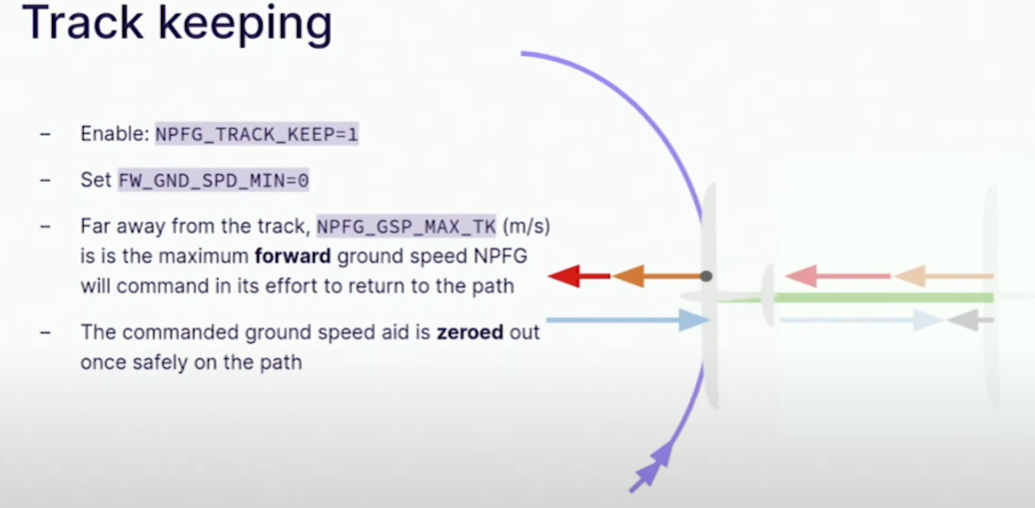
持续跟踪:
设置参数:NPFG_TRACK_KEEP=1
设定FW_GND_SPD_MIN=0
当飞机离期望轨迹较远时,NPFG_GSP_MAX_TK(m/s)是 NPFG 为返回航迹所命令的最大前向地速;一旦安全回到航迹,命令的地速辅助将被归零。
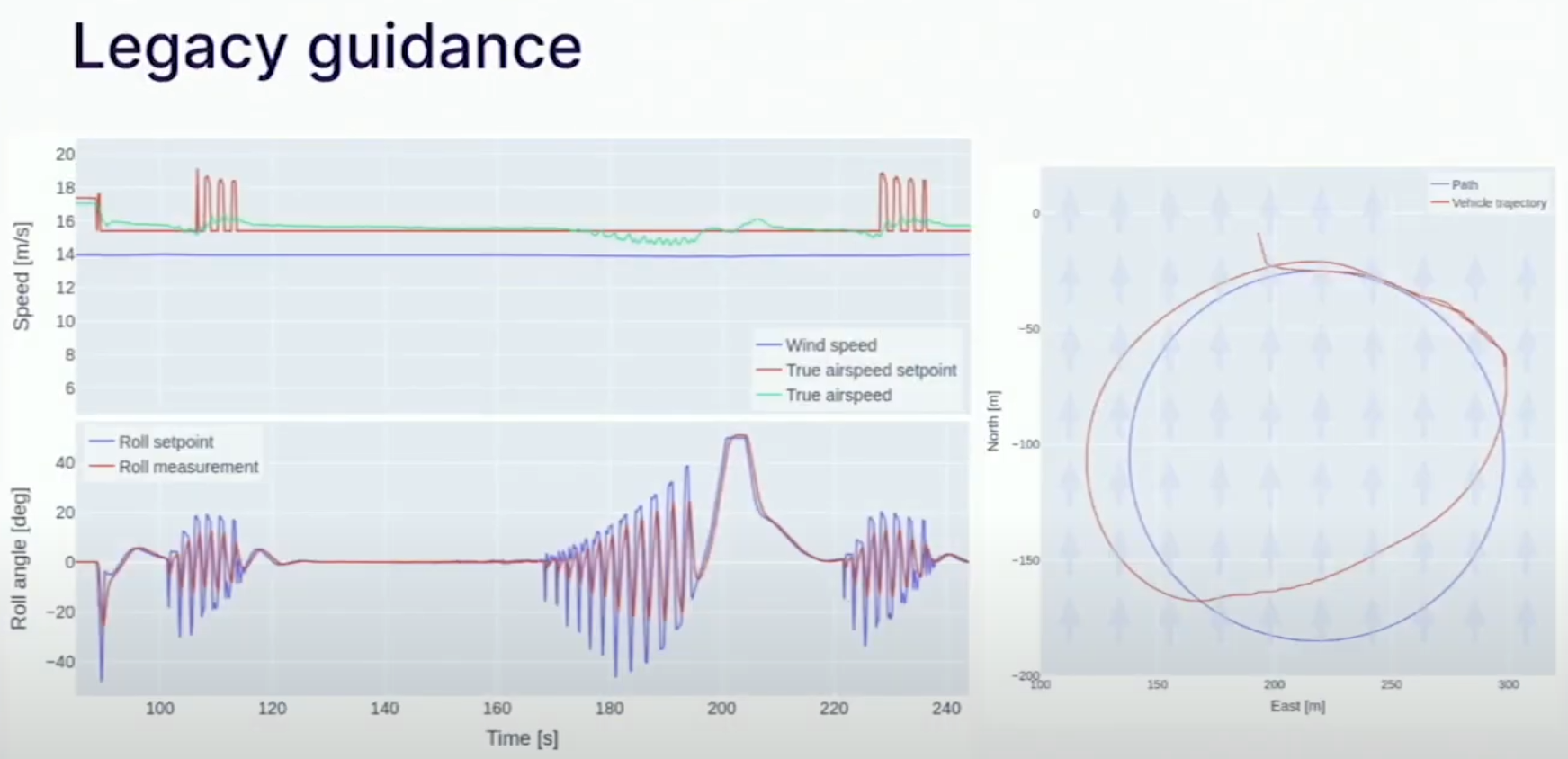
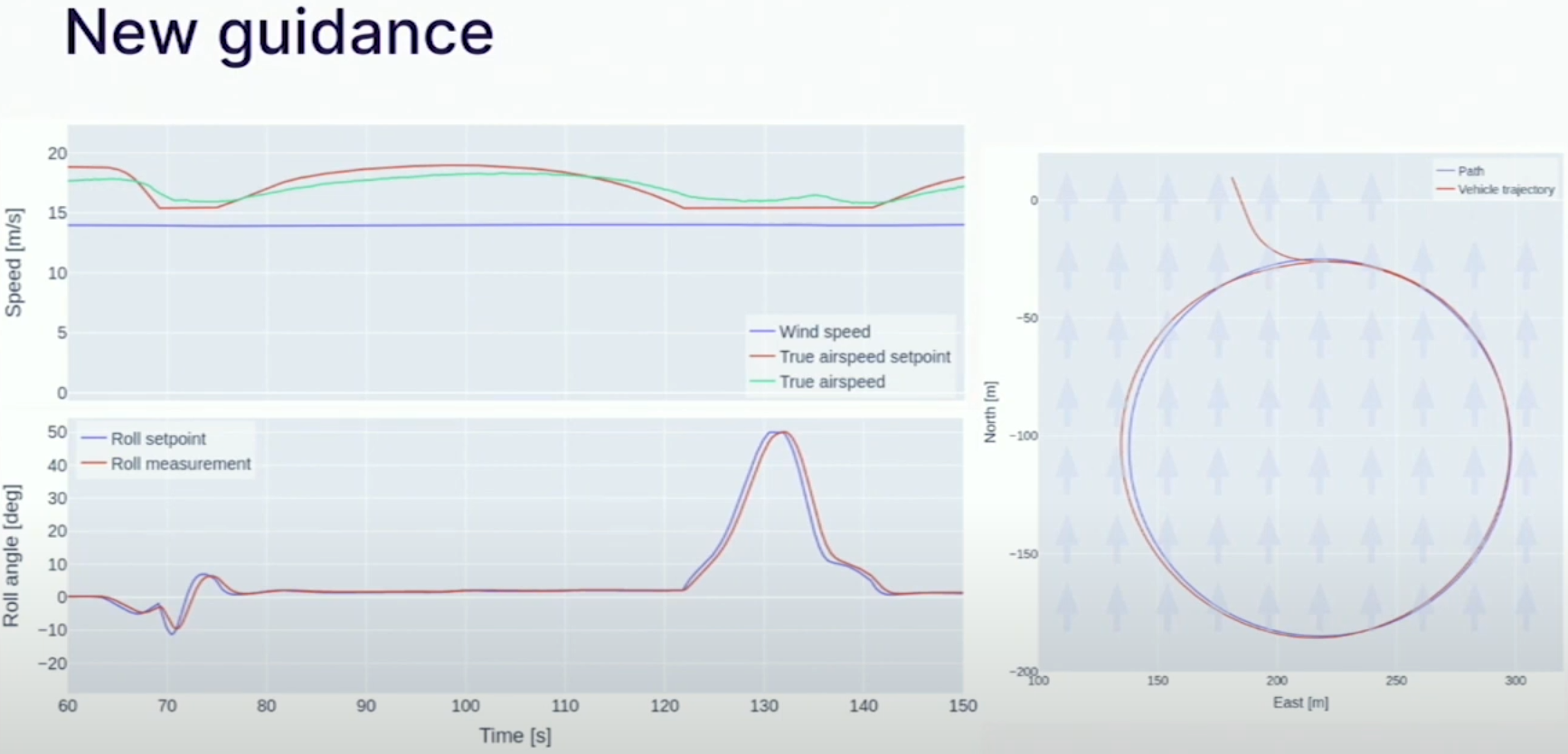
改进对比
采用NPFG后,强风下的路径跟踪效果有着显著提升。
原制导律路径跟踪效果:
NPFG路径跟踪效果:
总结
本期文章完成了PX4控制器讲解的最后一期,L1控制器+NPFG控制器。NPFG在强风环境下有着显著优势,感兴趣的朋友可以根据文章的介绍调试飞行一下,文末会放上相关文献及参考链接。
参考文献及链接
[1]PARK, Sanghyuk; DEYST, John; HOW, Jonathan. A new nonlinear guidance logic for trajectory tracking. In: AIAA guidance, navigation, and control conference and exhibit. 2004. p. 4900.
[2]STASTNY, Thomas; SIEGWART, Roland. On flying backwards: Preventing run-away of small, low-speed, fixed-wing UAVs in strong winds. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019. p. 5198-5205.
[3]https://github.com/PX4/PX4-Autopilot/pull/18810
[4]https://www.youtube.com/watch?v=LY6hYBCdy-0
END
迅翼SwiftWing致力于固定翼技术共享,汇聚固定翼领域技术极客,推动固定翼技术持续创新!