引言
项目背景
人形机器人作为智能技术的集大成者,正逐步从科幻电影走进现实生活,广泛应用于工业制造、医疗健康、家庭服务等多个领域。在这一发展过程中,传感器技术的飞速发展和物联网技术的广泛应用,极大地提升了人形机器人对环境的感知能力和数据处理能力,同时也对通信速度提出了更高要求。
目的
本文档旨在通过软件需求分析,明确软件系统的开发目标、功能需求、非功能需求等方面的要求,为后续的软件开发提供方向和指导。
需求概述
功能需求
-
高效数据传输:确保机器人各个部件(如传感器、执行器、控制器等)之间的数据传输具有极低的延迟,以满足实时控制的需求。支持高速数据传输,以满足高清视频、大量传感器数据等多媒体信息的实时传输需求。
-
可扩展:通信协议和接口应采用模块化设计,便于根据具体需求进行定制和扩展。确保通信方案能够与不同类型的机器人部件、传感器和执行器兼容,同时支持未来可能引入的新技术和设备。
-
多协议支持:支持多种通信协议(如CAN、Ethernet/IP等),以满足不同应用场景下的通信需求。提供协议转换功能,实现不同协议之间的无缝连接和互操作。
-
节点监控:有相应的内核监控程序,通过通信系统收集机器人的运行状态和故障信息,实现远程故障诊断和排查。
-
无线通信:支持Wi-Fi,以实现机器人与远程服务器、其他机器人或用户设备之间的无线通信。从云端获取大模型支持。
现有的人形机器人通讯方案
宇树&傅利叶机器人
[宇树G1机器人成本拆解](宇树G1机器人成本拆解 - 知乎 (zhihu.com))
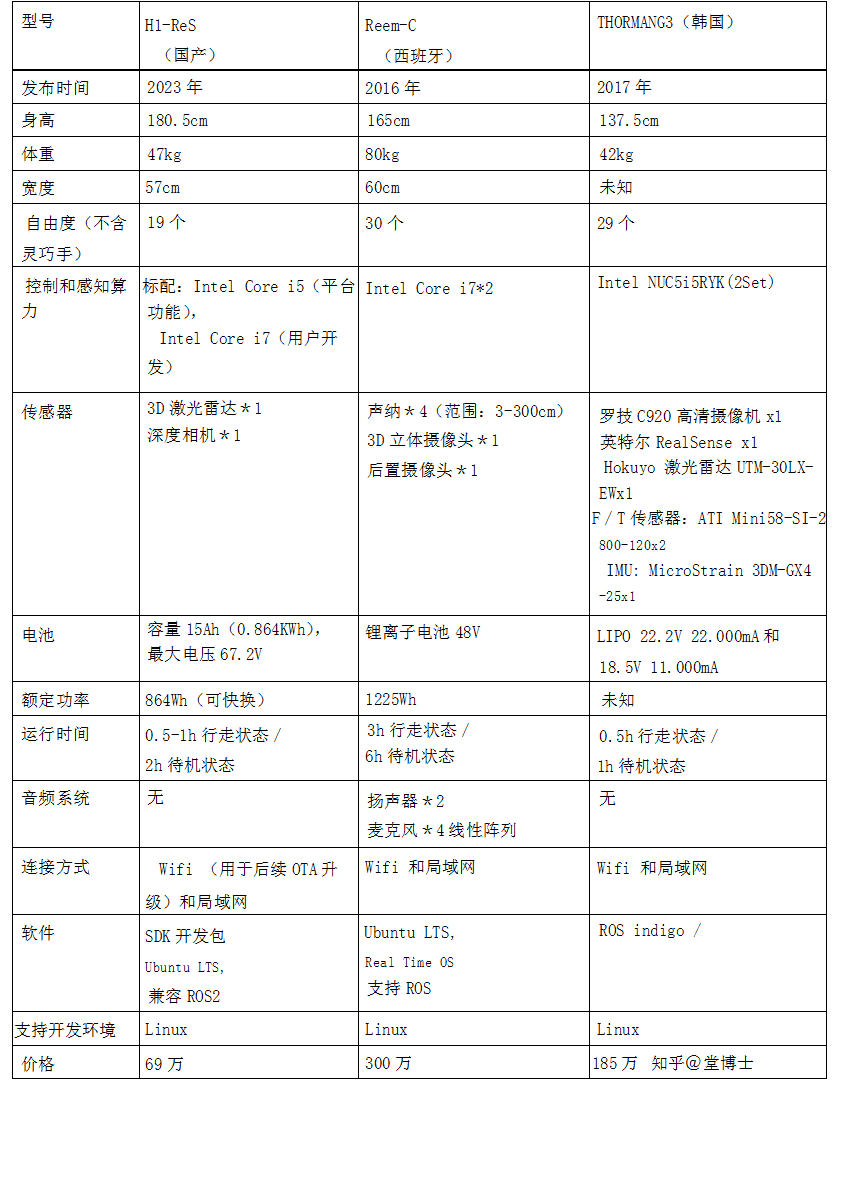
宇树的人形机器人采用了先进的通信方案,主要包括使用WiFi进行空中下载技术(OTA)升级和使用无线局域网(WLAN)进行传感器与关节的实时通讯。这种混合通信策略不仅确保了数据传输的灵活性和高效性,还兼顾了系统的稳定性和安全性。
-
OTA升级
-
便捷性和高效性:OTA允许人形机器人在不中断使用或返回服务中心的情况下,通过无线连接接收并安装最新的软件更新。这种即时性使得机器人能够迅速获得新功能、性能改进和漏洞修复。相比传统的物理更新方式,OTA减少了因停机升级而造成的服务中断,提高了设备的可用性和效率。
-
降低成本:OTA远程更新减少了人工干预的需求,无需将机器人送回制造商或服务中心进行更新,从而节省了运输、维修和劳动力成本。制造商可以快速将新功能推送给所有用户,而无需等待用户自行更新或进行复杂的部署操作。
-
加速产品迭代:OTA使得制造商能够更快速地响应市场变化和用户需求,通过软件更新来调整产品功能、优化性能或引入新的商业模式。OTA为制造商提供了一个持续创新的平台,使得他们可以在不改变硬件设计的情况下,通过软件升级来推动产品的技术进步。
-
便于扩大市场:OTA不受地域限制,制造商可以轻松地将软件更新推送给全球范围内的用户,从而加快产品的市场渗透率和普及率。
-
无限局域网局域网提升传输速率的同时,存在信号干扰的隐患,不够安全可靠
-
保密性差:无线电波在空中传输时,容易被第三方设备截获和监听。这意味着人形机器人传输的敏感数据(如用户信息、控制指令等)有可能被非法获取,导致数据泄露。如果无线局域网没有采用足够强度的加密技术,或者加密技术被破解,那么传输的数据将更容易被窃取。
-
网络防护差:无线局域网可能存在各种安全漏洞,如未授权的访问、假冒认证者攻击、会话劫持攻击等。这些漏洞可能被黑客利用,对人形机器人进行远程攻击和控制。通过无线局域网,恶意软件可能更容易感染人形机器人的软件系统,破坏其正常运行,甚至窃取控制权。
-
稳定性问题:无线局域网的信号可能受到环境因素的影响,如障碍物、电磁干扰等,导致信号不稳定或中断,进而影响数据传输的可靠性和安全性。
-
缺少监控和报警机制:与有线网络相比,无线局域网可能缺乏实时的安全监控和报警机制,难以及时发现和处理潜在的安全威胁。
特斯拉&智元机器人
特斯拉机器人
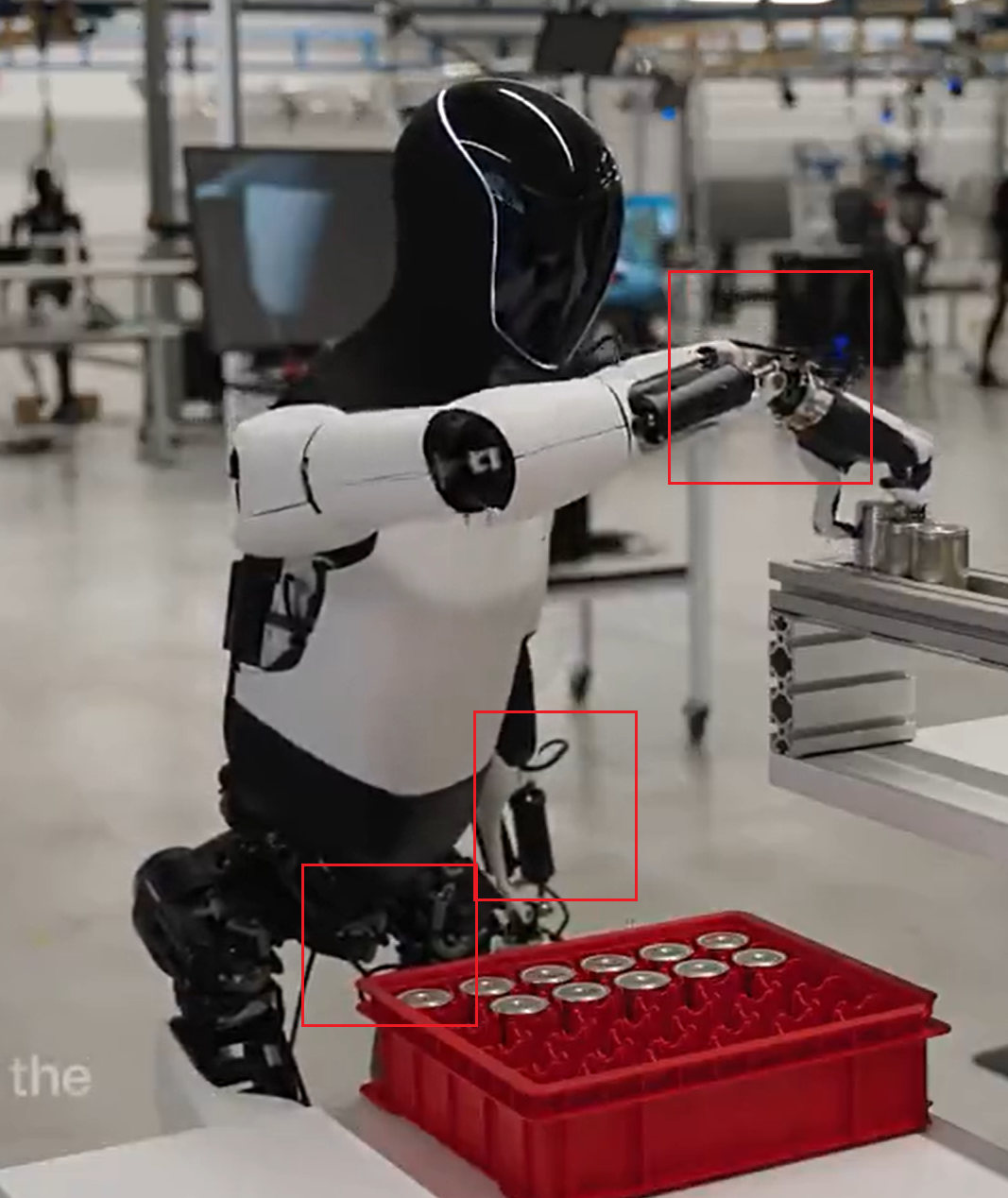

特斯拉的人形机器人上有大量裸露的排线,大概率和智元一样是走的硬线(Can总线)。智元的采取关节处使用Can而传感器使用I2C通讯。相比宇树机器人使用硬线传输增加了数据传输的可靠性和稳定性。缺点是如果随着传感器个数据采集精度提升和数据量增加,这种相对古老的通讯负载会大大增加,而且会有很大的数据延迟。
-
优点
-
抗干扰能力强:CAN总线采用非破坏性仲裁技术和短帧结构,有效避免了总线冲突和数据传输中的干扰,保证了数据的完整性和实时性。CAN总线通信具有较强的抗干扰能力,能够在高电磁干扰环境下稳定工作。这对于在复杂工业环境或户外环境中运行的人形机器人来说尤为重要。
-
网络拓扑结构灵活:CAN总线支持多种网络拓扑结构,如点对点、一对多及广播集中方式等,能够灵活适应不同规模和复杂度的机器人系统。
-
成本低:相比其他通信协议,CAN总线通信的硬件成本相对较低,且易于实现和维护。这有助于降低人形机器人的整体成本,并提高系统的性价比。
-
缺点
-
带宽限制:CAN总线的带宽相对较低,尤其是标准版本的CAN,其最高传输速率仅为1Mbps。虽然CAN FD版本提高了带宽,但与一些现代通信技术相比,其传输速率仍然有限。限制了在大规模数据传输或高速通信场景中的应用。
-
安全性较低:由于CAN总线采用广播式通信方式,所有节点都可以接收到总线上的数据,这可能导致数据泄露的风险增加。特别是在没有加密和认证机制的情况下,恶意节点可能会插入错误数据或干扰通信,对系统稳定性造成威胁。
总结
在对比无线局域网(WLAN)方案和有线CAN(Controller Area Network)方案时,我们可以发现这两种通信方式各有千秋。
无线局域网方案以其灵活性、便捷性和广泛的覆盖范围著称。它摆脱了物理连接的限制,使得人形机器人能够在更广阔的空间内自由移动和执行任务,无需担心线缆的束缚和限制。此外,无线局域网还支持高速数据传输,能够满足人形机器人对大量数据实时处理的需求。然而,无线局域网也存在一些固有的缺点,如信号稳定性受环境影响较大,安全性问题不容忽视,以及可能存在的频谱干扰等。这些问题在复杂或高要求的工业环境中可能尤为突出。
相比之下,有线CAN方案则以其高可靠性、实时性和强抗干扰能力而著称。CAN总线采用差分信号传输技术,能够有效抵抗电磁干扰,确保数据传输的稳定性和准确性。同时,CAN总线还支持多主通信和自动重发机制,进一步提高了系统的可靠性和实时性。此外,有线CAN方案的成本相对较低,易于实现和维护。然而,有线CAN方案也存在一些局限性,如布线复杂、灵活性不足以及可能受到物理障碍的限制等。这些问题在需要频繁移动或部署在复杂环境中的机器人系统中可能构成挑战。
系统设计
概述
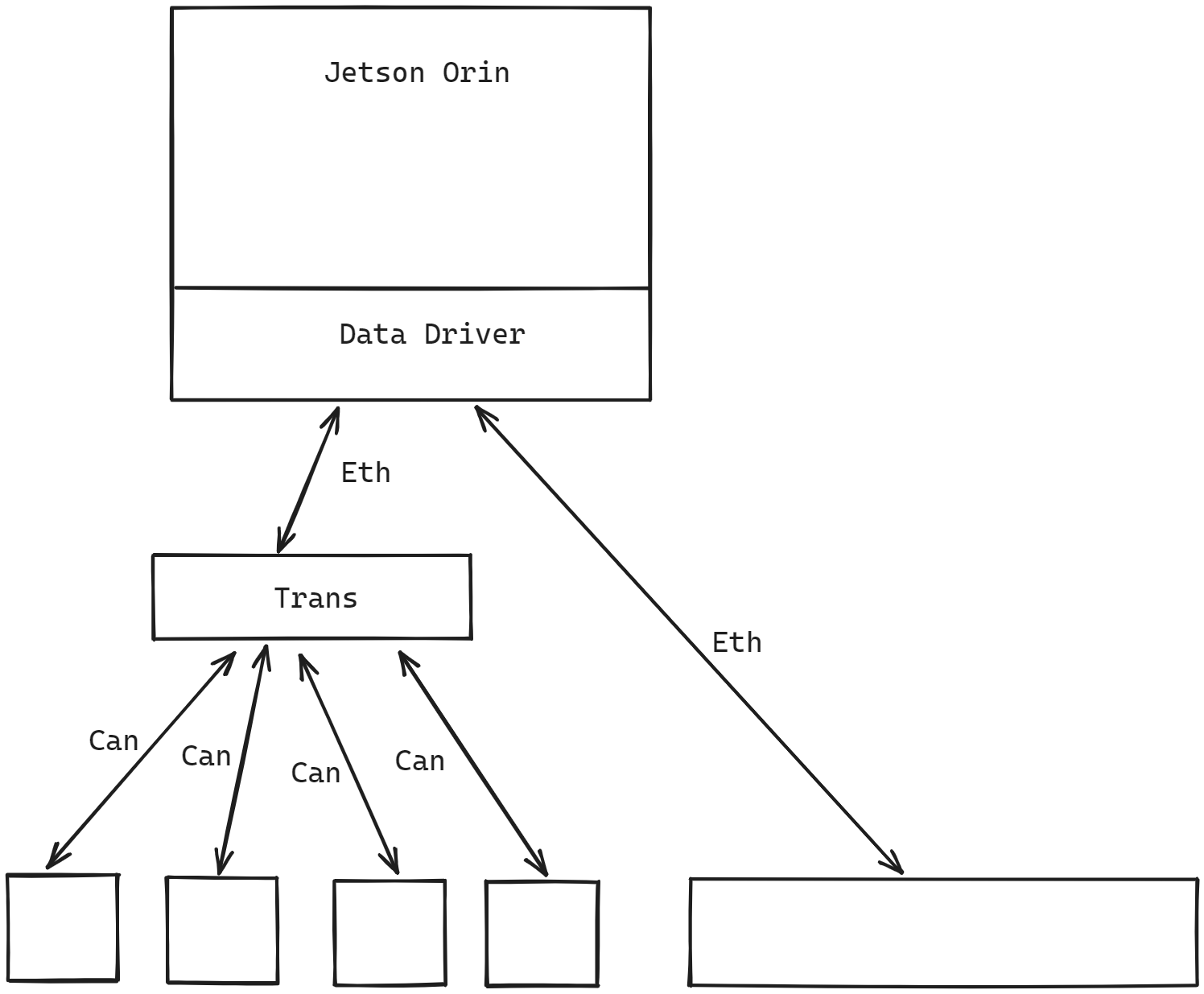
既然无线局域网方案和有线方案都有缺点,那能不能提出一种集二者之长的方案呢?我们可以使用有线的方案获取以太网的速率,并且兼顾扩展性。
-
将对带宽需求大的模块如激光雷达,深度相机等使用有线以太网传输。
-
将对带宽需求小的模块如力矩传感器,电机使用Can传输。
-
在主控上做一层类似
神经中枢的数据驱动层,将大脑的指令通过以太网下发;由下位机读取后编码成Can数据包再传输给不同的模块。同理,传感器在采集到数据后通过Can向下位机传输,下位机向中枢神经发送以太网数据包。
问题解决
针对解决无线局域网方案和有线Can方案存在的问题提出的有线以太网+Can的方案解决了以下问题:
-
安全性:使用IP屏蔽技术(IP屏蔽,又称IP封锁或IP过滤,是指在网络环境中,通过特定的技术手段阻止或限制特定IP地址或IP地址范围的设备访问网络资源或服务。这种措施通常由网络管理员或系统自动执行,旨在提高网络安全性,防止恶意访问、攻击或非法行为。)在数据驱动层维护一下IP白名单,只有在白名单内的节点可以将数据发送给大脑,其他的则会过滤。
-
带宽:以太网技术能够支持较高的数据传输速率,常见的以太网速率包括10 Mbps、100 Mbps、1 Gbps(1000 Mbps)甚至更高(如10 Gbps、40 Gbps、100 Gbps等。配合Can对少量数据的实时性传输,使得整个系统的传输速率大大提高,即使是日后接入更加先进的传感器,也可以稳定高速传输。
-
信号干扰:有线以太网通过物理连接,避免了无线信号在传输过程中可能遇到的多种干扰源,如电磁干扰、信号衰减、多径效应等。同时,CAN总线以其差分信号传输技术和高可靠性设计,进一步增强了系统的抗干扰能力。相比之下,无线局域网虽然提供了灵活性和便捷性,但其信号在传输过程中容易受到环境因素的影响。
-
灵活性:在数据驱动层添加以太网协议,为系统带来了前所未有的协议灵活扩展能力。这一举措不仅充分利用了以太网技术成熟、标准化程度高的优势,还使得系统能够轻松适应不同应用场景下的数据传输需求。通过简单地调整或升级以太网协议栈,系统可以快速响应市场变化和技术革新,支持更多样化的数据格式和通信协议。这种灵活性极大地降低了系统集成和维护的复杂性,同时也为用户提供了更加丰富和定制化的解决方案。