往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- OpenHarmony(鸿蒙南向开发)——轻量和小型系统三方库移植指南(一)
- OpenHarmony(鸿蒙南向开发)——轻量和小型系统三方库移植指南(二)
- OpenHarmony(鸿蒙南向开发)——轻量系统芯片移植案例(一)
- OpenHarmony(鸿蒙南向开发)——轻量系统芯片移植案例(二)
- OpenHarmony(鸿蒙南向开发)——轻量系统芯片移植案例(三)
- OpenHarmony(鸿蒙南向开发)——轻量系统STM32F407芯片移植案例
- 持续更新中……
轻量系统STM32F407芯片移植案例
介绍基于STM32F407IGT6芯片在拓维信息 Niobe407 开发板上移植OpenHarmony LiteOS-M轻量系统,提供交通、工业领域开发板解决方案。移植架构采用Board与SoC分离方案,使用arm gcc工具链Newlib C库,实现了lwip、littlefs、hdf等子系统及组件的适配,开发了配套应用示例代码,支持通过Kconfig图形化配置编译选项。
适配准备
- 下载 stm32cubemx 图形工具。
- 准备ubuntu20.04系统环境,安装 arm-none-eabi-gcc 交叉编译工具链。
生成可用工程
通过stm32cubemx工具生成STM32F407IGT6芯片的Makefile工程,在此给出如下配置建议:
- 系统相关配置采用默认配置。
- 时钟配置时将SYSCLK选项配置为168MHz,发挥芯片最强性能。
- 配置USART1用作调试串口,用来打印适配过程中的调试信息。
- 配置stm32cubemx工程选项时,将Toolchain/IDE选项选为Makefile。
生成的工程目录如下:
├── Core
│ ├── Inc
│ │ ├── main.h
│ │ ├── stm32f4xx_hal_conf.h
│ │ └── stm32f4xx_it.h
│ └── Src
│ ├── main.c --- 主函数
│ ├── stm32f4xx_hal_msp.c --- HAL库弱函数配置文件
│ ├── stm32f4xx_it.c --- 中断回调函数文件
│ └── system_stm32f4xx.c --- 系统
├── Drivers
│ ├── CMSIS --- CMSIS接口
│ └── STM32F4xx_HAL_Driver --- HAL库驱动
├── Makefile --- Makefile编译
├── STM32F407IGTx_FLASH.ld --- 链接文件
├── startup_stm32f407xx.s --- 启动文件
└── stm32f407_output.ioc --- stm32cubemx工程文件
验证生成的工程
将生成的工程拷贝至Ubuntu,进入工程目录下执行make命令编译,确定能够编译成功。
arm-none-eabi-gcc build/main.o build/stm32f4xx_it.o build/stm32f4xx_hal_msp.o build/stm32f4xx_hal_tim.o build/stm32f4xx_hal_tim_ex.o build/stm32f4xx_hal_uart.o build/stm32f4xx_hal_rcc.o build/stm32f4xx_hal_rcc_ex.o build/stm32f4xx_hal_flash.o build/stm32f4xx_hal_flash_ex.o build/stm32f4xx_hal_flash_ramfunc.o build/stm32f4xx_hal_gpio.o build/stm32f4xx_hal_dma_ex.o build/stm32f4xx_hal_dma.o build/stm32f4xx_hal_pwr.o build/stm32f4xx_hal_pwr_ex.o build/stm32f4xx_hal_cortex.o build/stm32f4xx_hal.o build/stm32f4xx_hal_exti.o build/system_stm32f4xx.o build/startup_stm32f407xx.o -mcpu=cortex-m4 -mthumb -mfpu=fpv4-sp-d16 -mfloat-abi=hard -specs=nano.specs -TSTM32F407IGTx_FLASH.ld -lc -lm -lnosys -Wl,-Map=build/stm32f407_output.map,--cref -Wl,--gc-sections -o build/stm32f407_output.elf
arm-none-eabi-size build/stm32f407_output.elf
text data bss dec hex filename
5000 20 1636 6656 1a00 build/stm32f407_output.elf
arm-none-eabi-objcopy -O ihex build/stm32f407_output.elf build/stm32f407_output.hex
arm-none-eabi-objcopy -O binary -S build/stm32f407_output.elf build/stm32f407_output.bin
编译完成会生成一个.bin文件,为了确认该程序能在开发板中成功运行,需要main函数中的串口初始化之后,通过串口输出一段字符串,运行时若收到打印信息,则开发板启动成功。
printf("hello world!!\r\n");
适配printf输出到串口,只需要重写_write函数即可,参考如下:
#include <stdio.h>
int _write(int fd, char *ptr, int len)
{
return HAL_UART_Transmit(&huart1, (uint8_t *)ptr, len, 0xFFFF);
}
重新编译代码,将其烧录至开发板中验证。
编译构建
目录规划
芯片适配目录规划为:
device
├── board --- 单板厂商目录
│ └── talkweb --- 单板厂商名字:拓维信息
│ └── niobe407 --- 单板名:与产品名一致
└── soc --- SoC厂商目录
└── st --- SoC厂商名称
└── stm32f4xx --- SoC Series名:stm32f4xx是一个系列,包含该系列soc相关代码
产品样例目录规划为:
vendor
└── talkweb --- 开发产品样例厂商目录
└── niobe407 --- 产品名字:niobe407
获取 OpenHarmony源码 ,根据上述目录规划,创建相应文件夹。
预编译适配
预编译适配内容就是围绕hb set命令的适配,使工程能够通过该命令设置根目录、单板目录、产品目录、单板公司名等环境变量,为后续适配编译做准备。
具体的预编译适配步骤如下:
1.在vendor/talkweb/niobe407目录下新增config.json文件,用于描述这个产品样例所使用的单板、内核等信息,描述信息可参考如下内容:
{
"product_name": "niobe407", --- 用于hb set进行选择时,显示的产品名称
"type": "mini", --- 构建系统的类型,mini/small/standard
"version": "3.0", --- 构建系统的版本,1.0/2.0/3.0
"device_company": "talkweb", --- 单板厂商名,用于编译时找到/device/board/talkweb目录
"board": "niobe407", --- 单板名,用于编译时找到/device/board/talkweb/niobe407目录
"kernel_type": "liteos_m", --- 内核类型,因为OpenHarmony支持多内核,一块单板可能适配了多个内核,所以需要指定某个内核进行编译
"kernel_version": "3.0.0", --- 内核版本,一块单板可能适配了多个linux内核版本,所以需要指定某个具体的内核版本进行编译
"subsystems": [ ] --- 选择所需要编译构建的子系统
}
2.在//device/board/talkweb/niobe407目录下创建board目录,在创建的目录下新增一个config.gni文件,用于描述该产品的编译配置信息:
# Kernel type, e.g. "linux", "liteos_a", "liteos_m".
kernel_type = "liteos_m" --- 内核类型,跟config.json中kernel_type对应
# Kernel version.
kernel_version = "3.0.0" --- 内核版本,跟config.json中kernel_version对应
3.验证hb set配置是否正确,输入hb set能够显示如下信息:

4.通过hb env可以查看选择出来的预编译环境变量:

5.hb介绍
hb是OpenHarmony为了方便开发者进行代码构建编译,提供的python脚本工具,其源码就在//build/lite仓库目录下。在执行hb set命令时,脚本会遍历//vendor/<product_company>/<product_name>目录下的config.json,给出可选产品编译选项。在config.json文件中,product_name表示产品名,device_company和board用于关联出//device/board/<device_company>/目录,匹配该目录下的<any_dir_name>/config.gni文件,其中<any_dir_name>目录名可以是任意名称,但建议将其命名为适配内核名称(如:liteos_m、liteos_a、linux)。hb命令如果匹配到了多个config.gni,会将其中的kernel_type和kernel_version字段与vendor/<device_company>下config.json文件中的字段进行匹配,从而确定参与编译的config.gni文件。
至此,预编译适配完成,但工程还不能执行hb build进行编译,还需要准备好后续的LiteOS-M内核移植。
内核移植
内核移植需要完成LiteOS-M Kconfig适配、gn的编译构建和内核启动最小适配。
Kconfig文件适配
1.在//vendor/talkweb/niobe407目录下创建kernel_configs目录,并创建空文件,命名为debug.config。
2.打开//kernel/liteos_m/Kconfig文件,可以看到在该文件通过orsource命令导入了//device/board和//device/soc下多个Kconfig文件,后续需要创建并修改这些文件:
orsource "../../device/board/*/Kconfig.liteos_m.shields"
orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.defconfig.boards"
orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.boards"
orsource "../../device/soc/*/Kconfig.liteos_m.defconfig"
orsource "../../device/soc/*/Kconfig.liteos_m.series"
orsource "../../device/soc/*/Kconfig.liteos_m.soc"
3.在//device/board/talkweb下参考如下目录结构创建相应的Kconfig文件:
.
├── Kconfig.liteos_m.boards
├── Kconfig.liteos_m.defconfig.boards
├── Kconfig.liteos_m.shields
└── niobe407
├── Kconfig.liteos_m.board --- 开发板配置选项
├── Kconfig.liteos_m.defconfig.board --- 开发板默认配置选项
└── liteos_m
└── config.gni
- 修改
Kconfig文件内容:
- 在
//device/board/talkweb/Kconfig.liteos_m.boards文件中添加:
if SOC_STM32F407
orsource "niobe407/Kconfig.liteos_m.board" --- 可根据SOC定义,加载指定board目录定义
endif
- 在
//device/board/talkweb/Kconfig.liteos_m.defconfig.boards文件中添加:
orsource "*/Kconfig.liteos_m.defconfig.board"
- 在
//device/board/talkweb/Kconfig.liteos_m.defconfig.boards文件中添加:
orsource "shields/Kconfig.liteos_m.shields"
- 在
//device/board/talkweb/niobe407/Kconfig.liteos_m.board文件中添加:
menuconfig BOARD_NIOBE407
bool "select board niobe407"
depends on SOC_STM32F407 --- niobe407使用的是stm32f407的SoC,只有SoC被选择后,niobe407的配置选项才可见、可以被选择。
- 在
//device/board/talkweb/niobe407/Kconfig.liteos_m.defconfig.board中添加:
if BOARD_NIOBE407
--- 用于添加BOARD_NIOBE407默认配置
endif #BOARD_NIOBE407
- 在
//device/soc/st下参考如下目录结构创建相应的Kconfig文件,并将stm32cubemx自动生成工程中的Drivers目录拷贝至stm32f4xx/sdk目录下:
.
├── Kconfig.liteos_m.defconfig
├── Kconfig.liteos_m.series
├── Kconfig.liteos_m.soc
└── stm32f4xx
├── Kconfig.liteos_m.defconfig.series
├── Kconfig.liteos_m.defconfig.stm32f4xx
├── Kconfig.liteos_m.series
├── Kconfig.liteos_m.soc
└── sdk
└── Drivers
├── CMSIS
└── STM32F4xx_HAL_Driver
6.修改Kconfig文件内容:
- 在
//device/soc/st/Kconfig.liteos_m.defconfig中添加:
rsource "*/Kconfig.liteos_m.defconfig.series"
- 在
//device/soc/st/Kconfig.liteos_m.series中添加:
rsource "*/Kconfig.liteos_m.series"
- 在
//device/soc/st/Kconfig.liteos_m.soc中添加:
config SOC_COMPANY_STMICROELECTRONICS
bool
if SOC_COMPANY_STMICROELECTRONICS
config SOC_COMPANY
default "st"
rsource "*/Kconfig.liteos_m.soc"
endif # SOC_COMPANY_STMICROELECTRONICS
- 在
//device/soc/st/stm32f4xx/Kconfig.liteos_m.defconfig.series中添加:
if SOC_SERIES_STM32F4xx
rsource "Kconfig.liteos_m.defconfig.stm32f4xx"
config SOC_SERIES
string
default "stm32f4xx"
endif
- 在
//device/soc/st/stm32f4xx/Kconfig.liteos_m.defconfig.stm32f4xx中添加:
config SOC
string
default "stm32f4xx"
depends on SOC_STM32F4xx
- 在
//device/soc/st/stm32f4xx/Kconfig.liteos_m.series中添加:
config SOC_SERIES_STM32F4xx
bool "STMicroelectronics STM32F4xx series"
select ARCH_ARM
select SOC_COMPANY_STMICROELECTRONICS
select CPU_CORTEX_M4
help
Enable support for STMicroelectronics STM32F4xx series
- 在
//device/soc/st/stm32f4xx/Kconfig.liteos_m.soc中添加:
choice
prompt "STMicroelectronics STM32F4xx series SoC"
depends on SOC_SERIES_STM32F4xx
config SOC_STM32F407
bool "SoC STM32F407"
endchoice
- 在
kernel/liteos_m目录下执行make menuconfig,使得能够对SoC Series进行选择:

结果将自动保存在$(PRODUCT_PATH)/kernel_configs/debug.config,下次执行make menuconfig时会导出保存的结果。
BUILD.gn文件适配
为了快速熟悉gn的编译和适配,建议先阅读 LiteOS-M内核BUILD.gn编写指南。
(注意,BUILD.gn文件中不要出现tab字符,所有tab用空格代替)
- 在
kernel/liteos_m/BUILD.gn中,可以看到,通过deps指定了Board和SoC的编译入口:
deps += [ "//device/board/$device_company" ] --- 对应//device/board/talkweb目录
deps += [ "//device/soc/$LOSCFG_SOC_COMPANY" ] --- 对应//device/soc/st目录
- 在
//device/board/talkweb/BUILD.gn中,新增内容如下:
if (ohos_kernel_type == "liteos_m") {
import("//kernel/liteos_m/liteos.gni")
module_name = get_path_info(rebase_path("."), "name")
module_group(module_name) {
modules = [ "niobe407" ]
}
}
3.在niobe407目录下创建BUILD.gn,为了方便管理,将目录名作为模块名:
import("//kernel/liteos_m/liteos.gni")
module_name = get_path_info(rebase_path("."), "name")
module_group(module_name) {
modules = [
"liteos_m",
]
}
4.将stm32cubemx生成的示例工程Core目录下的文件、startup_stm32f407xx.s启动文件和STM32F407IGTx_FLASH.ld链接文件拷贝至//device/board/talkweb/niobe407/liteos_m/目录下,并在该目录下创建BUILD.gn,添加如下内容:
import("//kernel/liteos_m/liteos.gni")
module_name = get_path_info(rebase_path("."), "name")
kernel_module(module_name) {
sources = [
"startup_stm32f407xx.s",
"Src/main.c",
"Src/stm32f4xx_hal_msp.c",
"Src/stm32f4xx_it.c",
"Src/system_stm32f4xx.c",
]
include_dirs = [
"Inc",
]
}
config("public") {
ldflags = [
"-Wl,-T" + rebase_path("STM32F407IGTx_FLASH.ld"),
"-Wl,-u_printf_float",
]
libs = [
"c",
"m",
"nosys",
]
}
5.在make menuconfig中配置(Top) → Compat → Choose libc implementation,选择newlibc。
6.由于_write函数会与kernel的文件操作函数重名,会导致编译失败。后续会换一种方法来适配printf函数,此处我们先将main.c文件中对_write函数的重写删除,将printf函数改用如下方式进行串口打印测试。
uint8_t test[]={"hello niobe407!!\r\n"};
int len = strlen(test);
HAL_UART_Transmit(&huart1, (uint8_t *)test, len, 0xFFFF);
7.同理//device/soc/st/BUILD.gn也是一样,按照目录结构层层依赖包含,最终在//device/soc/st/stm32f4xx/sdk/BUILD.gn中通过kernel_module模板中指定需要参与编译的文件及编译参数,参考如下:
import("//kernel/liteos_m/liteos.gni")
module_name = "stm32f4xx_sdk"
kernel_module(module_name) {
asmflags = board_asmflags
sources = [
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc_ex.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_gpio.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma_ex.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_cortex.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_exti.c",
"Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_uart.c",
]
}
#指定全局头文件搜索路径
config("public") {
include_dirs = [
"Drivers/STM32F4xx_HAL_Driver/Inc",
"Drivers/CMSIS/Device/ST/STM32F4xx/Include",
]
}
config.gni文件适配
在预编译阶段,在//device/board/talkweb/niobe407/liteos_m目录下创建了一个config.gni文件,它其实就是gn脚本的头文件,可以理解为工程构建的全局配置文件。主要配置了CPU型号、交叉编译工具链及全局编译、链接参数等重要信息:
# Kernel type, e.g. "linux", "liteos_a", "liteos_m".
kernel_type = "liteos_m"
# Kernel version.
kernel_version = "3.0.0"
# Board CPU type, e.g. "cortex-a7", "riscv32".
board_cpu = "cortex-m4"
# Board arch, e.g. "armv7-a", "rv32imac".
board_arch = ""
# Toolchain name used for system compiling.
# E.g. gcc-arm-none-eabi, arm-linux-harmonyeabi-gcc, ohos-clang, riscv32-unknown-elf.
# Note: The default toolchain is "ohos-clang". It's not mandatory if you use the default toolchain.
board_toolchain = "arm-none-eabi-gcc"
use_board_toolchain = true
# The toolchain path installed, it's not mandatory if you have added toolchain path to your ~/.bashrc.
board_toolchain_path = ""
# Compiler prefix.
board_toolchain_prefix = "arm-none-eabi-"
# Compiler type, "gcc" or "clang".
board_toolchain_type = "gcc"
#Debug compiler optimization level options
board_opt_flags = [
"-mcpu=cortex-m4",
"-mthumb",
"-mfpu=fpv4-sp-d16",
"-mfloat-abi=hard",
]
# Board related common compile flags.
board_cflags = [
"-Og",
"-Wall",
"-fdata-sections",
"-ffunction-sections",
"-DSTM32F407xx",
]
board_cflags += board_opt_flags
board_asmflags = [
"-Og",
"-Wall",
"-fdata-sections",
"-ffunction-sections",
]
board_asmflags += board_opt_flags
board_cxx_flags = board_cflags
board_ld_flags = board_opt_flags
# Board related headfiles search path.
board_include_dirs = [ "//utils/native/lite/include" ]
# Board adapter dir for OHOS components.
board_adapter_dir = ""
如上所示,比较难理解的就是board_opt_flags、board_cflags、board_asmflags等几个参数配置。可以参考如下描述,从stm32cubemx生成的工程中的Makefile文件中提取出来:
board_opt_flags : 编译器相关选项,一般为芯片架构、浮点类型、编译调试优化等级等选项。
board_asmflags :汇编编译选项,与Makefile中的ASFLAGS变量对应。
board_cflags :C代码编译选项,与Makefile中的CFLAGS变量对应。
board_cxx_flags :C++代码编译选项,与Makefile中的CXXFLAGS变量对应。
board_ld_flags :链接选项,与Makefile中的LDFLAGS变量对应。
内核子系统适配
在//vendor/talkweb/niobe407/config.json文件中添加内核子系统及相关配置,如下所示:
{
"product_name": "niobe407",
"type": "mini",
"version": "3.0",
"device_company": "talkweb",
"board": "niobe407",
"kernel_type": "liteos_m",
"kernel_version": "3.0.0",
"subsystems": [
{
"subsystem": "kernel",
"components": [
{
"component": "liteos_m"
}
]
}
],
"product_adapter_dir": "",
"third_party_dir": "//third_party"
}
target_config.h文件适配
在//kernel/liteos_m/kernel/include/los_config.h文件中,有包含一个名为target_config.h的头文件,如果没有这个头文件,则会编译出错。
该头文件的作用主要是定义一些与soc芯片相关的宏定义,可以创建一个空头文件,再配合编译报错提示信息来确定需要定义哪些宏。经验证,Cortex-M4的核适配只需定义LOSCFG_BASE_CORE_TICK_RESPONSE_MAX宏并包含stm32f4xx.h头文件即可将kernel编译通过。
若前期不知如何配置,可以参考虚拟机qemu示例中//device/qemu/arm_mps2_an386/liteos_m/board/target_config.h的配置。
#ifndef _TARGET_CONFIG_H
#define _TARGET_CONFIG_H
#define LOSCFG_BASE_CORE_TICK_RESPONSE_MAX 0xFFFFFFUL
#include "stm32f4xx.h" //包含了stm32f4平台大量的宏定义
#endif
其中宏定义LOSCFG_BASE_CORE_TICK_RESPONSE_MAX是直接参考的//device/qemu/arm_mps2_an386/liteos_m/board/target_config.h文件中的配置,//device/qemu/arm_mps2_an386是cortex-m4的虚拟机工程,后续适配可以直接参考,在此不做深入讲解。
内核启动适配
至此,已经可以成功将kernel子系统编译通过,并且在out目录下生成OHOS_Image.bin文件。将生成的OHOS_Image.bin文件烧录至开发板,验证板子能否正常启动运行,如果能成功打印出main函数中串口输出的正确的打印信息,则可以开始进行内核启动适配。
1.为liteos_m分配内存,适配内存分配函数
在文件//kernel/liteos_m/kernel/src/mm/los_memory.c中,OsMemSystemInit函数通过LOS_MemInit进行了内存初始化。可以看到几个比较关键的宏需要我们指定,我们将其添加到target_config.h中:
extern unsigned int __los_heap_addr_start__;
extern unsigned int __los_heap_addr_end__;
#define LOSCFG_SYS_EXTERNAL_HEAP 1
#define LOSCFG_SYS_HEAP_ADDR ((void *)&__los_heap_addr_start__)
#define LOSCFG_SYS_HEAP_SIZE (((unsigned long)&__los_heap_addr_end__) - ((unsigned long)&__los_heap_addr_start__))
其中,__los_heap_addr_start__与__los_heap_addr_end__变量在STM32F407IGTx_FLASH.ld链接文件中被定义, 将_user_heap_stack花括号内内容修改为:
._user_heap_stack :
{
. = ALIGN(0x40);
__los_heap_addr_start__ = .;
__los_heap_addr_end__ = ORIGIN(RAM) + LENGTH(RAM);
} >RAM
除此之外,我们还需要适配内存分配函数,由于内核中已经对_malloc_r等内存分配函数进行了实现,在此我们采用包装函数的方式来适配,用内核中的内存分配函数替换标准库中的内存分配函数即可,在//device/board/talkweb/niobe407/liteos_m/config.gni中board_ld_flags链接参数变量修改为:
board_ld_flags = [
"-Wl,--wrap=_calloc_r",
"-Wl,--wrap=_malloc_r",
"-Wl,--wrap=_realloc_r",
"-Wl,--wrap=_reallocf_r",
"-Wl,--wrap=_free_r",
"-Wl,--wrap=_memalign_r",
"-Wl,--wrap=_malloc_usable_size_r",
]
board_ld_flags += board_opt_flags
2.适配printf打印
为了方便后续调试,第一步需要先适配printf函数。而printf的函数适配可大可小,在此只做简单适配,具体实现可以参考其它各开发板源码。
在main.c同级目录下创建dprintf.c文件,文件内容如下:
#include <stdarg.h>
#include "los_interrupt.h"
#include <stdio.h>
extern UART_HandleTypeDef huart1;
INT32 UartPutc(INT32 ch, VOID *file)
{
char RL = '\r';
if (ch =='\n') {
HAL_UART_Transmit(&huart1, &RL, 1, 0xFFFF);
}
return HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
}
static void dputs(char const *s, int (*pFputc)(int n, FILE *cookie), void *cookie)
{
unsigned int intSave;
intSave = LOS_IntLock();
while (*s) {
pFputc(*s++, cookie);
}
LOS_IntRestore(intSave);
}
int printf(char const *fmt, ...)
{
char buf[1024] = { 0 };
va_list ap;
va_start(ap, fmt);
int len = vsnprintf_s(buf, sizeof(buf), 1024 - 1, fmt, ap);
va_end(ap);
if (len > 0) {
dputs(buf, UartPutc, 0);
} else {
dputs("printf error!\n", UartPutc, 0);
}
return len;
}
在串口初始化之后使用printf函数打印,测试是否适配成功。
3.调用LOS_KernelInit初始化内核,进入任务调度。
在main函数中串口初始化之后,调用LOS_KernelInit进行初始化,创建任务示例,进入任务调度。
#include "los_task.h"
UINT32 ret;
ret = LOS_KernelInit(); //初始化内核
if (ret == LOS_OK) {
TaskSample(); //示例任务函数,在此函数中创建线程任务
LOS_Start(); //开始任务调度,程序执行将阻塞在此,由内核接管调度
}
其中TaskSample()函数内容如下:
VOID TaskSampleEntry2(VOID)
{
while (1) {
printf("TaskSampleEntry2 running...\n");
(VOID)LOS_TaskDelay(2000); /* 2000 millisecond */
}
}
VOID TaskSampleEntry1(VOID)
{
while (1) {
printf("TaskSampleEntry1 running...\n");
(VOID)LOS_TaskDelay(2000); /* 2000 millisecond */
}
}
VOID TaskSample(VOID)
{
UINT32 uwRet;
UINT32 taskID1;
UINT32 taskID2;
TSK_INIT_PARAM_S stTask = {0};
stTask.pfnTaskEntry = (TSK_ENTRY_FUNC)TaskSampleEntry1;
stTask.uwStackSize = 0x1000;
stTask.pcName = "TaskSampleEntry1";
stTask.usTaskPrio = 6; /* Os task priority is 6 */
uwRet = LOS_TaskCreate(&taskID1, &stTask);
if (uwRet != LOS_OK) {
printf("Task1 create failed\n");
}
stTask.pfnTaskEntry = (TSK_ENTRY_FUNC)TaskSampleEntry2;
stTask.uwStackSize = 0x1000;
stTask.pcName = "TaskSampleEntry2";
stTask.usTaskPrio = 7; /* Os task priority is 7 */
uwRet = LOS_TaskCreate(&taskID2, &stTask);
if (uwRet != LOS_OK) {
printf("Task2 create failed\n");
}
}
适配完内核启动后,可以通过调试串口看到如下打印信息:

后续还需要对整个基础内核进行详细适配验证。
内核基础功能适配
内核基础功能适配项包括:中断管理、任务管理、内存管理、内核通信机制、时间管理、软件定时器,可以参考对应链接中的编程实例进行内核基础功能验证。在验证的过程中发现问题,针对相应问题进行具体的适配。
从上一节中打印信息输出时间间隔可以看出,LOS_TaskDelay函数的延时时间不准确,我们可以在target_config.h中定义如下宏进行内核时钟适配:
#define OS_SYS_CLOCK 168000000
#define LOSCFG_BASE_CORE_TICK_PER_SECOND (1000UL)
其它内核基础功能的适配方法大多也是围绕于target_config.h中的宏定义,需要大家配合//kernel/liteos_m下源码,自行尝试摸索,在此不做进一步讲解。
littlefs文件系统移植适配
Niobe407开发板外挂了16MB的SPI-FLASH,Niobe407基于该Flash进行了littlefs适配。
内核已经对littlefs进行了适配,我们只需要开启Kconfig中的配置,然后适配Littlefs如下接口:
int32_t LittlefsRead(const struct lfs_config *cfg, lfs_block_t block,
lfs_off_t off, void *buffer, lfs_size_t size)
{
W25x_BufferRead(buffer, cfg->context + cfg->block_size * block + off, size);
return LFS_ERR_OK;
}
int32_t LittlefsProg(const struct lfs_config *cfg, lfs_block_t block,
lfs_off_t off, const void *buffer, lfs_size_t size)
{
W25x_BufferWrite((uint8_t *)buffer,cfg->context + cfg->block_size * block + off,size);
return LFS_ERR_OK;
}
int32_t LittlefsErase(const struct lfs_config *cfg, lfs_block_t block)
{
W25x_SectorErase(cfg->context + cfg->block_size * block);
return LFS_ERR_OK;
}
int32_t LittlefsSync(const struct lfs_config *cfg)
{
return LFS_ERR_OK;
}
W25x_BufferRead等函数是spi-flash读写操作的接口,不同型号的spi-flash其实现也不同,Niobe407的SPI-Flash操作具体实现可参考//device/board/talkweb/niobe407/liteos_m/drivers/spi_flash/src/w25qxx.c
由于SPI已经hdf化了,而littlefs依赖于spi驱动,为了方便对文件系统进行配置,可以将littlefs的配置加入至.hcs文件中,具体参考://device/board/talkweb/niobe407/liteos_m/hdf_config/hdf_littlefs.hcs文件
misc {
littlefs_config {
match_attr = "littlefs_config";
mount_points = ["/talkweb"];
partitions = [0x800000];
block_size = [4096];
block_count = [256];
}
}
板级驱动移植
驱动适配相关文件放置在//drivers/adapter/platform中,对应有gpio,i2c,pwm,spi,uart,watchdog,都是通过HDF机制加载,本章节以pwm为例进行说明。
PWM驱动适配
在HDF框架中,PWM的接口适配模式采用独立服务模式,在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF DeviceManager的服务管理能力,但需要为每个设备单独配置设备节点。
- 接口说明
1. pwm open初始化函数:DevHandle PwmOpen(uint32_t num);
参数说明:
num: PWM设备编号。
return: 获取成功返回PWM设备句柄,失败返回NULL。
2. pwm close去初始化函数:void PwmClose(DevHandle handle);
参数说明:
handle: pwm设备句柄。
return: 无。
3. 设置PWM设备参数:int32_t PwmSetConfig(DevHandle handle, struct PwmConfig *config);
参数说明:
handle: pwm设备句柄。
*config 参数指针。
return: 返回0表示设置成功,返回负数表示失败。
- PWM HDF HCS配置文件解析
device_info.hcs文件位于//device/board/talkweb/niobe407/liteos_m/hdf_config/device_info.hcs,以下示例为使用TIM2、TIM3和TIM7定时器输出PWM信号:
device_pwm1 :: device {
pwm1 :: deviceNode {
policy = 2;
priority = 100;
moduleName = "ST_HDF_PLATFORM_PWM";
serviceName = "HDF_PLATFORM_PWM_1";
deviceMatchAttr = "config_pwm1";
}
}
device_pwm2 :: device {
pwm2 :: deviceNode {
policy = 2;
priority = 100;
moduleName = "ST_HDF_PLATFORM_PWM";
serviceName = "HDF_PLATFORM_PWM_2";
deviceMatchAttr = "config_pwm2";
}
}
device_pwm7 :: device {
pwm7 :: deviceNode {
policy = 2;
priority = 100;
moduleName = "ST_HDF_PLATFORM_PWM";
serviceName = "HDF_PLATFORM_PWM_7";
deviceMatchAttr = "config_pwm7";
}
}
hdf.hcs文件位于//device/board/talkweb/niobe407/liteos_m/hdf_config/hdf.hcs,在此文件中配置TIM定时器具体信息:
--- 注意:tim2-tim7、tim12-tim14时钟频率为84M,TIM1、TIM8~TIM11为168M,tim6和tim7不能输出pwm。
--- tim1~tim5、tim8有4个channel,tim9、tim12有2个channel,tim10、tim11、tim13、tim14只有1个channel。
pwm_config {
pwm1_config {
match_attr = "config_pwm1";
pwmTim = 1; --- 定时器ID tim2(0:tim1,1:tim2,...,tim6和tim7不可用)
pwmCh = 3; --- 对应channel数(0:ch1、1:ch2、2:ch3、3:ch4)
prescaler = 4199; --- 预分频数,例如tim2时钟为84M,(84M/(4199+1))=20khz,则以20khz为基准。
}
pwm2_config {
match_attr = "config_pwm2";
pwmTim = 2;
pwmCh = 0;
prescaler = 8399;
}
pwm3_config {
match_attr = "config_pwm7";
pwmTim = 7;
pwmCh = 0;
prescaler = 8399;
}
}
hdf pwm适配代码请参考://drivers/adapter/platform/pwm/pwm_stm32f4xx.c
hdf pwm使用示例可请参考://device/board/talkweb/niobe407/applications/206_hdf_pwm
子系统适配
OpenHarmony子系统适配一般包含两部分:
- 在
config.json中增加对应子系统和部件,这样编译系统会将该部件纳入编译目标中。 - 针对该部件的
HAL层接口进行硬件适配,或者可选的软件功能适配。
LWIP部件适配
LiteOS-M kernel通过Kconfig配置可以使lwip参与编译,并可以在kernel组件中指定lwip编译适配的目录。如下:
{
"subsystem": "kernel",
"components": [
{
"component": "liteos_m",
"features": [
"ohos_kernel_liteos_m_lwip_path = \"//device/board/talkweb/niobe407/liteos_m/lwip_adapter\"" --- 指定适配路径
]
}
]
}
在指定的编译适配目录中,通过#include_next "lwip/lwipopts.h"的方式入侵修改lwip三方库中头文件配置,关于有线以太网LWIP适配部分,后续会补充详细适配步骤,在此先不做深入讲解。
启动恢复子系统适配
启动恢复子系统适配bootstrap_lite和syspara_lite两个组件。请在//vendor/talkweb/niobe407/config.json中新增对应的配置选项。
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite",
"features": []
},
{
"component": "syspara_lite",
"features": []
}
]
}
适配bootstrap_lite部件时,需要在链接文件//device/board/talkweb/niobe407/liteos_m/STM32F407IGTx_FLASH.ld中手动新增如下段:
__zinitcall_bsp_start = .;
KEEP (*(.zinitcall.bsp0.init))
KEEP (*(.zinitcall.bsp1.init))
KEEP (*(.zinitcall.bsp2.init))
KEEP (*(.zinitcall.bsp3.init))
KEEP (*(.zinitcall.bsp4.init))
__zinitcall_bsp_end = .;
__zinitcall_device_start = .;
KEEP (*(.zinitcall.device0.init))
KEEP (*(.zinitcall.device1.init))
KEEP (*(.zinitcall.device2.init))
KEEP (*(.zinitcall.device3.init))
KEEP (*(.zinitcall.device4.init))
__zinitcall_device_end = .;
__zinitcall_core_start = .;
KEEP (*(.zinitcall.core0.init))
KEEP (*(.zinitcall.core1.init))
KEEP (*(.zinitcall.core2.init))
KEEP (*(.zinitcall.core3.init))
KEEP (*(.zinitcall.core4.init))
__zinitcall_core_end = .;
__zinitcall_sys_service_start = .;
KEEP (*(.zinitcall.sys.service0.init))
KEEP (*(.zinitcall.sys.service1.init))
KEEP (*(.zinitcall.sys.service2.init))
KEEP (*(.zinitcall.sys.service3.init))
KEEP (*(.zinitcall.sys.service4.init))
__zinitcall_sys_service_end = .;
__zinitcall_sys_feature_start = .;
KEEP (*(.zinitcall.sys.feature0.init))
KEEP (*(.zinitcall.sys.feature1.init))
KEEP (*(.zinitcall.sys.feature2.init))
KEEP (*(.zinitcall.sys.feature3.init))
KEEP (*(.zinitcall.sys.feature4.init))
__zinitcall_sys_feature_end = .;
__zinitcall_run_start = .;
KEEP (*(.zinitcall.run0.init))
KEEP (*(.zinitcall.run1.init))
KEEP (*(.zinitcall.run2.init))
KEEP (*(.zinitcall.run3.init))
KEEP (*(.zinitcall.run4.init))
__zinitcall_run_end = .;
__zinitcall_app_service_start = .;
KEEP (*(.zinitcall.app.service0.init))
KEEP (*(.zinitcall.app.service1.init))
KEEP (*(.zinitcall.app.service2.init))
KEEP (*(.zinitcall.app.service3.init))
KEEP (*(.zinitcall.app.service4.init))
__zinitcall_app_service_end = .;
__zinitcall_app_feature_start = .;
KEEP (*(.zinitcall.app.feature0.init))
KEEP (*(.zinitcall.app.feature1.init))
KEEP (*(.zinitcall.app.feature2.init))
KEEP (*(.zinitcall.app.feature3.init))
KEEP (*(.zinitcall.app.feature4.init))
__zinitcall_app_feature_end = .;
__zinitcall_test_start = .;
KEEP (*(.zinitcall.test0.init))
KEEP (*(.zinitcall.test1.init))
KEEP (*(.zinitcall.test2.init))
KEEP (*(.zinitcall.test3.init))
KEEP (*(.zinitcall.test4.init))
__zinitcall_test_end = .;
__zinitcall_exit_start = .;
KEEP (*(.zinitcall.exit0.init))
KEEP (*(.zinitcall.exit1.init))
KEEP (*(.zinitcall.exit2.init))
KEEP (*(.zinitcall.exit3.init))
KEEP (*(.zinitcall.exit4.init))
__zinitcall_exit_end = .;
需要新增上述段是因为bootstrap_init提供的对外接口,见//utils/native/lite/include/ohos_init.h文件,采用的是灌段的形式,最终会保存到上述链接段中。主要的服务自动初始化宏如下表格所示:
| 接口名 | 描述 |
|---|---|
| SYS_SERVICE_INIT(func) | 标识核心系统服务的初始化启动入口 |
| SYS_FEATURE_INIT(func) | 标识核心系统功能的初始化启动入口 |
| APP_SERVICE_INIT(func) | 标识应用层服务的初始化启动入口 |
| APP_FEATURE_INIT(func) | 标识应用层功能的初始化启动入口 |
通过上面加载的组件编译出来的lib文件需要手动加入强制链接。
如在 //vendor/talkweb/niobe407/config.json 中配置了bootstrap_lite 部件
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite"
},
...
]
},
bootstrap_lite部件会编译//base/startup/bootstrap_lite/services/source/bootstrap_service.c,该文件中,通过SYS_SERVICE_INIT将Init函数符号灌段到__zinitcall_sys_service_start和__zinitcall_sys_service_end中,由于Init函数是没有显式调用它,所以需要将它强制链接到最终的镜像。如下:
static void Init(void)
{
static Bootstrap bootstrap;
bootstrap.GetName = GetName;
bootstrap.Initialize = Initialize;
bootstrap.MessageHandle = MessageHandle;
bootstrap.GetTaskConfig = GetTaskConfig;
bootstrap.flag = FALSE;
SAMGR_GetInstance()->RegisterService((Service *)&bootstrap);
}
SYS_SERVICE_INIT(Init); --- 通过SYS启动即SYS_INIT启动就需要强制链接生成的lib
在//base/startup/bootstrap_lite/services/source/BUILD.gn文件中,描述了在//out/niobe407/niobe407/libs 生成 libbootstrap.a,如下:
static_library("bootstrap") {
sources = [
"bootstrap_service.c",
"system_init.c",
]
...
适配syspara_lite部件时,系统参数会最终写到文件中进行持久化保存。在轻量系统中,文件操作相关接口有POSIX接口与HalFiles接口这两套实现。
因为对接内核的文件系统,采用POSIX相关的接口,所以features字段中需要增加enable_ohos_startup_syspara_lite_use_posix_file_api = true。
如果对接HalFiles相关的接口实现的,则无须修改。
DFX子系统适配
进行DFX子系统适配需要添加hilog_lite和hievent_lite部件,直接在config.json文件配置即可。
{
"subsystem": "hiviewdfx",
"components": [
{
"component": "hilog_lite",
"features": []
},
{
"component": "hievent_lite",
"features": []
}
]
}
配置完成之后,需要注册日志输出实现函数,并加入编译。
bool HilogProc_Impl(const HiLogContent *hilogContent, uint32_t len)
{
char tempOutStr[LOG_FMT_MAX_LEN];
tempOutStr[0] = 0,tempOutStr[1] = 0;
if (LogContentFmt(tempOutStr, sizeof(tempOutStr), hilogContent) > 0) {
printf(tempOutStr);
}
return true;
}
HiviewRegisterHilogProc(HilogProc_Impl);
系统服务管理子系统适配
进行系统服务管理子系统适配需要添加samgr_lite部件,直接在config.json配置即可。
{
"subsystem": "systemabilitymgr",
"components": [
{
"component": "samgr_lite",
"features": []
}
]
}
在轻量系统中,samgr_lite配置的共享任务栈大小默认为2048。在适配时可以在features中,通过config_ohos_systemabilitymgr_samgr_lite_shared_task_size重新设置共享任务栈大小。
"config_ohos_systemabilitymgr_samgr_lite_shared_task_size = 4096"
安全子系统适配
进行安全子系统适配需要添加huks组件,直接在config.json配置即可。
{
"subsystem": "security",
"components": [
{
"component": "huks",
"features": [
"huks_use_lite_storage = true",
"huks_use_hardware_root_key = true",
"huks_config_file = \"hks_config_lite.h\"",
"huks_key_store_path = \"storage\""
]
}
]
}
huks部件适配时,huks_key_store_path配置选项用于指定存放秘钥路径,huks_config_file为配置头文件名称。
公共基础库子系统适配
公共基础库子系统适配添加了kv_store、file、os_dump组件,直接在config.json配置即可。
{
"subsystem": "utils",
"components": [
{
"component": "file",
"features": []
},
{
"component": "kv_store",
"features": [
"enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = false"
]
},
{
"component": "os_dump",
"features": []
}
]
},
与适配syspara_lite部件类似,适配kv_store部件时,键值对会写到文件中。在轻量系统中,文件操作相关接口有POSIX接口与HalFiles接口这两套实现。因为对接内核的文件系统,采用POSIX相关的接口,所以features需要增加enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = true。如果对接HalFiles相关的接口实现的,则无须修改。
HDF子系统适配
与启动恢复子系统适配类似,我们需要在链接文件//device/board/talkweb/niobe407/liteos_m/STM32F407IGTx_FLASH.ld中手动新增如下段:
_hdf_drivers_start = .;
KEEP(*(.hdf.driver))
_hdf_drivers_end = .;
然后,在kernel初始化完成后调用DeviceManagerStart函数,执行完成后,才能调用hdf接口控制外设。
#include "devmgr_service_start.h" --- 注意需要包含该头文件
#ifdef LOSCFG_DRIVERS_HDF
DeviceManagerStart();
#endif
devmgr_service_start.h头文件所在路径为: //drivers/framework/core/common/include/manager,为保证编译时能找到该头文件,需要将其加入到include_dirs中:
XTS兼容性测评子系统适配
产品兼容性规范
产品兼容性规范文档请参考 产品兼容性SIG介绍。
添加XTS子系统
XTS测试参考资料见 xts参考资料,进行XTS子系统适配需要添加xts_acts与xts_tools组件,直接在config.json配置即可,配置如下:
{
"subsystem": "xts",
"components": [
{
"component": "xts_acts",
"features": []
},
{
"component": "xts_tools",
"features": []
}
]
}
我们可以在xts_acts组件的features数组中指定如下属性:
config_ohos_xts_acts_utils_lite_kv_store_data_path配置挂载文件系统根目录的名字。enable_ohos_test_xts_acts_use_thirdparty_lwip表示如果使用thirdparty/lwip目录下的源码编译,则设置为true,否则设置为false。
编译XTS
在配置config.json后,使用hb build是不会去编译xts的,只有在debug版本编译时才会参与编译,并且需要我们强制链接需要进行测试的套件静态库。
在我们//device/board/talkweb/liteos_m下包含kernel_module的BUILD.gn 脚本中添加如下内容:
config("public") {
if (build_xts) {
lib_dirs = [ "$root_out_dir/libs" ]
ldflags += [
"-Wl,--whole-archive", --- 开启whole-archive特性,可以把在其后面出现的静态库包含的函数和变量输出到动态库
"-lbootstrap",
"-lbroadcast",
"-lhctest",
#公共基础库
# "-lmodule_ActsUtilsFileTest",
# "-lmodule_ActsKvStoreTest",
#DFX
"-lmodule_ActsDfxFuncTest",
"-lmodule_ActsHieventLiteTest",
#启动恢复
# "-lmodule_ActsBootstrapTest",
# "-lmodule_ActsParameterTest",
#分布式任务调度
# "-lmodule_ActsSamgrTest",
"-Wl,--no-whole-archive", --- 关掉whole-archive这个特性
]
}
}
由于Niobe407开发板内存有限,xts测试时需要分套件测试。执行如下编译命令,即可生成包含xts测试的固件。
hb build -f -b debug --gn-args build_xts=true
此外,我们还需要修改//vendor/talkweb/niobe407/hals/utils/sys_param/hal_sys_param.c文件,将这些字符串定义正确。
static const char OHOS_DEVICE_TYPE[] = {"Evaluation Board"};
static const char OHOS_DISPLAY_VERSION[] = {"OpenHarmony 3.1"};
static const char OHOS_MANUFACTURE[] = {"Talkweb"};
static const char OHOS_BRAND[] = {"Talkweb"};
static const char OHOS_MARKET_NAME[] = {"Niobe"};
static const char OHOS_PRODUCT_SERIES[] = {"Niobe"};
static const char OHOS_PRODUCT_MODEL[] = {"Niobe407"};
static const char OHOS_SOFTWARE_MODEL[] = {"1.0.0"};
static const char OHOS_HARDWARE_MODEL[] = {"2.0.0"};
static const char OHOS_HARDWARE_PROFILE[] = {"RAM:192K,ROM:1M,ETH:true"};
static const char OHOS_BOOTLOADER_VERSION[] = {"twboot-v2022.03"};
static const char OHOS_ABI_LIST[] = {"armm4_hard_fpv4-sp-d16-liteos"};
static const char OHOS_SERIAL[] = {"1234567890"}; // provided by OEM.
验证XTS
编译完成后,将固件烧录至开发板,xts全部跑完会有显示xx Tests xx Failures xx Ignored等信息,以下以公共基础库测试为例:
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:590:testKvStoreClearCache002:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:625:testKvStoreCacheSize001:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:653:testKvStoreCacheSize002:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:681:testKvStoreCacheSize003:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:709:testKvStoreMaxSize001:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:737:testKvStoreMaxSize002:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:765:testKvStoreMaxSize003:PASS
../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:793:testKvStoreMaxSize004:PASS
+-------------------------------------------+
-----------------------
32 Tests 0 Failures 0 Ignored
OK
All the test suites finished!
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN/733GH/overview
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
开发基础知识:
1.应用基础知识
2.配置文件
3.应用数据管理
4.应用安全管理
5.应用隐私保护
6.三方应用调用管控机制
7.资源分类与访问
8.学习ArkTS语言
9.……
基于ArkTS 开发
1.Ability开发
2.UI开发
3.公共事件与通知
4.窗口管理
5.媒体
6.安全
7.网络与链接
8.电话服务
9.数据管理
10.后台任务(Background Task)管理
11.设备管理
12.设备使用信息统计
13.DFX
14.国际化开发
15.折叠屏系列
16.……
鸿蒙开发面试真题(含参考答案):https://gitcode.com/HarmonyOS_MN/733GH/overview
OpenHarmony 开发环境搭建
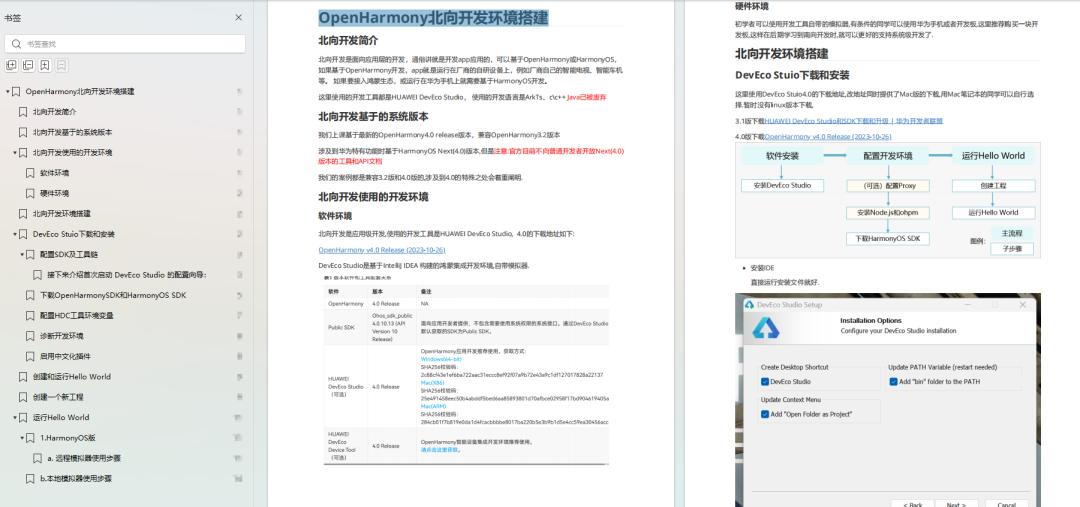
《OpenHarmony源码解析》:https://gitcode.com/HarmonyOS_MN/733GH/overview
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
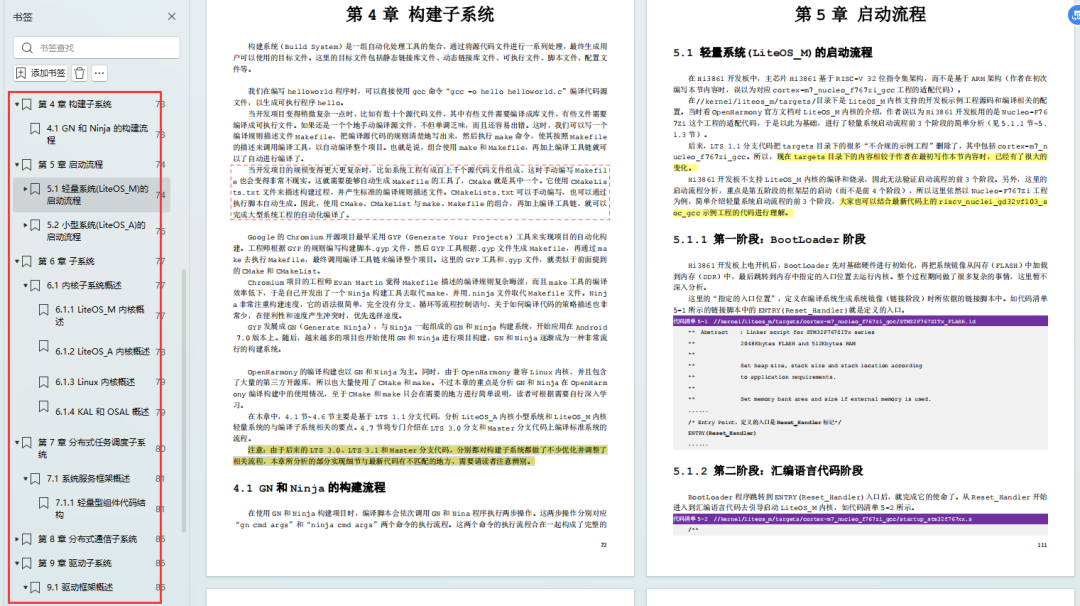
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN/733GH/overview


![[PICO VR眼镜]眼动追踪串流Unity开发与使用方法,眼动追踪打包报错问题解决(Eye Tracking)](https://i-blog.csdnimg.cn/direct/fad7c2a75699426e8b7fc3d80fa46e47.png)