1 传感器选型
1.1 传感器选型
6 axis:Bosch BMI160(比较差),InvenSense MPU6050(DMP),ST LSM6Dxx
Acc: Freescale MMA7450L (MicroMachined Accelerometer/MC Multi-Axis, iMX31), Kionix KXSD9, ST LIS3DH
Magnetic:AKM / ALPS / memsic
Gyro:ST,BMG160(包含FIFO模式)
Pedometer:DS3553,MMA9553L,STP201,ucomm提供计步算法
Pressure(barometer):Bosch BMP(差),Global mems
1.2 sensor hub
1.2.1 Bosch BHI160
ARC EM4 CPU.
1.2.2 Cywee CMH1000
Cywee CMH1000 sensor hub (tensilica CPU, 224KB DRAM, 336KB IRAM, SRAM 1V) is designed by Realtek, software is designed by Cywee.
1.2.3 14nm APL A39X0 ISH
ISH integrated Intel Lakemont MCU, based on Intel Pentium CPU (586), also used by Intel 32nm Quark SE C1000. ISH runs Viper RTOS. Refer to Atom-x5/x7 series processor, codenamed Cherry Trail.
2 Accelerometer
2.1 基本原理
加速度计算公式:(16bit_ADC / 32768) * 量程,16bit_ADC的最高一位是符号位,量程选项有正负2g、正负4g、正负8g、正负16g。
例如量程取正负2g,那么计算公式是 (((signed short)16bit_ADC) / 0x8000) * (2 * 9.8)
低通滤波:多个采样值取平均值
Sensors 报点时的时间戳单位是ms。
2.2 如何判断ACC校准PASS
The norm of accelerometer coordiate value should be close (0, 0, +9.8) (m/s^2), when device Z-axis faces sky direction.
we have to calculate bias value that makes accelerometer coordiate value close the norm for each device.
How to get accelerometer bias value:
xdata[0:99] = xraw[0:99] + x_pervious_bias;
ydata[0:99] = yraw[0:99] + y_pervious_bias;
zdata[0:99] = zraw[0:99] + z_pervious_bias;
x_newbias = (xdata[0]+..+xdata[99])/100;
y_newbias = (ydata[0]+..+ydata[99])/100;
z_newbias = ((zdata[0]+..+zdata[99])/100);
if (absf(x_newbias) > 0.39f)
return (x_newbias = 0.0f); /*that means bias value is not met criterion*/
if (absf(y_newbias) > 0.39f)
return (y_newbias = 0.0f); /*that means bias value is not met criterion*/
if ((absf(z_newbias) > 10.2f) || (absf(z_newbias) < 9.0f)))
return (z_newbias = 0.0f); /*that means bias value is not met criterion*/
2.3 Pedometer
人步行过程中,加速度三轴平方和后开根号大概呈现正弦波,每一个周期算一步。每秒步频就是正弦波的频率。区分行走还是跑步可以通过波峰的值来区分(跑步时,每秒步频也会变快),值大于2g认为在跑步(异常情况是:大于等于2.8g一般认为是跌倒了),值在[1.2g, 2g]之间认为是行走,小于1.2g认为是静态,不进行计步。
accumulated_step_count/步数:总共走或跑的步数 (unit: 步)
accumulated_step_length:所有步幅的总和,即所走的路程(unit:meter)
step_frequency/步频:每分钟走或跑的步数 (unit: 步/分钟)
step_length/步幅:每步的步长 (unit: centimeter)
step_type: 1 for walk, 2 for run, and 3 for jogging
配速的单位是min/KM,即为每公里的用时。
DirectionUp:加速度sqrt(x*x + y*y + z*z) 不断增加,往波峰爬坡
DirectionDown:加速度sqrt(x*x + y*y + z*z) 不断减少,往波谷下坡
2.4 根据加速度计算Azimuth-Pitch-Roll姿态角做跌倒检测
Gyro 绕z轴旋转的叫Azimuth(航向角,又叫Yaw或者Heading),绕x轴旋转的叫Pitch(俯仰),绕y轴旋转的叫Roll(翻滚,3个单词记忆缩写为APR),加速度只能计算出Pitch和Roll,航向角Azimuth必须通过Gyro或者Mag计算
ρ、ψ、θ分别为传感器的xyz轴与重力加速度的夹角。传感器3个轴输出的加速度信号Ax、Ay、Az与重力加速度方向形成的夹角计算公式如下:
3 Gyro(陀螺仪)
3.1 基本原理
unit: deg/s或者dps(degree per second)
陀螺仪计算公式:(16bit_ADC / 32768) * 量程,16bit_ADC的最高一位是符号位,量程选项有正负125dps、正负250dps、正负500dps、正负1000dps、正负2000dps。
例如量程取正负2000dps,那么计算公式是 (((signed short)16bit_ADC) / 0x8000) * 2000
陀螺仪耗流一般比较大,可达1mA。
陀螺仪的XYZ分别代表设备围绕XYZ三个轴旋转的角速度:deg/second。XYZ使用的坐标系与gsensor相同。Gyro校准时,X或者Y或者Z > 0.4會判fail。
azimuth方位角(PDR中叫heading):就是绕z轴转动的角度(顺时针为正),0度=正北,(假设Y轴指向地磁正北方);90度=正东;180度=正南;270度=正西。
pitch仰俯:绕X轴转动的角度(-180<=pitch<=180), 如果设备水平放置,前方向下俯就是正;前方向上仰就是负值。
roll滚转:绕Y轴转动(-90<=roll<=90),向左翻滚是正值。
Sample Rate(Output Data Rate,ODR):
ACC:50/100 Hz(PDR和指南针用100 Hz,其它场景切换到50 Hz)
MAG:25 Hz
GRYO:100 Hz
poll_interval为轮训周期,即odr输出速率的倒数1000 / odr(单位是ms)
DCM:Direction Cosine Matrix(参看四元数与旋转矩阵)
3.2 角速率零点漂移
将陀螺仪放置在水平的桌面上,读出(x0, y0, z0)这3个值,即为3个轴的0点漂移;运动状态读出的值(x, y, z)需要减去0点漂移的值,再做离散点积分计算。
零点漂移不断修正的公式:
gOffset = EMAOFFSET * gyroRaw + (1 - EMAOFFSET) * gOffset;
gyroSpeed = gyroRaw - gOffset;
gAngleGlobal += gyroSpeed * tInterval;
gyroAngle = gAngleGlobal;
其中EMAOFFSET = 0.0005
说明漂移也一直在修正。
3.3 陀螺仪积分
陀螺仪积分原理是使用离散点积分,根据ODR(Output Data Rate)的倒数,可以算出2个点的时间间隔(dt = 1 / ODR),将读取到的x或者y或者z减去offset(0点漂移)后乘以时间间隔(dt = 1 / ODR)即是2点之间的积分,加上上一次的旋转角度,就是新的角度。
例子:
#include <Wire.h>
#include <L3G4200D.h>
#define EMAoffset 0.05
#define Gyr_Gain 0.076335877862595 // 1/131,250dps
float angleG;
float G_offset;
float gyroSpeed;
unsigned long timer = 0;
L3G4200D gyro;
void setup() {
Serial.begin(9600);
Wire.begin();
gyro.enableDefault();
delay(500);
}
void loop() {
long o_timer = timer;
timer = millis();
int dt = timer - o_timer;
gyro.read();
G_offset = EMAoffset *(gyro.g.x - 55) / 131 + (1-EMAoffset) * G_offset;
gyroSpeed = (gyro.g.x - 55) / 131 - G_offset;
angleG = angleG + gyroSpeed * dt / 1000;
Serial.print("angle_x: ");
Serial.print(angleG,6);
Serial.println(";");
delay(100);
}
积分运算的累积误差:
PITCH/ROLL角速度积分->PITCH/ROLL姿态角,再结合加速度纠正累积误差。
AZIMUTH(YAW)角速度积分->方向角,再结合地磁传感器、GPS纠正累积误差。
4 Magnetic(磁力计)
4.1 基本原理
unit:microtesla
寄存器读出来的16bit_ADC值 (x, y, z),16bit_ADC是无符号数,换算成uT,分成3步。
第一步,无符号的16bit_ADC值范围是[0,65536],转换到有符号数,就是16bit_ADC-32768后的,范围就是[-32768,32768]
第二步,得出Gauss:((16bit_ADC - 32768)/ 1024),就是1Gauss的变化,需要ADC的值变化1024
第三步,得出uT:((16bit_ADC - 32768)/ 1024) * 100
地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如下图所示。
实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以计算出航向角。当罗盘水平旋转的时候,航向角在0°- 360°之间变化。
磁力计会上报 (x, y, z, accuracy),其中accuracy的范围在0-3之间,数字越大越精确,低了需要做8字校准。
采集地磁三个轴的数据,通过画八字的形式,用MATLAB做个空间球,未校准的数据是个椭球,校准后就是个球了。椭球或者球对应点的直径(三个轴的合成磁场强度)是sqrt(x*x + y*y + z*z)。
4.2 方位传感器(Orientation Sensors)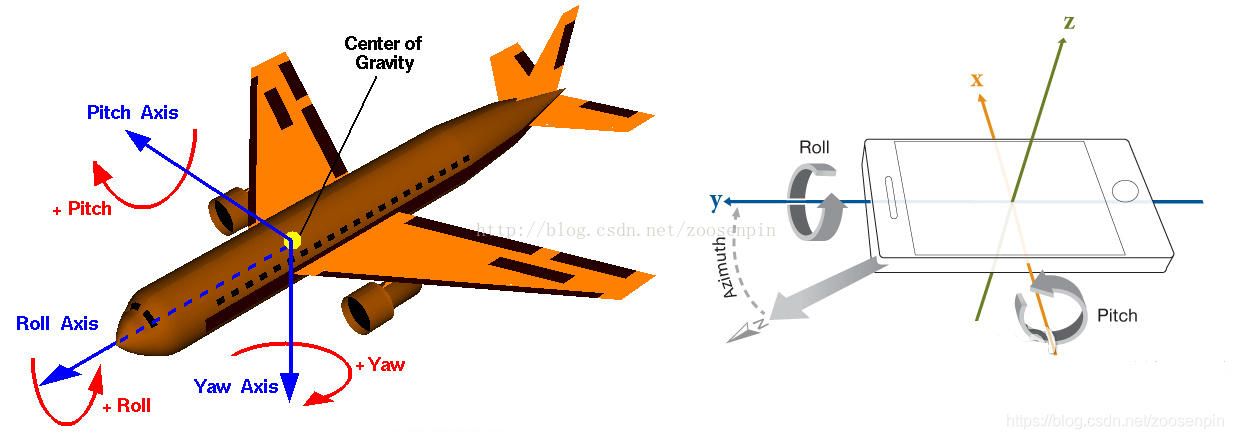
Android指南针应用就是用的这个类型。
这个传感器是virtual sensor,是通过Magnetic的 (x, y, z, accuracy) 计算出来的,其中azimuth作为指南针应用的指针方向来源。
azimuth方位角(PDR中叫heading):就是绕z轴转动的角度(顺时针为正),0度=正北,(假设Y轴指向地磁正北方);90度=正东;180度=正南;270度=正西。
pitch仰俯:绕X轴转动的角度 (-180<=pitch<=180), 如果设备水平放置,前方向下俯就是正;前方向上仰就是负值。
roll滚转:绕Y轴转动(-90<=roll<=90),向左翻滚是正值。
Android上报的3个数据格式如下所示(APR):
values[0]:azimuth, rotation around the Z axis
values[1]:pitch, rotation around the X axis
values[2]:roll, rotation around the Y axis
5 IoT
5.1 心率
5.1.1 光学HRM
HRM:心率监控,单位是Beats Per Minute,每分钟心跳次数
IC:台湾原相
光学传感器(2个绿光LED和一个红外LED)会产生PPG1和TOUCH两个数据,基于这2个数据,计算得出HRM和TAKE_OFF数据。
HRM融合了G-sensor和光学传感器PPG1的数据。
TAKE_OFF(从手腕上脱下手表)检测是用G-sensor和红外TOUCH的数据计算而得。
SLEEPING检测是用G-sensor与HRM数据计算而得。
5.1.2 ECG
ECG:美国叫EKG,心电图,双电极技术
IC:NeuroSky(神念科技)BMD101
aVR:augmented Voltage Right Hand,心电导联的一种接法
医疗器械三巨头:GE、飞利浦、西门子(GPS)
穿戴类ECG仅显示单通道心电图(第一导联,Lead I ECG)
5.1.3 HRV
HRV是指Heart Rate Variability(心率变异性),HRV的单位是ms(毫秒),HRV特指心跳时间间隔的微小变化。心率变异性变化越大,表明自主神经系统对身体协调作用越好、身体具备更多的活力。测量心率变异性(HRV)可以直观反映一个人的身体健康状况,并且也能够判断目前的训练方式对改善身体状态是否有效。
5.2 Pressure
气压计的单位hPa(hundred Pa,Android就是用这个:hardware/*/sensors.h),100帕斯卡
0.12 hPa = 1米
5.3 ADR
heading:是飞行中飞机头所指向的方向,它从真北向顺时针用度数度量。
5.4 PDR
根据GPS输入的值(经度,维度,地面速度m/sec,定位精度GPACCURACY,真北True方位角-顺时针为正),sensorhub或者sensor fusion库返回经度和维度作为PDR的输出值。一般情况是GPS喂一次数据,sensorhub预测并给出接下来的几个GPS点。GPS不喂数据,sensorhub也不吐数据。
Cywee CMH1000 sensorhub(224KB DRAM,336KB IRAM,SRAM电压是1V)带有这个算法。
[1st-Apr-2022]
CMH1000 IC is designed by Realtek, software is designed by Cywee.
5.5 Sedentary reminder
Probability of sedentary reminder(久坐提醒), the value range is from 0 to 100.
久坐一般由MMI层预设一个时间下到sensorhub中去,时间unit: minute
久坐的算法:一般是如果在触发时间到之前(譬如1小时),有累计行走一分钟就会解除久坐,并重新计算时间(还是按照1小时计算)。
5.6 Sleep
5.6.1 Sleep Cycle
睡眠监测过程分为:Awake、Light Sleep、Deep Sleep、REM(清醒、轻度睡眠、深度睡眠和快速动眼睡眠)
Sleep Cycle:睡眠质量(百分数),(快速动眼睡眠 + 深度睡眠) / 总睡眠
夜晚会翻身的那些时间就是睡眠质量不好(Light Sleep)的时间,算法将它扣除后,剩下的就是实打实睡眠质量好(快速动眼睡眠 + 深度睡眠)的时间段。
5.6.2 算法
主要判断入睡和出睡满足的条件。
包括SLEEP和SLEEP_STAGING(SLEEPING)
SLEEP:纯粹由G-sensor的数据计算而得
SLEEP_STAGING(SLEEPING):融合了G-sensor、光学传感器PPG1和BISI(Beat Interval and Signal Integrity detection)的数据;半小时以上的低运动量才会触发SLEEP_STAGING测量人的睡眠状态(进入睡眠、浅度睡眠、深度睡眠、状态切换或起床、结束睡眠);睡眠数据的几种状态都存储在sensorhub中(起床时会集中一次上报),如果中途有起床方便之类的(这个也会报一次数据),只要时间不大于30分钟,算法会认为仍然是一次睡眠过程,将起床前后的2个时间段一起计算睡眠数据。
SLEEPING算法需要data-time,这个需要每天都写入SLEEPING算法中。
睡眠状态值:
0:入睡,enter sleep
1:浅睡,light sleep
2:深睡,deep sleep
3:清醒或翻身,awake/stat change
4:出睡,leave sleep
5.7 Watch Hand up and down
抬手亮屏,与之相类似的还有Android tilt和wrist传感器。
有2种实现方式:
- 使用ACC实现,需要分左右手,功耗较小
- 使用GYRO实现,不分左右手,功耗较大,很多GYRO启动后,最大耗流能达到1mA
5.8 血氧计
oximeter:血氧饱和度(SpO2)是医学界最新确立的衡量人体健康与否的指标,用于标注动脉血液中氧合血红蛋白占总血红蛋白的比值。健康人群的血氧饱和度普遍在94%以上,脉搏在60到100之间。
代码中一般使用PPG2表示,PPG1表示的是光学心率的原始数据。一般使用红光LED来测量。
5.9 颗粒物传感器
测量颗粒物的等效粒径及单位体积内不同粒径的颗粒物数量。
主要输出数据一是PMx.x下的浓度,单位是ug/m3;二是表示0.1升空气中直径在x.x微米以上颗粒物个数。
5.10 湿度传感器
绝对湿度:每立方米大气所含水汽的克数来表示,单位为g/m3。
相对湿度:通常把大气的绝对湿度跟当时气温下饱和水汽压的百分比称为大气相对湿度,用%RH(Relative Humidity)表示,若大气中所含水汽的压强等于当时气温下的饱和水汽压时,这是大气的相对湿度等于100%RH。
6 Android平台Sensor
6.1 Linux domain socket抓包工具
socat -t100 -x -v UNIX-LISTEN:/tmp/php-fpm.sock.socat,mode=777,reuseaddr,fork UNIX-CONNECT:/tmp/php-fpm.sock 2>/data/my_socket.log &
/tmp/php-fpm.sock is created by Android deamon
/tmp/php-fpm.sock.socat is created by socat
Framework or client APPs connect to /tmp/php-fpm.sock.socat
-t<timeout> wait seconds before closing second channel
-x verbose data traffic, hexadecimal
-v verbose data traffic, text
6.2 MSM SSC
加速度、陀螺仪等数据量较大的最好使用FIFO(batch)模式,光线、距离等数据有变化才需要上报的传感器使用DRI(Data Ready Interrupt)模式。
SSC(Snapdragon Sensors Core)中带有uimg(__attribute__((section ("text.SMGR"))))标识的代码运行在缓存中,其中代码一般是做数据上报相关工作的,运行期间可以将外部ddr关闭以实现最低功耗的传感器运行;不带有uimg标识的代码运行期间是需要ddr开启的,其中代码一般做一些初始化相关的工作。
SAM: Sensors Algorithm Manager
SEE: Sensors Execution Environment
SLPI: Sensor Low Power Island
SSC: Snapdragon Sensors Core, used by aDSP
aDSP: qcom audio DSP
cDSP: qcom compute DSP
mDSP: qcom modem DSP
sDSP: qcom sensor DSP, SLPI
6.3 Debug方式
dumpsys sensorservice
dumpsys sensorservice data_injection APK_NAME
7 Abbreviations
7.1 General
AHRS:Automatic Heading Reference System,自动航向基准系统,广泛应用于四轴飞行器上
BISI:Beat interval (BI) and signal integrity (SI) detection. The BI is computed based on subtracting the peak position of the successive PPG beats. The SI is an indicator to identify the PPG signal integrity.
DDF:Device Driver Framework
EEG:Electroencephalography (EEG) is an electrophysiological monitoring method to record electrical activity of the brain.
EKG:Electrocardiography (ECG or EKG) is the process of recording the electrical activity of the heart over a period of time using electrodes placed on a patient's body.
EMG:Electromyography (EMG) is an electrodiagnostic medicine technique for evaluating and recording the electrical activity produced by skeletal muscles.
FSR:Full Scale Ranges,满量程范围
GSR:Galvanic skin response (GSR) is an electrophysiological monitoring method to record conductance of the skin.
HRV:Heart Rate Variability,心率变异性,需要ECG测量加算法
IMU:Inertial Measurement Units
MPU6050 DMP:Digital Motion Processing,数字运动处理器
ODR:Output Data Rate,for sensors sample rate(poll_interval = 1 / ODR),或者Output Data Register(STM32 GPIO)
PDR:Pedestrian dead reckoning, calculating one's current position by using a previously determined position or fix, and advancing that position based upon known or estimated speeds over elapsed time and course.
PPG:Photoplethysmogram (PPG) is an optical volumetric measurement of an organ. By illuminating skin with LED, the PPG is measured from the light transmitted or reflected to photodiode.
7.2 Sensors Part Number
7.2.1 Bosch
BHI160B:Bosch Sensor Hub with MEMS IMU 160B
BMA355:Bosch 3-Axis MEMS Accelerometer 355
BMI160:Bosch 6-Axis MEMS IMU 160
7.2.2 ST
AIS328DQ:Automotive Inertial Sensor - 3 axes - 2/4/8g full scale - Digital Output - QFPN package
A3G4250D:Automotive - 3 axes - Gyroscope - 4x4 LGA 16L - 245dps full scale - Digital Output
L3G4200D:Linear - 3 axes - Gyroscope - Digital Output
LIS3DH:Linear Inertial Sensor - Digital Output - High Level
LPS001DL:Linear Pressure Sensor - Digital Output - Low Level
LSM303DLH:Linear Sensor Module - Digital Output - High Level
Android以及IoT设备传感器软件开发总结
news2026/3/15 12:42:06
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2124268.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

渣土车检测数据集 2600张 渣土车 带标注 voc yolo
数据集名称:
渣土车检测数据集 数据集规模:
图像数量:2600张标注类型:渣土车检测格式兼容性:支持VOC和YOLO标注格式
数据集内容: 该数据集主要用于训练和评估计算机视觉模型,特别是在渣土车&…

如何本地部署AI智能体平台,带你手搓一个AI Agent
今天分享如何在个人电脑上搭建一个AI智能体平台,可以自定义聊天机器人,设计智能体,编排工作流,知识库,RAG管道等等,还支持本地大模型接入,并对外提供API接口。
如搭建过程有疑问,可…


工厂方法模式和抽象工厂模式
工厂方法模式
一个工厂只能创建一种产品
工厂方法模式的结构 工厂方法模式包含以下4个角色
Product(抽象产品)
ConcreteProduct(具体产品)
Factory(抽象工厂)
ConcreteFactory(具体工厂…

一篇文章带你看懂住宅代理如何实现内容过滤
在网络安全中,内容过滤是用户隐私保护的重要组成部分,将不良内容拦截在安全网之外是内容过滤的重中之重。在当下,住宅代理作为异军突起的网络安全工具,在内容过滤上有着不错的表现。本文将深入探讨住宅代理如何实现内容过滤&#…

数据权限的设计与实现系列8——前端筛选器组件Everright-filter集成框架开发1
背景
前面我们对筛选器组件进行了功能探索和技术验证,接下来就开始着手集成工作,融入一二三开发平台,打通前后端,最终让数据权限控制功能落地。 整体集成工作比较复杂,我们遵循由易到难的原则,先搭建出完整…


Leetcode3266. K 次乘运算后的最终数组 II
Every day a Leetcode
题目来源:3266. K 次乘运算后的最终数组 II
解法1:3266. K 次乘运算后的最终数组 II
用最小堆手动模拟操作,直到原数组的最大值 mx 成为这 n 个数的最小值。
设此时还剩下 k 次操作,那么:
对…
HarmonyOs DevEco Studio小技巧11--AI插件
AI智能辅助编程工具
CodeGenie 简介 DevEco AI辅助编程工具(CodeGenie)为开发者提供高效的应用/服务AI辅助编程工具,支持HarmonyOS NEXT领域的智能知识问答、ArkTS代码补全/生成和万能卡片生成能力,提高开发者编码效率。
文档中…

mysql整体架构描述
文章目录 数据库架构示意图1. 连接层2. 服务层3. 存储引擎层4. 文件系统层5. 系统层主要特性 数据库文件格式InnoDB 存储引擎文件类型及用途 MyISAM 存储引擎文件类型及用途 其他文件类型文件内容示例表结构文件示例 (.frm)InnoDB 数据文件示例(.ibd)MyI…

(十四)、为 SpringCloud 项目生成 Docker 镜像
文章目录 1、原理2、最佳实践2.1、获得 SpringCloud 微服务启动模块的 jar 文件2.2、准备文件夹和 Dockerfile 文件2.3、 Dockerfile 文件的内容2.4、通过命令行构件新镜像 3、异常情况和处理:failed to create LLB definition3.1、现象3.2、解决配置国内镜像仓库清…

【Python报错已解决】 ModuleNotFoundError: No module named ‘tensorboard‘
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《C干货基地》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! 文章目录 前言一、问题描述1.1 报错示例1.2 报错分析1.3 解决思路 二、解决方法2.1 方法一:使用pip安装TensorBoard…

vue3.0 使用echarts与echarts-gl 实现3D饼图
效果 安装echarts npm install echarts npm install echarts-gl 3d饼图组件:
<template><div style"width: 100%; height: 100%" ref"echart"></div>
</template><script setup>
import { reactive, ref, onMou…

docker部署FastDFS文件系统详细记录,每个步骤都有详细记录。含linux和windows双系统安装教程
docker部署FastDFS文件系统详细记录 参考文章docker搭建FastDFS文件系统(最详细版) 文章里所有步骤由作者亲自测试,所以和 原文有不少差异 文章里所有步骤由作者亲自测试,所以和 原文有不少差异 文章里所有步骤由作者亲自测试&…

HTML + CSS - 网页布局之一般布局浮动布局
1. 一般布局
1.1 一般布局相关参数
元素内容常常可以想像为放在一个盒子里,然后在周边加上内边距,边框和外边距,是盒子模型
默认一个块级区域会填充父类所有的行向空间,并且沿着块伸长容纳其内容,可以为块状体设置某…

18、公司信贷管理|贷款额度的测算|贷款期限及其定价的设定逻辑!
银行在综合权衡贷款的第一还款来源和第二还款来源、风险和收益的基础上,应明确提出贷与不贷的意见。经调查审查同意的贷款,应提出最终的融资方案。
合理的融资方案既要有利于提升本行的竞争力,又要有利于控制贷款风险。完整的融资方案一般包…

苹果的“AI茅”之路只走了一半
今年苹果发布会最大的亮点,也许是和华为“撞档”,又或者是替腾讯“发布”新手游,但肯定不是iPhone 16。
9月10日,苹果秋季新品发布会与华为见非凡品牌盛典相继举行,iPhone 16系列也与HUAWEI Mate XT同日发布。
不过&…

性能测试-jmeter脚本录制(十五)
一、jmeter脚本录制(不推荐)简介: 二、jmeter脚本录制步骤
1、添加代理服务器和线程组
2、配置http代理服务器的端口和目标线程组
3修改本机浏览器代理
4、点击启动
5、每次操作页面前,修改提示文字

html 中如何使用 uniapp 的部分方法
示例代码:
<!DOCTYPE html>
<html lang"en">
<head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title><…