文章转载自机器视觉应用基础: 工业镜头-工业相机镜头选型-少有人走的路 (skcircle.com)
工业镜头相当于人眼的晶状体,如果没有晶状体,人眼看不到任何物体;如果没
有镜头,那么摄像头所输出的图像;就是白茫茫的一片,没有清晰的图像输出,这与
我们家用相机和照相机的原理是一致的。
当人眼的肌肉无法将晶状体拉伸至正常位置时,也就是人们常说的近视眼,眼前
的景物就变得模糊不清;摄像头与镜头的配合也有类似现象,当图像变得不清楚时,
可以调整摄像头的后焦点,改变 CCD 芯片与工业镜头基准面的距离,可以将模糊的
图像变得清晰。
3.1 镜头基本概念
3.1.1 物理结构
镜头由多个透镜、光圈和对焦环组成。镜头中的玻璃镜片是镜头的核心。但是只
有玻璃镜片也没有用,光圈控制与对焦机构是镜头组成另外两个重要机构。镜头的光
圈可以分为固定光圈和可变光圈,其中可变光圈又可分为自动光圈和手动光圈。同样
的,对焦机构也有手动和自动之分。
如下图所示,在使用时由操作者观察相机显示屏来调整可变光圈和焦点,,以确保
图像的明亮程度及清晰度。

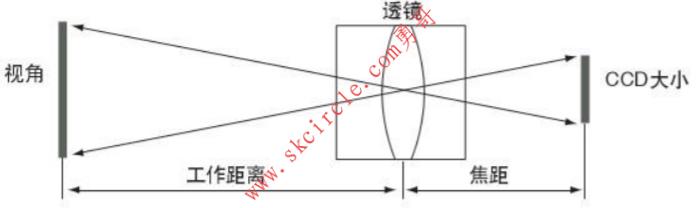
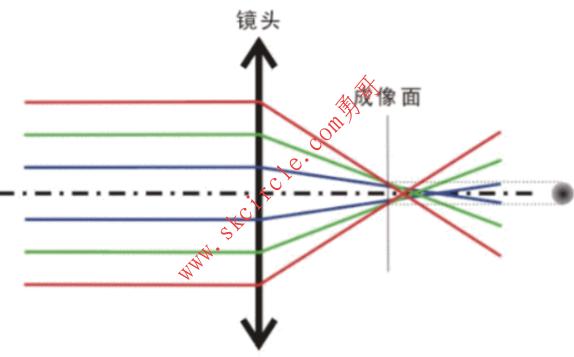
3.1.2 光学结构
任何一个复杂的透镜组合都可以等效为一个简单的透镜,光经过透镜的传播路线
可以简单的画作下图:
3.1.3 光学尺寸
一般指镜头设计时,能够适配的最大的图像传感器尺寸(对角线),一般按照传感
器尺寸进行描述,如 1”、2/3”、1/2”等,如果相机传感器尺寸大于镜头设计最大
尺寸,则会在画面四个角形成暗影或黑角。
3.1.4 接口分类
镜头和相机之间的接口有许多不同的类型,工业相机常用的包括 C 接口、CS 接
口、F 接口、V 接口、T2 接口、徕卡接口、M42 接口、M72 接口等。接口类型的不同
和镜头性能及质量并无直接关系,只是接口方式的不同,一般可以也找到各种常用接
口之间的转接口。
C 接口和 CS 接口:工业相机最常见的国际标准接口,为 1 英寸-32UN 英制螺纹
连接口,C 型接口和 CS 型接口的螺纹连接是一样的,区别在于 C 型接口的后截距为
17.5mm,CS 型接口的后截距为 12.5mm。所以 CS 型接口的相机可以和 C 口及 CS 口
的镜头连接使用,只是使用 C 口镜头时需要加一个 5mm 的 C-CS 转接环;C 型接口
的相机不能用 CS 口的镜头。
F 接口镜头:尼康镜头的接口标准,所以又称尼康口,也是工业相机中常用的类
型,一般相机靶面大于 4/3 英寸时需用 F 口的镜头。
V 接口镜头:著名的专业镜头品牌施奈德镜头所主要使用的标准,一般也用于相
机靶面较大或特殊用途的镜头。
T 接口镜头拥有较长的后截距,因此可以通过换接口来用在所有牌子的单反机身
上,通用性极强。
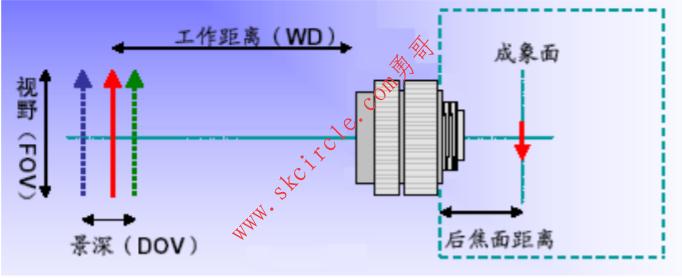
3.1.5 工作距离(Working Distance,WD)
工作距离指的是镜头第一个面到所需成像物体的距离。它与视场大小成正比,有
些系统工作空间很小因而需要镜头有小的工作距离,但有的系统在镜头前可能需要安
装光源或其它工作装置因而必须有较大的工作距离保证空间。
3.1.6 焦距(f)
焦距是指镜头的光学中心(光学后主点)到成像面焦点的距离。平行光通过镜头
后汇聚于一点,这个点就是所说的焦点。焦距不仅仅描述镜头的屈光能力,且可作为
图像质量的参考。一般镜头失真随着焦距的减小而增大,因而选择测量镜头,不要选
择小焦距(小于 8mm)或大视场角的镜头。
3.1.7 视场角
在光学系统当中,以镜头为顶点,以被测物体通过镜头的最大成像范围的两边缘
构成的夹角叫做视场角。视场角的大小决定了镜头的视野范围,视场角越大,视野就
越大,光学倍率也就越小。焦距越长,视场角就越窄;焦距越短,视场角就越宽。
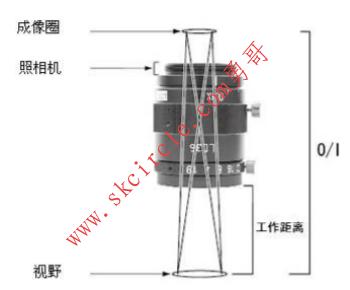
3.1.8 视野(Field of View,FOV)
镜头将被测物体和它周围的环境,投影在相机的图像传感器平面上,在图像上形
成一个矩形的成像面,和成像面中的图像对应的物体平面被称作视野。
3.1.9 弥散圆
光轴平行的光线射入凸透镜时,理想的镜头应该是所有的光线聚集在一点后,再
以锥状的扩散开来,这个聚集所有光线的一点,就叫做焦点。在焦点前后,光线开始
聚集和扩散,点的影像变成模糊的,形成一个扩大的圆,这个圆就叫做弥散圆。
3.1.10 景深 (DOF)
镜头对着某个物体聚焦清晰时,都可以在胶片或者接收器上相当清晰的结像,在
这个平面沿着镜头轴线的前面和后面一定范围的点也可以结成较清晰的像点,这前后
两个平面之间的距离叫景深。景深表示在垂直镜头光轴轴线的同一平面内的点,满足
图像清晰度要求的最远位置与最近位置的差值。
在现实当中,观赏拍摄的影像是以某种方式(比如投影、放大成照片等等)来观察
的,人的肉眼所感受到的影像与放大倍率、投影距离及观看距离有很大的关系,如果
弥散圆的直径小于人眼的鉴别能力,在一定范围内实际影像产生的模糊是不能辨认的。
这个不能辨认的弥散圆就称为容许弥散圆。在焦点的前、后各有一个容许弥散圆。
以相机拍摄者为基准,从焦点到近处容许弥散圆的距离叫前景深,从焦点到远方
容许弥散圆的距离叫后景深。
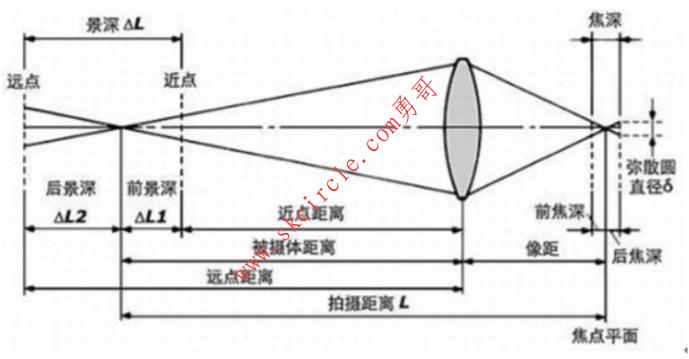
景深的计算公式:
前景深ΔL1=FδL2/(f2+FδL) (1)
后景深ΔL2=FδL2/(f2-FδL) (2)
景深ΔL=ΔL1+ΔL2=(2f2FδL2)/(f4-F2δ2L2)
其中:δ——容许弥散圆直径,f ——镜头焦距,F——镜头的拍摄光圈值,L——
对焦距离,ΔL1——前景深,ΔL2——后景深,ΔL——景深
从公式(1)和(2)可以看出,后景深>前景深,且景深与镜头使用光圈、镜头焦距、
拍摄距离以及对像质的要求(表现为对容许弥散圆的大小)有关。这些主要因素对景深
的影响如下(假定其他的条件都不改变):
镜头光圈:光圈越大,景深越小;光圈越小,景深越大;
镜头焦距:镜头焦距越长,景深越小;焦距越短,景深越大;
拍摄距离:距离越远,景深越大;距离越近,景深越小。
3.1.11 相对孔径
一般的镜头都是由多片镜片组合而成,的光线经过这些镜片到达成像面时,并不
是所有的光线都能通过,而是有一部分被阻挡了,就好像光线通过一个孔,孔越大,
通过的光线越多,在像平面上所成的像越亮,这个圆孔的直径就是有效孔径,有效孔
径和焦距的比值叫相对孔径。
3.1.12 光圈系数(F/#)
光圈系数是镜头的重要内部参数,它就是镜头相对孔径的倒数,光圈系数的标称
值数字越大,也就表示其实际光圈就越小。一般的厂家都会用 F 数来表示这一参数。
镜头的光圈排列顺序是:1、1.4、2.0、2.8、3.5、4.0、5.6、8.0、11、16、22、32 等
等,F/#的大小是通常通过改变光圈调整环的大小来设置的。随着数值的增大,其实
际光孔大小也就随之减小,而其在相同快门时间内的光通量也就随之减小。
光圈可以控制镜头的进光量,也就是光照度,还可以调节景深,以及确定分辨率
下系统成像的对比度,从而影响成像质量。一般采用 F 来表示光圈,通常情况下都将
光圈设置在镜头内部。
公式表示为:F/#=EFL/DEP
其中 EFL 为有效焦距,DEP 为有效入瞳直径,这公式广泛运用于无穷远工作距离
的情况。
在机器视觉中,由于工作距离有限,物体与透镜非常接近,此时 F/#更精确的表
示为:
(F/#)w≈(1+ |m |)× F/#
例如:一个 F/2.8,放大率为-0.5 倍,25mm 镜头的(F/#)W 为 F/4.2。
F/#的正确计算对光照度和成像质量有着不可忽视的影响。
同时,与数值孔径 NA 也是密切相关的,这点在显微镜和机器视觉上显得尤为重
要:
NA=1/[2(F/#)]
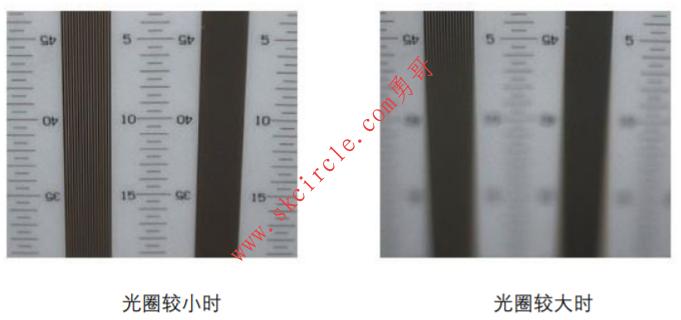
随着像元尺寸的持续减小,F/#成为了限制系统成像质量的重要因素,因为它所影
响景深和分辨率成反比的关系,景深增大,分辨率就降低。所以根据具体环境选取 F/#
大小也成为了一个重要的技术指标。
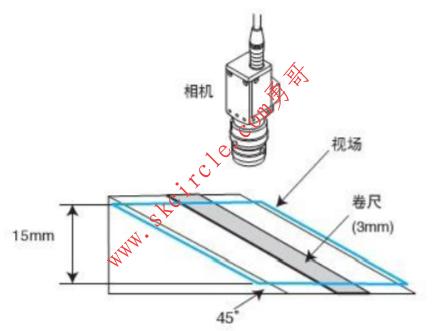
如下图所示:相机已安装在如图所示的位置,斜面上放有表示高度的卷尺,在
该情况下拍摄照片以比较光圈。
3.1.13 分辨率
镜头分辨率又称分辨力、鉴别率、鉴别力、分析力、解像力和分辨本领,是指摄
影镜头清晰地再现被摄景物细节的能力。镜头的分辨率是指在成像平面上 1mm 间距
内能分辨开的黑白相间的线条对数,它的单位是“线对/毫米”。 显然分辨率越高的
镜头,所拍摄的影像越清晰细腻。它的优点是可以量化,用数据表示,使结果更直观、
更科学、更严密。
分清传感器水平或者垂直方向上的像素大小及该方向上物体的尺寸,可以计算出
每个像元表示的物体大小,从而计算出分辨率,有助于选择镜头与传感器的最佳配合。
分辨率表示了镜头的解像能力,单位为 lp/mm。光学系统的分辨率取决于传感器
的像素,分辨率的最终确定,还取决于所选取的相应镜头的成像质量。
Pixel size 为像元尺寸,分辨率计算为如下公式:
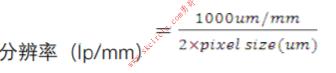
例如:pixel size=3.45um×3.45um,Number of pixels(H×V)=2048×2050 的传
感器,视场大小为 100mm,则
传感器尺寸:
放大率:
![]()
3.1.14 色差
由于我们拍摄的景物基本上都是彩色的(除了翻拍黑白文件稿等少数情况),可镜
头的成像是白光成像。我们知道白光是由各种不同波长的单色光组成的。而介质的折
射率是与波长有关的,因此成像时不同波长的光线会有差异,使得物上的点成像后产
生色彩的分离,这种现象就称为色差。色差可以分为位置色差和倍率色差两种。前者
是由于不同波长的光线会聚点不同而产生彩色弥散现象,后者是由于镜头对不同波长
的光的放大率不同而引起的。一般的镜头设计都进行了消色差计算。但是,要完全消
除色差是不可能的。根据镜头的档次,价格不同,消色差可以对二种波长、三种波长
或四种波长的光线进行计算。比如,对四种波长进行的超复消色差镜头的价格就是非
常高的了。一般情况下可以采用正负双胶合透镜进行色差的矫正。
3.1.15 像差
像差指镜头不能准确地按比例再现被摄体的影像。通俗地说,像差就是影像清晰
度差或有“失真”现象。除了复色光之间存在的色差之外,镜头的单色像差可以分为
五种,它们分别是影响成像清晰度的球差、彗差、像散、场曲以及影响物像相似度的
畸变。
以下就分别介绍五种不同性质的单色像差。
1、球差
球差是由于镜头的透镜球面上各点的聚光能力不同而引起的。从无穷远处来的平
行光线在理论上应该会聚在焦点上。但是由于近轴光线与远轴光线的会聚点并不一致,
会聚光线并不是形成一个点,而是一个以光轴为中心对称的弥散圆,这种像差就称为
球差。
球差的存在引起了成像的模糊,而从下图可以看出,这种模糊是与光圈的大小有
关的。小光圈时,由于光阑挡去了远轴光线,弥散圆的直径就小,图像就会清晰。大
光圈时弥散圆直径就大,图像就会比较模糊。必须注意,这种由球差引起的图像模糊
与景深中的模糊完全是两会事,不可以混为一谈的。球差可以通过复合透镜或者非球
面镜等办法在最大限度下消除的。在照相镜头中,光圈数增加一档(光孔缩小一档),
球差就缩小一半。我们在拍摄时,只要光线条件允许,可以考虑使用较小的光圈来减
小球差的影响。光圈数的增大也是有限制的,到达一定程度后就会达到衍射极限而无
法分辨。在设计中采用高折射率或者其他附加的镜头可以起到减小球差影响的效果,
但是这都可能导致镜头 2/3 和重量过大,成本过高的情况。
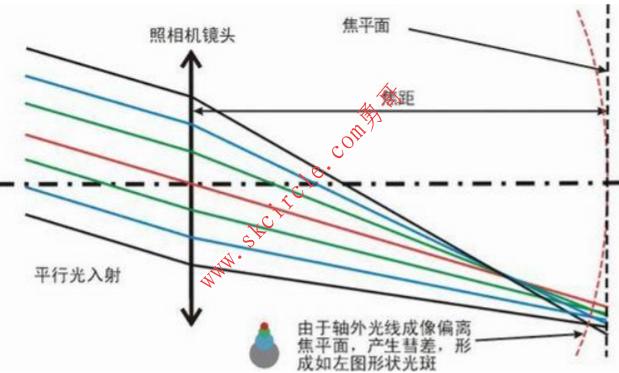
2、彗差
慧差是在轴外成像时产生的一种像差。从光轴外的某一点向镜头发出一束平行光
线,经光学系统后,在像平面上并不是成一个点的像,而是形成不对称的弥散光斑,
这种弥散光斑的形状像彗星,从中心到边缘拖着一个由细到粗的尾巴,首端明亮、清
晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差就称为彗差。彗差的大小既与
光圈有关,也与视场有关。我们在拍摄时也可以采取适当采用较小的光圈来减少彗差
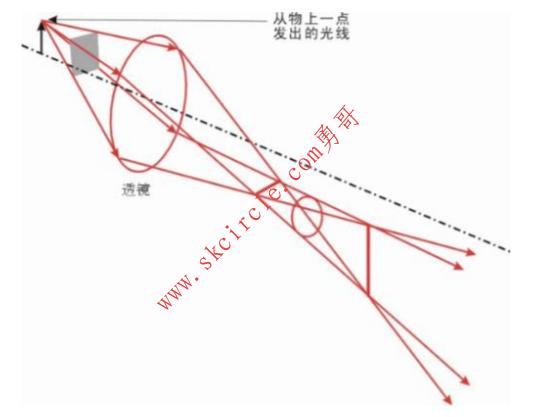
3、像散
像散也是一种轴外像差。与彗差不同,像散仅仅与视场有关。由于轴外光束的不
对称性,使得轴外点的子午细光束(即镜头的直径方向)的汇聚点与弧矢细光束(镜
头的圆弧方向)的会聚点位置不同,这种现象称为像散。像散可以对照眼睛的散光来
理解。带有散光的眼睛,实际上是在两个方向上的晶状体曲率不一致,造成看到的点
弥散成了一条短线。
像散也使得轴外成像的像质大大地下降。即使光圈开得很小,在子午和弧矢方向
仍然无法同时获得非常清晰的像。在广角镜头中,由于视场角比较大,像散现象就比
较明显。降低像散的方法主要有两种:采用对称结构,以及降低轴外视场光线的入射
角。
4、场曲
当拍摄垂直于光轴的平面上的物时,经过镜头所成的像并不在一个像平面内,而
是在以光轴为对称的一个弯曲表面上,这种成像的缺陷就是场曲。场曲是一种与孔径
无关的像差。靠减小光圈并不能改善因场曲带来的模糊。
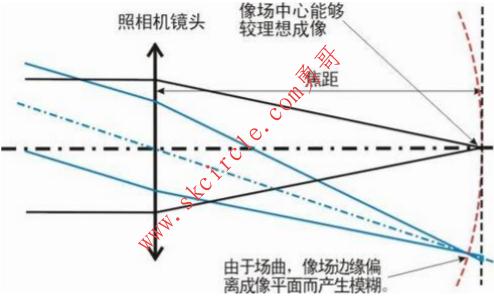
用存在场曲的镜头拍照时,当调焦至画面中央处影像清晰,画面四周影像就模糊;
而当调焦至画面四周影像清晰时,画面中央处的影像又开始模糊,无法在平直的像平
面上获得中心与四周都清晰的像。
因此在某些专用照相机中,故意将底片处于弧形位置,以减少场曲的影响。由于
广角镜头的场曲比一般镜头大,在拍团体照(经常使用广角镜头)时采用略带圆弧形
的站位排列,就是为了提高边缘视场的像质。
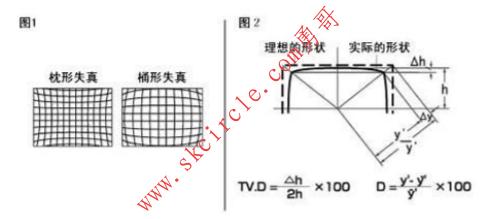
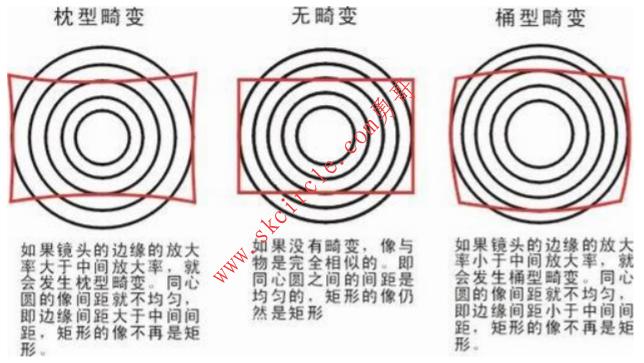
5、畸变
是指物所成的像在形状上的变形。畸变并不会影响像的清晰度,而只影响像与物
的相似性。由于畸变的存在,物方的一条直线在像方就变成了一条曲线,造成像的失
真。畸变可分为枕型畸变和桶型畸变两种。造成畸变的根本原因是镜头像场中央区的
横向放大率与边缘区的横向放大率不一致。如下图所示,如果边缘放大率大于中央放
大率就产生枕型畸变,反之,则产生桶型畸变。
畸变与镜头的光圈 F 数大小无关,只与镜头的视场有关。因此,广角镜头的畸变
一般都大于标准镜头或长焦镜头。无论是哪一种镜头,哪一种畸变,缩小光圈并都不
能改善畸变。
特别要注意镜头的畸变像差与透视畸变的并不是一回事。镜头的畸变是镜头成像
造成的,在设计镜头时可以采取各种手段(如非球面镜)来减小畸变。透视畸变是由
视点、视角、镜头指向(俯仰)等因素决定的,这是透视的规律。无论是何种镜头,
如果视点相同,视角相同,镜头指向相同的话,产生的透视畸变是相同的。
3.1.16 MTF
MTF(Modulation Transfer Function) 是指物体表面的浓淡变化,成像侧也被再现
出来。表示镜头的成像性能,成像再现物体的对比度的程度。测试对比性能,用的是
具有特定空间周波数的黑白间隔测试。空间周波数是指 1mm 的距离浓淡变化的程度。
黑白矩阵波,黑白的对比度为 100%.这个对象被镜头摄影后,成像的对比度的变
化被定量化。基本上,不管什么镜头,都会出现对比度降低的情况。最终对比度降低
至 0%。,不能进行颜色的区别。
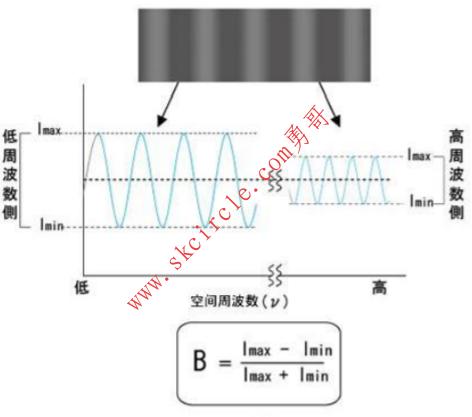
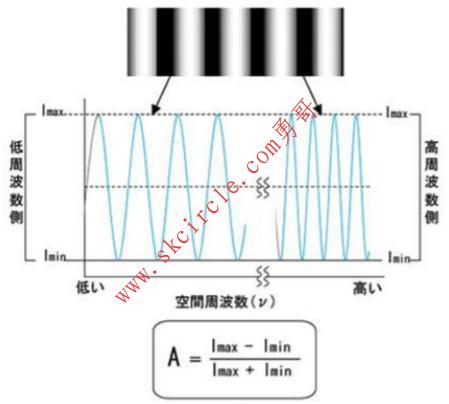
上图显示了物体侧与成像侧的空间周波数的变化。横轴表示空间周波数,纵轴表
示亮度。物体侧与成像侧的对比度由 A、B 计算出来。MTF 由 A,B 的比率计算出来。
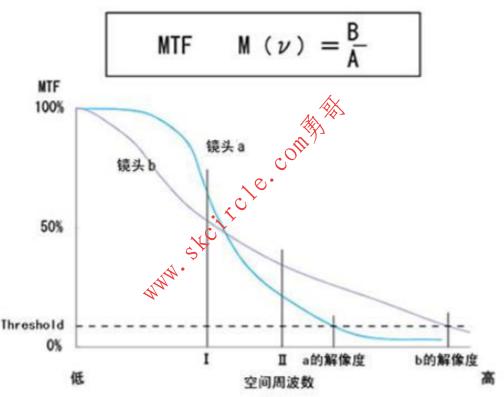
解析度与 MTF 的关系:解析度是指 2 点之间怎样被分离认识的间隔。一般从解
析度的值可以判断出镜头的好坏,但是实际是 MTF 与解析度有很大的关系。图 4 显
示了两个不同镜头的 MTF 曲线。镜头 a 解析度低,但是具有高对比度。镜头 b 对比
度低,但是解析度高。
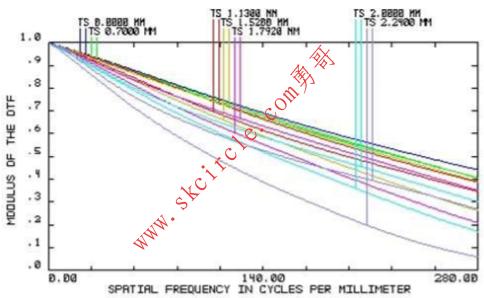
下图是一条 MTF 曲线,里面包含的信息有:MTF、空间频率和视场角
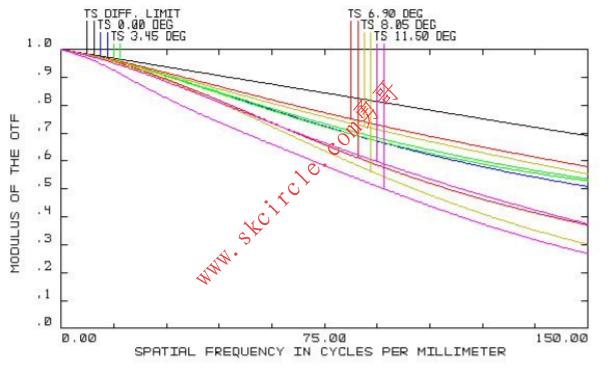
MTF 可以近似理解为黑白线条的对比度,最大值为 1;
• 顶端的黑色线条代表了该镜头的衍射极限 ,也就是该镜头理论上可以达到
的最佳成像质量。其余彩色线条分辨代表不同视场情况下的 MTF 值。其中同一颜色
的线条分辨代表子午 T 和弧矢 S 两个方向的 MTF 值情况。
• 空间频率的单位是 lp/mm,150lp/mm 表示 1 毫米距离内的黑白线对数;
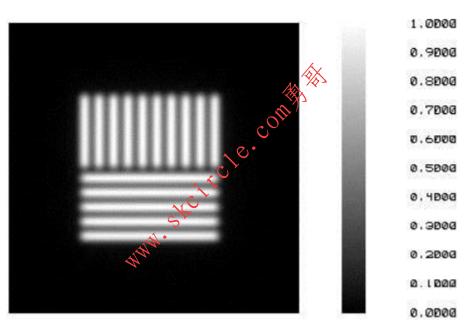
同一频率时 MTF 值不同,给图像带来的差异:
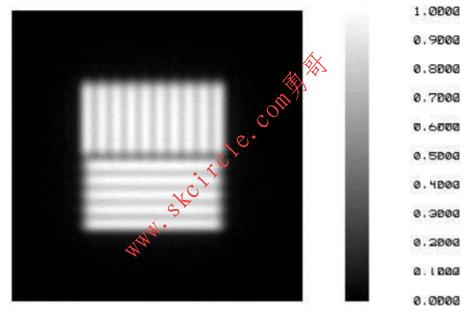
MTF 值相同,形状不同带来的图像差异:


3.1.17 通风盘及解析度
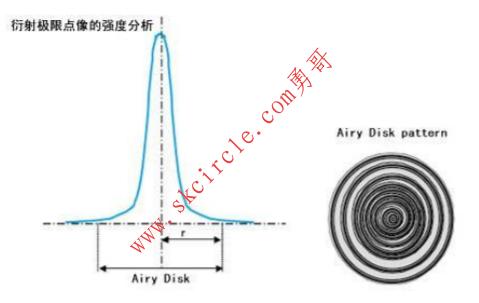
Airy Disk 是指通过没有失真的镜头在将光集中一点时,实际上形成的是一个同心
圆。这个同心圆就叫做 Airy Disk。Airy Disk 的半径 r 可以通过以下的计算公式计算出
来。这个值称为解析度。r= 0.61λ/NA Airy Disk 的半径随波长改变而改变,波长越
长,光越难集中于一点。 例:NA0.07 的镜头 波長 550nm r=0.61*0.55/0.07=4.8μ
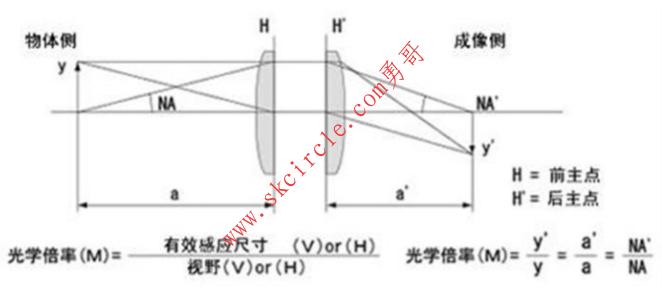
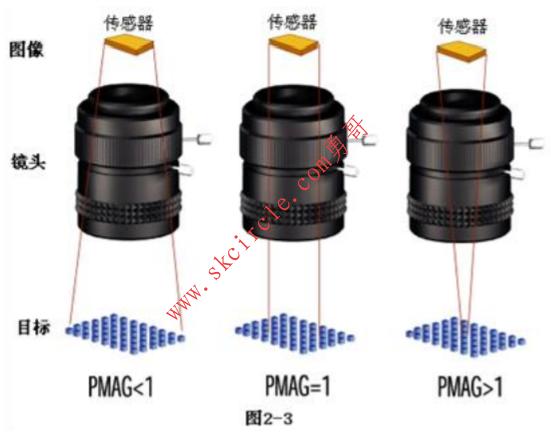
3.1.18 光学放大倍率(PMAG)
指实际物体通过镜头在相机传感器上的成像,成像大小与物体实际大小的比值
3.2 镜头类型
3.2.1 以功能分类
这也是机器视觉行业最常见的分类方式,主要有定焦镜头、变焦镜头、显微放大
镜头、远心镜头,不同类型镜头根据功能特性应用不同的检测需求。
定焦镜头:焦距固定,常见的有 8mm、12mm、16mm、25mm、35mm,虽然焦
距固定,但是可以通过聚焦环进行不同工作距离清晰成像,并可通过光圈调节控制进
光量,成像质量好,有效工作距离范围大,通常用于视野较大,是目前机器视觉行业
应用最为广泛的镜头。
变焦镜头:焦距可以调节,不同厂家调节范围不同,常用的有 3.5mm-8mm,
12mm-36mm 等等,使用起来灵活,由于设计原因,成像质量略低于定焦镜头,一般
属于较低端产品。
显微放大镜头:用于观测范围较小,通常为 mm 级,通常不用焦距来定义,而是
采用光学放大倍率,常见的显微放大镜头又分为定倍、变倍镜头,以 0.1 倍~10 倍光
学放大倍率为主。
远心镜头(Telecentric):是指在镜头物方、像方采取平行光路设计,单侧远心(物
方或像方)主要用于显微放大,通常为 2 倍光学倍率以下,双侧远心(物方和像方同
时远心)用于高精度成像,主要是为纠正传统工业镜头视差而设计,它可以在一定的
物距范围内,使得到的图像放大倍率不会变化,这对被测物不在同一物面上的情况是
非常重要的应用。远心镜头由于其特有的平行光路设计一直为对镜头畸变要求很高的
机器视觉应用场合所青睐,远心镜头依据其独特的光学特性:高分辨率、超宽景深、
超低畸变以及独有的平行光设计等,给机器视觉精密检测带来质的飞跃。
3.2.2 以镜头光圈分类
镜头有手动光圈和自动光圈之分,手动光圈镜头适合于亮度变化较小场所,自动光
圈镜头因光照度发生大幅度变化时,其光圈亦作自动调整,可提供必要的动态范围,使
相机产生优质的视频信号,故适合于亮度变化较大场所。自动光圈有两类:一类是通过
视频信号控制镜头光圈,称为视频输入型,另一类是利用机上直流电压直接控制光圈,
称为 DC 输入型。
手动光圈镜头:可与电子快门相机配套,在各种光线下均可使用。
自动光圈镜头:可与任何 CCD 相机配套,在各种光线下均可使用,特别用于被监
视表面亮度变化大、范围较大的场所。为了避免引起光晕现象和烧坏靶面,一般都配
自动光圈镜头。
3.2.3 以镜头视野(视场角)分类
标准镜头:指视角 30°左右,焦距长度接近相机画幅对角线长度的镜头。在 2/3 英
寸 CCD 相机中,标准镜头焦距定为 16mm
在 1/2 英寸 CCD 相机中,标准镜头焦距定为 12mm
在 1/3 英寸 CCD 相机中,标准镜头焦距定为 8mm。
广角与超广角镜头:视角 55°以上,广角与超广角镜头的焦距短于、视场角大于
标准镜头。对相机来说,焦距在 30mm 左右、视角在 70°左右称为广角镜头;焦距在
22mm 左右、视角在 90°左右称为超广角镜头。“
远摄与超远摄镜头: 视角 20°以内,远摄与超远摄镜头的焦距长于、视角小于标
准镜头。对相机来说,焦距在 20mm 左右、视角在 12°左右的称为远摄镜头;焦距在
300mm 以上、视角在 8°以下的称为超远摄镜头。
鱼眼镜头与反射式镜头:鱼眼镜头似乎是一种极端的超广角镜头,它利用镜头的
畸变获取极大的视角,视角在 180°左右,因其巨大的视角类似鱼眼视角而名。反射式
镜头又称折反射式镜头,实际上是一种超远摄镜头,外观特征是短而胖,比相同焦距
的远摄镜头短一半左右,重量也较轻,因而手持相机拍摄显得灵活、方便。
变焦镜头:焦距有一定变化范围,它的镜头焦距可在较大的幅度内自由调节,起
到了若干只不同焦距的定焦镜头的作用。它又有手动变焦和电动变焦两类,可对所监
视场景的视场角及目标物进行变焦距摄取图像,适合长距离变化观察和摄取目标。变
焦镜头的特点是:在成像清晰的情况下,通过镜头焦距的变化来改变图像大小与视场大
小。
微距镜头、透视调整镜头与皮腔镜头:微距镜头又称巨像镜头,是能产生巨像效
果的一种镜头。透视调整镜头又称移轴镜头,是用于调整影像透视效果或景深效果的
特殊镜头。皮腔镜头是指采用软管式皮腔连接 135 相机的镜头。
针孔镜头:镜头端头直径仅几毫米,可隐蔽安装。针孔镜头或棱镜镜头适用于有遮
盖物或有特殊要求的环境中,此时标准镜头或容易受损、或容易被发现,采用针孔镜头
或棱镜镜头可满足类似特殊要求,比如在工业窑炉及精神病院等场所。