0. 项目移植
对于不想知道其执行过程的朋友来说,可以直接移植,我的板子是STM32F411CER6, 512K M4内核
项目地址:
- Bootloader(可以自己写标志位用于自测,项目中这部分代码已经被注释,可以打开自行测试):
- 配套测试程序:
0.1 Bootloader移植
-
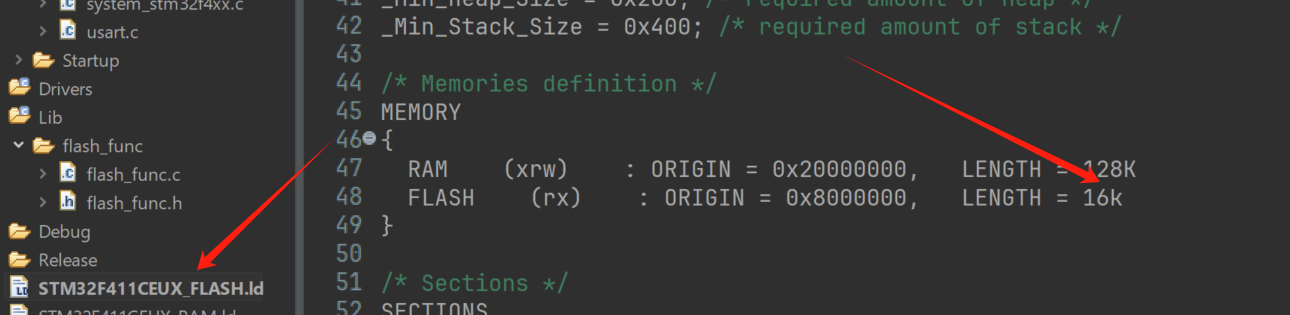
修改刷写大小,我用的Cubeide,我使用第一个扇区当作bootloader,其为16k
-
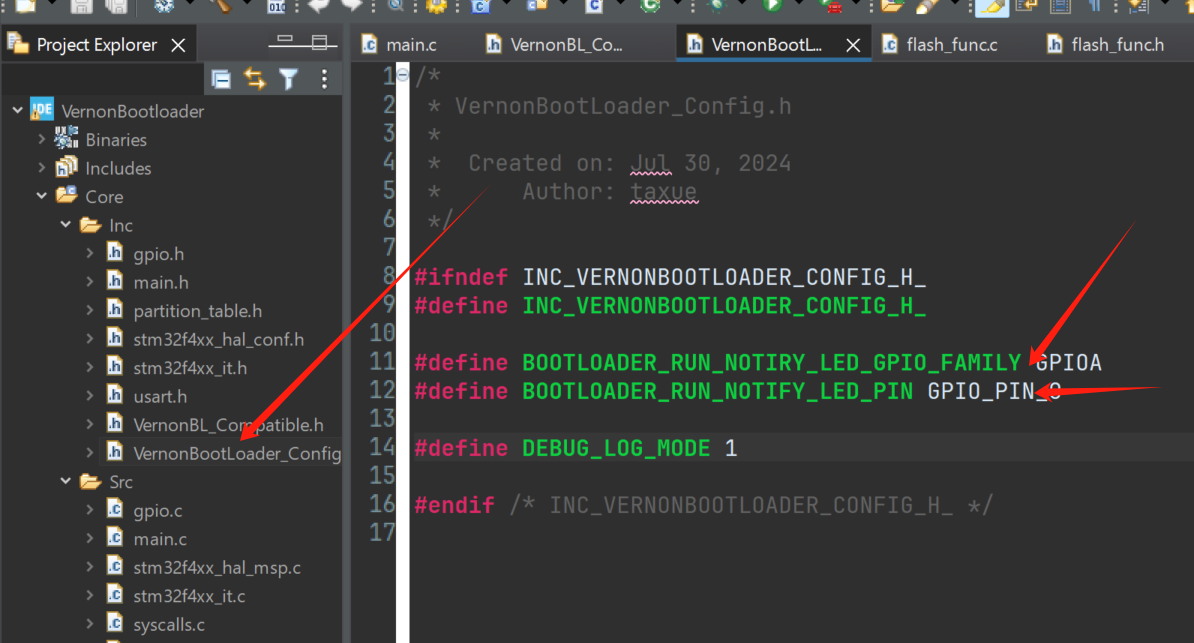
修改指示灯引脚
-
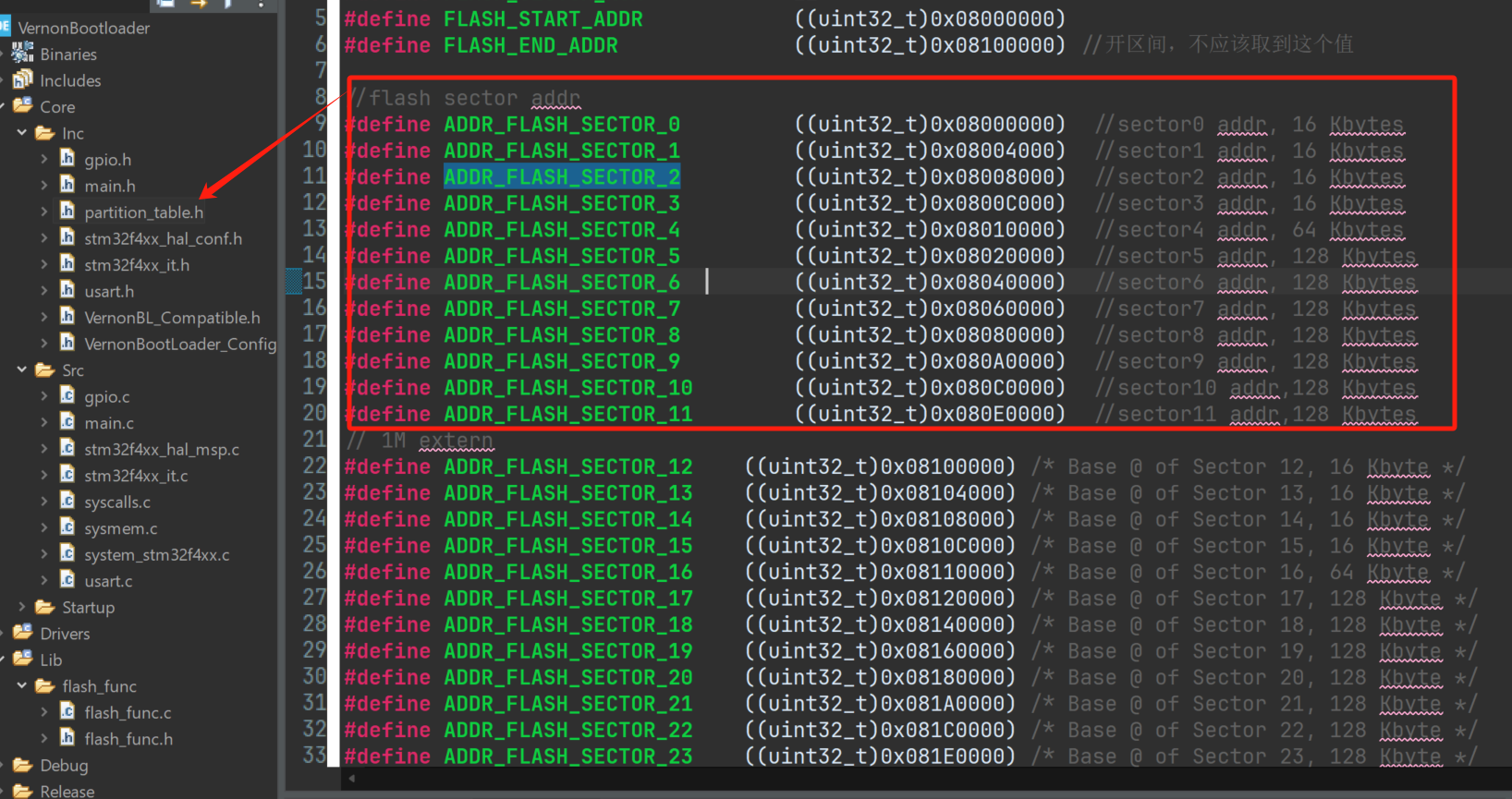
修改扇区开始地址,根据自己的芯片的内部FLASH扇区分配,分配对应的起始地址
-
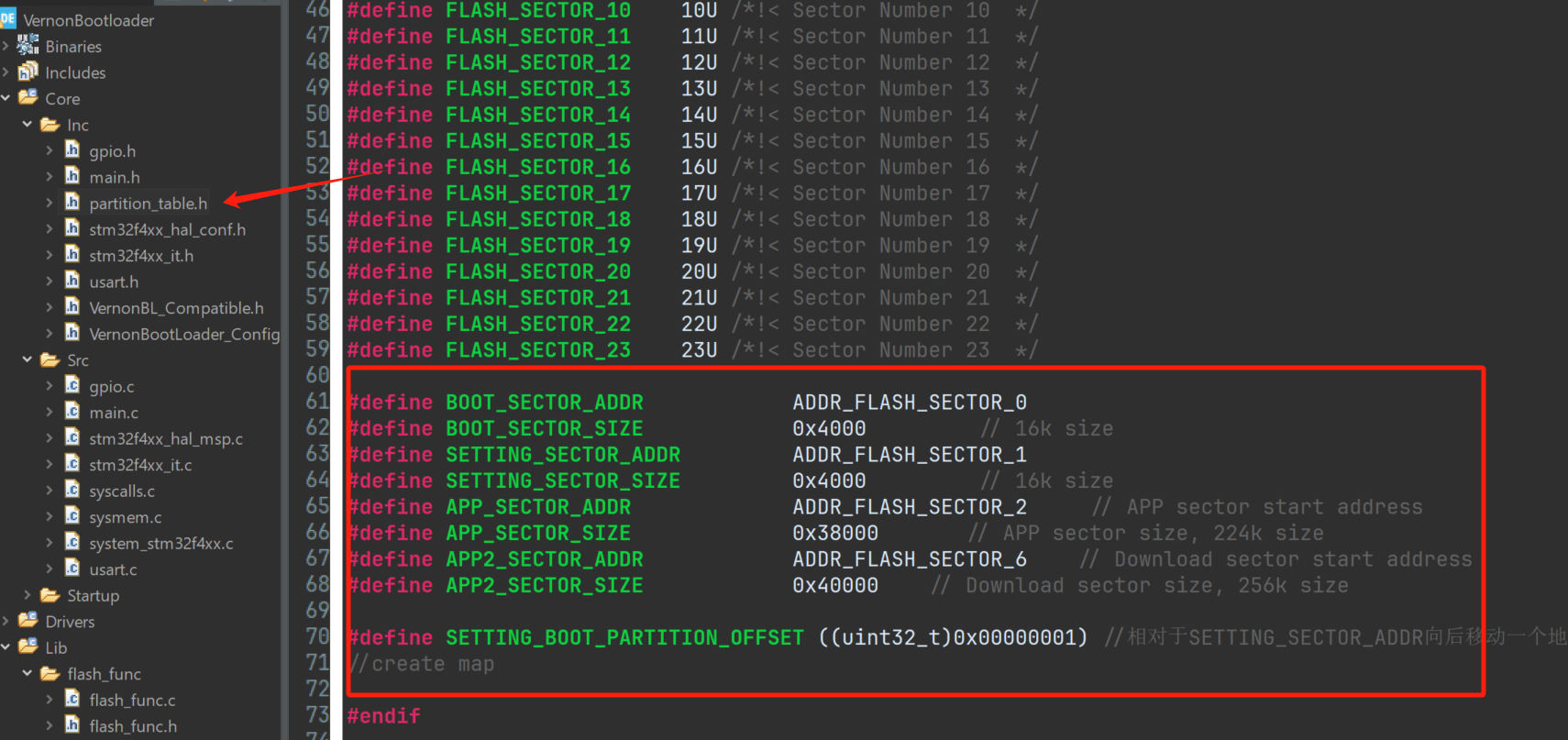
修改分区开始地址 ,分区参考1.1中的分区表进行分区
-
修改刷写大小
0.2 应用程序和Bootloaer配合
-
应用程序只要正确的将程序刷写到对应的分区开始地址即可,刷写示例程序参照 2.2
-
应用程序可以选择性包含以下两个文件,
VernonBL_Compatible.h文件用于指示Settings分区中各个变量的枚举值,便于和Bootloader交互,partition_table.h则保存分区表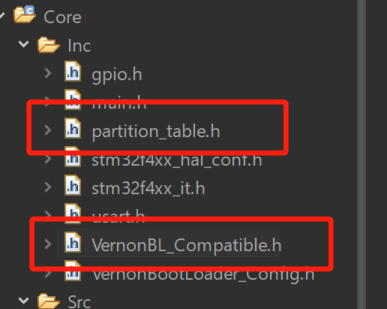
-
最为重要的一步!!!
重定义向量表,设置向量表偏移量,0x0000_8000是因为前两个分区占据了32k大小,换成十六进制为0x8000
-
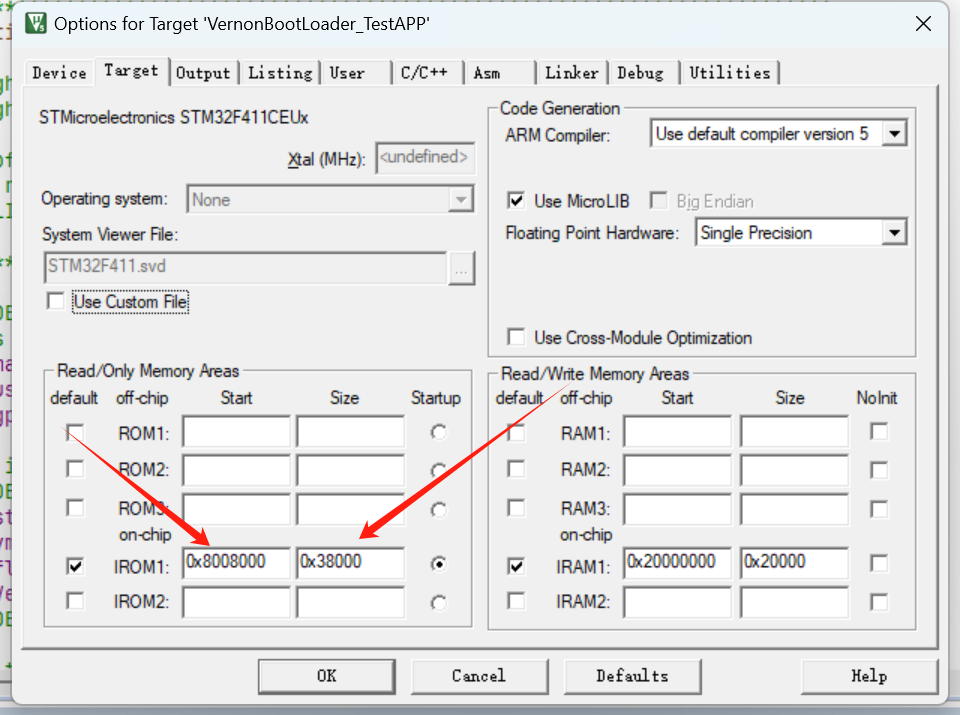
魔术棒修改刷写地址
1. 整体思路
正常的裸机STM32直接开始执行程序,为了能够正式启动应用程序之前能过做更多的功能,比如固件更新等,因此我们需要Bootloader
在正常的STM32启动流程中,其实也有Bootloader的身影存在,即我们在开发的时候所看到的启动文件。
我们先来大致过一下正常的STM32是如何进行启动的。
- STM32首先将ROM的0x0800_0000映射成0x0000_0000
- STM32获取0x0800_0000的第一地址内的内容(连续取32位),此内容即为MSP堆栈指针,此后单片机便从此地址开始读取数据
- STM32获取从0x0800_0000偏移四个地址的内容(0x0800_0004)(因为上面读取了32位),此内容则为PC指针的内容,至此,单片机跳转到0x0800_0004中所代表地址(因为此地址的值给了PC指针),PC指针的地址刚好是函数SystemInit的地址
- SystemInit中负责相关时钟初始化等工作。
具体的启动细节这里不在解释,读者可自行查阅其他文章
1.1 分区介绍
分区有好几种分区方式,具体可以参见这个文章https://blog.csdn.net/ShenZhen_zixian/article/details/129064681
要想实现Bootloader启动,我们就应该先给ROM 进行分区,这里我们采用一种全新的方式,这种方式,我们就得采用奇数和偶数更新法,就是奇数版本号更新到Application,偶数版本更新到Application_2,因为我们两个分区的程序中断向量表映射位置是不同的。优点就是有一个版本的备份。
下图对STM32F411CEU6 512K的ROM进行分配的,STM32F1系列可以分配到1k一个扇区
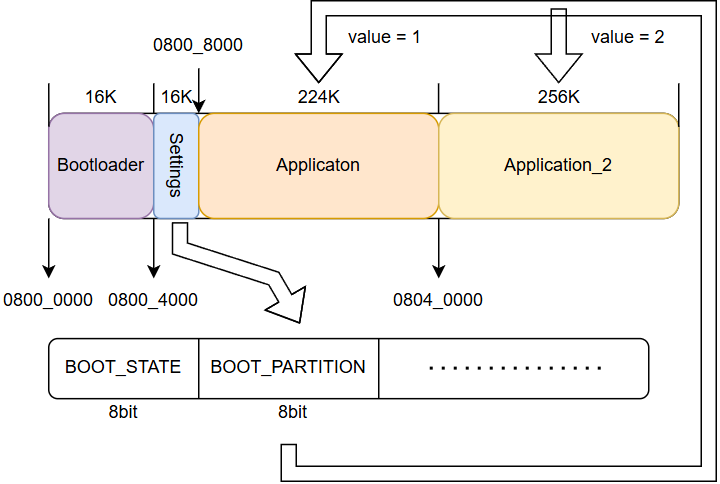
我们采用Bootloader分区+设置参数+双分区的形式,和其他教程不同的是,Application_2也用于运行程序,即:Bootloader只识别BOOT_PARTITION中的内容,用来识别跳转到第Application分区还是Application_2分区,这样做的好处是即使新版本任何错误,我们Bootloader可以自动切换回旧的版本运行。防止造成设备故障。
1.2 启动过程
阅读本章之前请先阅读这个文章,讲的很好很清楚:https://shatang.github.io/2020/08/12/IAP%E5%8D%87%E7%BA%A7-Bootloader%E5%88%B6%E4%BD%9C/
使用Bootloader之后,我们的启动过程为:先启动Bootloader,Bootloader再来启动应用程序。具体在Bootloader内应该:
- 判断栈顶指针是否合规
- 获得应用程序的PC指针
- 设置应用程序MSP堆栈指针
- 通过PC地址跳转到应用程序,开始执行应用程序
具体在应用程序内应该:
- 重定向向量表–>设置向量表偏移量(注意一定要设置偏移量(VECT_TAB_OFFSET)来完成重定向向量表,而不是设置FLASH_BASE来达到重定向向量表的效果,不然DMA之类的中断无法使用!!!后面会详细讲到)
- 检查是否有用户更新,用户更新的时候刷写到Application的另外一个分区
- 写Settings中的信息,用于指示Bootloader下一步启动时启动哪个Application
2. 代码编写
2.1 Boot loader编写
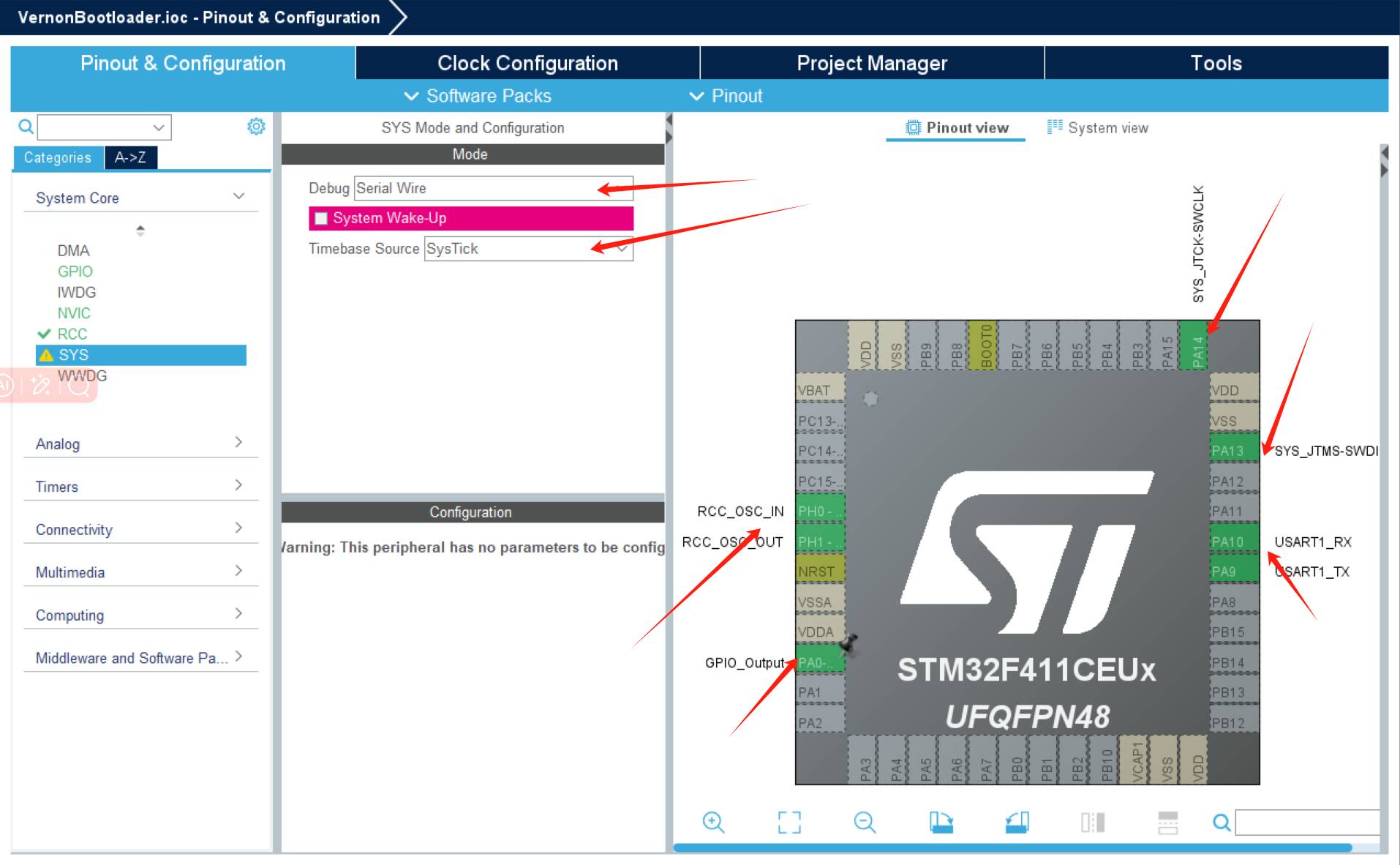
2.1.0 CubeMX配置
cubemx里面的这些引脚我相信各位一看就知道我配置了什么,简单地说除了必要的配置,我另外配置了串口、还有一个指示灯(PA0),指示灯使用Systick提供闪烁功能。
要注意的是,STM32F411CEU6 HAL库Systick的中断回调默认官方对其进行了关闭,按照如下方式打开:
如果你的Systick_Handler打开是这样子的,只有一个HAL_IncTick()
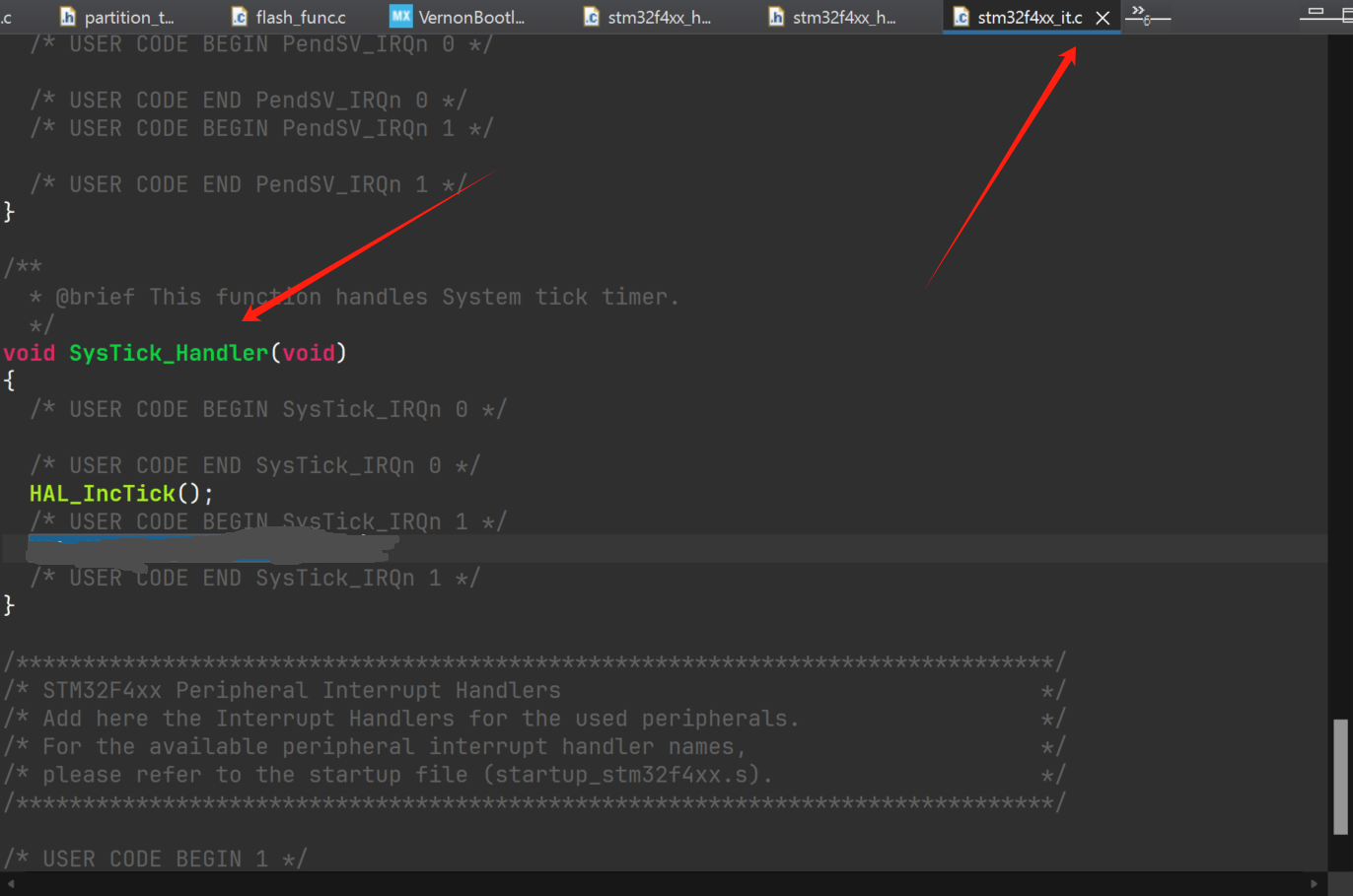
那么改成这样,把HAL_SYSTICK_IRQHandler()加进去
//stm32f4xx_it.c
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
HAL_SYSTICK_IRQHandler();
/* USER CODE END SysTick_IRQn 1 */
}
这样你main.c中才能写Systick回调
//mainc.c
void HAL_SYSTICK_Callback(void){
bootloader_run_notify_led_count ++;
if(bootloader_run_notify_led_count >= 600)
{
bootloader_run_notify_led_count = 0;
led_blink_on = ~led_blink_on;
}
}
2.1.1 跳转函数
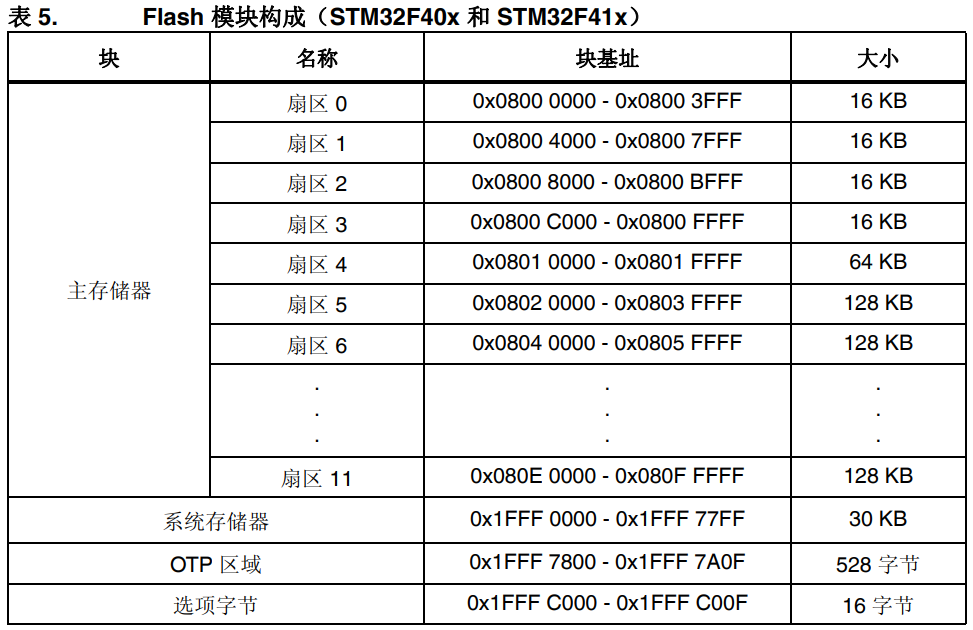
在编写跳转函数之前,我们应该先根据手册将扇区定义好,我这里用的STM32F411CEU6,其有512K Flash,因此根据图表,列出定义
//partation_table.h
#define ADDR_FLASH_SECTOR_0 ((uint32_t)0x08000000) //sector0 addr, 16 Kbytes
#define ADDR_FLASH_SECTOR_1 ((uint32_t)0x08004000) //sector1 addr, 16 Kbytes
#define ADDR_FLASH_SECTOR_2 ((uint32_t)0x08008000) //sector2 addr, 16 Kbytes
#define ADDR_FLASH_SECTOR_3 ((uint32_t)0x0800C000) //sector3 addr, 16 Kbytes
#define ADDR_FLASH_SECTOR_4 ((uint32_t)0x08010000) //sector4 addr, 64 Kbytes
#define ADDR_FLASH_SECTOR_5 ((uint32_t)0x08020000) //sector5 addr, 128 Kbytes
#define ADDR_FLASH_SECTOR_6 ((uint32_t)0x08040000) //sector6 addr, 128 Kbytes
#define ADDR_FLASH_SECTOR_7 ((uint32_t)0x08060000) //sector7 addr, 128 Kbytes
编写其跳转函数:我们根据官方的IAP程序中的示例,我们直接拿过来。
//main.c
typedef void (*pFunction)(void);
static pFunction JumpToApplication;
static uint32_t JumpAddress;
uint8_t IAP_LoadAPP(uint32_t AppxAddr)
{
if (((*(__IO uint32_t*)AppxAddr) & 0x2FFE0000 ) == 0x20000000)
{
/* Jump to user application */
JumpAddress = *(__IO uint32_t*) (AppxAddr + 4); //PC指针地址
JumpToApplication = (pFunction) JumpAddress;
/* Initialize user application's Stack Pointer */
__set_MSP(*(__IO uint32_t*) AppxAddr); //设置MSP指针
JumpToApplication();
return 0;
}
return -1;
}
2.2.2 日志
打印点东西,表示我进入Bootloader了
void print_boot_message(void)
{
printf("\r\n--------- Enter Vernon BootLoader --------\r\n");
printf("\r\n");
printf("========= flash partition table ==========\r\n");
printf("| name | offset | size |\r\n");
printf("--------------------------------------\r\n");
printf("| bootloader | 0x%08lx | 0x%08x |\r\n", BOOT_SECTOR_ADDR, BOOT_SECTOR_SIZE);
printf("| setting | 0x%08lx | 0x%08x |\r\n", SETTING_SECTOR_ADDR, SETTING_SECTOR_SIZE);
printf("| application1 | 0x%08lx | 0x%08x |\r\n", APP_SECTOR_ADDR, APP_SECTOR_SIZE);
printf("| application2 | 0x%08lx | 0x%08x |\r\n", APP2_SECTOR_ADDR, APP2_SECTOR_SIZE);
printf("==========================================\r\n");
printf("\r\n");
}
2.2.3 Flash刷写函数
下面这几个函数是用来写Settings这个分区里的标志位的,即BOOT_STATE和BOOT_PARTITION
//flash_fun.c
int8_t read_settings_boot_state(void)
{
return *(__IO uint8_t *)(SETTING_SECTOR_ADDR);
}
int8_t write_settings_boot_state(uint8_t state)
{
uint32_t sector_index;
HAL_StatusTypeDef res;
uint32_t read_buf;
read_buf = *(__IO uint32_t *)(SETTING_SECTOR_ADDR); // 先把前四个字节数据读出来
res = HAL_FLASH_Unlock();
if (res != HAL_OK)
{
printf("FLASH_UNLOCK ERROR\r\n");
return -1;
}
sector_index = get_sector_from_addr(SETTING_SECTOR_ADDR);
printf("[Bootloader]Erase ADDR 0x%08lx; Sector No.%ld...\r\n", SETTING_SECTOR_ADDR, sector_index);
FLASH_Erase_Sector(sector_index, FLASH_VOLTAGE_RANGE_3);
printf("[Bootloader]Flash ADDR 0x%08lx ...\r\n", SETTING_SECTOR_ADDR);
// 把想要写入的信息写入readbuf中去,最后把32位信息一起写进去
read_buf &= 0xffffff00; // 先把第一个字节数据清0,FLASH是高字节存储在高位,低字节存储在低位,所以应该把低字节设置为0
read_buf |= state;
res = HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, SETTING_SECTOR_ADDR, read_buf);
if (res != HAL_OK)
{
printf("[Bootloader]FLASH_WRITE ERROR\r\n");
return -1;
}
res = HAL_FLASH_Lock();
if (res != HAL_OK)
{
printf("[Bootloader]FLASH_LOCK ERROR\r\n");
return -1;
}
return 0;
}
int8_t read_settings_boot_partition(void)
{
return *(__IO uint8_t *)(SETTING_SECTOR_ADDR + SETTING_BOOT_PARTITION_OFFSET);
}
int8_t write_settings_boot_partition(int8_t state)
{
int sector_index;
HAL_StatusTypeDef res;
uint32_t read_buf;
read_buf = *(__IO uint32_t *)(SETTING_SECTOR_ADDR); // 先把前四个字节数据读出来
res = HAL_FLASH_Unlock();
if (res != HAL_OK)
{
printf("FLASH_UNLOCK ERROR\r\n");
return -1;
}
sector_index = get_sector_from_addr(SETTING_SECTOR_ADDR);
printf("[Bootloader]Erase ADDR 0x%08lx; Sector No.%d...\r\n", SETTING_SECTOR_ADDR, sector_index);
FLASH_Erase_Sector(sector_index, FLASH_VOLTAGE_RANGE_3);
printf("[Bootloader]Flash ADDR 0x%08lx ...\r\n", SETTING_SECTOR_ADDR);
// 把想要写入的信息写入readbuf中去,最后把32位信息一起写进去
read_buf &= 0xffff00ff; // 先把第二个字节数据清0,FLASH是高字节存储在高位,低字节存储在低位,所以应该把低字节设置为0
read_buf |= (state << 8); // 放在第二个字节的位置
res = HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, SETTING_SECTOR_ADDR, read_buf);
if (res != HAL_OK)
{
printf("[Bootloader]FLASH_WRITE ERROR\r\n");
return -1;
}
res = HAL_FLASH_Lock();
if (res != HAL_OK)
{
printf("[Bootloader]FLASH_LOCK ERROR\r\n");
return -1;
}
return 0;
}
2.2.4 根据标志位启动对应应用程序
BOOT_STATE有三个状态,分别为运行状态,更新应用程序状态和应用程序更新完成状态,应用程序更新由用户编写的应用程序完成,这里只负责根据对应标志位跳转。
//main.c
boot_state = read_settings_boot_state();
boot_partition_select = read_settings_boot_partition();
switch(boot_state)
{
case RUN_APP_STATE:
printf("[Bootloader]Start to run APP[%d] ...\r\n", boot_partition_select);
if(boot_partition_select == RUN_APP1_partition){
err = IAP_LoadAPP(APP_SECTOR_ADDR);
if(err != 0)
{
printf("[Bootloader]Run App error, please flash the new bin...\r\n");
}
}else if(boot_partition_select == RUN_APP2_partition){
err = IAP_LoadAPP(APP2_SECTOR_ADDR);
if(err != 0)
{
printf("[Bootloader]Run App error, please flash the new bin...\r\n");
}
}else{
printf("[Bootloader]Can not find the select settings of the partition\r\n");
}
break;
case UPDATE_APP_STATE:
printf("[Bootloader]Update APP...\r\n");
break;
case SUCCESS_UPDATE_APP_STATE:
printf("[Bootloader]Success Update APP...Then Reboot System\r\n");
err = write_settings_boot_state(RUN_APP_STATE);
if(err != 0)
{
printf("FLASH ERROR!\r\n");
}
__ASM volatile ("cpsid i"); //关闭总中断
HAL_NVIC_SystemReset();
break;
default:
printf("[Bootloader]Unknown Update APP...Error Code : %x\r\n", boot_state);
}
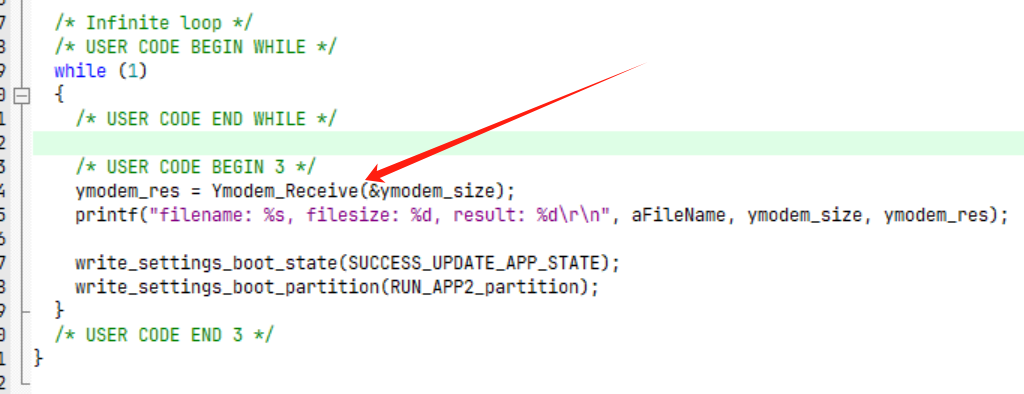
2.2 用户程序编写-测试
在应用程序中,使用YModem协议进行数据传输,写入新的固件,之后再由应用程序写入Setttings配置信息,重启之后Bootloader即可自动启动新更新的应用。
2.2.1 Flash和Ymodem函数的实现
这两个部分在Cubemx的实例中有,但是其Flash函数个人测试无法使用,还有Ymodem函数有bug,个人对其进行了修改和适配,篇幅限制,就不说改了哪里了,大家直接在Gitee克隆下来用吧,具体代码可以去库里面查看
2.2.1.1 Flash函数
在Bootloader中的函数中再添加
//flash_func.c
// FLash Function
/**
* @brief This function does an erase of all user flash area
* @param StartSector: start of user flash area
* @retval 0: user flash area successfully erased
* 1: error occurred
*/
uint32_t flash_erase(uint32_t StartAdd)
{
uint32_t UserStartSector;
uint32_t SectorError;
FLASH_EraseInitTypeDef pEraseInit;
HAL_FLASH_Unlock();
/* Get the sector where start the user flash area */
UserStartSector = get_sector_from_addr(StartAdd);
pEraseInit.TypeErase = TYPEERASE_SECTORS;
pEraseInit.Sector = UserStartSector;
pEraseInit.NbSectors = 5;
pEraseInit.VoltageRange = VOLTAGE_RANGE_3;
if (HAL_FLASHEx_Erase(&pEraseInit, &SectorError) != HAL_OK)
{
/* Error occurred while page erase */
return (1);
}
HAL_FLASH_Lock();
return (0);
}
/**
* @brief This function writes a data buffer in flash (data are 32-bit aligned).
* @note After writing data buffer, the flash content is checked.
* @param StartAddress: start address for writing data buffer
* @param EndAddress: end address for writing data buffer
* @param Data: pointer on data buffer
* @param DataLength: length of data buffer (unit is 32-bit word)
* @retval 0: Data successfully written to Flash memory
* -2: Error occurred while writing data in Flash memory
* -1: Written Data in flash memory is different from expected one
*/
int8_t flash_write_continue(uint32_t StartAddress, uint32_t EndAddress,
uint32_t *Data, uint32_t DataLength)
{
int32_t i = 0;
HAL_FLASH_Unlock();
for (i = 0; (i < DataLength) && (StartAddress <= (EndAddress - 4)); i++)
{
/* Device voltage range supposed to be [2.7V to 3.6V], the operation will
be done by word */
if (HAL_FLASH_Program(TYPEPROGRAM_WORD, StartAddress, *(uint32_t *)(Data + i)) == HAL_OK)
{
/* Check the written value */
if (*(uint32_t *)StartAddress != *(uint32_t *)(Data + i))
{
/* Flash content doesn't match SRAM content */
return (-1);
}
/* Increment FLASH destination address */
StartAddress += 4;
}
else
{
/* Error occurred while writing data in Flash memory */
return (-2);
}
}
HAL_FLASH_Lock();
return (0);
}
2.2.1.2 Ymodem函数
关于协议,可以看这篇https://blog.csdn.net/weixin_41865104/article/details/107388202
//ymedom.c
/**
******************************************************************************
* @file IAP/IAP_Main/Src/ymodem.c
* @author MCD Application Team
* @brief This file provides all the software functions related to the ymodem
* protocol.
******************************************************************************
* @attention
*
* Copyright (c) 2017 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/** @addtogroup STM32F4xx_IAP_Main
* @{
*/
/* Includes ------------------------------------------------------------------*/
#include "common.h"
#include "ymodem.h"
#include "string.h"
#include "main.h"
#include "usart.h"
#include "VernonBL_Compatible.h"
#include "flash_func.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define CRC16_F /* activate the CRC16 integrity */
#define UartHandle huart1
#define APPLICATION_ADDRESS APP2_SECTOR_ADDR
#define APPLICATION_PARTITION_SIZE APP_SECTOR_SIZE
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
__IO uint32_t flashdestination;
/* @note ATTENTION - please keep this variable 32bit aligned */
uint8_t aPacketData[PACKET_1K_SIZE + PACKET_DATA_INDEX + PACKET_TRAILER_SIZE];
uint8_t aFileName[FILE_NAME_LENGTH];
/* Private function prototypes -----------------------------------------------*/
static HAL_StatusTypeDef ReceivePacket(uint8_t *p_data, uint32_t *p_length, uint32_t timeout);
uint16_t UpdateCRC16(uint16_t crc_in, uint8_t byte);
uint16_t Cal_CRC16(const uint8_t *p_data, uint32_t size);
uint8_t CalcChecksum(const uint8_t *p_data, uint32_t size);
/* Private functions ---------------------------------------------------------*/
/**
* @brief Receive a packet from sender
* @param data
* @param length
* 0: end of transmission
* 2: abort by sender
* >0: packet length
* @param timeout
* @retval HAL_OK: normally return
* HAL_BUSY: abort by user
*/
static HAL_StatusTypeDef ReceivePacket(uint8_t *p_data, uint32_t *p_length, uint32_t timeout)
{
uint32_t crc;
uint32_t packet_size = 0;
HAL_StatusTypeDef status;
uint8_t char1;
*p_length = 0;
status = HAL_UART_Receive(&UartHandle, &char1, 1, timeout);
if (status == HAL_OK)
{
switch (char1)
{
case SOH:
packet_size = PACKET_SIZE;
break;
case STX:
packet_size = PACKET_1K_SIZE;
break;
case EOT:
break;
case CA:
if ((HAL_UART_Receive(&UartHandle, &char1, 1, timeout) == HAL_OK) && (char1 == CA))
{
packet_size = 2;
}
else
{
status = HAL_ERROR;
}
break;
case ABORT1:
case ABORT2:
status = HAL_BUSY;
break;
default:
status = HAL_ERROR;
break;
}
*p_data = char1;
if (packet_size >= PACKET_SIZE)
{
status = HAL_UART_Receive(&UartHandle, &p_data[PACKET_NUMBER_INDEX], packet_size + PACKET_OVERHEAD_SIZE, timeout);
/* Simple packet sanity check */
if (status == HAL_OK)
{
if (p_data[PACKET_NUMBER_INDEX] != ((p_data[PACKET_CNUMBER_INDEX]) ^ NEGATIVE_BYTE))
{
packet_size = 0;
status = HAL_ERROR;
}
else
{
/* Check packet CRC */
crc = p_data[packet_size + PACKET_DATA_INDEX] << 8;
crc += p_data[packet_size + PACKET_DATA_INDEX + 1];
if (Cal_CRC16(&p_data[PACKET_DATA_INDEX], packet_size) != crc)
{
packet_size = 0;
status = HAL_ERROR;
}
}
}
else
{
packet_size = 0;
}
}
}
*p_length = packet_size;
return status;
}
/**
* @brief Update CRC16 for input byte
* @param crc_in input value
* @param input byte
* @retval None
*/
uint16_t UpdateCRC16(uint16_t crc_in, uint8_t byte)
{
uint32_t crc = crc_in;
uint32_t in = byte | 0x100;
do
{
crc <<= 1;
in <<= 1;
if (in & 0x100)
++crc;
if (crc & 0x10000)
crc ^= 0x1021;
}
while (!(in & 0x10000));
return crc & 0xffffu;
}
/**
* @brief Cal CRC16 for YModem Packet
* @param data
* @param length
* @retval None
*/
uint16_t Cal_CRC16(const uint8_t *p_data, uint32_t size)
{
uint32_t crc = 0;
const uint8_t *dataEnd = p_data + size;
while (p_data < dataEnd)
crc = UpdateCRC16(crc, *p_data++);
crc = UpdateCRC16(crc, 0);
crc = UpdateCRC16(crc, 0);
return crc & 0xffffu;
}
/**
* @brief Calculate Check sum for YModem Packet
* @param p_data Pointer to input data
* @param size length of input data
* @retval uint8_t checksum value
*/
uint8_t CalcChecksum(const uint8_t *p_data, uint32_t size)
{
uint32_t sum = 0;
const uint8_t *p_data_end = p_data + size;
while (p_data < p_data_end)
{
sum += *p_data++;
}
return (sum & 0xffu);
}
/* Public functions ---------------------------------------------------------*/
/**
* @brief Receive a file using the ymodem protocol with CRC16.
* @param p_size The size of the file.
* @retval COM_StatusTypeDef result of reception/programming
*/
COM_StatusTypeDef Ymodem_Receive(uint32_t *p_size)
{
uint32_t i, packet_length, session_done = 0, file_done, errors = 0, session_begin = 0;
// uint32_t flashdestination;
uint32_t ramsource, filesize, packets_received;
uint8_t *file_ptr;
uint8_t file_size[FILE_SIZE_LENGTH], tmp;
COM_StatusTypeDef result = COM_OK;
*p_size = 0; //it may be a random value if you not assigned value in out of the function
/* Initialize flashdestination variable */
flashdestination = APP2_SECTOR_ADDR;
while ((session_done == 0) && (result == COM_OK))
{
packets_received = 0;
file_done = 0;
while ((file_done == 0) && (result == COM_OK))
{
switch (ReceivePacket(aPacketData, &packet_length, DOWNLOAD_TIMEOUT))
{
case HAL_OK:
errors = 0;
switch (packet_length)
{
case 2:
/* Abort by sender */
Serial_PutByte(ACK);
result = COM_ABORT;
break;
case 0:
/* End of transmission */
Serial_PutByte(ACK);
file_done = 1;
break;
default:
/* Normal packet */
if (aPacketData[PACKET_NUMBER_INDEX] != (uint8_t)packets_received)
{
Serial_PutByte(NAK);
}
else
{
if (packets_received == 0)
{
/* File name packet */
if (aPacketData[PACKET_DATA_INDEX] != 0)
{
/* File name extraction */
i = 0;
file_ptr = aPacketData + PACKET_DATA_INDEX;
while ((*file_ptr != 0) && (i < FILE_NAME_LENGTH))
{
aFileName[i++] = *file_ptr++;
}
/* File size extraction */
aFileName[i++] = '\0';
i = 0;
file_ptr++;
while ((*file_ptr != ' ') && (i < FILE_SIZE_LENGTH))
{
file_size[i++] = *file_ptr++;
}
file_size[i++] = '\0';
Str2Int(file_size, &filesize);
/* Test the size of the image to be sent */
/* Image size is greater than Flash size */
if (*p_size > (APPLICATION_PARTITION_SIZE + 1))
{
/* End session */
tmp = CA;
HAL_UART_Transmit(&UartHandle, &tmp, 1, NAK_TIMEOUT);
HAL_UART_Transmit(&UartHandle, &tmp, 1, NAK_TIMEOUT);
result = COM_LIMIT;
}
/* erase user application area */
flash_erase(APPLICATION_ADDRESS);
*p_size = filesize;
Serial_PutByte(ACK);
Serial_PutByte(CRC16);
}
/* File header packet is empty, end session */
else
{
Serial_PutByte(ACK);
file_done = 1;
session_done = 1;
break;
}
}
else /* Data packet */
{
ramsource = (uint32_t)&aPacketData[PACKET_DATA_INDEX];
/* Write received data in Flash */
if (flash_write_continue(flashdestination, APPLICATION_ADDRESS + APPLICATION_PARTITION_SIZE,
(uint32_t*) ramsource, packet_length/4) == 0)
{
//data transforming led blink
int value = 3;
while(value --)
{
HAL_Delay(50);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_Delay(50);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);
}
flashdestination += packet_length;
Serial_PutByte(ACK);
}
else /* An error occurred while writing to Flash memory */
{
/* End session */
Serial_PutByte(CA);
Serial_PutByte(CA);
result = COM_DATA;
}
}
packets_received++;
session_begin = 1;
}
break;
}
break;
case HAL_BUSY: /* Abort actually */
Serial_PutByte(CA);
Serial_PutByte(CA);
result = COM_ABORT;
break;
default:
if (session_begin > 0)
{
errors++;
}
if (errors > MAX_ERRORS)
{
/* Abort communication */
Serial_PutByte(CA);
Serial_PutByte(CA);
}
else
{
Serial_PutByte(CRC16); /* Ask for a packet */
}
break;
}
}
}
return result;
}
/*******************(C)COPYRIGHT 2016 STMicroelectronics *****END OF FILE****/
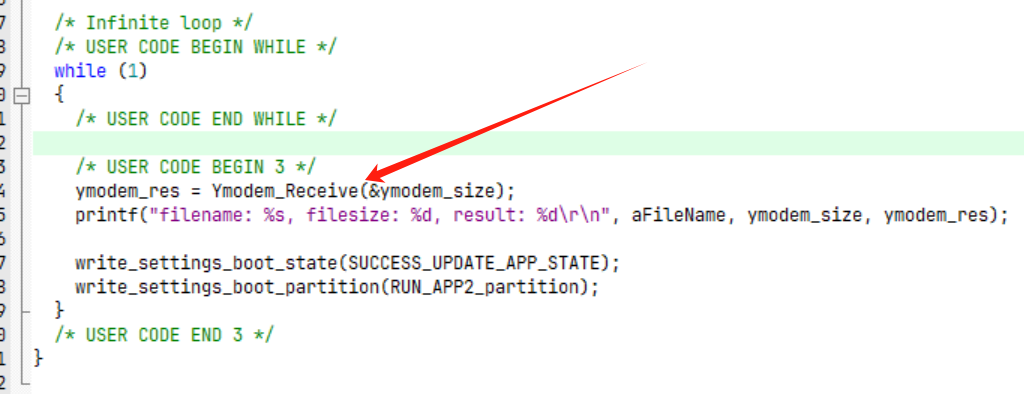
最后外部调用即可
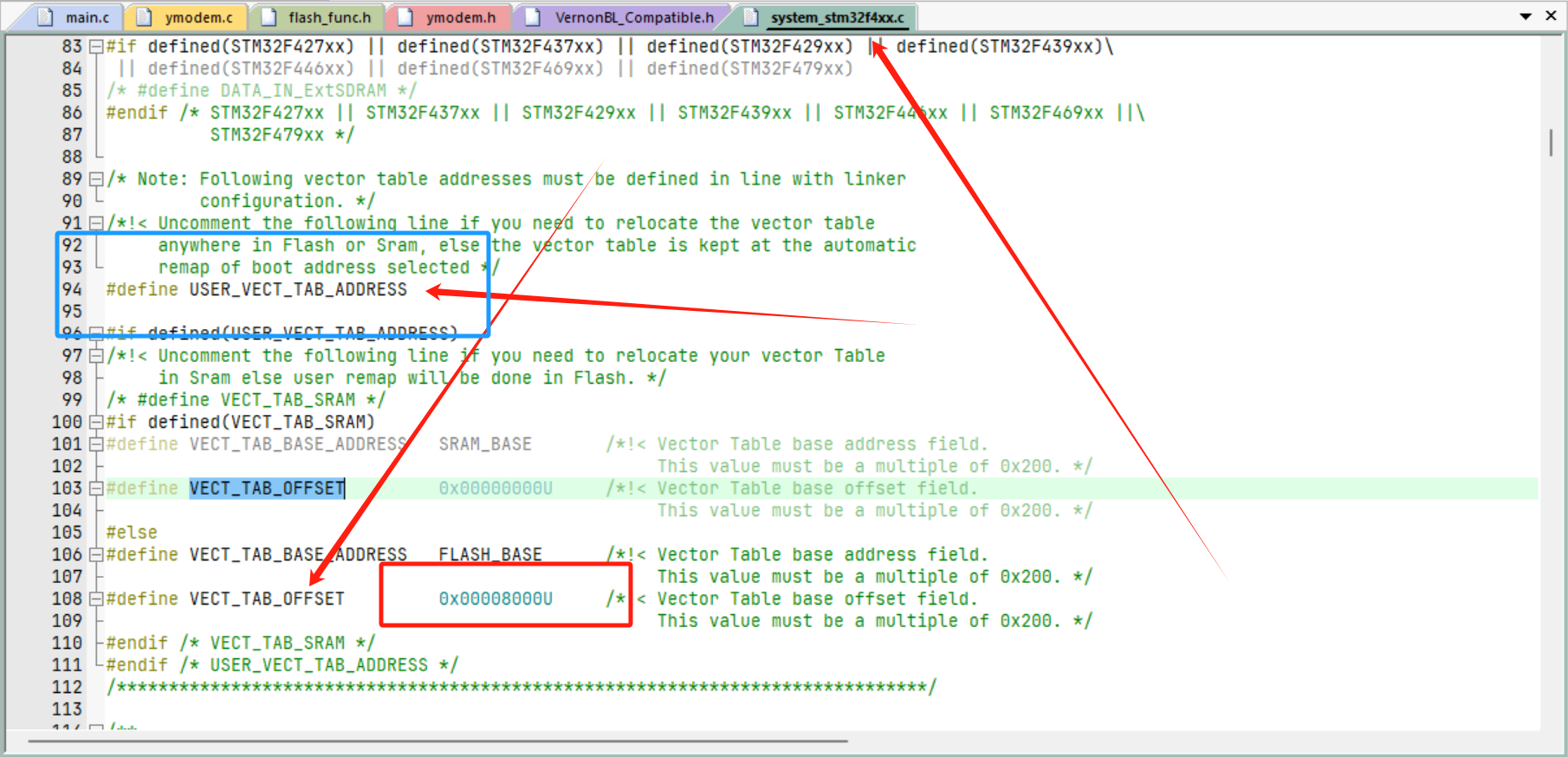
2.3 重定义向量表(重点看,有坑)
我们可以知道,我们的应用程序是写在了0x0800_8000的,那我们程序从这里开始不就可以了吗?事实也确实是这样,正常情况下应用程序应该从0x0800_0000开始,我们看下图
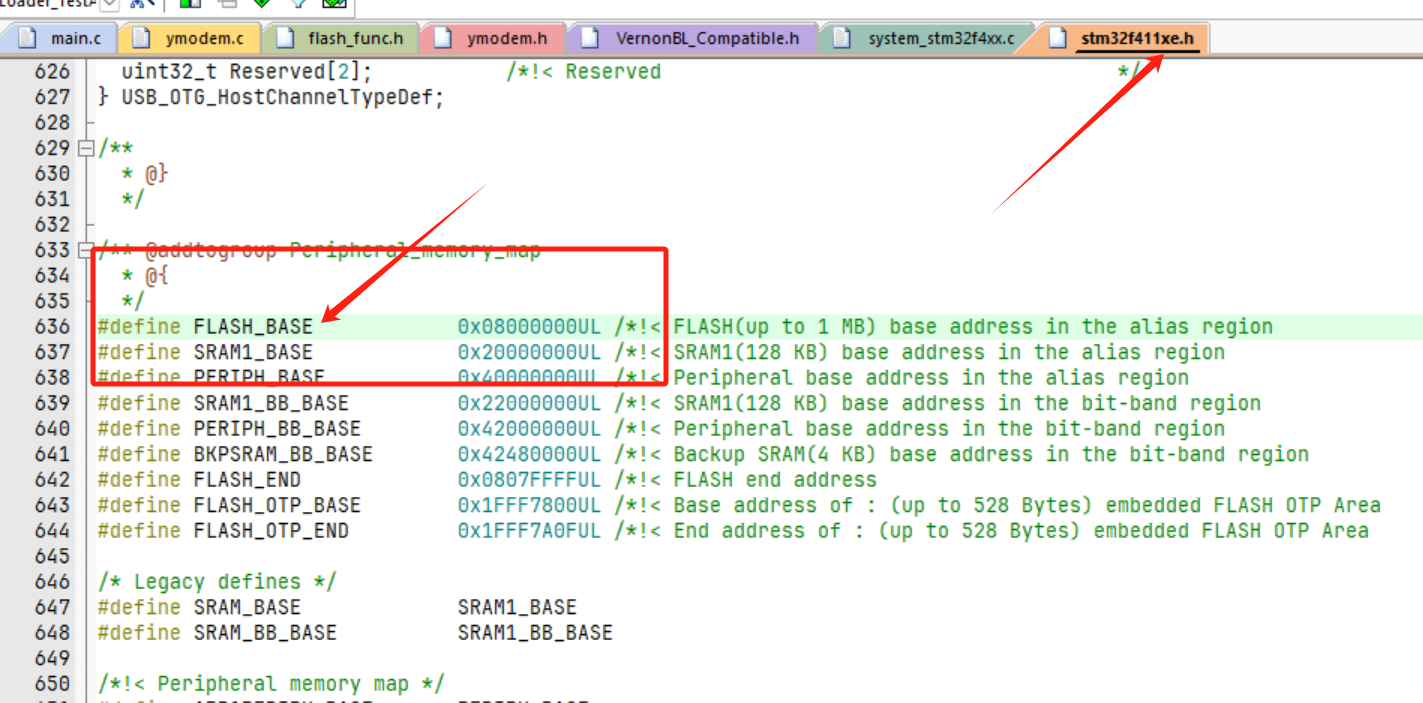
这里定义了FLASH_BASE,也确实是这样,正常情况从0x0800_0000开始,所以我们把这个变量改成0x0800_8000不就可以了吗?中断向量表也在从这个地址的开始写着。这不是完美吗?有些博主也确实是这么做的。能运行吗?能,如果不涉及DMA的话(不是说只有DMA,只是因为我写应用程序的时候用到了DMA,它出现了问题)。
所以我们坚决不能改这个!
所以我们应该改的是偏移值:
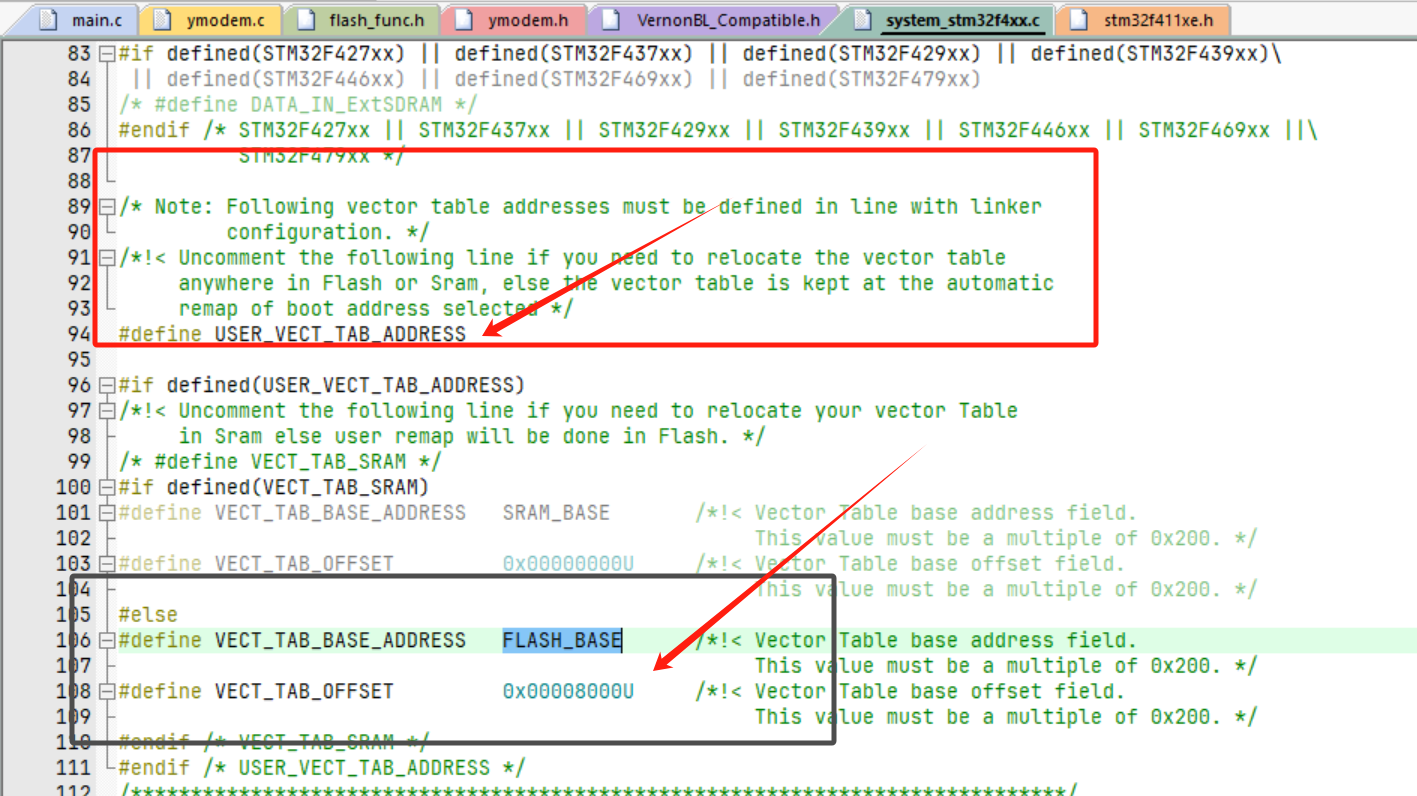
0x0000_8000是因为前两个分区占据了32k大小,换成十六进制为0x8000
其实源码中Note已经写的很清楚了,只不过我们不太注意哈哈。
这个小插曲我在学习这部分的时候所有博主都没说过,所以难免会出现这种问题,正常现象, 现在解决以免以后在工作中出现~
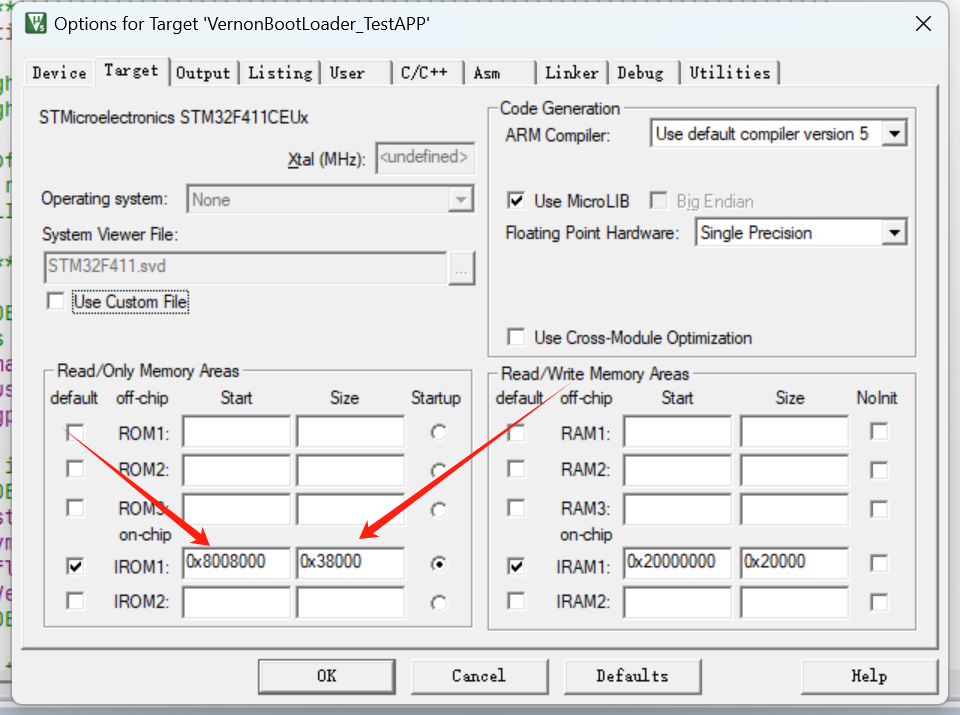
2.4 修改刷写地址
魔术棒里面修改地址和大小即可
2.5 刷写测试
这里使用软件Tera Term 5,因为其支持1k的Ymodem,刷写速度较快
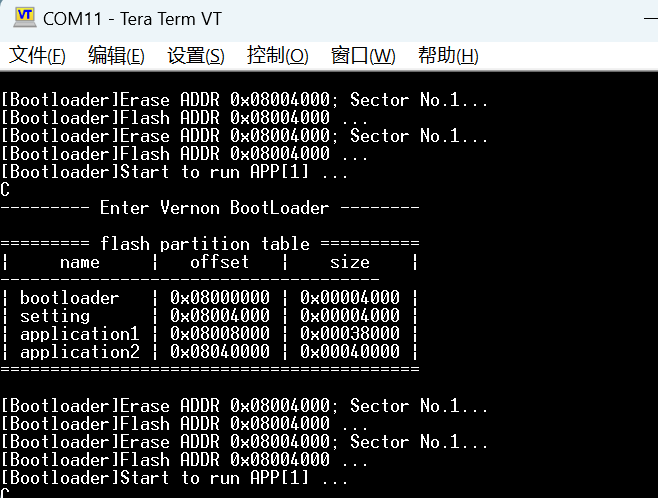
插入开发板,打开串口,可以发现Bootloader启动了,当其出现C字样的时候,表示其可以进行刷写。
选择bin文件,使用Ymodem发送
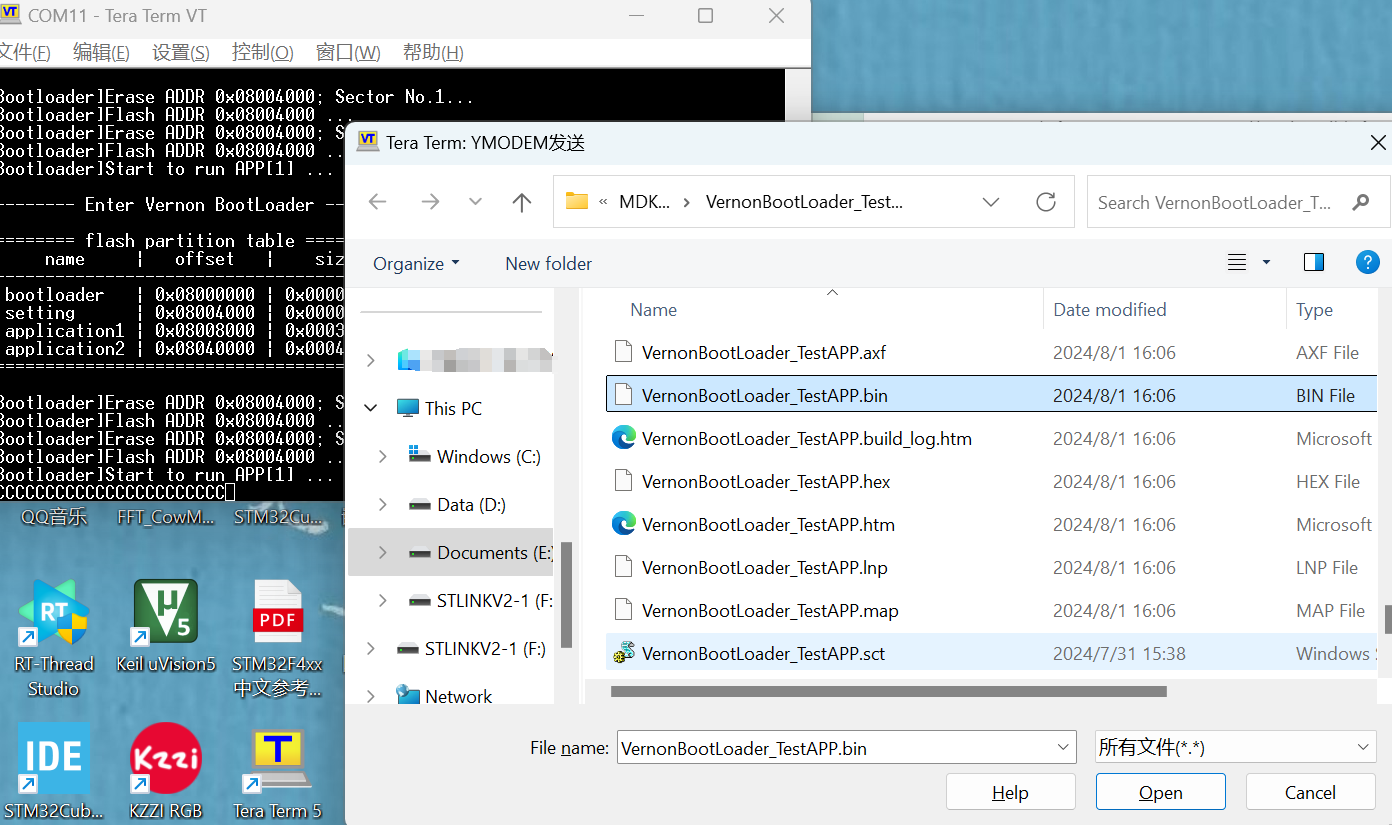
等待其刷写完成就可以了

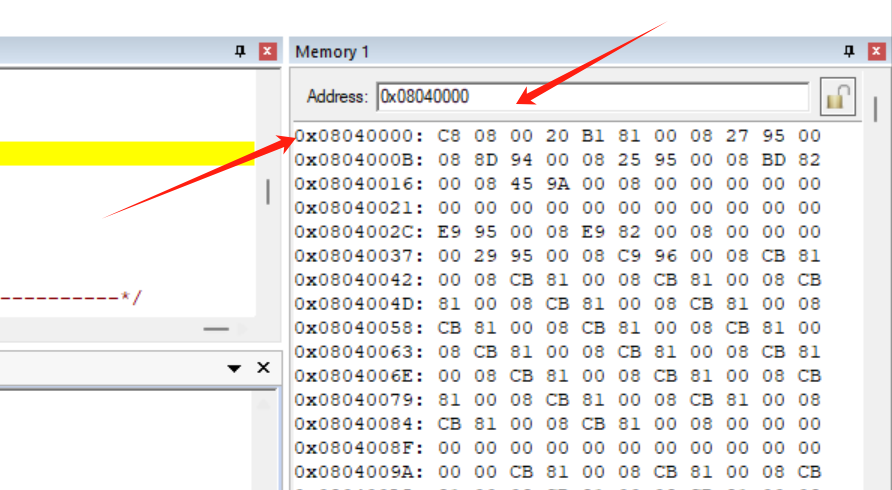
应用程序中,设置的烧写在Application_2这个分区里,所以我们可以通过keli看0x0804_0000这个地址的内容,如果有内容则刷写成功。