智能浇花机器人
目录:
第一章 :项目描述 1
1.1 项目简介 1
1.1.1 服务范围: 1
1.1.2 所处行业: 1
1.2 项目背景 1
1.3 创新点与项目特色 3
第二章 :设计说明书 4
2.1 主要构成: 4
2.1.1 循迹小车 4
2.1.2 机械臂 10
2.1.3 湿度传感器 DHT11 11
第三章 :工作原理及其功能介绍 17
3.1 工作原理 17
- 项目概要
- 项目背景
- 创新与特色
- 产品介绍
- 产品说明
1.1主要构成
- 工作原理
- 市场分析
- 行业规模
- 目标用户
- 竞争与风险
- 盈利与成本
- 融资与合作
- 融资计划
- 企业合作
- 未来展望
- 团队介绍
第一章:项目描述
1.1 项目简介
1.1.1 服务范围:
本产品名为智能浇花机器人,主要解决喜欢养花而无暇给花浇水
的家庭。
1.1.2 所处行业:
农业机械设计及其自动化。
1.2 项目背景
如今,对于浇灌系统而言,微喷技术被国际上许多国家广泛采用, 该项技术的工作原理为借助低压管道让水快速的射出,并在空气里分 散为细小的水珠,从而让这些水雾覆盖于种植物、农作物及周围的土 地表面,使得农作物不再缺乏水分。该系统具有节约水,对植物的冲 击力小等优点,不过此系统主要应用于植物种植密度大,植物柔软细
嫩的场合。
随着社会生产力的发展,人们的生活水平也在不断提高,如今千 家万户都会在自己的余暇时间里自己栽培花草。不仅美化环境,又能 净化空气。植物的生长是离不开水的,但是花盆的储水量是非常有限
的,需要定期浇水,人们也许会因为工作忙可能会忘记给植物浇水,
或者没有一定的浇花经验甚至会因为浇水过多导致植物的死亡等。这
都是非常不利于植物生长的。
目前市场上的自动浇花器的功能正在不断完善,在国内比较流行 的是玻璃和陶瓷制作而成的纯物理浇花器。这种类型的自动浇花器由 自身材质的物理结构构成,根据器皿的物理原理完成自动浇灌。因为 是通过物理原理自动渗透,这样就可能会导致很大程度的误差,从而
造成绿植不能很好的生长甚至是死亡。
本项目设计了一款智能浇花系统,使用土壤湿度传感器对土壤进 行实时监测,同时传送相关数据到用户移动设备,实现了智能浇水和 能够根据实际情况设定完成手动控制浇水这两种功能。这仅解决了绿 植无人照料容易枯死的问题,也增加了用户的体验性和趣味性。同时, 我们将单片机作为主要模块,近年来单片机的应用已经十分广泛,具 有集成度高、体积小、可靠性高的特点,深受各行各业的青睐,这为
我们系统的实现提供了可靠的支撑。
在单片机运用趋于成熟和互联网发展迅速的社会背景下,根据土 壤湿度和绿植标准湿度阈值对比的情况,利用湿度传感器等硬件和板 载 WIFI 达到智能浇水及方便用户查看绿植信息的目的。研究解决人 们种养绿植困难的问题,增加种养绿植的趣味性,让用户出门在外也
能查看绿植情况并及时完成浇水工作。
1.3 创新点与项目特色
1.3.1 用 STM32 单片机作为控制核心,利用湿度传感器作为土壤 湿度传感模块。
1.3.2 数据处理是将湿度传感器收集到的电信号转换为与之相对 应的湿度值,利用板载WIFI 实现数据的发送和接收。
1.3.3 循迹小车与水泵一体化,利用互联网模块与湿度传感器相 连,可以实现自动浇花。
1.3.4 根据花的种类不同,利用机械臂自动调整高度。
第二章:设计说明书
2.1 主要构成:
2.1.1 循迹小车
主控板
主控板功能:采集下辖传感器模块的信息,通过通讯接口下发命 令与参数从而实现对下辖驱动模块的控制。主控板5V 电源接口,连
接与稳压模块5V 输出接口,使用PH2.0-2P 进行连接。
(1)USB 口 OTG功能、可直接使用Micro USB数据线给主控板供电。
(2)两路232通信接口,可与外部232模块进行串口通信,可使用
XHB2.54-3P转 XHB2.54-3P 线进行连接。
(3)SMA 天线座,对应连接SMA天线,通过SI4463 模块与外部无线
通信。
(4)485总线通信接口,可与外部485模块进行串口通信,使用
PH2.O-2P 转 PH2.0-2P 进行连接。
(5)CAN 总线通信接口,可与外部CAN 模块进行通信,连接于各个
模块的相同CAN 接口, 一般直接连接于其他需进行通信的模块的CAN
接口,使用PH2.0-2P 转 PH2.0-2P 进行连接。
(6)TTL 串口接口,用于连接外部 TTL 串口,使用 PH2.0-4P 转
PH2.0-4P 进行连接。
(7)四路5V电压供电的传感器接口,在此套件中用于采集步进电机 复位使用的接近开关。遥控器接收器接口,用于遥控器接收器的连接,
可与外部遥控器无线通信。
电源稳压模块
功能: 1、电源接口扩展; 2、电源电压转换。电源5V 稳压模
块的3D 图如图所示,具体说明如下:
(1)XHB2.54--2P 插座:两个插座为并联,可任意连接,此插座
为12V 电源接口,连接于供电12V 模块的电源接口,使用 XHB2.54-2P
转 XHB2.54-2P 进行连接,此模块附带一根电源开关线,用于连接套 件附带电池(外部电源可从任意相同插座输入电源, VCC 为 正 极 ,GND
为负极)。
(2)PH2.0-2P 插座:两个插座为并联,可任意连接,此插座为 5V 电源接口,连接于供电5V 模块的电源接口,使用PH2.0-2P 转
PH2. 0-2P 进行连接。
驱动系统
驱动系统是机器人的动力系统,相当于人的肌肉与神经系统, 一 般由驱动装置和传动机构两部分组成。因驱动方式的不同,驱动装置 可以分成电动、液动和气动三种类型。驱动装置中的电动机、液压缸、
气缸可以与操作机直接相连,也可以通过传动机构与执行机构相连。
功能:
(1)利用电机带动轮子转动,实现其运动。
(2)利用舵机带动机械臂同时运动,使其同时自动调整高度。
直流电机驱动
功能:控制与驱动直流减速电机,拥有开环、速度闭环等多种模 式,默认模式为速度环。直流电机驱动模块的3D 图如图所示,具体
说明如下:
( 1 ) 双CAN 总线通信接口,可做转接功能,与外部CAN模块进 行通信,连接于各个模块的相同 CAN接口, 一般直接连接于其他需进
行通信的模块的CAN 接口,使用PH2.0-2P 转 PH2.0-2P 进行连接。
(2)两路驱动模块12V 电源接口,连接于稳压模块的输入端口 或者其他12V 模块的电压输入口,使用XHB2.54--2P 转 XHB2.54-2P
进行连接。
(3)TTL 串口接口,用于连接自制专用上位机软件,可改变模
块内部参数,使用USB转 TTL 串口模块。
舵机驱动模块
(1)两路驱动模块12V 电源接口,连接于稳压模块的输入端口或者 其他12V 模块的电压输入口,使用XHB2.54-2P 转 XHB2.54-2P 进行连
接。
( 2 ) 双CAN 总线通信接口,可做转接功能,与外部 CAN 模块进行通 信,连接于各个模块的相同CAN接口, 一般直接连接于其他需进行通
信的模块的CAN接口,使用PH2.O-2P 转 PH2.0-2P 进行连接。
(3)这里串口为 TTL 通讯,用于连接参数修改上位机,波特率为 115200,连接到 (DL.exe) 上 位 机 修 改 参 数 , 从 左 到 右 为 (TX,RX,GND,3.3V), 使 用PH2.0-4P 转杜邦头-4P30CM(白线-白头与黑
头)进行连接。
(4)这里串口为TTL通讯,用于连接舵机控制上位机,波特率为9600, 连接到(开源机械臂 V1.1.exe_ 上位机)控制舵机,从左到右为
(GND,RX,TX)
(5)PWM 舵机接口,总共可以连接6个舵机,从上到下为(GND、6.3V、
信号线)。
传感器系统
循线传感器模块
(1)2P 红色插座:两个2P 红色插座为并联,可任意连接,此插座为 5V 电源接口,连控于5V 稳压模块的PH2.0-2P 接口,使用PH2.O--2P
转 PH2.0--2P 进行连接。
(2)2P 黄色插座:两个2P黄色插座为并联,可任意连接,此插座为 CAN总线接口, 一般直接连接于其他需进行通信的模块的CAN接口,
使用 PH2.0-2P 转 PH2.0-2P30CM 进行连接。
(3)巡线模块检测阈值自动校准步骤如下:
a.模块正常工作状态下,长按2.5秒 SET 按键,进入检测阈值自动校
准模式,模式指示灯进行50毫秒频率的闪烁。
b. 使模块板子在场地中的色差带上面1.5厘米来回扫描,让每一路都 能扫到场地上的颜色。大约10秒时间模块自动恢复到工作模式,模 式指示灯进行1秒频率的闪烁,此时可观察8路指示灯来查看检测阈
值设置是否正确。
图像识别系统
图像识别系统主要是利用摄像头进行识别,建立自己的数据库, 将花盆颜色以及其对应花的需水量写入数据库,摄像头识别花盆颜色 后将信息传递给主控系统,由主控系统进行信息处理,自动控制其浇
水量。
2.1.2机械臂
机械臂为本机械的重要组成部分,它由舵机驱动,进行伸缩,将
花洒送到合适的位置,进行浇水。
本机器使用二型连杆机构,其由两个特点,第一由于平行四连杆 机构的作用使花洒总能保持水平状态花洒上下的角度不可改变。第二
是小臂与水平面的夹角并不会随着大臂与水平面夹角的变化而变化。
DHT11功能概述
2.1.3湿度传感器 DHT11
1.特点
(1)相对湿度和温度测量
(2)全部校准,数字输出
(3)卓越的长期稳定性
(4)无需额外部件
(5)超长的信号传输距离
(6)超低能耗
DHT11数字温湿度传感器是一款含有己校准数字信号输出的温湿 度复合传感器。它应用专用的数字模块采集技术和温湿度传感技术, 确保产品具有极高的可靠性与卓越的长期稳定性。传感器包括一个电 阻式感湿元件和一个NTC 测温元件,并与一个高性能8位单片机相连 接。因此该产品具有品质卓越、超快响应、抗干扰能力强、性价比极 高等优点。每个DHT11 传感器都在极为精确的湿度校验室中进行校 准。校准系数以程序的形式储存在OTP 内存中,传感器内部在检测信 号的处理过程中要调用这些校准系数。单线制串行接口,使系统集成 变得简易快捷。超小的体积、极低的功耗,信号传输距离可达20米 以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则。产品
为4针单排引脚封装。连接方便,特殊封装形式可根据用户需求而提
供。
2. 传 感 器 性 能
供电电压:3.3--5.5V
输出:单总线数字信号
测量范围:湿度20-90%RH, 温度0--50℃
测量精度:湿度+-5%RH, 温度+-2℃
分辨率:湿度1%RH, 温度1℃
互换性:可完全互换
长期稳定性:<±1%RH/年>
3. 电 源 引 脚
DHT11的供电电压为3-5.5V。传感器上电后,要等待1s 以越过不
稳定状态在此期间无需发送任何指令。电源引脚 (VDD,GND) 之间可
增加一个100nF的电容,用以去耦滤波。
4.串 行 接 口 ( 单 线 双 向 )
DATA 用于微处理器与DHT11之间的通讯和同步,采用单总线数 据格式, 一次通讯时间4ms 左右,数据分小数部分和整数部分,具体格 式在下面说明,当前小数部分用于以后扩展,现读出为零。操作流程如
下:
一次完整的数据传输为40bit, 高位先出。
数据格式:8bit 湿度整数数据+8bit 湿度小数数据
+8bi 温度整数数据+8bit 温度小数数据
+8bit 校验和
数据传送正确时校验和数据等于“8bit 湿度整数数据+8bit 湿度
小数数据+8bi 温度整数数据+8bit 温度小数数据”所得结果的末8位。
用户MCU 发送一次开始信号后,DHT11从低功耗模式转换到高速 模式,等待主机开始信号结束后, DHT11 发送响应信号,送出40bit 的数据,并触发一次信 号采集,用户可选择读取部分数据.从模式 下,DHT11 接收到开始信号触发一次温湿度采集,如果没有接收到主 机发送开始信号, DHT11 不会主动进行温湿度采集.采集数据后转换
到低速模式。
总线空闲状态为高电平,主机把总线拉低等待DHT11 响应,主机 把总线拉低必须大于18毫秒,保证 DHT11能检测到起始信号。DHT11 接收到主机的开始信号后,等待主机开始信号结束,然后发送80us 低 电平响应信号.主机发送开始信号结束后,延时等待20-40us 后,读取 DHT11 的响应信号,主机发送开始信号后,可以切换到输入模式,或者
输出高电平均可,总线由上拉电阻拉高。
总线为低电平,说明DHT11 发送响应信号,DHT11发送响应信号后, 再把总线拉高80us, 准备发送数据,每一bit 数据都以50us 低电平时 隙开始,高电平的长短定了数据位是0还是1.格式见下面图示.如果
读取响应信号为高电平,则 DHT11 没有响应,请检查线路是否连接正
常.当最后一bit 数据传送完毕后, DHT11 拉低总线Ous,随后总线由
上拉电阻拉高进入空闲状态。
5.DHT11 引脚
Pin
名称
注释
1
VDD
供电3-5 .5VDC
2
DATA
串行数据,单总线
3
NC
空脚,请悬空
4
GND
接地,电源负极
第三章:工作原理介绍
3.1 工作原理
本机器人拟结合湿度传感器,自动浇花系统,循迹小车和机械臂 于一体的智能浇花机器人。自动浇花系统的软件程序选用高级语言编 程,主要分为数据发送和接收模块与互联网模块。数据处理的原理是 将湿度传感器收集到的电信号转换为与之相对应的湿度值,利用板载 WIFI 实现数据的发送和接收。互联网模块是用户提前配置好系统后, 可以自由查看绿植状态和远程控制浇花系统。自动浇花系统是利用单 片机为核心来实现的,湿度检测电路是利用土壤进行设置。通过湿度 传感器检测土壤湿度,与标准值进行比对,利用互联网模块相连,当 土壤湿度达到一定值时,循迹小车便会接收到信号,依据循线传感器 检测导航布条向前行进,当图像识别系统识别到花盆时,通过提前设 定,机械臂自动调整高度,主控板再次发送指令到继电器以控制水泵
浇灌,最终成功实现智能浇水功能。
智能浇花机器人·设计说明
news2026/2/14 3:35:28













本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1953701.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

网络编程——wireshark抓包、tcp粘包
目录
一、前言
1.1 什么是粘包
1.2 为什么UDP不会粘包
二、编写程序
文件树
客户端程序
服务器程序 tcp程序
头文件 makefile
三、 实验现象
四、改进实验
五、小作业 一、前言 最近在做网络芯片的驱动,验证功能的时候需要借助wireshark这个工具&…

DataX(二):DataX安装与入门
1. 官方地址
下载地址:http://datax-opensource.oss-cn-hangzhou.aliyuncs.com/datax.tar.gz
源码地址:GitHub - alibaba/DataX: DataX是阿里云DataWorks数据集成的开源版本。 2. 前置要求 Linux JDK(1.8 以上,推荐 1.8) Python(推荐 Pyt…


机器学习 第7章-贝叶斯分类器
机器学习 第7章-贝叶斯分类器
7.1 贝叶斯决策论
贝叶斯决策论(Bayesian decision theory)是概率框架下实施决策的基本方法。对分类任务来说,在所有相关概率都已知的理想情形下,贝叶斯决策论考虑如何基于这些概率和误判损失来选择最优的类别标记。下面我…

Linux Vim全能攻略:实战代码,轻松掌握文本编辑神器
1. Vim简介与安装 1.1 Vim的历史与发展
Vim(Vi IMproved)是一款高度可配置的文本编辑器,它起源于1976年由Bill Joy开发的Vi编辑器。Vi是Unix系统上最古老的文本编辑器之一,因其强大的功能和高效的编辑方式而广受欢迎。随着时间的…
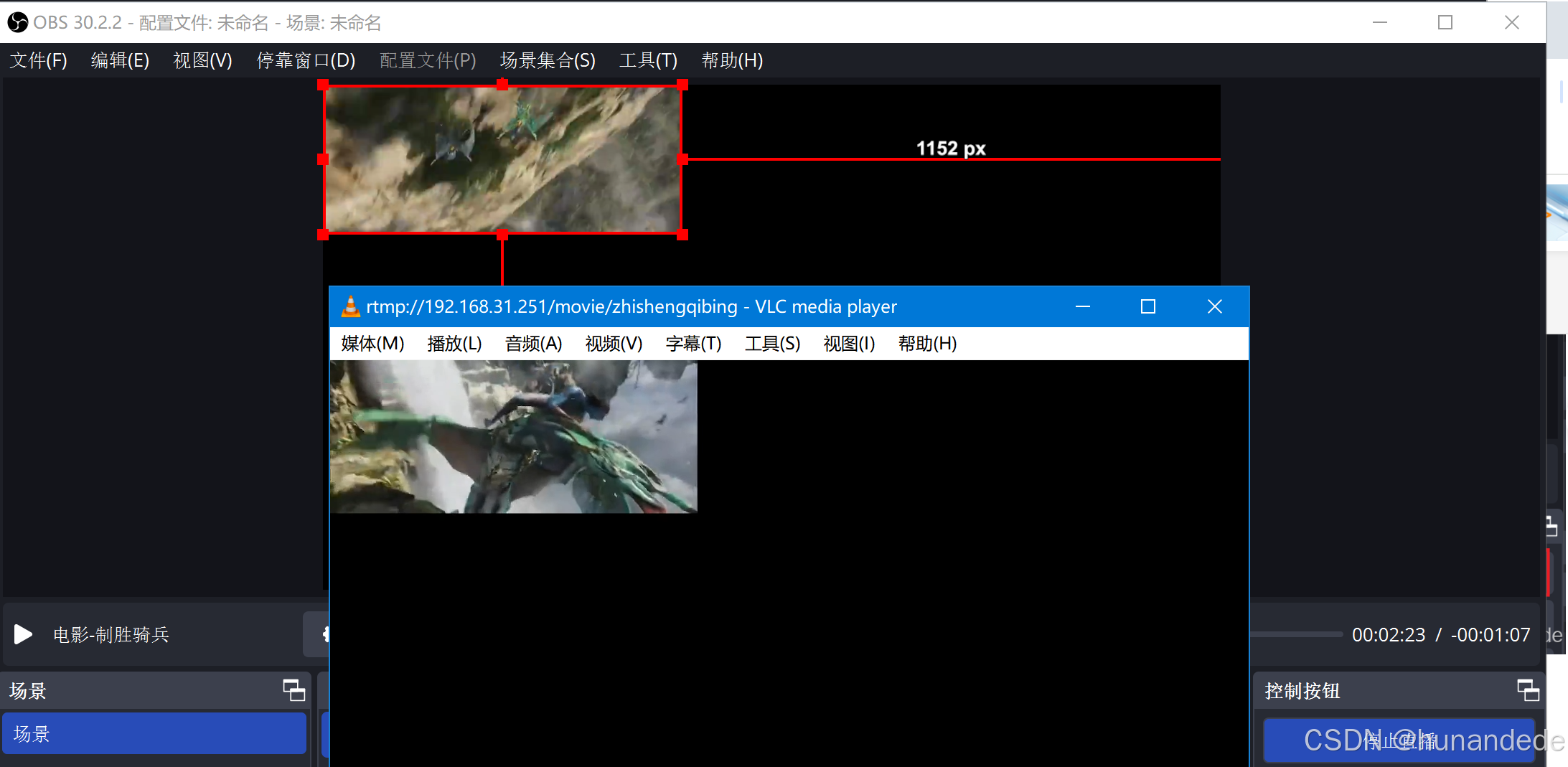
流媒体服务器一:搭建RTMP流媒体服务器搭建
1 安装和测试srs流媒体服务器 服务器:SRS(Simple RTMP Server,⽀持RTMP、HTTP-FLV,HLS) 推流端:ffmpeg OBS 拉流端:ffplay VLC srs播放器 1.1 安装srs流媒体服务器
官网 SRS (Simple Realtime Server) | SRS 码…

全栈嵌入式C++、STM32、Modbus、FreeRTOS和MQTT协议:工业物联网(IIoT)可视化系统设计思路(附部分代码解析)
项目概述
随着工业4.0时代的到来,工业物联网(IIoT)在提高生产效率、降低运营成本和实现智能制造方面得到了广泛应用。本项目旨在开发一个全面的工业物联网监控系统,能够实时监测设备的温度、压力、振动和电流等参数,并…

浅析Jeecgboot中mybatisplus不支持Postgres SKIP LOCKED语法问题
目录 1、场景及问题
2、数据库及各框架版本信息
3、错误回放
4、根因分析及确认
5、解决问题
6、总结 1、场景及问题 场景: 在调用腾讯位置服务时有用到key值,因为每个key值都有自己的额度,所以在表里存了多个key,简称key池&…

基于Java的城市公交管理系统/SSM的城市公交查询系统/计算机专业/课设
摘 要 网络技术的不断发展,使网络成为人们的日常生活中不可缺少的一部分,而城市公交管理系统是网络的一种新型体现,它以其特有的便捷和快速的特点得到了广泛的认可。当前的城市公交管理系统不仅没有建立起整体的管理系统,为企业定…

Go语言中常见的多线程同步方法
什么是线程、进程、协程
Go 源文件经过编译器处理后,会产生可执行文件,不同系统有不同的格式。可执行文件在操作系统上执行一次,就对应一个进程
进程可以理解为执行中的程序,是一个动态的概念,同一份可执行文件执行多…

Django 表单error_messages , 表单校验提示
在Django中,error_messages是表单字段的一个参数,允许你为特定的验证错误自定义错误消息。默认情况下,Django的表单字段会为常见的验证错误提供默认的错误消息。但是,你可能想要为你的应用提供更加用户友好的或者本地化的错误消息…

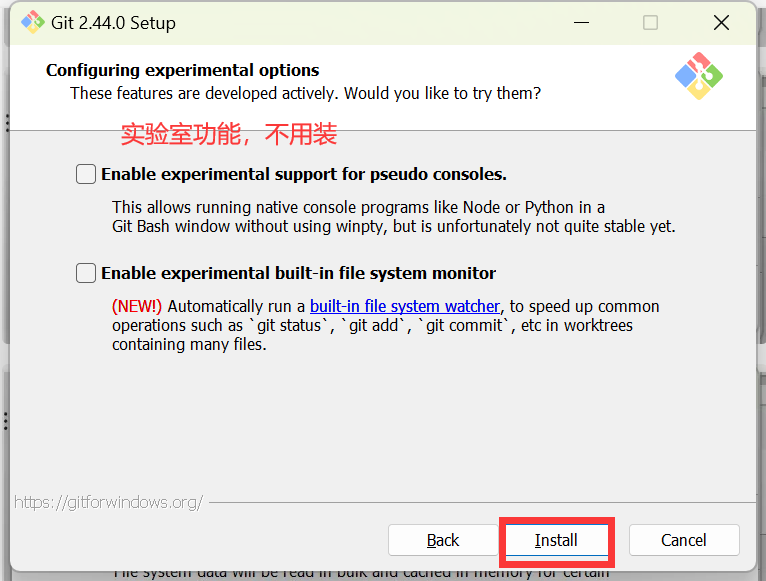
成为git砖家(2): gitk 介绍
大家好,我是白鱼。这篇我们介绍 gitk。
gitk 和 fork 界面对比
当我们在 macOS 上执行 brew install git 后, 得到了 git 命令行工具。 然而这条命令并不会安装 gitk. gitk 是 git 自带的图形化界面工具,也可以称为“穷人版 fork”…

如何穿透模糊,还原图片真实面貌
目录 图像清晰化的魔法棒:AI如何穿透模糊,还原图片真实面貌 前言 论文背景 论文思路 模型介绍 复现过程 演示视频 使用方式 本文所涉及所有资源均在传知代码平台可获取。 图像清晰化的魔法棒:AI如何穿透模糊,还原图片真实面貌 在我…

使用Docker搭建MySql的主从同步+ShardingSphere搭建Mysql的读写分离
参考课程
尚硅谷ShardingSphere5实战教程(快速入门掌握核心)_哔哩哔哩_bilibili
主服务器 创建容器 docker run -d \
-p 3306:3306 \
-v /kira/mysql/master/conf:/etc/mysql/conf.d \
-v /kira/mysql/master/data:/var/lib/mysql \
-e MYSQL_ROOT…

java学习---异常
前言
由于被分母不能为0,所以代码到int yn/m;会抛出异常,停止运行下去,但是如果是个庞大的代码,因为这种小错误而整个程序崩溃,会大大影响代码整体的健壮性,所以此时就需要我们得异常处理了 选中异常代码部…

正则采集器——前端搭建
前端使用有名的饿了么管理后台,vue3版本vue3-element-admin,首先从gitee中克隆一个vue3-element-admin模板代码vue3-element-admin: Vue3 Element Admin开箱即用的中后台管理系统前端解决方案,然后在此基础上进行开发。
1、修改vite.config.…

【深入理解SpringCloud微服务】深入理解Ribbon原理并手写一个微服务负载均衡器
深入理解Ribbon原理并手写一个微服务负载均衡器 负载均衡器理解Ribbon原理手写一个微服务负载均衡器总体设计LoadBalanceClientHttpRequestFactorySimpleLoadBalanceClientSimpleLoadBalancerLoadBalanceRulespring.factories与LoadBalanceConfig 负载均衡器
在微服务架构里面…


结构性设计模式-外观模式
一、外观模式
有些人可能炒过股票,但其实大部分人都不太懂,这种没有足够了解证券知识的情况下做股票是很容易亏钱的,刚开始炒股肯定都会想,如果有个懂行的帮帮手就好,其实基金就是个好帮手,支付宝里就有许…