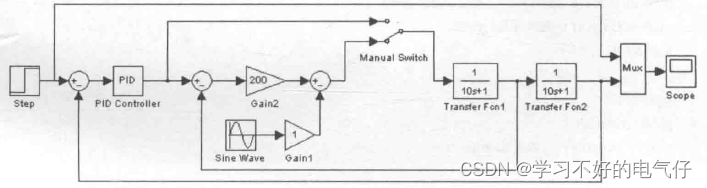
按串级控制的基本原理,采用Simulink进行编程,在连续方式下进行仿真。在串级控制中,主调节器采用PI控制,取kp =50,k i=5,副调节器采用Р控制,kp= 200。外加干扰为正弦信号sin(50t),通过切换开关的切换,分别实现常规PID控制及串级控制,它们的阶跃响应结果如图1和图2所示。
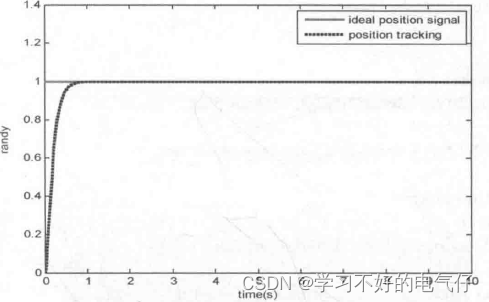
图1 串级控制的阶跃响应
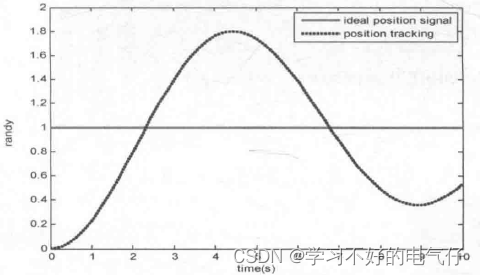
图2 传统PID控制的阶跃响应
仿真图:
作图程序:chap3_2plot.m
close all;
plot(ty(:,1),r,ty(:,2),'k:','linewidth' 2);
xlabel('time(s));ylabel('T and y);
legend('ideal position signal','position tracking');
作图程序:chap3_2plot.m
close all;
plot(ty(:,1),r,ty(:,2),'k:','linewidth' 2);
xlabel('time(s));ylabel('T and y);
legend('ideal position signal','position tracking');
作图程序:chap3_2plot.m
close all;
plot(ty(:,1),r,ty(:,2),'k:','linewidth' 2);
xlabel('time(s));ylabel('T and y);
legend('ideal position signal','position tracking');