目录
一、概述
二、代码实现
2.1关键函数
2.2完整代码
三、实现效果
3.1原始点云
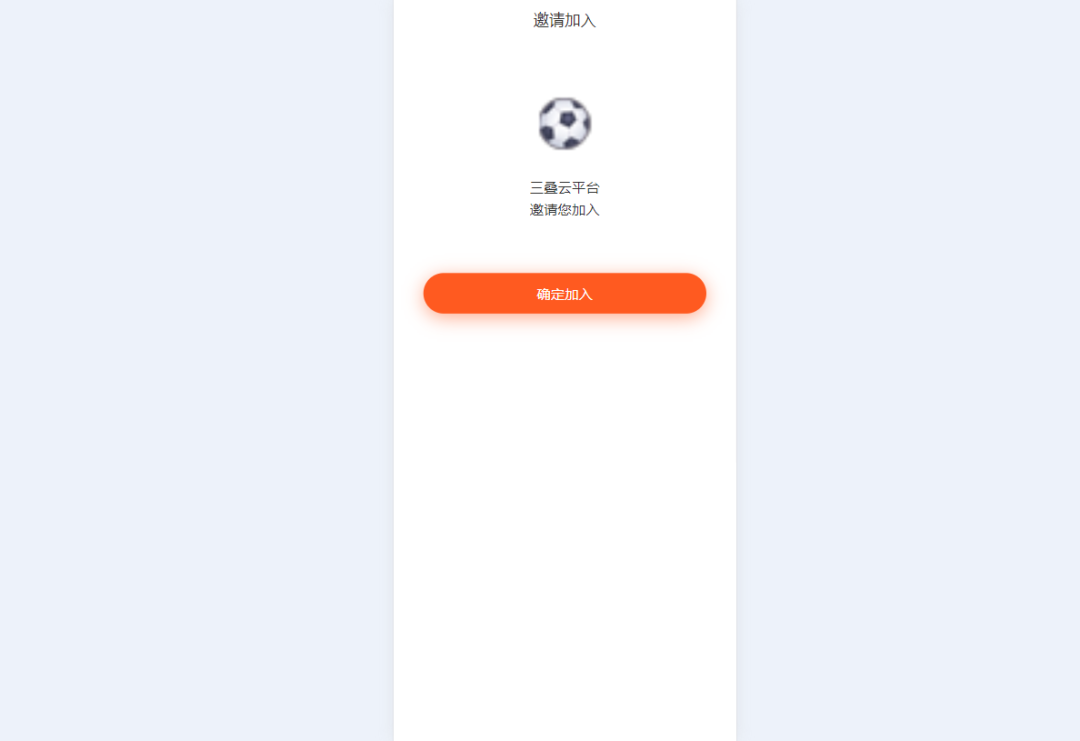
3.2投影后点云
前期试读,后续会将博客加入下列链接的专栏,欢迎订阅
Open3D点云算法与点云深度学习案例汇总(长期更新)-CSDN博客
一、概述
将点云投影到球面是一个常见的几何操作,尤其在计算机视觉和3D图形学中。此篇博客将演示如何使用 Open3D 和 Python 将点云投影到一个给定的球面上。
假设我们有一个点云,我们想要将其投影到一个半径为 R 的球面上。我们可以通过以下步骤来实现这一操作:
1.生成或读取点云数据:
使用 Open3D 生成或读取点云数据。
2.计算投影向量:
计算每个点到球心的向量,并将其归一化,使得其长度等于球的半径。
3.替换点云数据:
用归一化后的向量替换原始点云的坐标。
4.可视化结果:
使用 Open3D 可视化投影后的点云数据。
二、代码实现
2.1关键函数
在 project_to_sphere 函数中,首先计算每个点到球心的向量,并将其归一化,使得其长度等于球的半径。具体来说,通过计算每个点的范数(即点到球心的距离),然后用每个点的坐标除以其范数,得到归一化的向量。
def project_to_sphere(pcd, radius):
"""
将点云投影到给定半径的球面上。
参数:
pcd (open3d.geometry.PointCloud): 输入点云。
radius (float): 球的半径。
返回:
open3d.geometry.PointCloud: 投影后的点云。
"""
points = np.asarray(pcd.points)
# 计算点到球心的向量并归一化
norms = np.linalg.norm(points, axis=1, keepdims=True)
projected_points = (points / norms) * radius
# 创建新的点云
projected_pcd = o3d.geometry.PointCloud()
projected_pcd.points = o3d.utility.Vector3dVector(projected_points)
return projected_pcd2.2完整代码
import open3d as o3d
import numpy as np
def generate_random_point_cloud(num_points=1000):
"""
生成随机点云数据。
参数:
num_points (int): 点的数量。
返回:
open3d.geometry.PointCloud: 生成的点云。
"""
points = np.random.uniform(-1, 1, (num_points, 3))
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points)
return pcd
def project_to_sphere(pcd, radius):
"""
将点云投影到给定半径的球面上。
参数:
pcd (open3d.geometry.PointCloud): 输入点云。
radius (float): 球的半径。
返回:
open3d.geometry.PointCloud: 投影后的点云。
"""
points = np.asarray(pcd.points)
# 计算点到球心的向量并归一化
norms = np.linalg.norm(points, axis=1, keepdims=True)
projected_points = (points / norms) * radius
# 创建新的点云
projected_pcd = o3d.geometry.PointCloud()
projected_pcd.points = o3d.utility.Vector3dVector(projected_points)
return projected_pcd
# 生成随机点云
num_points = 1000
pcd = generate_random_point_cloud(num_points)
# 将点云投影到半径为1的球面上
radius = 1.0
projected_pcd = project_to_sphere(pcd, radius)
# 可视化原始点云和投影后的点云
o3d.visualization.draw_geometries([pcd], window_name="Original Point Cloud", width=800, height=600, left=50, top=50)
o3d.visualization.draw_geometries([projected_pcd], window_name="Projected Point Cloud on Sphere", width=800, height=600, left=850, top=50)
# 保存投影后的点云
# o3d.io.write_point_cloud("projected_sphere.pcd", projected_pcd)
三、实现效果
3.1原始点云

3.2投影后点云