参考资料
2.1 DCU软件栈(DCU ToolKit, DTK) · DCU 开发与使用文档 (hpccube.com)
DCU软件栈
DCU的软件栈—DCU Toolkit(DTK)

-
HIP(Heterogeneous-Compute Interface for Portability)是AMD公司在2016年提出的符合CUDA编程模型的、自由的、开源的C++编程接口和核函数语言。
在目前的DTK中,使用HIP编程是进行DCU应用开发最主要的方式。
-
OpenMP(Open Multi-Processing)是共享内存的多处理器并行应用编程接口,它通过在C/C++或Fortran代码中加入编译器导语(directive)的方式让编译器将指定代码段并行化,此外还包含一系列函数形式的编程接口。
使用OpenMP是进行DCU应用开发便捷有效的方式。
-
OpenACC(Open ACCelerators)可以看作OpenMP针对异构设备的开发分支。
在目前的DTK中,支持在C/C++中使用OpenACC的部分功能。
数学库
| HIP库 | CUDA库 | 功能 |
|---|---|---|
| hipBLAS | cuBLAS | 基础线性代数库 |
| hipFFT | cuFFT | 快速傅里叶变换库 |
| hipRAND | cuRAND | 随机数生成库 |
| hipSOLVER | cuSOLVER | 矩阵求解库 |
| hipSPARSE | cuSPARSE | 稀疏矩阵线性代数库 |
| Thrust | Thrust | C++STL形式的并行算法库 |
| hipCUB | CUB | HIP形式的并行算法库 |
| RCCL | NCCL | 多DCU的通讯库 |
| MIOpen | cuDNN | 深度学习基础数学库 |
| HIP RTC | NVRTC | 运行时编译库 |
DTK中包含针对DCU开发的llvm编译器套件,DTK中对于HIP、OpenMP、OpenACC的支持都是由这套编译器套件提供。为方便编译HIP代码,DTK中还提供了脚本工具hipcc,hipcc可以在内部帮助开发者完成预编译器、编译器、链接器的参数配置与调用,使开发者只需要使用简单的编译命令即可完成编译。
- 性能分析工具hipprof
- 调试工具hipgdb
- DCU状态监控工具rocm-smi。
使用C/C++编写DCU程序
初识并行计算
对2G个x计算y=ax^2+bx+c
代码
#include <cstdio>
#include <cstdlib>
int main()
{
int N = 256 * 1024 * 1024; // 数组长度256M
int size = N * sizeof(float); // 内存空间1GB
// 分配内存空间
float *x = (float *) malloc(size);
float *y = (float *) malloc(size);
// 初始化a,b,c
float a = 2.5, b = 2.0, c = 1.0;
// 循环8次完成
for (int j = 0; j < 8; j++) {
// 初始化x
for (int i = 0; i < N; i++) {
x[i] = 2.0;
}
// 计算y = ax^2 + bx + c;
for (int i = 0; i < N; i++) {
y[i] = a * x[i] * x[i] + b * x[i] + c;
}
// 检查结果
bool correct = true;
for (int i = 0; i < N; i++) {
if (y[i] != 15.0) {
correct = false;
break;
}
}
if (correct) {
printf("Loop %d: Correct results.\n", j+1);
} else {
printf("Loop %d: Wrong results.\n", j+1);
}
}
// 释放空间
free(x);
free(y);
return 0;
}
运行
添加计时器,先创建timer.h
#ifndef TIMER_H
#define TIMER_H
#include <sys/time.h>
struct my_timer
{
timeval ts, te; //起始时刻,终止时刻
float dt; // 时间间隔,单位毫秒(ms)
void start(){
gettimeofday(&ts, NULL);
}
void stop(){
gettimeofday(&te, NULL);
long int dt_sec = te.tv_sec - ts.tv_sec;
long int dt_usec = te.tv_usec - ts.tv_usec;
dt = dt_sec * 1.0e3 + dt_usec / 1.0e3;
}
};
#endif
在源程序添加计时器
#include <cstdio>
#include <cstdlib>
#include "timer.h"
int main()
{
int N = 256 * 1024 * 1024; // 数组长度256M
int size = N * sizeof(float); // 内存空间1GB
// 计时器
my_timer timer;
double t_init = 0.0;
double t_calc = 0.0;
double t_chck = 0.0;
// 分配内存空间
float *x = (float *) malloc(size);
float *y = (float *) malloc(size);
// 初始化a,b,c
float a = 2.5, b = 2.0, c = 1.0;
// 循环8次完成
for (int j = 0; j < 8; j++) {
// 初始化x
timer.start();
for (int i = 0; i < N; i++) {
x[i] = 2.0;
}
timer.stop();
t_init += timer.dt;
// 计算y = ax^2 + bx + c;
timer.start();
for (int i = 0; i < N; i++) {
y[i] = a * x[i] * x[i] + b * x[i] + c;
}
timer.stop();
t_calc += timer.dt;
// 检查结果
timer.start();
bool correct = true;
for (int i = 0; i < N; i++) {
if (y[i] != 15.0) {
correct = false;
break;
}
}
if (correct) {
printf("Loop %d: Correct results.\n", j+1);
} else {
printf("Loop %d: Wrong results.\n", j+1);
}
timer.stop();
t_chck += timer.dt;
}
printf("Initialization took %8.3f ms.\n", t_init);
printf("Calculation took %8.3f ms.\n", t_calc);
printf("Validation took %8.3f ms.\n", t_chck);
// 释放空间
free(x);
free(y);
return 0;
}
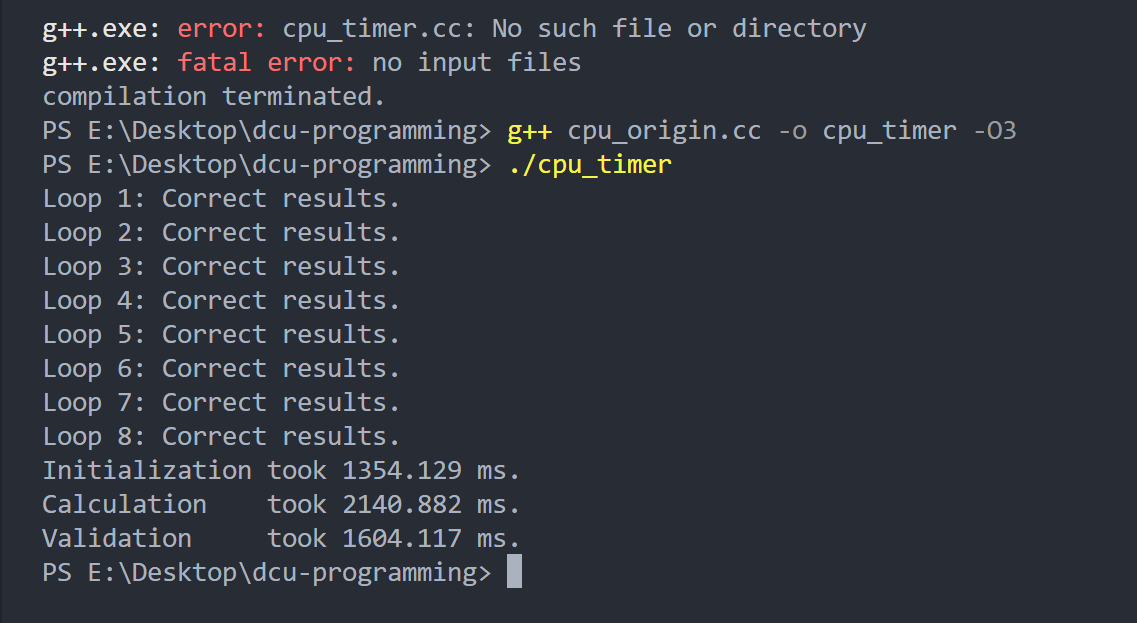
运行
使用多核来优化运行速度,通过OpenMP实现
#pragma omp parallel for
for (int i = 0; i < N; i++) {
x[i] = 2.0;
}
重新运行需要加上-fopenmp
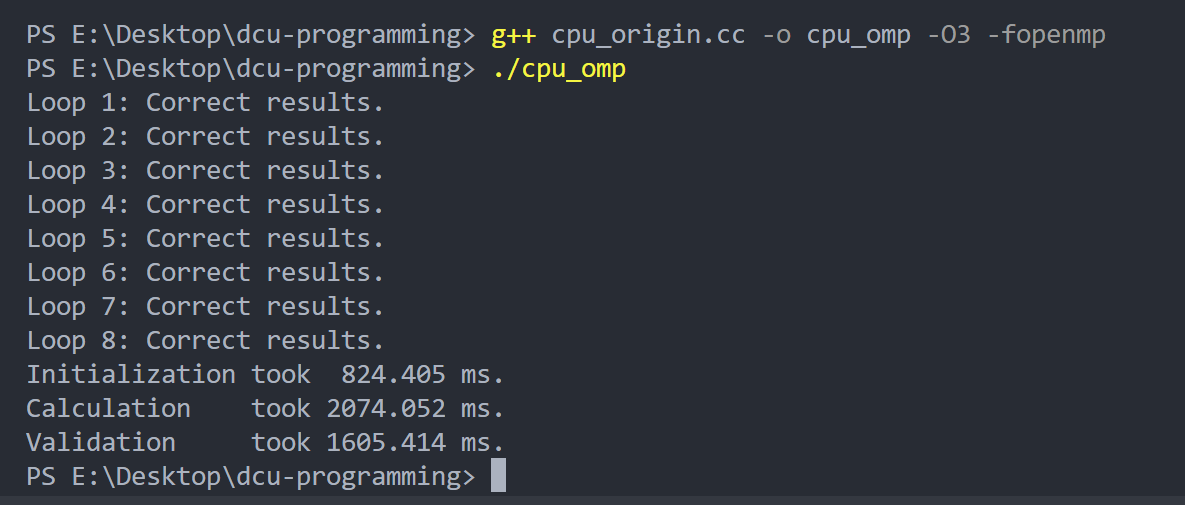
初始化过程变快了
OMP_NUM_THREADS为3,分配3个核心工作看看
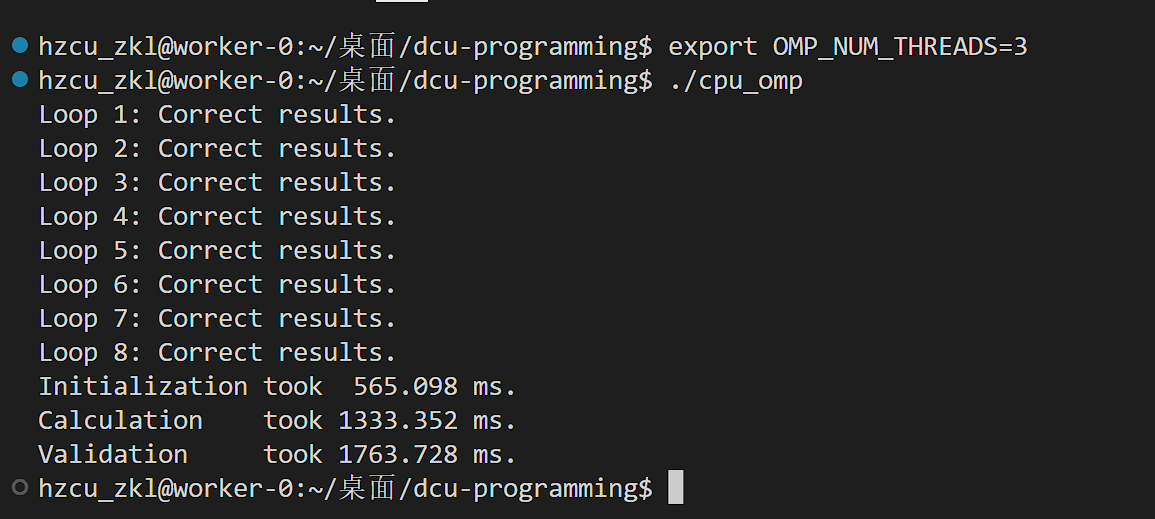
可以看到更快了
为DCU编写代码
#include <hip/hip_runtime.h>
#include <cstdio>
#include <cstdlib>
#include "timer.h"
//编写for的核函数
__global__ void init(float *x,int N){
int i = blockIdx.x*blockDim.x+threadIdx.x;//一维线程索引
if(i<N){
x[i] = 2.0;
}
}
__global__ void calculate(float *x, float *y, float a,
float b, float c, int N)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
if (i < N) {
y[i] = a * x[i] * x[i] + b * x[i] + c;
}
}
int main()
{
int N = 256 * 1024 * 1024; // 数组长度256M
int size = N * sizeof(float); // 内存空间1GB
// 分配内存空间
//float *x = (float *)malloc(size);
float *y = (float *)malloc(size);
//DCU内存管理
float *dx,*dy;
hipMalloc(&dx,size);
hipMalloc(&dy,size);
// 计时器
my_timer timer;
double t_init = 0.0;
double t_calc = 0.0;
double t_chck = 0.0;
// 初始化a,b,c
float a = 2.5, b = 2.0, c = 1.0;
// 循环8次完成
for (int j = 0; j < 8; j++){
//初始化x
//调用核函数
int blockSize=256;
int numBlocks=(N+blockSize-1)/blockSize;
timer.start();
init<<<numBlocks,blockSize>>>(dx,N);
timer.stop();
t_init += tiemr.dt;
// 计算y = ax^2 + bx + c;
timer.start();
calculate<<<numBlocks, blockSize>>>(dx,dy,a,b,c,N);
timer.stop();
t_calc += timer.dt;
// 检查结果
timer.start();
bool correct = true;
hipMemcpy(y, dy, size, hipMemcpyDeviceToHost);
for (int i = 0; i < N; i++) {
if (y[i] != 15.0) {
correct = false;
break;
}
}
if (correct) {
printf("Loop %d: Correct results.\n", j+1);
} else {
printf("Loop %d: Wrong results.\n", j+1);
}
timer.stop();
t_chck += timer.dt;
}
printf("Initialization took %8.3f ms.\n", t_init);
printf("Calculation took %8.3f ms.\n", t_calc);
printf("Validation took %8.3f ms.\n", t_chck);
// 释放空间
hipFree(dx);
hipFree(dy);
free(y);
return 0;
}
运行
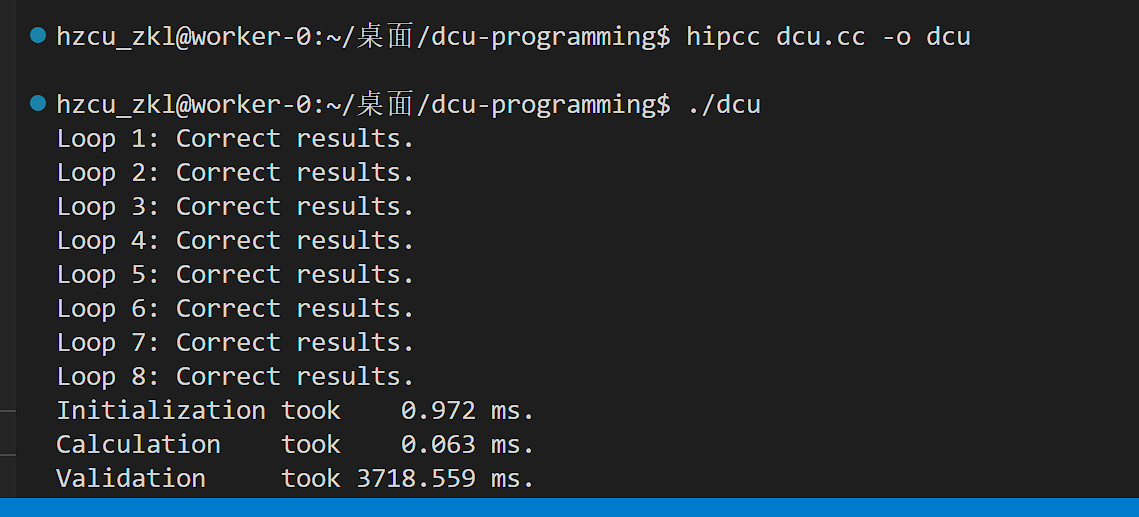
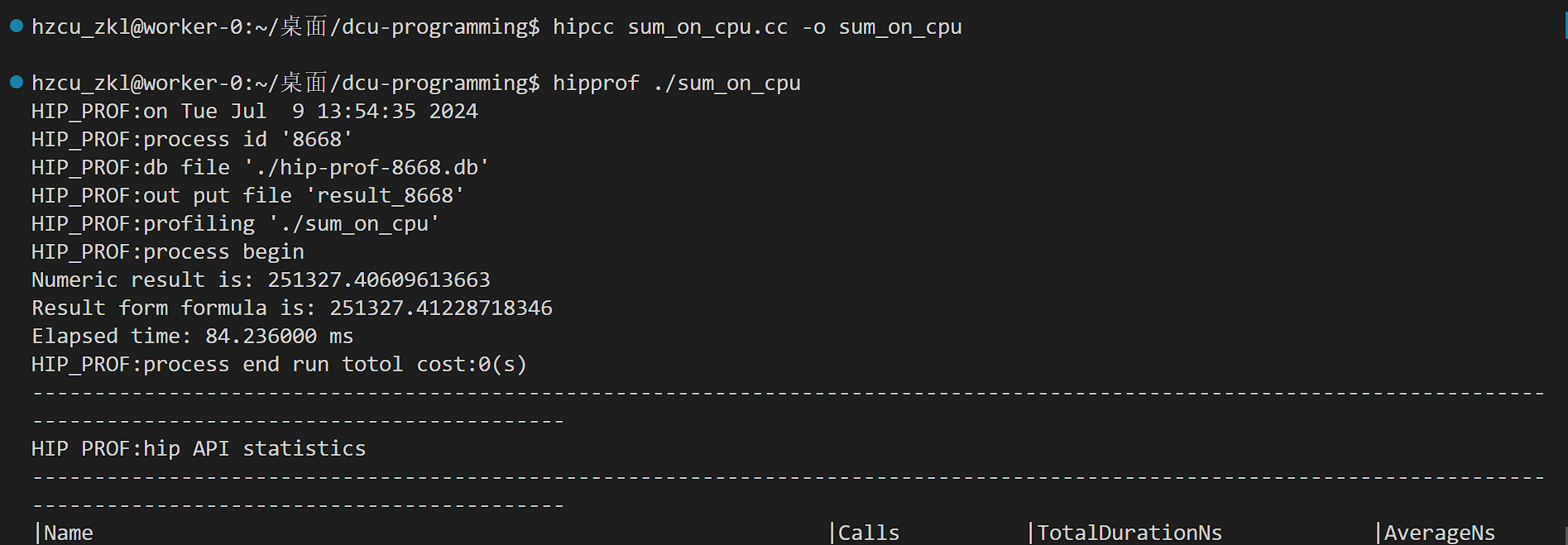
这里我们的计时器显示的结果是有问题的。我们用DTK软件栈中的性能分析工具来看看真实的性能。
hipprof ./dcu
多了两张表格,表格里记录了我们调用的HIP编程接口的耗时以及核函数的耗时。
计时器为什么不准呢?这是因为DCU执行核函数与CPU执行其他部分是异步的。意思也就是,CPU把任务丢给DCU后就stop了,所以前两个阶段时间很短。
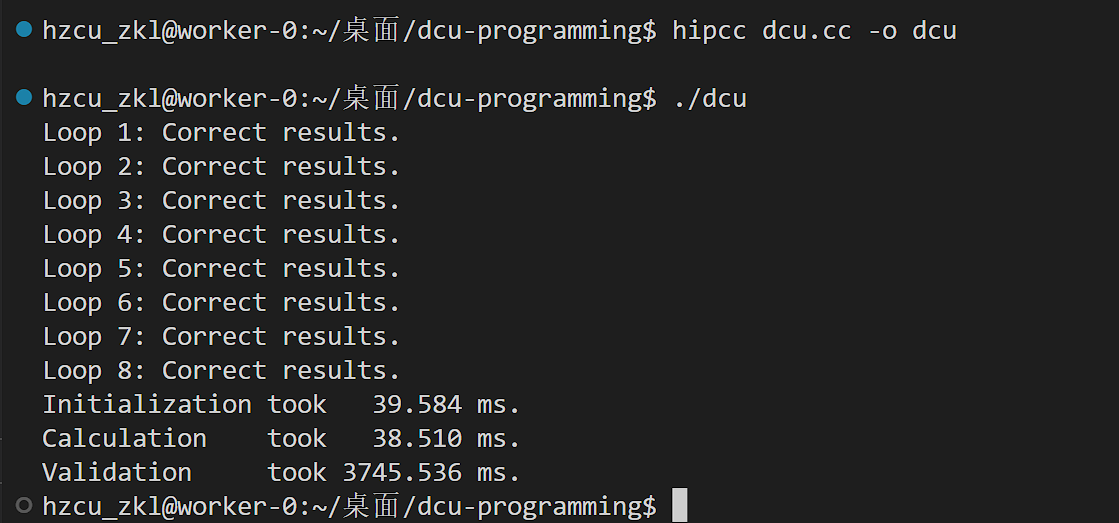
为了让计时器记录准确的核函数执行时间,我们需要在timer.stop()之前让CPU与DCU同步,通过调用HIP运行时编程接口hipDeviceSynchronize()
对于init和caculate都修改一下
timer.start();
init<<<numBlocks, blockSize>>>(dx,N);
hipDeviceSynchronize();
timer.stop();
当CPU执行到这个接口时会等待DCU上的现有的任务执行完毕后再继续。
重新编译运行
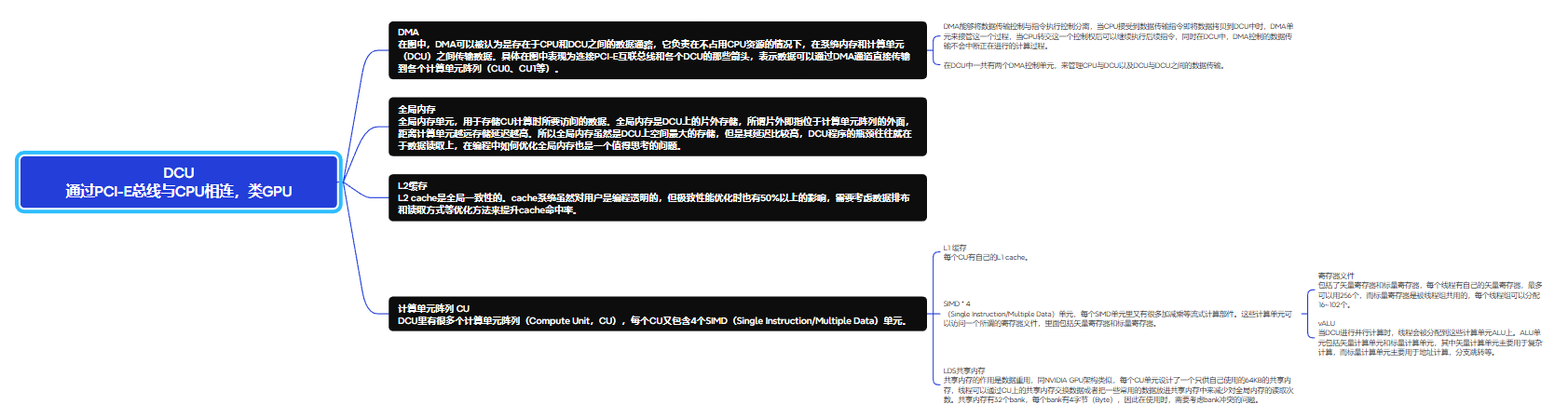
DCU编程概述
程序是用两种处理器执行的,这称为异构计算(heterogeneous computing)。CPU和DCU的关系是主从关系,会用一个抽象的概念主机(host)来指代CPU,设备(device)来指代DCU。
对于设备端执行的核函数,我们需要单独编写代码,并在核函数前加__global__修饰符以区分,核函数中还可以调用在设备端执行的函数,这些函数前需要加__device__修饰符。主机调用核函数后会继续执行后面的主机端代码,而设备端则会根据配置启动多个线程同时执行核函数。
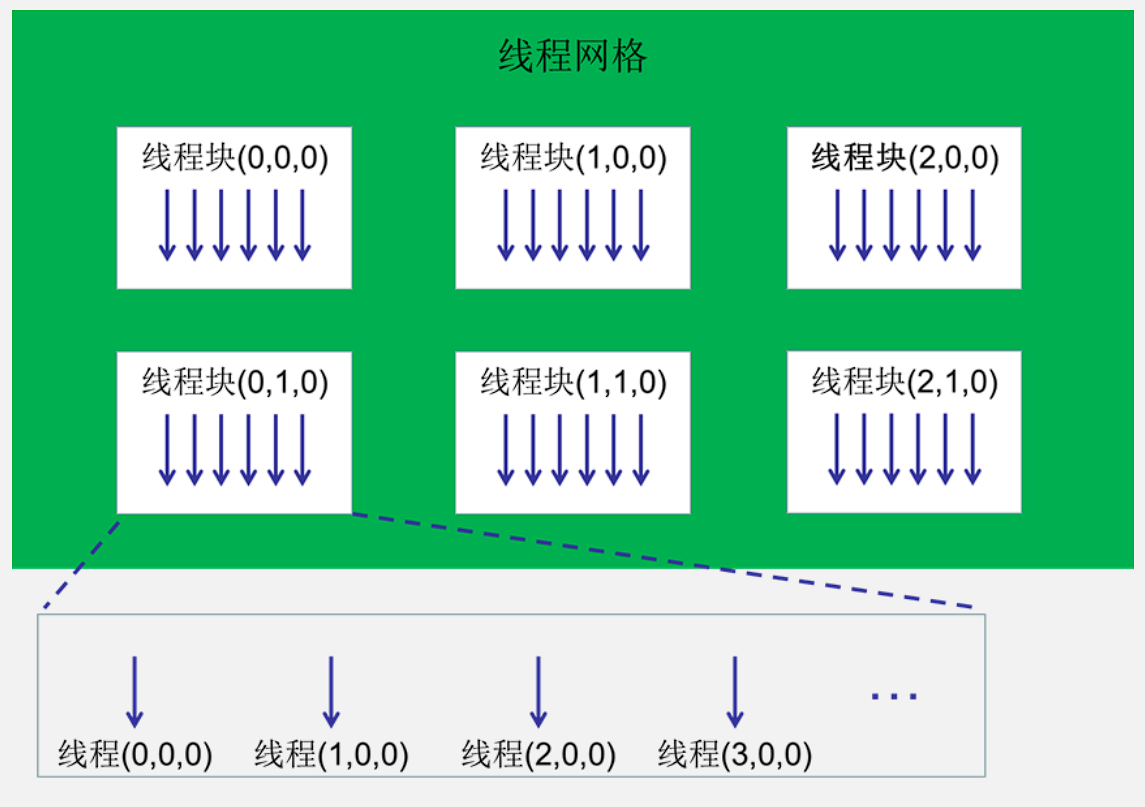
核函数启动参数(Kernel launch configuration),我们通过将它们置于核函数后的三个尖括号之中,让设备以这样的线程组织结构,启动256M个线程,每个线程都执行一遍init函数,换言之将init函数执行了256M次。
线程网格包含的线程块数目(gridDim)、线程块在线程网格中的编号/索引(blockIdx)、线程块包含的线程数(blockDim)、线程在线程块中的编号/索引(threadIdx)
内存的层次结构
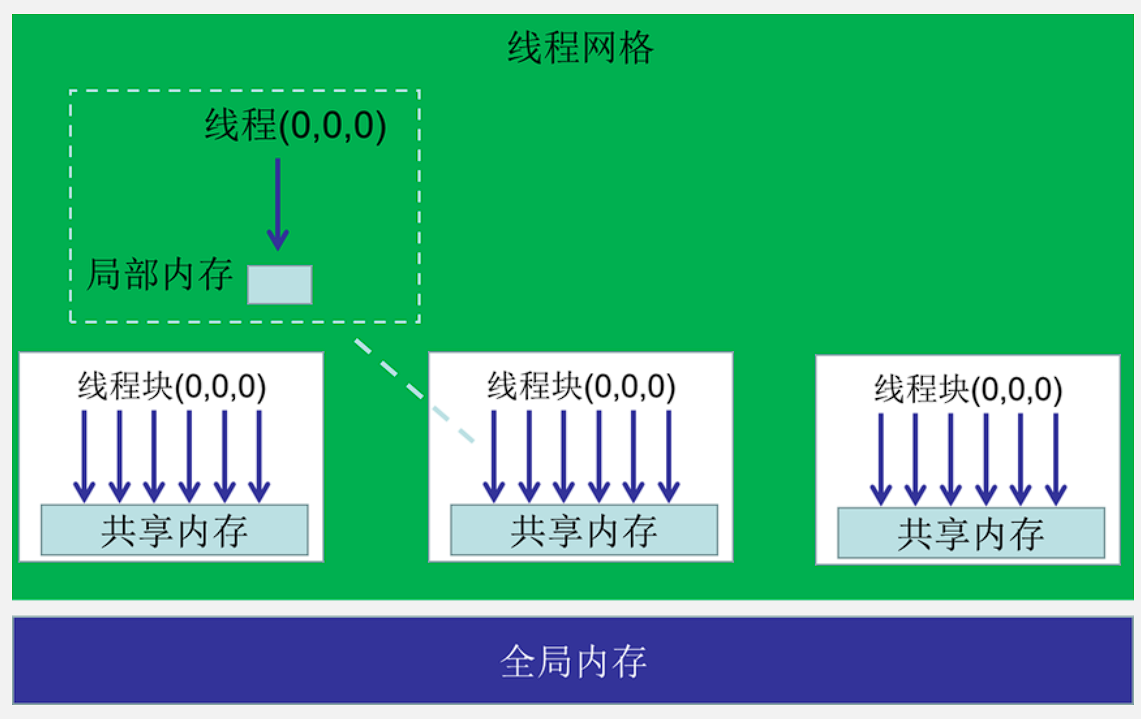
也就是另一篇博客里的私有局部内存、共享内存、全局内存。
从模型到硬件就像另一篇里的
单个线程块中的线程有唯一的ID,按以下公式计算:

这个公式怎么出来的?
偏移:偏移是指线程相对于某个起点的距离。在这里,偏移的目的是计算线程在一维线性内存中的位置。
我们需要将三维索引 threadIdx(x, y, z) 转换成一维索引(线性索引),以便在一维线性内存中访问。
所以转换之后是这样的,像是三维数组转为一维数组
-
x维
threadIdx.x直接表示线程在 x 维度上的位置,它不需要乘其他尺寸。 -
y维
threadIdx.y * blockDim.x -
z维
threadIdx.z * blockDim.x * blockDim.y
程按线程ID以64个为一组划分在不同的线程束中,比如对于一维的(128,1,1)线程块,threadIdx.x为0到63的线程在同一线程束,64到127的在另一线程束;对于二维的(16,16,1)线程块,按threadIdx.y从0到3,4到7,8到11,12到15划分在4个线程束上。
这段话什么意思?
一个DCU中线程束是64个线程,所以对于一维来说,128个分为两个线程束;对于二维来说,16*16=256个线程,每4行就是一个线程束。
并行规约
计算积分公式,计算一个从0到40000π的积分

#include <cstdio>
#include "timer.h"
#include <cmath>
// 定义精度
#ifdef DOUBLE_PREC
typedef double real;
#define SIN(x) sin(x)
#define COS(x) cos(x)
#else
typedef float real;
#define SIN(x) sinf(x)
#define COS(x) cosf(x)
#endif
// 用积分公式计算
double F(double x)
{
double F = x/4 + sin(2*x)/16 - sin(4*x)/16 -sin(6*x)/48;
return F;
}
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
int N = 1e8;
real dx = (upper_bound - lower_bound) / N;
double Integral = 0.0;
my_timer timer;
timer.start();
// 数值计算 \int sin^2(2x)*cos^2(2x) dx
for (int i = 0; i < N; i++) {
real x = (i + 0.5) * dx;
// 减少乘法次数
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
Integral += sin_2x * cos_x * dx;
}
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(upper_bound) - F(lower_bound));
printf("Elapsed time: %8.6f ms\n",timer.dt);
return 0;
}
单精度版本编译运行
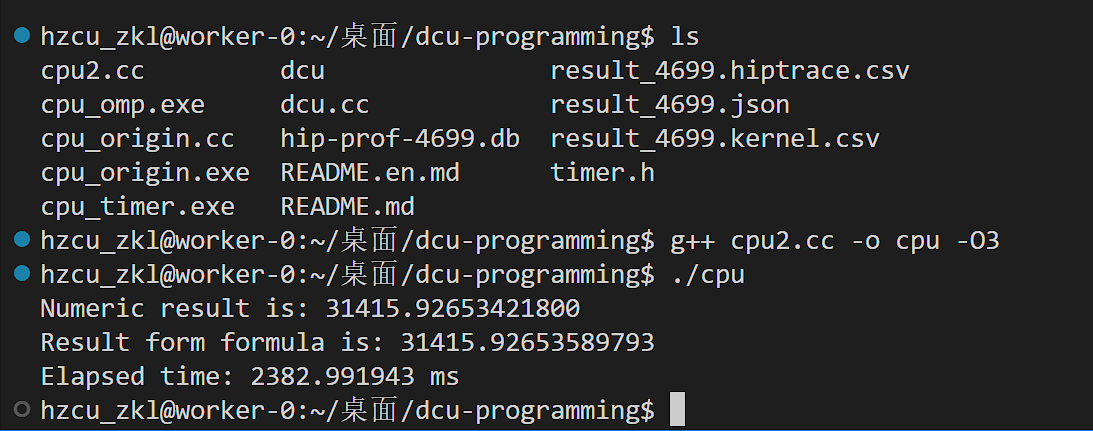
双精度版本编译运行

改为DCU版本的代码
#include <cstdio>
#include "timer.h"
#include <cmath>
#include <hip/hip_runtime.h>
// 定义精度
#ifdef DOUBLE_PREC
typedef double real;
#define SIN(x) sin(x)
#define COS(x) cos(x)
#else
typedef float real;
#define SIN(x) sinf(x)
#define COS(x) cosf(x)
#endif
//前面都一样
// 用积分公式计算
double F(double x)
{
double F = x/4 + sin(2*x)/16 - sin(4*x)/16 -sin(6*x)/48;
return F;
}
// DCU 核函数
__global__
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
if (i < N) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
*Integral += sin_2x * cos_x * dx;
}
}
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
int N = 1e8;
real dx = (upper_bound - lower_bound) / N;
double Integral = 0.0;
//申请内存
double* d_Integral;
hipMalloc(&d_Integral,sizeof(double));
// 核函数启动配置
int blockSize = 256;
int numBlocks = (N + blockSize - 1) / blockSize;
// 开始计时
my_timer timer;
timer.start();
//d_Integral是DCU中的指针,Integral是CPU中的变量
hipMemcpy(d_Integral,&Integral,sizeof(double),
hipMemcpyHostToDevice);
//lower_bound积分下限
integral_kernel<<<numBlocks, blockSize>>>
(d_Integral,lower_bound,N,dx);
hipMemcpy(&Integral,d_Integral,sizeof(double),
hipMemcpyDeviceToHost);
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(upper_bound) - F(lower_bound));
printf("Elapsed time: %8.6f ms\n",timer.dt);
hipFree(d_Integral);
return 0;
}
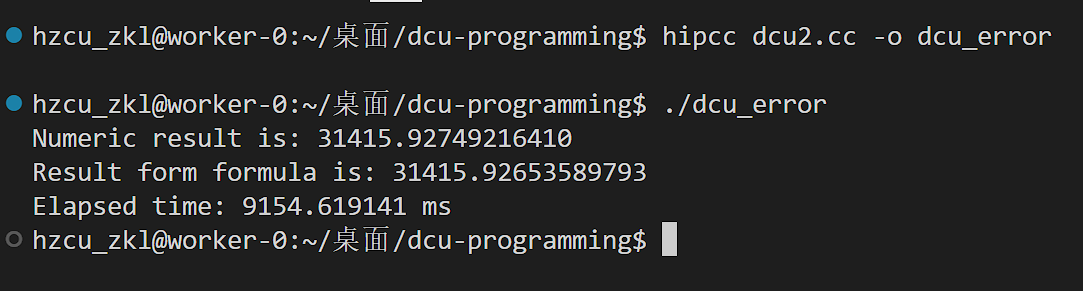
运行
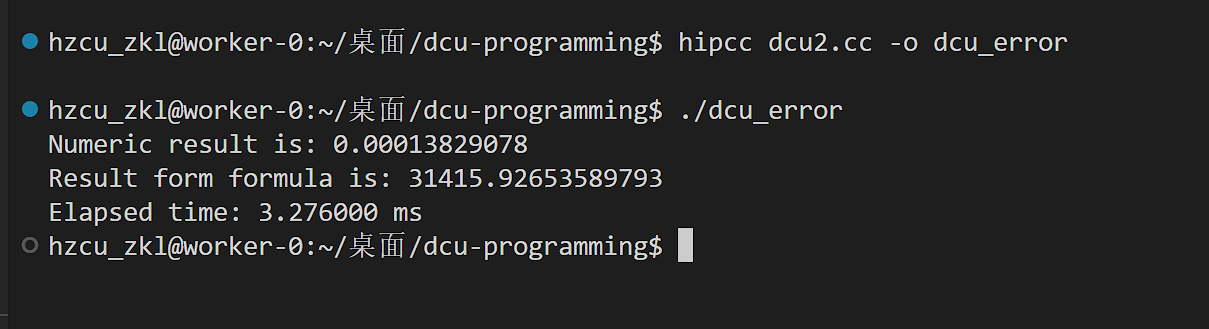
但是这个结果是错误的,因为并行规约问题
并行规约:让多个线程并行做计算,但最后需要把所有结果归并为一个值,这类问题被称为并行规约问题。
在上面的代码中,多个线程会同时从d_Integral(所保存的地址)中取值,把本线程的结果加到这个值上再存回d_Integral中。以两个线程为例,假设此时d_Integral的值还是0,线程1算出结果dF1,线程2算出结果dF2,线程1从d_Integral处取值0,0加上dF1还是dF1,此时线程1把dF1写回d_Integral;如果线程1还没完成写回,线程2就从d_Integral处取值,仍然得到0,0加dF2等于dF2,线程将dF2写回d_Integral。这种情况下如果线程1先完成写回,d_Integral最终就是dF1,如果线程2先完成写回,结果就是dF2,但无论如何不是正确的结果dF1+dF2。
感觉有点像读者-写者问题。
解决办法使用原子操作:所谓“原子”的意思是上面叙述的一个线程对d_Integral的读-加-写回这三个动作是不可分的,借用了“原子”这个词不可再分的原意。当一个线程执行这个操作时,必须得把读-加-写回这三个操作全部做完,在此期间别的线程不能执行此操作。
#include <cstdio>
#include "timer.h"
#include <cmath>
#include <hip/hip_runtime.h>
// 定义精度
#ifdef DOUBLE_PREC
typedef double real;
#define SIN(x) sin(x)
#define COS(x) cos(x)
#else
typedef float real;
#define SIN(x) sinf(x)
#define COS(x) cosf(x)
#endif
//前面都一样
// 用积分公式计算
double F(double x)
{
double F = x/4 + sin(2*x)/16 - sin(4*x)/16 -sin(6*x)/48;
return F;
}
// DCU 核函数
__global__
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
if (i < N) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
//修改*Integral += sin_2x * cos_x * dx;
atomicAdd(Integral,sin_2x * cos_x * dx);
}
}
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
//修改int N = 1e8;
int N = 1e6;
real dx = (upper_bound - lower_bound) / N;
double Integral = 0.0;
//申请内存
double* d_Integral;
hipMalloc(&d_Integral,sizeof(double));
// 核函数启动配置
int blockSize = 256;
int numBlocks = (N + blockSize - 1) / blockSize;
// 开始计时
my_timer timer;
timer.start();
//d_Integral是DCU中的指针,Integral是CPU中的变量
hipMemcpy(d_Integral,&Integral,sizeof(double),
hipMemcpyHostToDevice);
//lower_bound积分下限
integral_kernel<<<numBlocks, blockSize>>>
(d_Integral,lower_bound,N,dx);
hipMemcpy(&Integral,d_Integral,sizeof(double),
hipMemcpyDeviceToHost);
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(upper_bound) - F(lower_bound));
printf("Elapsed time: %8.6f ms\n",timer.dt);
hipFree(d_Integral);
return 0;
}
运行结果
利用共享内存优化
也就是把之前调用全局内存中的数据优化到LDS,从而提升速度。
核函数修改
__global__
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;//线程ID的变量
__shared__ double tmp_sh;//让线程初始化
if (tid == 0) tmp_sh = 0.0;//让线程ID为0的线程(tid == 0)将其初始化为0。
__syncthreads();//内置函数,作用是令线程块同步,即等待线程ID为0的线程初始化tmp_sh之后,所有线程才能继续往下执行。
if (i < N) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
atomicAdd(&tmp_sh,sin_2x * cos_x * dx);
}//所有线程向共享内存做原子加
__syncthreads();
if (tid == 0 ) atomicAdd(Integral,tmp_sh);//由线程ID为0的线程对全局内存中的d_Integral做一次原子加即可。
}
N改回1e8
#include <cstdio>
#include "timer.h"
#include <cmath>
#include <hip/hip_runtime.h>
// 定义精度
#ifdef DOUBLE_PREC
typedef double real;
#define SIN(x) sin(x)
#define COS(x) cos(x)
#else
typedef float real;
#define SIN(x) sinf(x)
#define COS(x) cosf(x)
#endif
//前面都一样
// 用积分公式计算
double F(double x)
{
double F = x/4 + sin(2*x)/16 - sin(4*x)/16 -sin(6*x)/48;
return F;
}
// DCU 核函数
// __global__
// void integral_kernel(double* Integral, double lb, int N, real dx)
// {
// int i = blockIdx.x * blockDim.x + threadIdx.x;
// int tid = threadIdx.x;
// if (i < N) {
// real x = lb + (i + 0.5) * dx;
// real sin_2x = SIN(2 * x);
// sin_2x *= sin_2x;
// real cos_x = COS(x);
// cos_x *= cos_x;
// //修改*Integral += sin_2x * cos_x * dx;
// atomicAdd(Integral,sin_2x * cos_x * dx);
// }
// }
__global__
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;//线程ID的变量
__shared__ double tmp_sh;//让线程初始化
if (tid == 0) tmp_sh = 0.0;//让线程ID为0的线程(tid == 0)将其初始化为0。
__syncthreads();//内置函数,作用是令线程块同步,即等待线程ID为0的线程初始化tmp_sh之后,所有线程才能继续往下执行。
if (i < N) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
atomicAdd(&tmp_sh,sin_2x * cos_x * dx);
}//所有线程向共享内存做原子加
__syncthreads();
if (tid == 0 ) atomicAdd(Integral,tmp_sh);//由线程ID为0的线程对全局内存中的d_Integral做一次原子加即可。
}
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
int N = 1e8;
//int N = 1e6;
real dx = (upper_bound - lower_bound) / N;
double Integral = 0.0;
//申请内存
double* d_Integral;
hipMalloc(&d_Integral,sizeof(double));
// 核函数启动配置
int blockSize = 256;
int numBlocks = (N + blockSize - 1) / blockSize;
// 开始计时
my_timer timer;
timer.start();
//d_Integral是DCU中的指针,Integral是CPU中的变量
hipMemcpy(d_Integral,&Integral,sizeof(double),
hipMemcpyHostToDevice);
//lower_bound积分下限
integral_kernel<<<numBlocks, blockSize>>>
(d_Integral,lower_bound,N,dx);
hipMemcpy(&Integral,d_Integral,sizeof(double),
hipMemcpyDeviceToHost);
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(upper_bound) - F(lower_bound));
printf("Elapsed time: %8.6f ms\n",timer.dt);
hipFree(d_Integral);
return 0;
}
运行后发现优化了很多
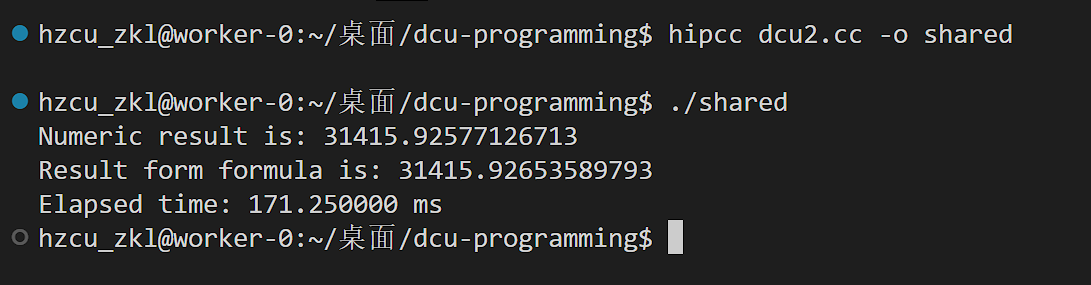
为什么tmp_sh是共享内存?
使用了 __shared__ 关键字。共享内存是一种特殊类型的存储器,可以在同一个线程块(block)内的所有线程之间共享。
现在是每个线程块会有一次原子加,继续优化的话要减少线程块个数。
一个自然的想法是增加线程块的大小。将blockSize修改为1024。但是结果却反而耗时更长。
为什么?
将 blockSize 增加到 1024 后反而使得程序运行时间变长,这可能是由于以下几个原因:
- 资源竞争:每个 CUDA 核函数执行需要使用一定数量的硬件资源,如寄存器和共享内存。增加线程块的大小会增加每个线程块对这些资源的需求。如果超出了设备的资源限制,会导致无法同时调度足够多的线程块,从而降低并行度和性能。
- 共享内存冲突:虽然共享内存访问比全局内存访问快,但增加线程块的大小会增加共享内存的使用频率,可能导致银行冲突(bank conflicts)。共享内存是分成多个银行的,如果多个线程访问同一个银行中的数据,就会导致访问冲突,从而增加延迟。
- 线程调度开销:每个多处理器(Streaming Multiprocessor, SM)上可以并行执行的线程块数目是有限的,取决于线程块的大小和使用的资源量。增大线程块大小可能会减少能够同时调度的线程块数,从而减少并行度和效率。
- 内存带宽瓶颈:即使共享内存的使用优化了某些方面的性能,但总体计算仍需大量访问全局内存。增大线程块大小可能导致更多的线程同时访问全局内存,增加了内存带宽压力,反而会使得内存访问变慢。
感觉大概率是银行冲突。
是否有办法优化对共享内存的原子加呢?
一种方法是线程束洗牌函数(warp shuffle)的内置函数来实现。它们的作用是让线程获取到线程束内其他线程的局部变量的值,从硬件层面讲仍然是利用共享内存实现的。
核函数修改(感觉像是减少LDS读取)
__global__ __launch_bounds__(1024)
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
double tmp = 0.0;
__shared__ double tmp_sh;
if (tid == 0) tmp_sh = 0.0;
__syncthreads();
if (i < N) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
tmp += sin_2x * cos_x * dx;
int delta = 1;
for (int j = 0; j < 6; j++) {
tmp += __shfl_down(tmp,delta,64);
delta += delta;
}
if (tid%64==0) atomicAdd(&tmp_sh,tmp);
__syncthreads();
if (tid == 0 ) atomicAdd(Integral,tmp_sh);
}
}
使用了__shfl_down这个函数,它的作用是使一个线程束内,线程ID为id的线程,获取到线程ID为(id+delta)的线程的局部变量tmp的值,64是一个线程束中线程的个数,对于线程id+delta超过64的线程,还是得到自己的tmp值。
举例来说,当delta=1时,对于线程0,这个函数返回线程1的tmp;对于线程2,这个函数返回线程3的tmp;对于线程63,这个函数则返回自己的tmp。当delta=2时,对于线程0,此时它的tmp已是进行洗牌前的线程0和线程1的tmp之和,再用__shfl_down把线程2的tmp(洗牌前的线程2和线程3的tmp之和)传给它,加在一起就是洗牌前线程0-3的tmp之和。当delta=4时,会把线程4的tmp(洗牌前线程4-7的tmp之和)传给线程0,加在一起是洗牌前线程0-7的tmp之和。
以此类推,随着j不断循环,delta=8时,线程0的tmp为洗牌前线程0-15的tmp之和,delta=16时,是线程0-31的tmp之和,delta=32时,是线程0-63的tmp之和。
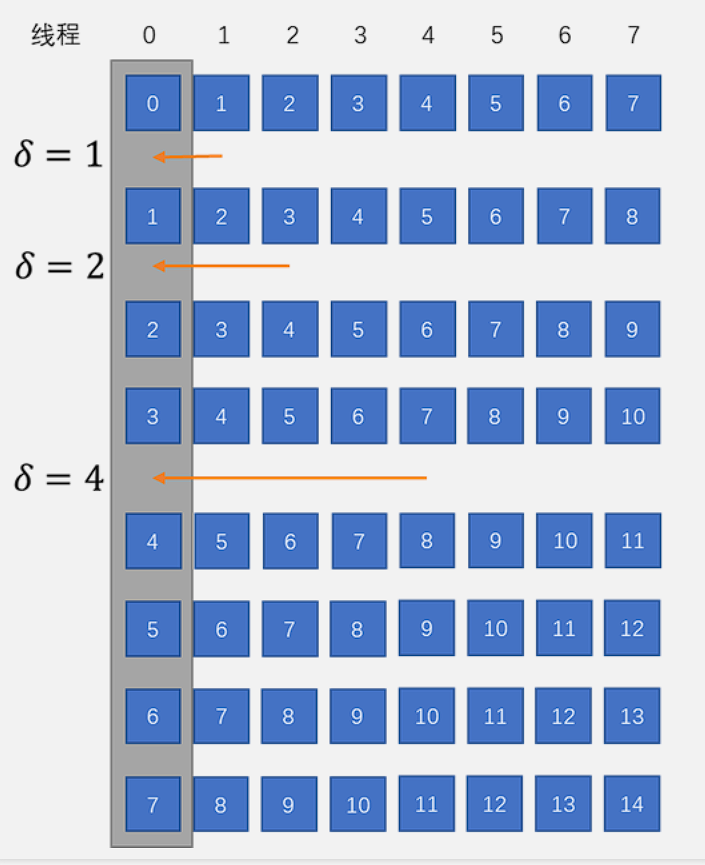
通过调用6次__shfl_down,线程束内的线程0的tmp为所有线程的tmp之和,然后再由每个线程束中的线程0(tid模64为0)将tmp值原子加到共享内存tmp_sh中,这样就把每个线程束中64个线程一起对tmp_sh做原子加改成了6次__shfl_down之后由一个线程对tmp_sh做原子加。
假设初始时每个线程的tmp值如下:
- 线程0:
tmp[0] - 线程1:
tmp[1] - 线程2:
tmp[2] - 线程3:
tmp[3] - 线程4:
tmp[4] - 线程5:
tmp[5] - …
在第一次循环 (delta = 1) 后,每个线程的tmp值变为:
- 线程0:
tmp[0] + tmp[1] - 线程1:
tmp[1] + tmp[2] - 线程2:
tmp[2] + tmp[3] - 线程3:
tmp[3] + tmp[4] - 线程4:
tmp[4] + tmp[5] - …
在第二次循环 (delta = 2) 后,每个线程的tmp值变为:
- 线程0:
tmp[0] + tmp[1] + tmp[2] + tmp[3] - 线程1:
tmp[1] + tmp[2] + tmp[3] + tmp[4] - 线程2:
tmp[2] + tmp[3] + tmp[4] + tmp[5] - 线程3:
tmp[3] + tmp[4] + tmp[5] + tmp[6] - 线程4:
tmp[4] + tmp[5] + tmp[6] + tmp[7] - …
是否还有其他办法优化对共享内存的原子加呢
使用分块原子加
使用warp shuffle函数
使用分层原子加
使用分布式原子加
进一步优化
可以进一步减少线程数量,虽然减少没有足够线程执行N次核函数,但是可以多跑几次。
核函数
__global__ __launch_bounds__(1024)
void integral_kernel(double* Integral, double lb, int N, real dx)
{
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
int tid = threadIdx.x;
double tmp = 0.0;
__shared__ double tmp_sh;
if (tid == 0) tmp_sh = 0.0;
__syncthreads();
for (int i = index; i < N; i += stride) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
tmp += sin_2x * cos_x * dx;
}
int delta = 1;
for (int j = 0; j < 6; j++) {
tmp += __shfl_down(tmp,delta,64);
delta += delta;
}
if (tid%64==0) atomicAdd(&tmp_sh,tmp);
__syncthreads();
if (tid == 0 ) atomicAdd(Integral,tmp_sh);
}
核函数中,CPU版本的for循环又回来了,但这次循环计数i并不是从0开始每次递增1,而是对于每个线程来说从index开始,每次递增stride,index是线程在这个核函数启动的所有线程中的索引,stride是这个核函数启动的总线程数。当核函数启动的总线程数少于循环次数N时,每个线程就从循环计数为index的循环开始,负责循环计数相差stride的所有循环,直到把N次循环全部做完。
用空间换时间
还有一种可行的思路,既然对全局内存做原子加比较慢,我们可以申请长度为线程总数的数组,这样每个线程可以把计算结果保存在不同的位置,避免多个线程对同一位置的原子加,之后再单独对这个数组中的元素求和。这是一种用空间换时间的方法,同样是一种权衡。
核函数
__global__
void integral_kernel(double* res_warp, double lb, int N,
real dx)
{
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
int tid = threadIdx.x;
double tmp = 0.0;
for (int i = index; i < N; i += stride) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
tmp += sin_2x * cos_x * dx;
}
int delta = 1;
for (int j = 0; j < 6; j++) {
tmp += __shfl_down(tmp,delta,64);
delta += delta;
}
if (tid == 0) res_warp[blockIdx.x] = tmp;
}
主函数
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
int N = 1e8;
real dx = (upper_bound - lower_bound) / N;
double Integral = 0.0;
// 核函数启动配置
int blockSize = 64;
int numBlocks = (N / 100 + blockSize - 1) / blockSize;
// 用于存储每个warp的结果
int size = numBlocks * sizeof(double);
double* res_warp = (double *) malloc(size);
double* d_res_warp;
hipMalloc(&d_res_warp,size);
// 开始计时
my_timer timer;
timer.start();
integral_kernel<<<numBlocks, blockSize>>>
(d_res_warp,lower_bound,N,dx);
hipMemcpy(res_warp,d_res_warp,size,hipMemcpyDeviceToHost);
for (int i = 0; i < numBlocks; i++) {
Integral += res_warp[i];
}
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(upper_bound) - F(lower_bound));
printf("Elapsed time: %8.6f ms\n",timer.dt);
hipFree(d_res_warp);
free(res_warp);
return 0;
}
CPU求和也可以用核函数
__global__
void sum_kernel(double* res_warp, int numBlocks,
double* Integral)
{
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
int tid = threadIdx.x;
double tmp = 0.0;
#if 1
index *= 2;
stride *= 2;
// 如果numBlocks是奇数
// 用0号线程把res_warp[numBlocks-1]单独读取
if (numBlocks%2==1) {
if (tid==0) tmp = res_warp[numBlocks-1];
numBlocks -= 1;
}
for (int i = index; i < numBlocks; i += stride) {
// 从全局内存一条指令读取128位,即两个double型
tmp += res_warp[i] + res_warp[i+1];
}
#else
for (int i = index; i < numBlocks; i += stride) {
tmp += res_warp[i];
}
#endif
int delta = 1;
for (int j = 0; j < 6; j++) {
tmp += __shfl_down(tmp,delta,64);
delta += delta;
}
if (tid == 0) *Integral = tmp;
}
在主机代码中,现在不再需要主机内存中的空间res_warp,仅在设备端为d_res_warp分配内存即可,但这次最终的积分结果d_Integral需要拷贝回主机。至于sum_kernel,我们只使用一个线程束来执行,这样在核函数的最后直接用线程0对d_Integral赋值即可。
但是我最后运行的elapsed time还是挺久的,不知道为啥
异步并发执行
主要了解流水线技术,使用代码
#include <cstdio>
#include "timer.h"
#include <cmath>
#include <hip/hip_runtime.h>
// 定义精度
#ifdef DOUBLE_PREC
typedef double real;
#define SIN(x) sin(x)
#define COS(x) cos(x)
#else
typedef float real;
#define SIN(x) sinf(x)
#define COS(x) cosf(x)
#endif
double F(double x)
{
double F = x/4 + sin(2*x)/16 - sin(4*x)/16 -sin(6*x)/48;
return F;
}
__global__
void integral_kernel(double* res_warp, double lb, int N,
real dx)
{
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
int tid = threadIdx.x;
double tmp = 0.0;
for (int i = index; i < N; i += stride) {
real x = lb + (i + 0.5) * dx;
real sin_2x = SIN(2 * x);
sin_2x *= sin_2x;
real cos_x = COS(x);
cos_x *= cos_x;
tmp += sin_2x * cos_x * dx;
}
int delta = 1;
for (int j = 0; j < 6; j++) {
tmp += __shfl_down(tmp,delta,64);
delta += delta;
}
if (tid == 0) res_warp[blockIdx.x] = tmp;
}
int main()
{
double lower_bound = 0.0;
double upper_bound = 40000 * acos(-1); //acos(-1) = pi
double range = upper_bound - lower_bound;
int N = 1e8;
real dx = range / N;
int numIntervals = 8;
double Integral = 0.0;
// 核函数启动配置
int blockSize = 64;
int numBlocks = (N + blockSize - 1) / blockSize;
// 用于存储每个warp的结果
int size = numBlocks * sizeof(double);
double* res_warp = (double *) malloc(size);
double* d_res_warp;
hipMalloc(&d_res_warp,size);
// 开始计时
my_timer timer;
timer.start();
for (int j = 0; j < numIntervals; j++) {
integral_kernel<<<numBlocks, blockSize>>>
(d_res_warp,lower_bound,N,dx);
hipMemcpy(res_warp,d_res_warp,size,
hipMemcpyDeviceToHost);
for (int i = 0; i < numBlocks; i++) {
Integral += res_warp[i];
}
lower_bound += range;
}
timer.stop();
printf("Numeric result is: %.11f\n", Integral);
printf("Result form formula is: %.11f\n",
F(range*numIntervals) - F(0));
printf("Elapsed time: %8.6f ms\n",timer.dt);
hipFree(d_res_warp);
free(res_warp);
return 0;
}
使用性能分析工具
打开chrome://tracing分析json文件
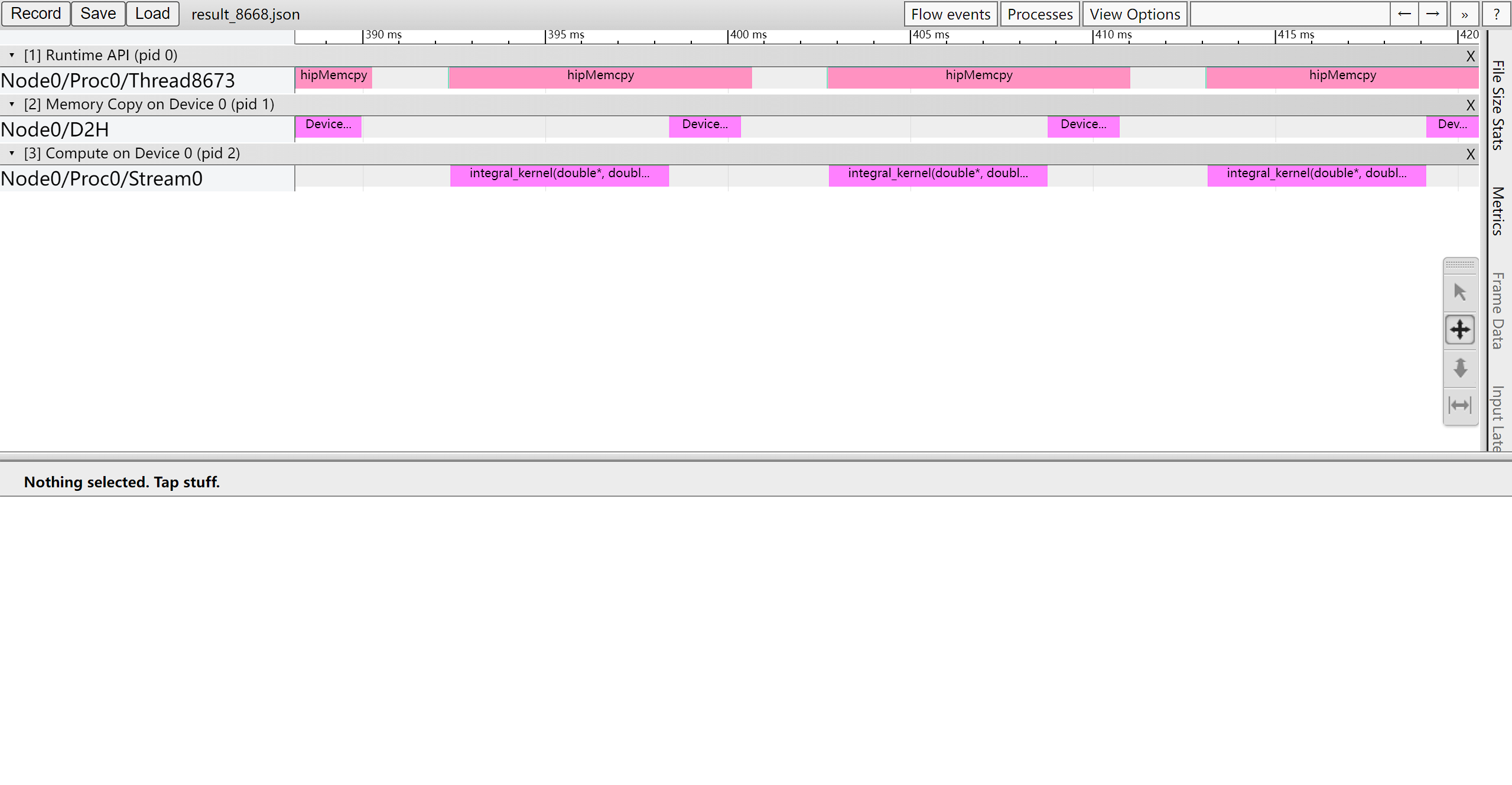
第一行是主机API,第二行是拷贝,第三行则是核函数。
可以看到执行integral核函数,device到主机host,hipMemcpy完成。但是中间有一段时间空着。
DCU等待这段时间是没有必要的,它可以立刻继续执行核函数integral_kernel,这只会改变设备上d_res_warp的内容而不会改变主机上res_warp的内容;在DCU执行核函数的同时主机来做对Integral的累加,完成后再将DCU新计算的d_res_warp的结果拷贝过来,这样才更有效率。
当前的代码无法实现这种想法,因为主机是串行执行,只有在当前循环的累加执行完毕后,才能做下一次循环中的核函数调用。为此,一种思路是使用主机的多线程并行,一个线程负责累加,另一个线程调用核函数。但其实使用一个主机也可以完成,修改主机代码
timer.start();
// 对第一个区间计算并拷贝后,不立刻在主机端求和
// 而是先启动下一个区间计算的核函数
integral_kernel<<<numBlocks, blockSize>>>
(d_res_warp,lower_bound,N,dx);
hipMemcpy(res_warp,d_res_warp,size,
hipMemcpyDeviceToHost);
lower_bound += range;
for (int j = 1; j < numIntervals; j++) {
// 启动核函数计算当前区间
integral_kernel<<<numBlocks, blockSize>>>
(d_res_warp,lower_bound,N,dx);
// 主机端同时对上一个区间求和
for (int i = 0; i < numBlocks; i++) {
Integral += res_warp[i];
}
// 求和完毕后,拷贝当前区间的结果
hipMemcpy(res_warp,d_res_warp,size,
hipMemcpyDeviceToHost);
lower_bound += range;
}
// 最后一个区间的求和
for (int i = 0; i < numBlocks; i++) {
Integral += res_warp[i];
}
timer.stop();
这样修改后就有重叠时间了,在空白等待时候也可以计算
进一步优化的想法理所应当是让相邻区间的计算时间有更多的重叠,可以让多个核函数一部执行。
在DCU编程中,可以创建被称为“流(stream)”的设备端队列,并将拷贝以及核函数发布在流上。同一个流上的任务是按入列的顺序串行执行的,不同流上的任务则是异步并发的,当然如果一个流的任务已占据了所需的软硬件资源,另一个流的任务则需要等待。
如何将拷贝和核函数发布在指定流上。此前我们使用的拷贝API是hipMemcpy,它有一个异步版本hipMemcpyAsync,相比同步版本多一个流参数。对于核函数,在前面的例子中三个尖括号“<<<>>>”中的核函数启动配置仅包含线程网格和线程块的配置,但启动配置还包括动态共享内存的大小以及流,分别是三个尖括号中的第三和第四个参数。
使用双缓冲方法为每个区间分配不同d_res_wrap
定义缓冲结构体Buffer
struct Buffer
{
double* res_warp;
double* d_res_warp;
hipStream_t stream;
void alloc(int size) {
hipHostMalloc(&res_warp,size);
hipMalloc(&d_res_warp,size);
hipStreamCreate(&stream);
}
void dealloc() {
hipHostFree(res_warp);
hipFree(d_res_warp);
hipStreamDestroy(stream);
}
};
将res_warp和d_res_warp都包含在Buffer中,此外还有流变量stream。在Buffer中还有两个成员函数alloc和dealloc,用于申请/释放空间以及创建/销毁流。对于使用hipMalloc和hipFree申请和释放设备内存无需多言;对于主机内存,这里使用了hipHostMalloc和hipHostFree,而非之前的malloc和free,原因是对于涉及主机端内存的拷贝,如果想要异步,则主机端内存必须是页锁定的(page-locked),否则即使使用异步版本的拷贝hipMemcpyAsync,拷贝仍然是同步的。目前用到的hipHostMalloc和hipHostFree是专门用来申请与释放页锁定主机内存的API。剩下的hipStreamCreate和hipStreamDestory两个API则是关于流的,分别用于创建与销毁。
修改之后就是多个流

主机-设备间拷贝与页锁定内存
在流中可以插入事件:
- 处理两个流之间的依赖问题
- 计时
核函数并发执行
矩阵乘法
好像和前面差不多
使用DTK库计算—>编写核函数->LDS优化->使用更多矩阵元
共享内存的bank冲突