文章目录
- B树的概念及其特点
- 解析B树的基本操作
- 插入数据
- 插入数据模拟
- 分析分裂如何维护平衡性
- 分析B树的性能
- B+树和B*树
- B+树
- B+树的分裂
- B+树的优势
- B*
- B*树的分裂
- 总结
B树的概念及其特点
B树是一颗多叉的平衡搜索树,广泛应用于数据库和 文件系统中,以保持数据有序并允许高效的插入、删除和查找操作。下面介绍B树的特点:
- 多路平衡树:多路平衡树其实就是多叉平衡树,每个节点都有多个指向孩子节点的指针以及键值。通常,一颗m阶的B树有k个子节点,有k-1个关键字,而k的取值范围为[ceil(m/2),m](celi表示向上取整)。例如一颗3阶的B树,最多有3个孩子2个关键字。
- 键值有序:每个节点中包含多个关键字,这些关键字是有序的。节点中每个关键字都将子节点切割成两部分,左边部分的节点的所有关键字的值一定是小于该关键字的,右边节点的所有关键字的值都是大于该关键字的,这一点跟二叉搜索树的性质相同。
- 树的高度平衡:所有叶子节点的深度都是一样的,站在AVL树的角度讲,每个节点的平衡因子都是0。具体如何维护这个平衡性下面会详细介绍。
- 高效的磁盘读写:B树被设计用于在磁盘上高效的存储和读取数据。通过每个节点都有多个键值和多个字节的指针,从而减少磁盘的读写次数。
下面给出一个3阶B树的节点示意图:

在设计B树节点时,孩子数量通常要多一个,这是为了方便后续实现插入操作和删除操作。概念上我们依旧认为m阶B树的节点的孩子个数为k个,实现的时候认为是k+1个。
我们将一个节点的所有键值集合称为数据域
解析B树的基本操作
插入数据
为了保证插入节点之后B树保持其平衡性,我们采用分裂节点来保持树的结构。具体的插入步骤如下:
- 查找插入位置:首先从根节点开始,找到应该插入新键值的叶子节点。(B树每一次插入新键值都一定在叶子节点处)
- 插入键值:在找到的叶子节点处插入新键值。如果该叶子节点的键值已经满了,即关键字的个数等于m+1,则需要对该叶子节点进行分裂。分裂的操作步骤如下:
- 找到节点数据域的中间位置
- 给一个新节点,将中间位置右边的所有数据(包括键值和孩子指针)搬到新节点中。新节点是被分裂节点的兄弟节点。
- 将中间位置的键值移动放到父亲节点中,如果没有父节点,那就再创建一个父节点,并连接。
插入数据模拟
现在假设我们有一颗阶数为3的B树(每个节点最多有3个孩子和2个键值),并按以下顺序插入键值:10, 20, 5, 6, 12, 30, 7, 17。
- 当插入了10、20之后:
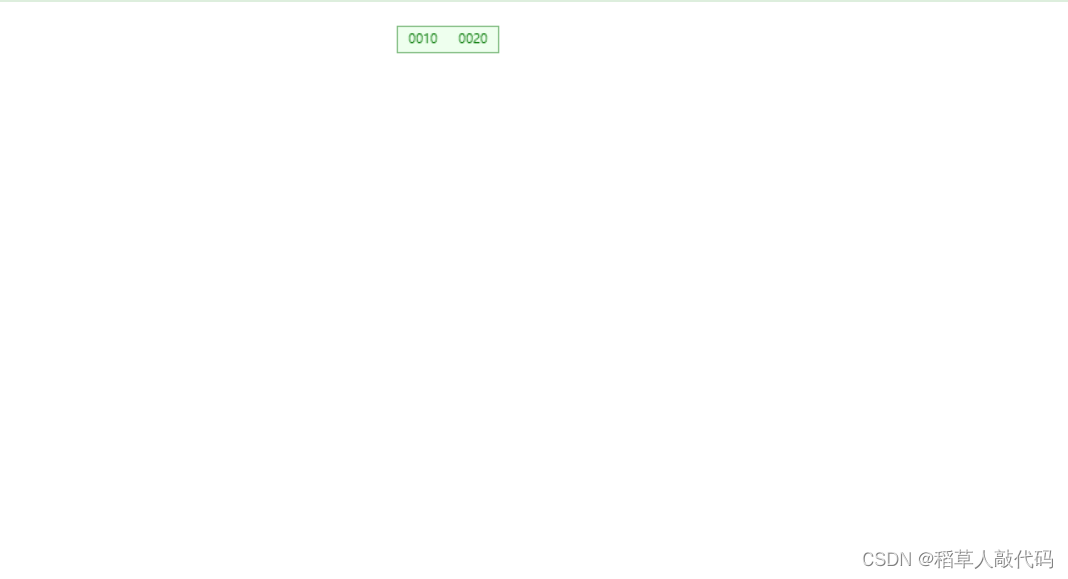
只有一个节点,该节点已经有两个键值分别是10、20,现在这个节点的键值已经满了。 - 插入5,节点键值溢出需要分裂:
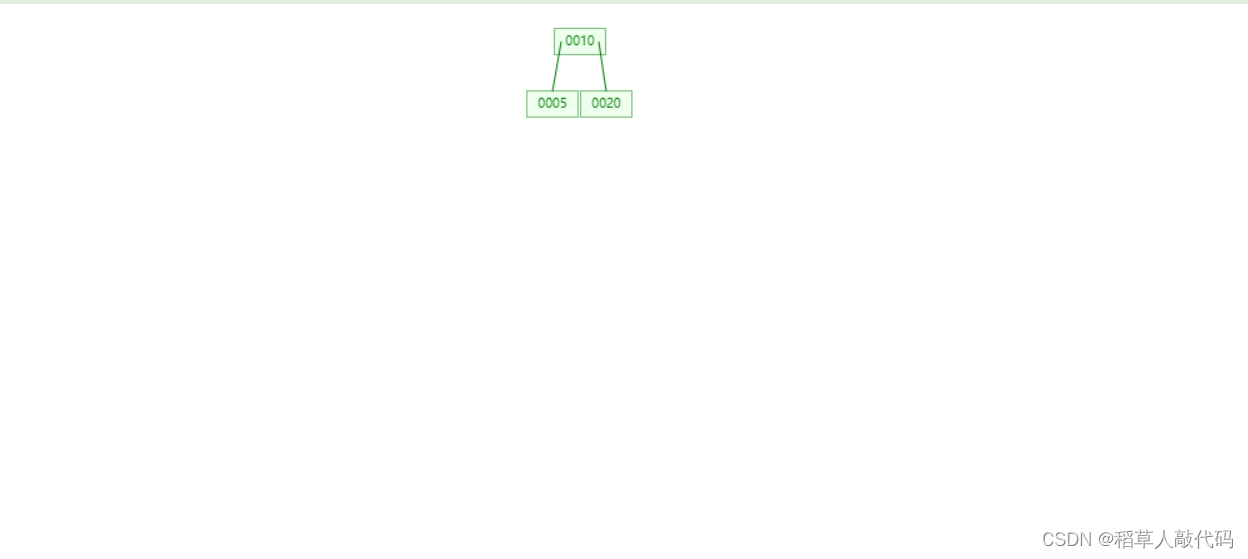
仔细观察上述结果,根据插入数据的步骤,插入节点的键值满了,需要分裂。找到数据域的中间位置,也就是10的位置,10右边的数据全部移动到新兄弟节点中,再把中间键值10提取出来插入到父亲节点中。由于没有父节点,则新创建一个父节点。
点击观看分裂演示过程
点击观看整个插入过程
分析分裂如何维护平衡性
为什么分裂操作会保证B-树维持特性呢?以下是具体分析:
- 保证叶子节点在同一深度:分裂只是在满节点的基础上进行的,将中间键提升到父节点并不会改变叶子节点的深度差,如果父节点满了,那父节点再分裂。如果父节点不存在,那么就会创建一个新父节点,此时这个新父节点一定成为了B树的根节点,也就意味着每条叶子节点分支的高度都会+1。
- 控制节点的键值数量:每次分裂出去的键值数量都是大约一半,新的兄弟节点拥有的键值数量和被分裂节点的键值数量几乎一致。这样就保证了B树每个节点的键值数目在[ceil(m/2)−1,m−1]之间。
- 分裂后有序:由于中间键值的选择,新的兄弟节点的所有键值一定都大于被分裂节点剩下的键值。再将中间键值插入到父节点中,中间键的左孩子指向被分裂节点,右孩子指向新兄弟节点,这样一来,整颗树还是一颗搜索树。
分析B树的性能
设n为B树的总键值数量,m为B树的阶数。则每个节点最多有m个孩子节点,m-1个关键字。
-
查找效率:查找操作在B树中的时间复杂度为O(log n),原因如下:
- B树的高度h和节点的最小度数t以及总键值数n的关系为:h=logt(n),因为每个节点至少有t个子节点。
- 在每个节点中查找特定键值的时间复杂度为O(t),但由于t是一个常数,所以总时间复杂度就是O(1)。(t是B树的最小度数ceil(m/2),是确定的)
- 查找的总时间效率就是树的高度乘每个节点查找特定键值的时间,也就是O(log n)
-
插入操作:插入操作的时间复杂度也是O(log n),具体分析如下
- 查找到插入位置的时间复杂度为O(logn)
- 插入后可能需要分裂节点,分裂操作的时间复杂度为O(t),这是因为每个节点最多包含t个键值。
- 由于树的高度较小且分裂操作是局部的,整体插入操作的时间复杂度仍为O(log n)。
-
删除操作:删除操作的时间复杂度也是O(log n),具体分析:
- 查找到目标节点的时间复杂度为O(log n)
- 删除操作可能涉及节点的合并或键值的重新分配,这些操作的时间复杂度都是O(t),同样由于t是常数,总体的时间复杂度还是O(log n)
综上,B树各种操作时间效率都是logn。下面分析B树的空间复杂度:
B树的空间复杂度主要受到节点数目的影响。每个节点包含k-1个键值和k+1个子节点指针,节点总数与树的高度和阶数有关。由于B树是多路平衡树,其空间复杂度可以表示为O(n),其中n是键值总数。
B+树和B*树
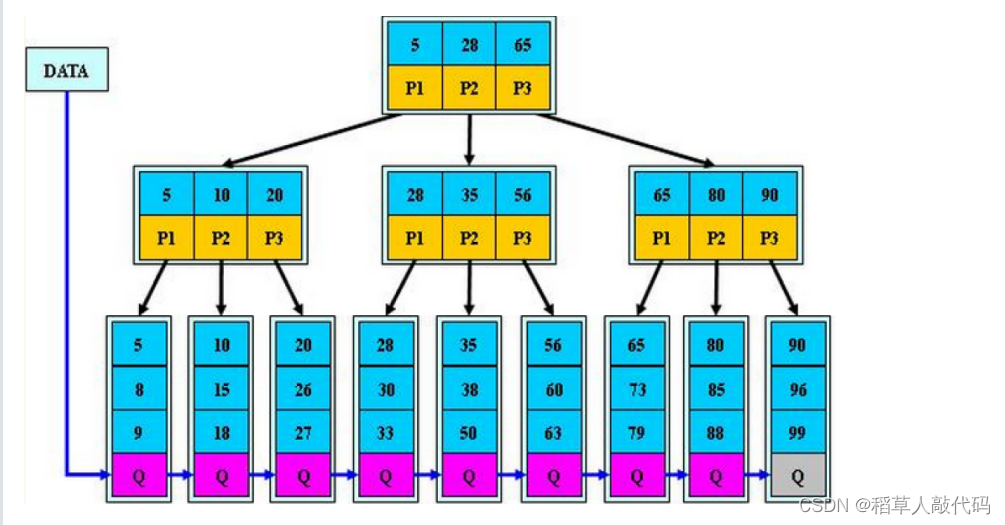
B+树
B+树是B树的变形,在B树的基础上优化的多路平衡树,B+树的规则和B树类似,但在B树的基础上做了以下几点改进优化:
- 分支节点的子节点指针数量和关键字的个数相同(或者是子节点数量比关键字个数多1)
- 分支节点不存储实际的数据,只用于引导查找路径(存储的是孩子节点的最小关键字)
- 所有的实际数据都存在叶子节点中
- 叶子节点按照键值排序,彼此之间用一个指针连接,形成一个链表
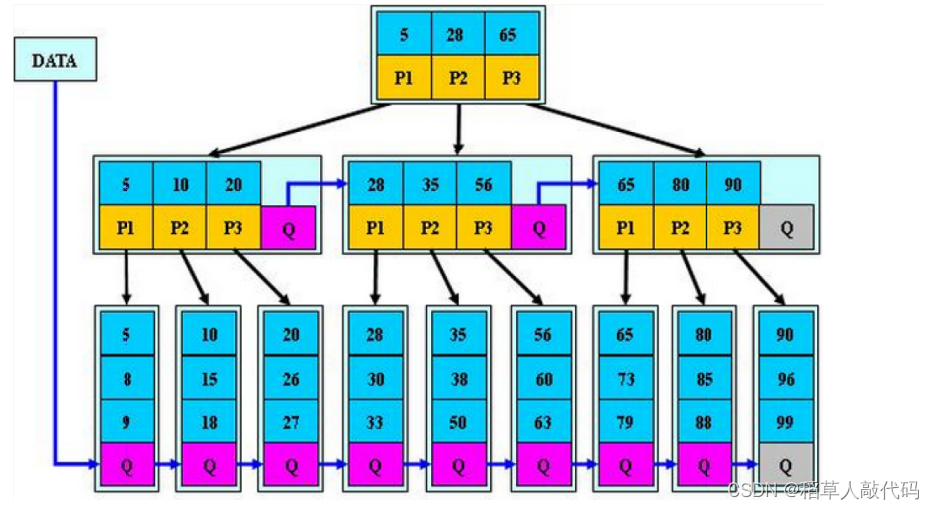
下面给出一颗B+树结构示意图:
在B+树中如何查找一个数据呢?步骤如下:
和B树一致,从根节点开始逐层向下查找,比较当前键值和目标键值,如果大于目标键值,说明当前键值的孩子分支的所有值都大于目标键值。所以我们需要找到一个第一个大于目标键值的前一个键值种去寻找。点击演示B+树插入数据的动画。
B+树的分裂
当一个结点满时,分配一个新的结点,并将原结点中1/2的数据复制到新结点,最后在父结点中增加新结点的指针;B+树的分裂只影响原结点和父结点,而不会影响兄弟结点,所以它不需要指向兄弟的指针。
时间复杂度和空间复杂度和B数一样。
B+树的优势
- 范围查询非常高效,因为叶子节点通过链表连接,可以顺序访问所有满足范围条件的节点。范围查询性能优于B树。
- 插入和删除操作相对简单一些,因为数据只存储在叶子节点中,只需在叶子节点中维护平衡
- B+树适用于高效访问和顺序访问的场景
B*
B*树是B+树的变形,在B+树的非根和非叶子节点再增加指向兄弟节点的指针。具体结构如下:
B*树的分裂
当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字(因为兄弟结点的关键字范围改变了);如果兄弟也满了,则在原结点与兄弟结点之间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针。所以,B*树分配新结点的概率比B+树要低,空间使用率更高;
总结
- B树:有序数组+平衡多叉树
- B+树:有序数组链表+平衡多叉树
- B*树:一棵更丰满的,空间利用率更高的B+树