目录
一、中断系统
1、中断的原理
2、中断类型
外部中断
定时器中断
DMA中断
3、中断处理函数
中断标志位清除
中断服务程序退出
二、实际应用
中断控制LED
任务要求
代码示例
中断控制串口通信
任务要求1
代码示例
任务要求2
代码示例
总结
学习目标:
学习stm32中断原理和开发编程方法,实现中断点亮LED灯;中断发送消息。
一、中断系统
STM32微控制器的中断系统是其功能强大和灵活性的重要组成部分。中断允许微控制器在执行主程序的同时,及时响应外部事件或内部条件的变化,从而实现高效的实时控制和数据处理。核心的中断控制器是NVIC(Nested Vectored Interrupt Controller),负责管理和分发所有的中断请求,并支持优先级分组,使开发人员能够为不同的中断源设置不同的优先级。STM32支持多种类型的中断,包括外部中断、定时器中断、串口中断和DMA中断。每种中断类型都有特定的配置方式和中断服务程序编写规范,以确保及时和有效地处理相应的事件。中断使能和中断优先级设置是配置中断系统的关键步骤,同时需要编写高效的中断服务程序,以便快速响应并尽快恢复主程序的执行。这些特性使得STM32在广泛的嵌入式应用中表现出色,为实时控制和数据处理提供了强大支持。
1、中断的原理
下面通过一个生活中的例子,帮助更好的去理解中断:
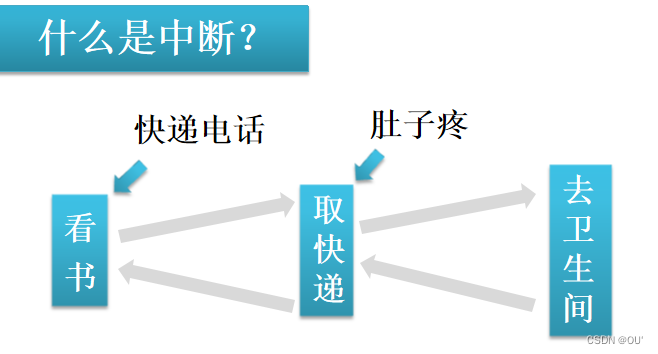
可以看到图中,由最开始的看书,转到最后的去卫生间,这个过程中,看书就受到了中断。我们将看书看作主程序,快递电话、肚子疼视为中断源,取快递和去卫生间视为中断服务程序 ,但是通过箭头可以看到,最后还是返回到了看书的 “主程序” ,所以,中断还存在返回,我们叫做中断返回。
在计算机中,执行程序过程中,当出现异常情况(断电等)或特殊请求(数据传输等)时,计算机暂停现行程序的运行,转向对这些异常情况或特殊请求进行处理,处理完毕后再返回到现行程序的中断处,继续执行原程序,这就是“中断”。
中断的主要处理流程为:中断请求——>中断响应——>中断服务——>中断返回
中断请求:中断请求是中断源向CPU发出中断请求信号,此时中断控制系统的中断请求寄存器被置位,向CPU请求中断
中断响应:CPU的中断系统判断中断源的中断请求是否符合中断响应条件,如果符合条件,则暂时中断当前程序并控制程序跳转到中断服务程序
中断服务:为处理中断而编写的程序称为中断服务程序,是由开发人员针对具体中断所要实现的功能进行设计和编写的,需要由开发人员来实现
中断返回:CPU退出中断服务程序,返回到中断请求响应之前被中止的位置继续执行主程序。这部分操作同样由硬件来实现,不需要开发人员进行处理

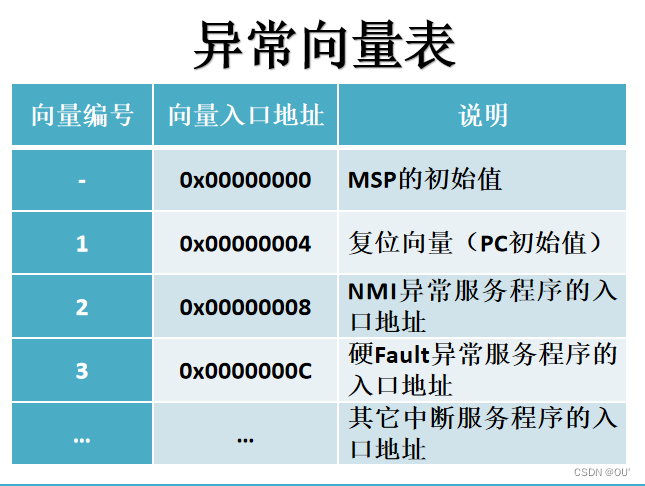
当发生了异常或中断,内核要想响应这些异常或中断,就需要知道这些异常或中断的服务程序的入口地址,再由入口地址找到相应的中断服务程序,由中断入口地址组成的表称作中断向量表(如下图)。
STM32中断系统的结构和工作原理如下:
中断请求来源:STM32的中断请求可以来自外部和内部两个方面。外部中断是由GPIO口引脚的电平或边沿信号变化触发,而内部中断通常是由硬件模块(如定时器、ADC)或软件产生的。
NVIC控制器:在STM32中,所有中断请求都由NVIC(Nested Vectored Interrupt Controller)控制器进行管理和调度。NVIC是一个基于向量表的中断控制器,通过优先级和向量表来实现对中断请求的管理。
中断分组:STM32将中断分为多个组别,每个组别包含一组中断请求。不同组别的中断请求可以具有不同的优先级,并且可以使用优先级抢占和屏蔽机制来确保系统的实时性和可靠性。STM32中断分组方式可选为0~4个前缀,用于设定中断优先级组和亚组。
中断服务程序:当中断事件发生后,CPU会暂停当前任务并跳转到相应的中断服务程序,处理该事件。中断服务程序通常包括以下几个步骤:保存CPU寄存器的值(包括堆栈指针、程序计数器等)处理中断请求(根据外部或内部中断的类型进行相应的处理,如清除标志位、读取数据等操作)执行用户自定义代码(根据实际需求执行用户自定义的代码段)恢复CPU寄存器的值(将保存在堆栈中的寄存器值恢复到其原始状态,以便CPU继续执行之前的任务)
中断优先级:STM32中,所有中断请求都具有唯一的编号(IRQn),并且可以根据编号和中断分组方式确定其优先级。优先级高的中断可以打断正在执行的低优先级中断,从而确保系统的实时性和可靠性。如果多个中断请求的优先级相同,则可以使用优先级抢占机制来确定响应顺序

2、中断类型
外部中断
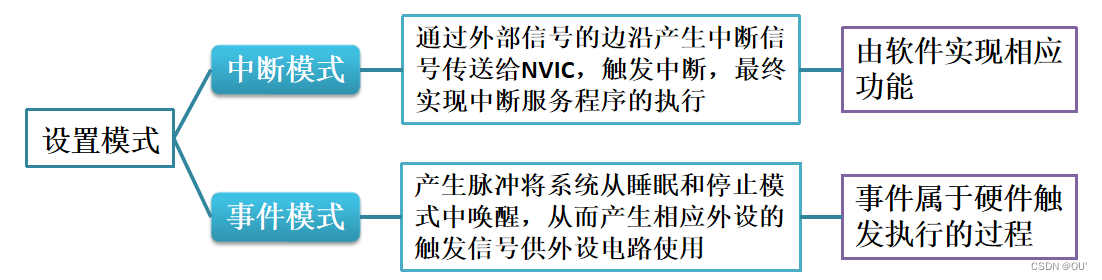
EXTI(外部中断/事件控制器)支持19个外部中断/事件请求,每个中断/事件都有独立的触发和屏蔽设置,具有中断模式和事件模式两种设置模式。
其是一种通过配置GPIO引脚并使用EXTI线路实现的事件处理机制。在初始化GPIO引脚为输入并设置相应的中断触发方式后,可以通过编写中断服务程序来响应外部事件。例如,配置GPIO引脚为上升沿触发,当引脚接收到上升沿信号时,会触发预先定义的中断服务程序,以便快速处理事件。这种机制使得STM32能够高效地监听和响应外部触发事件,广泛应用于各种应用场景中。

- 输入线:EXTI有19个中断/事件输入线,这些输入线可以通过寄存器设置为任意一个GPIO,也可以是一些外设事件。
- 边沿检测电路:它会根据上升沿触发选择寄存器(EXTI_RTSR)和下降沿出发选择器(EXTI_FTSR)对应的设置来控制信号触发。
上升沿触发选择寄存器:要配置STM32微控制器的外部中断以在上升沿触发时响应,首先需通过GPIO的配置寄存器(如GPIOxCRH或GPIOxCRL)将相应引脚设置为输入模式。接着,在EXTIx_RTSR寄存器中设置相应的位来使能对应的外部中断线x的上升沿触发。最后,在NVIC中使能对应外部中断的中断处理。这些步骤确保了当引脚接收到上升沿信号时,系统能够及时调用预定义的中断服务程序来处理事件。
下降沿触发选择寄存器:要配置STM32微控制器的外部中断以在下降沿触发时响应,首先需通过GPIO的配置寄存器(如GPIOx_CRH或GPIOx_CRL)将相应引脚设置为输入模式。接着,在EXTIx_FTSR寄存器中设置相应的位来使能对应的外部中断线x的下降沿触发。最后,在NVIC中使能对应外部中断的中断处理。这些步骤确保了当引脚接收到下降沿信号时,系统能够及时调用预定义的中断服务程序来处理事件。
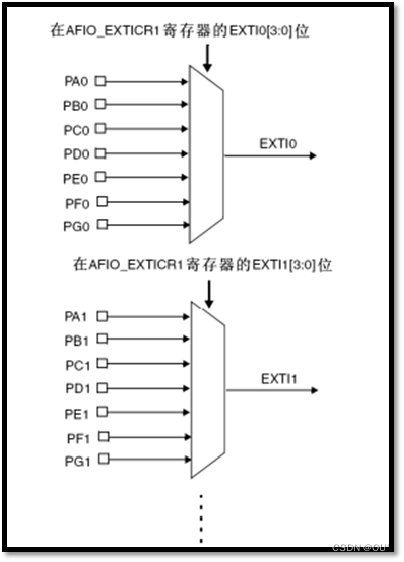
GPIO的中断是以组为单位的,同组的外部中断公用一条外部中断线。
例如:PA0、PB0、PC0、PD0、PE0、PF0、PG0这些为一组,如果使用PA0作为外部中断源,那么PB0、PC0、PD0、PE0、PF0、PG0就不能同时再作为外部中断使用了,在此情况下,只能使用类似于PB1、PC2这种末端序号不同的外部中断源。
GPIO引脚和外部中断线的映射关系图如下:
定时器中断
STM32微控制器的定时器是关键的外设,用于生成精确的时间延迟和周期性任务。通过选择合适的定时器类型(如通用定时器TIM或基本定时器TIM6/TIM7),配置工作模式和中断触发条件,可以实现定时器中断功能。配置过程包括设置时钟源、计数器初值和自动重装载寄存器,以及使能中断并编写相应的中断服务程序。这些步骤确保了定时器可以在达到预设计数值时产生中断请求,从而实现精确的时间控制和周期性任务执行,适用于实时操作系统、通信协议和其他时间敏感应用。
要配置STM32微控制器的定时器中断,首先选择适合需求的定时器(如TIM1、TIM2等),配置其工作模式、时钟源和计数周期。通过使能定时器中断控制寄存器中的更新中断位(UIE),允许定时器溢出时产生中断请求。
- 时钟和预分频设置:选择适当的时钟源和预分频器,以确定定时器的计数频率。
- 计数器设置:设置定时器的计数器初值和自动重装载寄存器(ARR),确定定时器的计数周期。
- 中断使能:通过使能定时器中断使能寄存器中的相应中断使能位(如UIE),允许定时器溢出时产生中断请求。
然后编写中断服务程序来处理定时器中断事件,包括清除中断标志、执行特定的定时任务并重新配置定时器。最后,确保在主程序中使能全局中断,以确保定时器中断能够正常触发和处理。这些步骤能够有效配置和利用STM32定时器中断功能,用于实现各种时间相关的应用和功能需求。
DMA中断
在STM32微控制器中,DMA(直接存储器访问)提供了高效的数据传输机制,允许外设和内存之间直接交换数据,无需CPU的干预,从而提升系统效率和响应速度。DMA传输完成时可触发中断通知CPU,通过使能DMA中断并配置中断服务程序,可以实现在数据传输完成时执行额外操作或启动后续任务,适用于实时数据处理、高速数据采集和图形显示等应用场景,有效优化系统性能和数据处理效率。
3、中断处理函数

中断标志位清除
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) != RESET)
{
EXTI_ClearITPendingBit(EXTI_Line0);
// 接中断服务程序代码
}
}中断服务程序退出
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) != RESET)
{
EXTI_ClearITPendingBit(EXTI_Line0);
// 接中断服务程序代码
}
NVIC_ClearPendingIRQ(EXTI0_IRQn);二、实际应用
中断控制LED
任务要求
用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。如果完成后,尝试在main函数while循环中加入一个串口每隔1s 发送一次字符的代码片段,观察按键中断对串口发送是否会带来干扰或延迟。
代码示例
LED.c
#include "stm32f10x.h" // Device header
/**
* 函 数:LED初始化
* 参 数:无
* 返 回 值:无
*/
void LED_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}exti_key.c
#include "exti_key.h"
#include "misc.h"
void EXTI_Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // 使用 B 口的引脚 1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; // 使用与 GPIOB 引脚 1 相关的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line1);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // 将 GPIOB 和引脚 1 配置为外部中断
EXTI_InitStructure.EXTI_Line = EXTI_Line1;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}main.c
#include "stm32f10x.h" // Device header
#include "LED.h"
#include "exti_key.h"
int main(void)
{
LED_Init();
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
EXTI_Key_Init();
while (1)
{
}
}
//void EXTI1_IRQHandler(void)
//{
// if(EXTI_GetITStatus(EXTI_Line1) != RESET)
// {
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_0))));
// EXTI_ClearITPendingBit(EXTI_Line1);
// }
//}
//两种方法
uint8_t led = 1;
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) != RESET)
{
led = ~led; //状态翻转
//如果等于1,则PB1复位点亮,否则置1熄灭
if(led == 1)
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
else
GPIO_SetBits(GPIOA,GPIO_Pin_0);
}
EXTI_ClearITPendingBit(EXTI_Line1); //清除EXTI1的中断标志位
}即可实现中断控制LED灯亮灭。
中断控制串口通信
任务要求1
当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”
代码示例
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
volatile uint8_t send_enabled = 0; // 全局变量,控制发送行为
void USART_Configuration(void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 打开 GPIO 与 USART 端口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// 配置 USART1 Tx (PA.09) 为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART1 Rx (PA.10) 为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART 参数
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能 USART
USART_Cmd(USART1, ENABLE);
// 使能接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
// 配置 NVIC
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART1_IRQHandler(void) {
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = USART_ReceiveData(USART1);
if(data == 's') { // 接收到 's' 停止发送
send_enabled = 0;
} else if (data == 't') { // 接收到 't' 开始发送
send_enabled = 1;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
void Delay(__IO uint32_t nCount) {
for(; nCount != 0; nCount--);
}
int main(void) {
SystemInit();
USART_Configuration();
char *str = "hello windows!\r\n";
while(1) {
if(send_enabled) {
for(uint32_t i = 0; i < strlen(str); i++) {
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay(5000000);
}
}任务要求2
当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(提示:要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。)
代码示例
NVIC.c
#include "stm32f10x.h" // Device header
void NVIC_Configuration(void) {
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// USART Tx (PA.09) 配置为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// USART Rx (PA.10) 配置为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启接收中断
USART_Cmd(USART1, ENABLE);
}main.c
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
#include "Delay.h"
#include "Serial.h"
#include "NVIC.h"
#define BUFFER_SIZE 100
volatile char buffer[BUFFER_SIZE];
volatile int buffer_index = 0;
volatile int send_enabled = 0;
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = (char)USART_ReceiveData(USART1);
if (buffer_index < BUFFER_SIZE - 1) {
buffer[buffer_index++] = data;
buffer[buffer_index] = '\0'; // 保持字符串结尾
char* temp_buffer = (char*)buffer; // 创建一个非 volatile 指针
if (strstr(temp_buffer, "stop stm32!") != NULL) {
send_enabled = 0;
buffer_index = 0; // 清空缓冲区
} else if (strstr(temp_buffer, "go stm32!") != NULL) {
send_enabled = 1;
buffer_index = 0; // 清空缓冲区
}
}
}
}
int main(void) {
SystemInit();
Serial_Init();
NVIC_Configuration();
char *str = "hello windows!\r\n";
while (1) {
if (send_enabled) {
for (uint32_t i = 0; i < strlen(str); i++) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay_ms(500);
}
}最后使用串口助手即可(野火以及其他串口助手均可)。
总结
本章内容理解上不存在太多有问题的地方,对于中断的理解更像是正51单片机的另一个翻版,对于实践过程中的问题,远远多于理论理解,关于软件的操作,环境的配置,串口的调试运行,都是之前学习的逐渐累积,在学习上,没有一蹴而就,要脚踏实地,做好每一步,才可以更好更快,更高效率完成任务。





![[图解]SysML和EA建模住宅安全系统-07-to be块定义图](https://img-blog.csdnimg.cn/direct/4d5776842d154ef2b1b0d7f9c184f443.png)