目录
一、概述
1.1旋转
1.2平移
二、代码实现
2.1实现旋转
2.2实现平移
2.3组合变换
三、实现效果
3.1原始点云
3.2变换后点云
一、概述
在Open3D中,点云的旋转和平移是通过几何变换来实现的。几何变换可以应用于点云对象,使其在空间中移动或旋转到新的位置和方向。这些变换在许多计算机视觉和机器人应用中非常重要,比如在点云配准、物体跟踪、姿态估计等任务中。
1.1旋转
旋转是一种绕某个轴或点进行的变换。旋转可以用旋转矩阵表示,通常由旋转角度(弧度)和旋转轴定义。在Open3D中,使用rotate函数实现旋转对点云进行旋转:
- 定义旋转矩阵
- 使用欧拉角(XYZ顺序)
- 使用旋转轴和旋转角
- 应用旋转矩阵
- 使用rotate方法
它的第一个参数R 是一个旋转矩阵。由于3D物体的旋转可以通过多个参数形式来表示,Open3d提供了rotate函数,可以方便的将不同的参数变化为旋转矩阵。
- 使用get_rotation_matrix_from_xyz从欧拉角(Euler angles)转换为矩阵(这里xyz也可以是yzx,zxy,xzy,zyx和yxz)。
- 使用get_rotation_matrix_from_axis_angle从轴角(Axis-angle representation)转换
- 使用get_rotation_matrix_from_quaternion从四元数进行转换
1.2平移
平移是一种将每个点移动相同距离和方向的变换。平移可以用一个平移向量表示。在Open3D中,可以通过以下方式对点云进行平移:
- 定义平移向量,一个包含 x, y, z 位移的数组
- 应用平移向量,使用translate方法
二、代码实现
2.1实现旋转
import open3d as o3d
import numpy as np
# 读取点云文件
pcd = o3d.io.read_point_cloud("path/to/your/pointcloud.pcd")
# 定义旋转角度(弧度)
rx = np.pi / 4 # 45度
ry = np.pi / 4 # 45度
rz = np.pi / 4 # 45度
# 计算旋转矩阵
R = pcd.get_rotation_matrix_from_xyz((rx, ry, rz))
# 应用旋转矩阵到点云
pcd.rotate(R, center=(0, 0, 0)) # 以点云的原点为中心进行旋转
# 可视化旋转后的点云
o3d.visualization.draw_geometries([pcd])
2.2实现平移
import open3d as o3d
import numpy as np
# 读取点云文件
pcd = o3d.io.read_point_cloud("path/to/your/pointcloud.pcd")
# 定义平移向量
translation = [1.0, 0.5, 0.25]
# 应用平移到点云
pcd.translate(translation)
# 可视化平移后的点云
o3d.visualization.draw_geometries([pcd])
2.3组合变换
import open3d as o3d
import numpy as np
import copy
# 读取点云文件
pcd = o3d.io.read_point_cloud("path/to/your/pointcloud.pcd")
# 复制点云用于变换
pcd_transformed = copy.deepcopy(pcd)
# 定义旋转角度(弧度)
rx = np.pi / 4 # 45度
ry = np.pi / 4 # 45度
rz = np.pi / 4 # 45度
# 计算旋转矩阵
R = pcd_transformed.get_rotation_matrix_from_xyz((rx, ry, rz))
# 应用旋转矩阵到点云
pcd_transformed.rotate(R, center=(0, 0, 0)) # 以点云的原点为中心进行旋转
# 定义平移向量
translation = [1.0, 0.5, 0.25]
# 应用平移到点云
pcd_transformed.translate(translation)
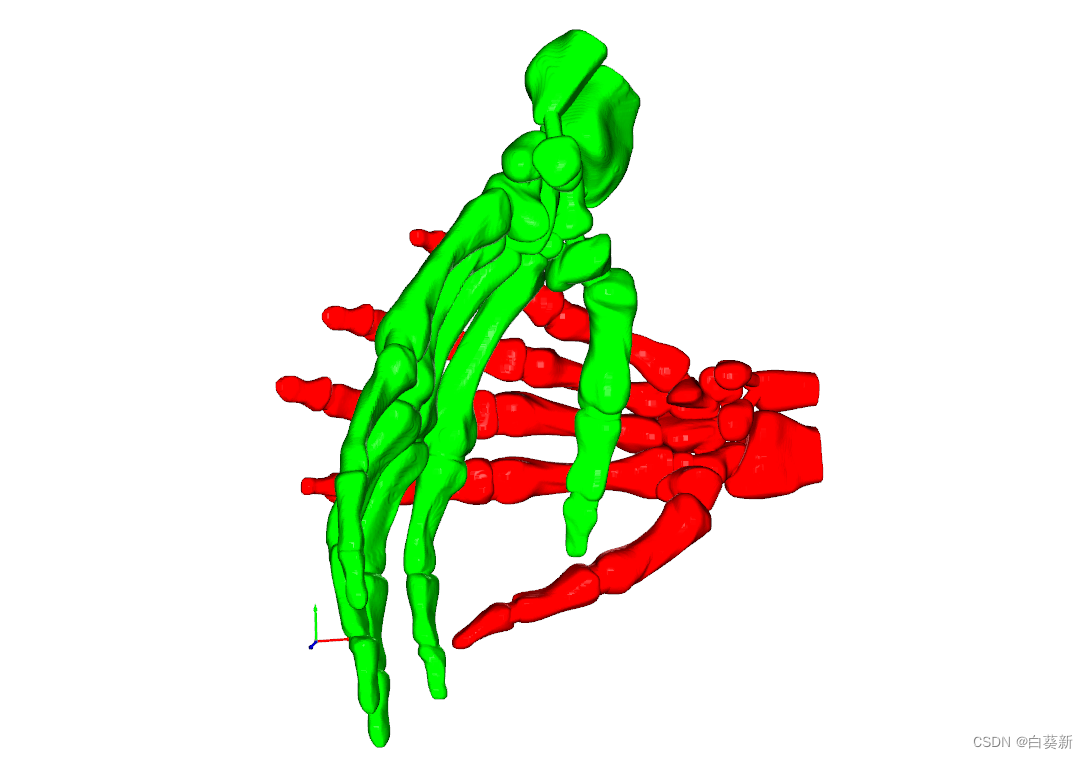
# 设置原始点云和变换后点云的颜色
pcd.paint_uniform_color([1, 0, 0]) # 原始点云设置为红色
pcd_transformed.paint_uniform_color([0, 1, 0]) # 变换后点云设置为绿色
# 创建坐标轴
axis = o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.5, origin=[0, 0, 0])
# 可视化原始点云和变换后的点云,同时显示坐标轴
o3d.visualization.draw_geometries([pcd, pcd_transformed, axis])
解释
- 读取点云数据:从文件中读取点云数据。
- 复制点云:使用 Python 的 copy.deepcopy 方法复制点云,避免对原始点云进行直接操作。
- 定义旋转角度和计算旋转矩阵:使用 get_rotation_matrix_from_xyz 计算旋转矩阵。
- 应用旋转矩阵:通过 rotate 方法对点云进行旋转。
- 定义平移向量和应用平移:通过 translate 方法对点云进行平移。
- 设置颜色:为了区分原始点云和变换后的点云,设置不同的颜色。
- 创建坐标轴:使用 create_coordinate_frame 方法创建一个坐标轴。
- 可视化:同时显示原始点云、变换后的点云和坐标轴。
通过这些步骤,可以在Open3D中实现点云的旋转和平移操作,并直观地观察点云的变换效果。
三、实现效果
3.1原始点云
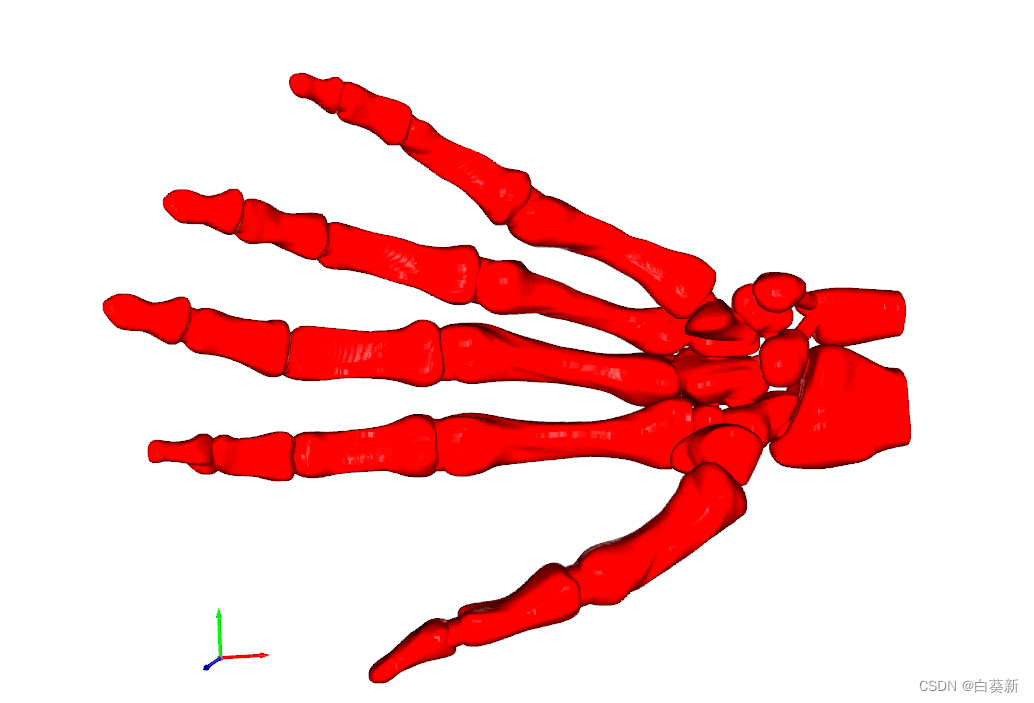
3.2变换后点云