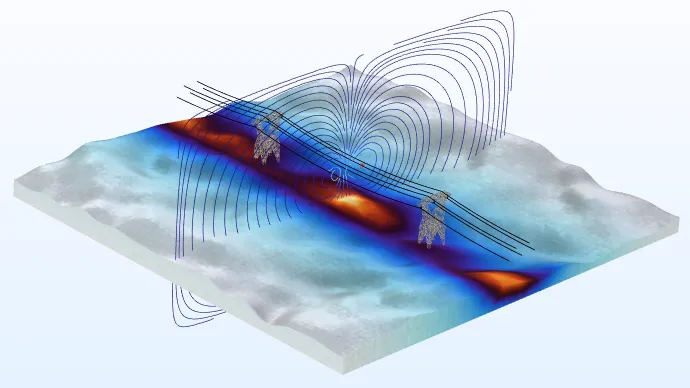
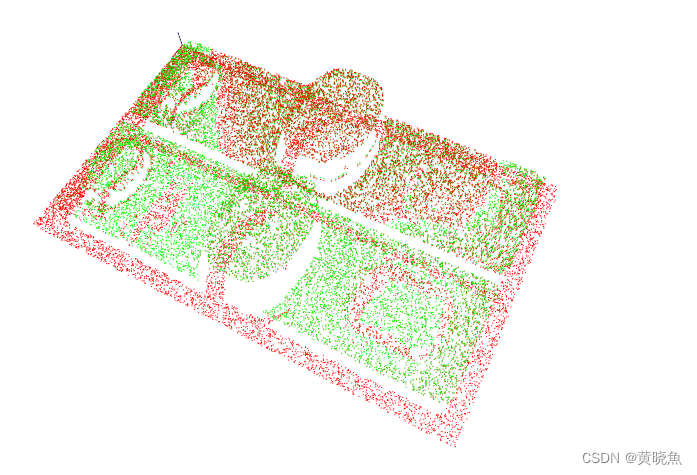
0.实现效果
原始点云
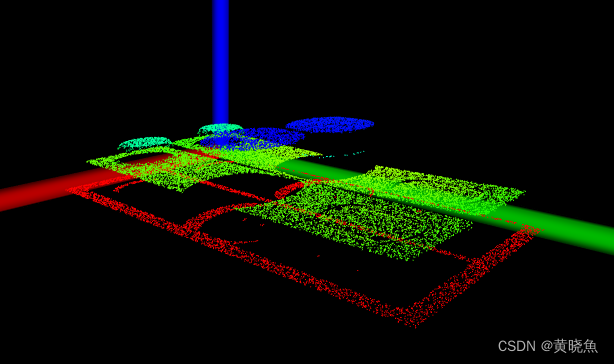
和滤波后的点云对比
1.算法原理
PCL(Point Cloud Library)快速双边滤波是一种高效的点云数据滤波方法,它基于传统双边滤波算法进行了改进,通过引入近似方法加速计算过程。以下是关于PCL快速双边滤波的详细回答:
1. 基本原理
- 空间滤波:在点云中,相邻点的空间位置通常具有相似的属性。快速双边滤波首先计算每个点与其邻近点的空间距离,根据距离阈值确定每个点的邻域。
- 强度滤波:点云的强度信息反映了其在传感器中接收到的反射强度。除了空间位置,快速双边滤波还考虑点云的强度信息,通过计算每个点与其邻域内点的灰度差异,根据灰度阈值确定是否对该点进行滤波。
2. 关键参数
- sigmaS(σS):空间域标准差,控制空间滤波的强度。在示例代码中,sigmaS通常设置为一个浮点数,如10.0f。
- sigmaR(σR):强度域标准差,控制强度滤波的强度。在示例代码中,sigmaR也通常设置为一个浮点数,如0.1f。
PCL快速双边滤波适用于各种点云数据处理场景