所谓反编译,是指将执行形式的程序转换为机器人语言程序(ASCII 文件)。作业程序(执行形式)→机器人语言程序(源程序)。
机器人语言的源程序为纯文本形式,可使用个人电脑的文本编辑器及本控制装置的“ASCII 文件编辑功能”制作源程序。
以下总结一下FD控制装置与TFD控制装置的反编译,把机器人程序的【执行形式】反编译成【语言形式(ASCII)】,以便应用于pdps、delmia等仿真软件反导现场机器人程序轨迹。
FD控制装置(通用版本)
打开示教器
登录EXPERT权限
在[维修]菜单中,将光标对准[9 程序转换]→[8 语言转换],按下[Enter]键。
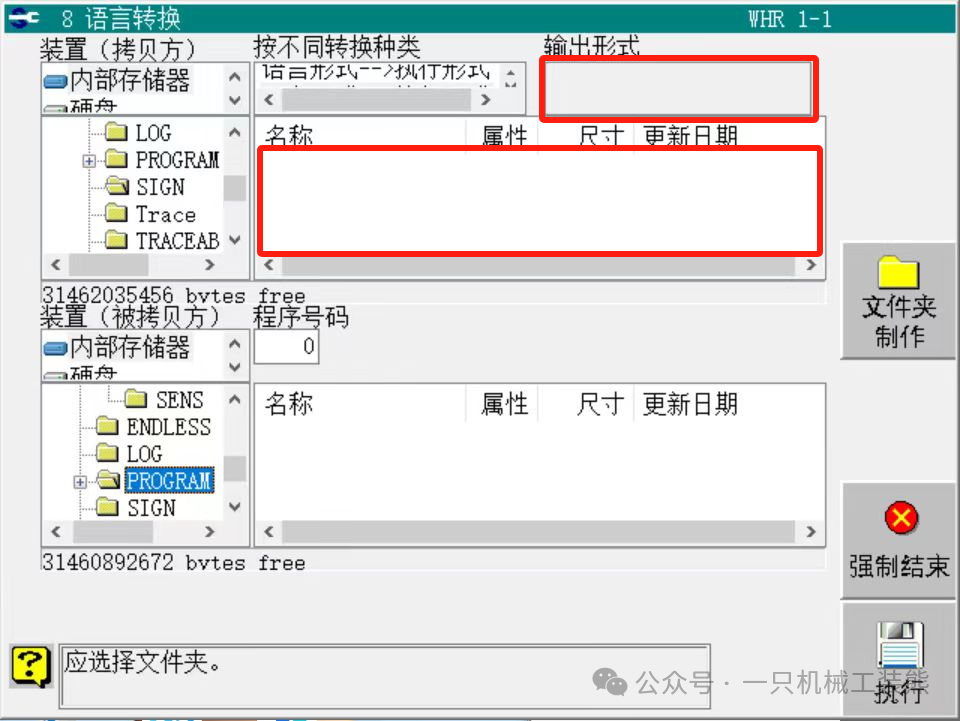
>> 显示如下[语言转换]画面。
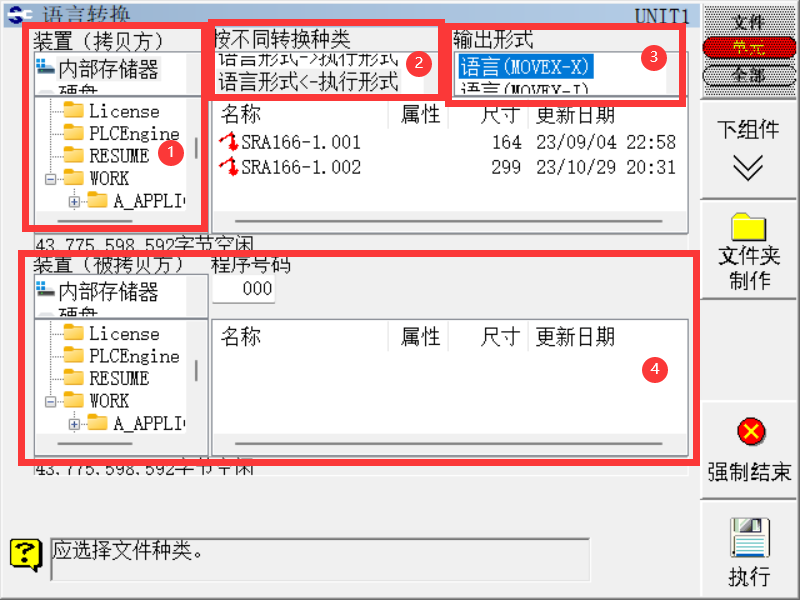
① 装置(拷贝方) :选择转换的源文件路径;
② 转换种类 :设置转换的方向,即编译/反编译;
③ 输出形式:因为在机器人语言程序中,允许移动命令有多个格式,因此在反编译时,必须对即将转换成的语言格式进行指定:
MOVEX-X:前端坐标 (X,Y,Z,r,p,y)
MOVEX-J:各轴角度(位置) (J1,J2,…,J6)
MOVEX-E:各轴编码器值 (E1,E2,…,E6)
④ 装置(被拷贝方) :转换后的程序存储路径;
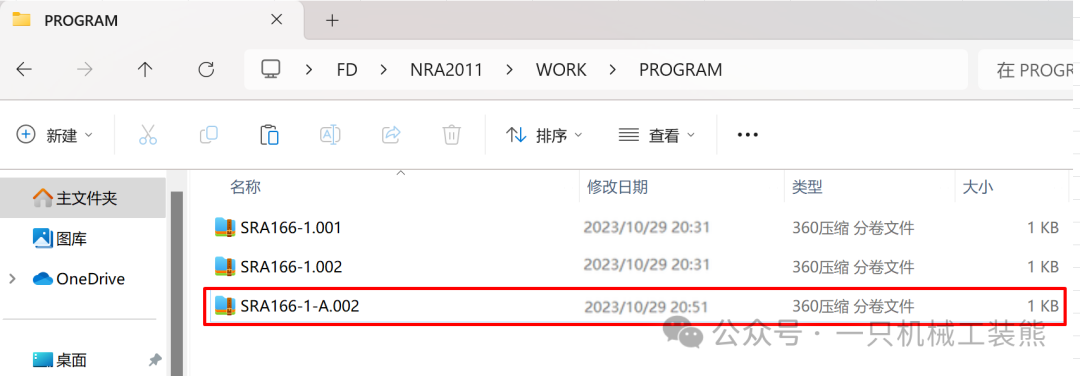
选择执行文件【SRA166-1.002】→按下【回车】→点击【执行】。
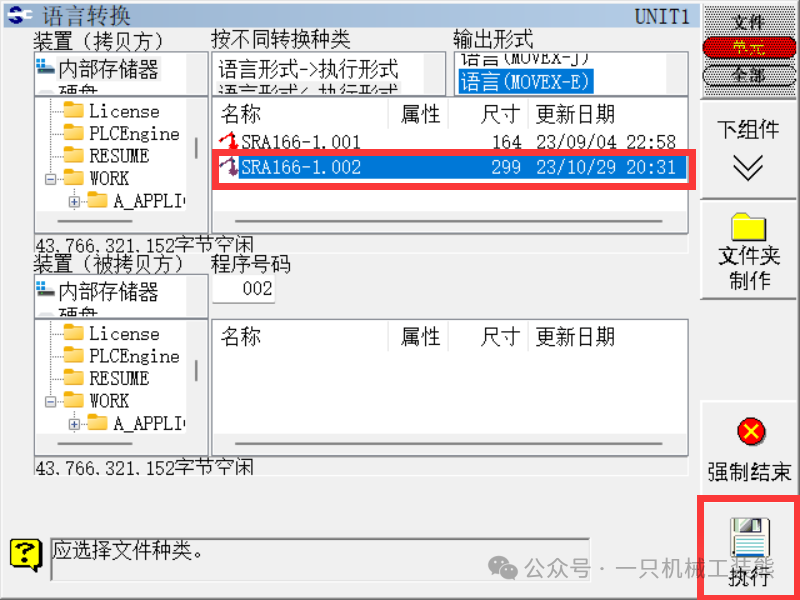
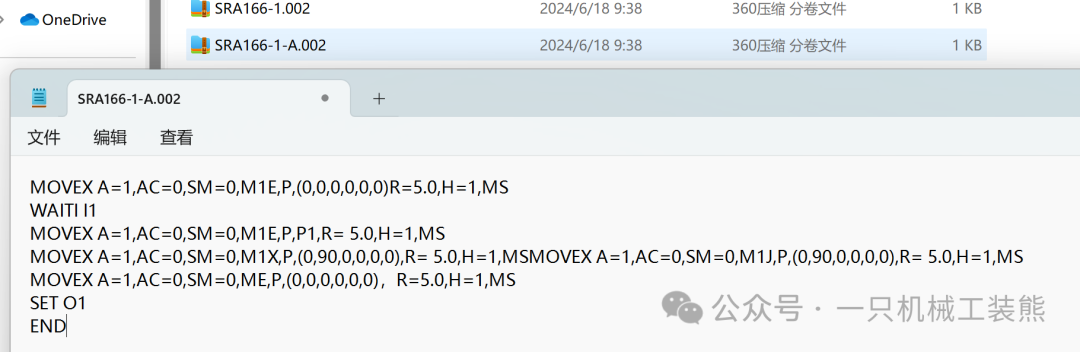
在目标文件夹可以查看生成的机器人语言形式的文本文件。
用电脑记事本就可以打开此文本文件,并可以进行编辑保存,如下。以便于仿真软件(PDPS,DELMIA等)的反导,再现现场机器人轨迹。
FD控制装置机器人语言
以上视频为FD控制装置操作说明书-机器人语言,针对NACHI那智机器人语言进一步的了解跟使用,后台回复“FD控制装置操作说明书机器人语言”即可获取此文件,参考学习。
TFD控制装置(丰田定制版)
打开示教器
登录EXPERT权限
在[维护]菜单中,将光标对准[6 程序转换]→[8 语言转换],按下[Enter]键。
>> 显示如下[语言转换]画面。
此画面看到丰田定制版TFD程序是没有识别出来,输出形式也没有,即无法通过此语言转换反编译出机器人语言程序(源程序)的文本程序。
由于定制版加密的特殊性,TFD控制装置的程序需要通过外部文件TFD-NCAROTT 程序进行转换,解码出文本程序(如下视频演示)。此转换程序文件具备编译与反编译的功能,对仿真软件离线出来的程序进行编译,转换为TFD控制装置用作业程序文件;反编译出的文本程序便可编辑提取轴值进行现场程序的反导入仿真软件,进行轨迹仿真。
那智TFD机器人程序反编译




![[数据集][目标检测]花生米计数霉变检测数据集VOC+YOLO格式387张2类别](https://img-blog.csdnimg.cn/direct/40ae64aba6654f85ba6003f6b3897f5e.png)