文章目录
- 红黑树源代码
- RBTree.h
- 红黑树模板参数的控制
- 红黑树结点当中存储的数据
- 模板参数中仿函数的增加
- 普通迭代器和const迭代器的实现
- myMap.h
- mySet.h
- RBTree.h
红黑树源代码
- 使用KV模型的红黑树进行封装,同时模拟实现出C++STL库当中的map和set
RBTree.h
//枚举定义结点的颜色
enum Colour
{
RED,
BLACK
};
//红黑树结点的定义
template<class K, class V>
struct RBTreeNode
{
//三叉链
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
//存储的键值对
pair<K, V> _kv;
//结点的颜色
Colour _col; //红/黑
//构造函数
RBTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _kv(kv)
, _col(RED)
{}
};
//红黑树的实现
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
//构造函数
RBTree()
:_root(nullptr)
{}
//拷贝构造
RBTree(const RBTree<K, V>& t)
{
_root = _Copy(t._root, nullptr);
}
//赋值运算符重载(现代写法)
RBTree<K, V>& operator=(RBTree<K, V> t)
{
swap(_root, t._root);
return *this;
}
//析构函数
~RBTree()
{
_Destroy(_root);
_root = nullptr;
}
//查找函数
Node* Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (key < cur->_kv.first) //key值小于该结点的值
{
cur = cur->_left; //在该结点的左子树当中查找
}
else if (key > cur->_kv.first) //key值大于该结点的值
{
cur = cur->_right; //在该结点的右子树当中查找
}
else //找到了目标结点
{
return cur; //返回该结点
}
}
return nullptr; //查找失败
}
//插入函数
pair<Node*, bool> Insert(const pair<K, V>& kv)
{
if (_root == nullptr) //若红黑树为空树,则插入结点直接作为根结点
{
_root = new Node(kv);
_root->_col = BLACK; //根结点必须是黑色
return make_pair(_root, true); //插入成功
}
//1、按二叉搜索树的插入方法,找到待插入位置
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (kv.first < cur->_kv.first) //待插入结点的key值小于当前结点的key值
{
//往该结点的左子树走
parent = cur;
cur = cur->_left;
}
else if (kv.first > cur->_kv.first) //待插入结点的key值大于当前结点的key值
{
//往该结点的右子树走
parent = cur;
cur = cur->_right;
}
else //待插入结点的key值等于当前结点的key值
{
return make_pair(cur, false); //插入失败
}
}
//2、将待插入结点插入到树中
cur = new Node(kv); //根据所给值构造一个结点
Node* newnode = cur; //记录新插入的结点(便于后序返回)
if (kv.first < parent->_kv.first) //新结点的key值小于parent的key值
{
//插入到parent的左边
parent->_left = cur;
cur->_parent = parent;
}
else //新结点的key值大于parent的key值
{
//插入到parent的右边
parent->_right = cur;
cur->_parent = parent;
}
//3、若插入结点的父结点是红色的,则需要对红黑树进行调整
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent; //parent是红色,则其父结点一定存在
if (parent == grandfather->_left) //parent是grandfather的左孩子
{
Node* uncle = grandfather->_right; //uncle是grandfather的右孩子
if (uncle && uncle->_col == RED) //情况1:uncle存在且为红
{
//颜色调整
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //情况2+情况3:uncle不存在 + uncle存在且为黑
{
if (cur == parent->_left)
{
RotateR(grandfather); //右单旋
//颜色调整
grandfather->_col = RED;
parent->_col = BLACK;
}
else //cur == parent->_right
{
RotateLR(grandfather); //左右双旋
//颜色调整
grandfather->_col = RED;
cur->_col = BLACK;
}
break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理
}
}
else //parent是grandfather的右孩子
{
Node* uncle = grandfather->_left; //uncle是grandfather的左孩子
if (uncle && uncle->_col == RED) //情况1:uncle存在且为红
{
//颜色调整
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //情况2+情况3:uncle不存在 + uncle存在且为黑
{
if (cur == parent->_left)
{
RotateRL(grandfather); //右左双旋
//颜色调整
cur->_col = BLACK;
grandfather->_col = RED;
}
else //cur == parent->_right
{
RotateL(grandfather); //左单旋
//颜色调整
grandfather->_col = RED;
parent->_col = BLACK;
}
break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理
}
}
}
_root->_col = BLACK; //根结点的颜色为黑色(可能被情况一变成了红色,需要变回黑色)
return make_pair(newnode, true); //插入成功
}
//删除函数
bool Erase(const K& key)
{
//用于遍历二叉树
Node* parent = nullptr;
Node* cur = _root;
//用于标记实际的待删除结点及其父结点
Node* delParentPos = nullptr;
Node* delPos = nullptr;
while (cur)
{
if (key < cur->_kv.first) //所给key值小于当前结点的key值
{
//往该结点的左子树走
parent = cur;
cur = cur->_left;
}
else if (key > cur->_kv.first) //所给key值大于当前结点的key值
{
//往该结点的右子树走
parent = cur;
cur = cur->_right;
}
else //找到了待删除结点
{
if (cur->_left == nullptr) //待删除结点的左子树为空
{
if (cur == _root) //待删除结点是根结点
{
_root = _root->_right; //让根结点的右子树作为新的根结点
if (_root)
{
_root->_parent = nullptr;
_root->_col = BLACK; //根结点为黑色
}
delete cur; //删除原根结点
return true;
}
else
{
delParentPos = parent; //标记实际删除结点的父结点
delPos = cur; //标记实际删除的结点
}
break; //进行红黑树的调整以及结点的实际删除
}
else if (cur->_right == nullptr) //待删除结点的右子树为空
{
if (cur == _root) //待删除结点是根结点
{
_root = _root->_left; //让根结点的左子树作为新的根结点
if (_root)
{
_root->_parent = nullptr;
_root->_col = BLACK; //根结点为黑色
}
delete cur; //删除原根结点
return true;
}
else
{
delParentPos = parent; //标记实际删除结点的父结点
delPos = cur; //标记实际删除的结点
}
break; //进行红黑树的调整以及结点的实际删除
}
else //待删除结点的左右子树均不为空
{
//替换法删除
//寻找待删除结点右子树当中key值最小的结点作为实际删除结点
Node* minParent = cur;
Node* minRight = cur->_right;
while (minRight->_left)
{
minParent = minRight;
minRight = minRight->_left;
}
cur->_kv.first = minRight->_kv.first; //将待删除结点的key改为minRight的key
cur->_kv.second = minRight->_kv.second; //将待删除结点的value改为minRight的value
delParentPos = minParent; //标记实际删除结点的父结点
delPos = minRight; //标记实际删除的结点
break; //进行红黑树的调整以及结点的实际删除
}
}
}
if (delPos == nullptr) //delPos没有被修改过,说明没有找到待删除结点
{
return false;
}
//记录待删除结点及其父结点(用于后续实际删除)
Node* del = delPos;
Node* delP = delParentPos;
//调整红黑树
if (delPos->_col == BLACK) //删除的是黑色结点
{
if (delPos->_left) //待删除结点有一个红色的左孩子(不可能是黑色)
{
delPos->_left->_col = BLACK; //将这个红色的左孩子变黑即可
}
else if (delPos->_right) //待删除结点有一个红色的右孩子(不可能是黑色)
{
delPos->_right->_col = BLACK; //将这个红色的右孩子变黑即可
}
else //待删除结点的左右均为空
{
while (delPos != _root) //可能一直调整到根结点
{
if (delPos == delParentPos->_left) //待删除结点是其父结点的左孩子
{
Node* brother = delParentPos->_right; //兄弟结点是其父结点的右孩子
//情况一:brother为红色
if (brother->_col == RED)
{
delParentPos->_col = RED;
brother->_col = BLACK;
RotateL(delParentPos);
//需要继续处理
brother = delParentPos->_right; //更新brother(否则在本循环中执行其他情况的代码会出错)
}
//情况二:brother为黑色,且其左右孩子都是黑色结点或为空
if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))
&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK)))
{
brother->_col = RED;
if (delParentPos->_col == RED)
{
delParentPos->_col = BLACK;
break;
}
//需要继续处理
delPos = delParentPos;
delParentPos = delPos->_parent;
}
else
{
//情况三:brother为黑色,且其左孩子是红色结点,右孩子是黑色结点或为空
if ((brother->_right == nullptr) || (brother->_right->_col == BLACK))
{
brother->_left->_col = BLACK;
brother->_col = RED;
RotateR(brother);
//需要继续处理
brother = delParentPos->_right; //更新brother(否则执行下面情况四的代码会出错)
}
//情况四:brother为黑色,且其右孩子是红色结点
brother->_col = delParentPos->_col;
delParentPos->_col = BLACK;
brother->_right->_col = BLACK;
RotateL(delParentPos);
break; //情况四执行完毕后调整一定结束
}
}
else //delPos == delParentPos->_right //待删除结点是其父结点的左孩子
{
Node* brother = delParentPos->_left; //兄弟结点是其父结点的左孩子
//情况一:brother为红色
if (brother->_col == RED) //brother为红色
{
delParentPos->_col = RED;
brother->_col = BLACK;
RotateR(delParentPos);
//需要继续处理
brother = delParentPos->_left; //更新brother(否则在本循环中执行其他情况的代码会出错)
}
//情况二:brother为黑色,且其左右孩子都是黑色结点或为空
if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))
&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK)))
{
brother->_col = RED;
if (delParentPos->_col == RED)
{
delParentPos->_col = BLACK;
break;
}
//需要继续处理
delPos = delParentPos;
delParentPos = delPos->_parent;
}
else
{
//情况三:brother为黑色,且其右孩子是红色结点,左孩子是黑色结点或为空
if ((brother->_left == nullptr) || (brother->_left->_col == BLACK))
{
brother->_right->_col = BLACK;
brother->_col = RED;
RotateL(brother);
//需要继续处理
brother = delParentPos->_left; //更新brother(否则执行下面情况四的代码会出错)
}
//情况四:brother为黑色,且其左孩子是红色结点
brother->_col = delParentPos->_col;
delParentPos->_col = BLACK;
brother->_left->_col = BLACK;
RotateR(delParentPos);
break; //情况四执行完毕后调整一定结束
}
}
}
}
}
//进行实际删除
if (del->_left == nullptr) //实际删除结点的左子树为空
{
if (del == delP->_left) //实际删除结点是其父结点的左孩子
{
delP->_left = del->_right;
if (del->_right)
del->_right->_parent = delP;
}
else //实际删除结点是其父结点的右孩子
{
delP->_right = del->_right;
if (del->_right)
del->_right->_parent = delP;
}
}
else //实际删除结点的右子树为空
{
if (del == delP->_left) //实际删除结点是其父结点的左孩子
{
delP->_left = del->_left;
if (del->_left)
del->_left->_parent = delP;
}
else //实际删除结点是其父结点的右孩子
{
delP->_right = del->_left;
if (del->_left)
del->_left->_parent = delP;
}
}
delete del; //实际删除结点
return true;
}
private:
//拷贝树
Node* _Copy(Node* root, Node* parent)
{
if (root == nullptr)
{
return nullptr;
}
Node* copyNode = new Node(root->_data);
copyNode->_parent = parent;
copyNode->_left = _Copy(root->_left, copyNode);
copyNode->_right = _Copy(root->_right, copyNode);
return copyNode;
}
//析构函数子函数
void _Destroy(Node* root)
{
if (root == nullptr)
{
return;
}
_Destroy(root->_left);
_Destroy(root->_right);
delete root;
}
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
Node* parentParent = parent->_parent;
//建立subRL与parent之间的联系
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
//建立parent与subR之间的联系
subR->_left = parent;
parent->_parent = subR;
//建立subR与parentParent之间的联系
if (parentParent == nullptr)
{
_root = subR;
_root->_parent = nullptr;
}
else
{
if (parent == parentParent->_left)
{
parentParent->_left = subR;
}
else
{
parentParent->_right = subR;
}
subR->_parent = parentParent;
}
}
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* parentParent = parent->_parent;
//建立subLR与parent之间的联系
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
//建立parent与subL之间的联系
subL->_right = parent;
parent->_parent = subL;
//建立subL与parentParent之间的联系
if (parentParent == nullptr)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
if (parent == parentParent->_left)
{
parentParent->_left = subL;
}
else
{
parentParent->_right = subL;
}
subL->_parent = parentParent;
}
}
//左右双旋
void RotateLR(Node* parent)
{
RotateL(parent->_left);
RotateR(parent);
}
//右左双旋
void RotateRL(Node* parent)
{
RotateR(parent->_right);
RotateL(parent);
}
Node* _root; //红黑树的根结点
};
红黑树模板参数的控制
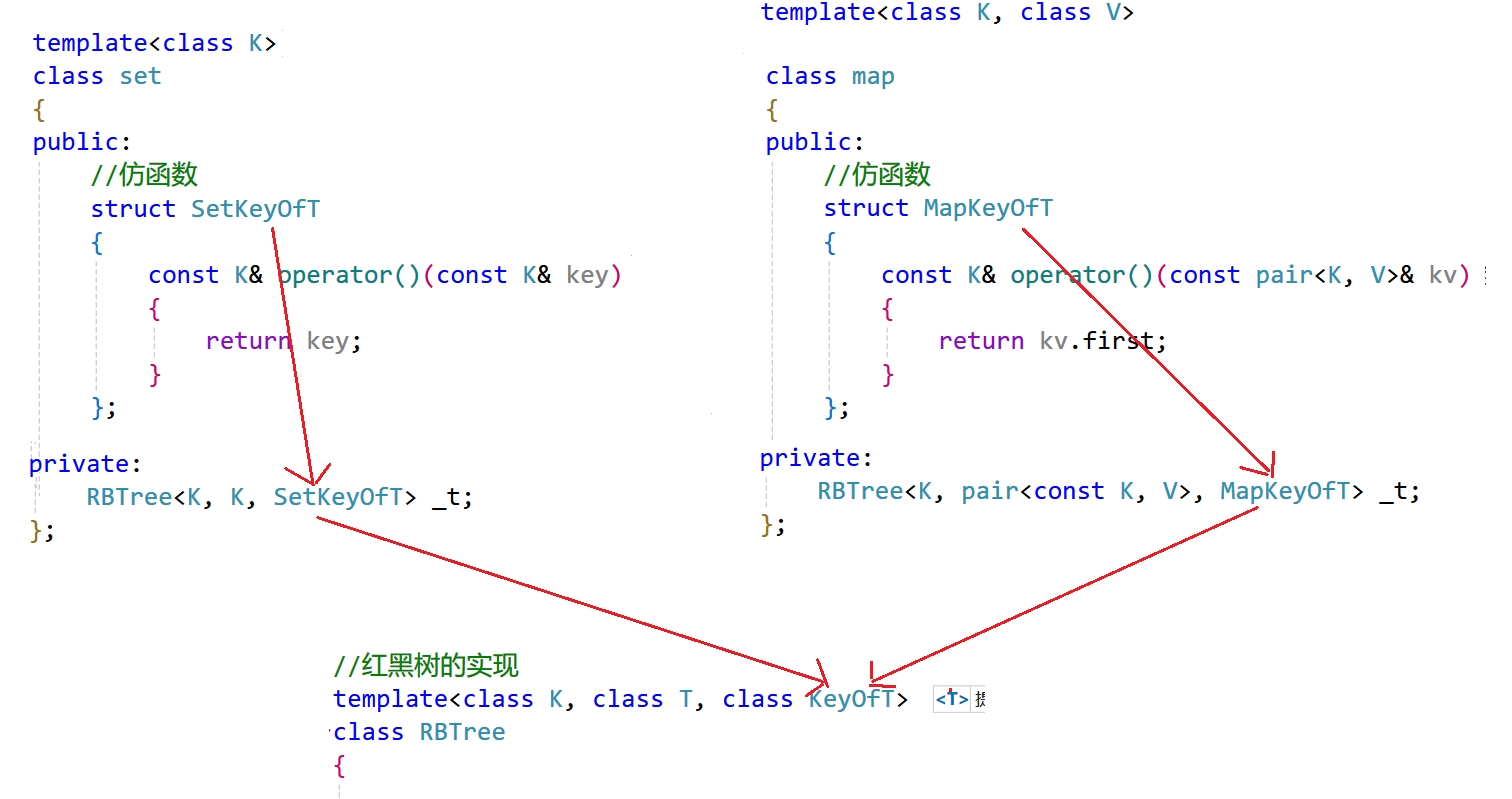
- 我们用一棵KV模型的红黑树同时实现map和set,现在将红黑树第二个模板参数的名字改为
T
template<class K, class T>
class RBTree
- T模板参数可能只是键值Key,也可能是由Key和Value共同构成的键值对。如果是set容器,那么它传入底层红黑树的模板参数就是Key和Key
template<class K>
class set
{
public:
//...
private:
RBTree<K, K> _t;
};
- 但如果是map容器,那么它传入底层红黑树的模板参数就是Key以及Key和Value构成的键值对:
template<class K, class V>
class map
{
public:
//...
private:
RBTree<K, pair<K, V>> _t;
};
那能不能不要红黑树的第一个模板参数,只保留第二个模板参数呢?
- 对于set容器来说,省略红黑树的第一个参数当然没问题,因为set传入红黑树的第二个参数与第一个参数是一样的。但是对于map容器来说就不行了,因为map容器所提供的接口当中有些是只要求给出键值Key的,比如find和erase。
红黑树结点当中存储的数据
set容器:K和T都代表键值Key。
map容器:K代表键值Key,T代表由Key和Value构成的键值对。
-
对于set容器来说,底层红黑树结点当中存储K和T都是一样的,但是对于map容器来说,底层红黑树就只能存储T了。由于底层红黑树并不知道上层容器到底是map还是set,因此红黑树的结点当中直接存储T。
-
当上层容器是set的时候,结点当中存储的是键值Key;当上层容器是map的时候,结点 当中存储的就是<Key, Value>键值对。

//红黑树结点的定义
template<class T>
struct RBTreeNode
{
//三叉链
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
//存储的数据
T _data;
//结点的颜色
Colour _col; //红/黑
//构造函数
RBTreeNode(const T& data)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _data(data)
, _col(RED)
{}
};
模板参数中仿函数的增加
-
当上层容器是set的时候T就是键值Key,直接用T进行比较即可,但当上层容器是map的时候就不行了,此时我们需要从<Key, Value>键值对当中取出键值Key后,再用Key值进行比较。
-
因此,上层容器map需要向底层红黑树提供一个仿函数,用于获取T当中的键值Key,这样一来,当底层红黑树当中需要比较两个结点的键值时,就可以通过这个仿函数来获取T当中的键值了。
-
仿函数,就是使一个类的使用看上去像一个函数。其实现就是类中实现一个operator(),这个类就有了类似函数的行为,就是一个仿函数类了。
template<class K, class V>
class map
{
//仿函数
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv) //返回键值对当中的键值Key
{
return kv.first;
}
};
public:
//...
private:
RBTree<K, pair<K, V>, MapKeyOfT> _t;
};
-
但是对于底层红黑树来说,它并不知道上层容器是map还是set,因此当需要进行两个结点键值的比较时,底层红黑树都会通过传入的仿函数来获取键值Key,进而进行两个结点键值的比较。
-
因此,set容器也需要向底层红黑树传入一个仿函数,虽然这个仿函数单独看起来没什么用,但却是必不可少的。
template<class K>
class set
{
//仿函数
struct SetKeyOfT
{
const K& operator()(const K& key) //返回键值Key
{
return key;
}
};
public:
//...
private:
RBTree<K, K, SetKeyOfT> _t;
};
- 此时,set容器传入底层红黑树的就是set的仿函数,map容器传入底层红黑树的就是map的仿函数。
-
当底层红黑树需要进行两个结点之间键值的比较时,都会通过传入的仿函数来获取相应结点的键值,然后再进行比较
-
注意: 所有进行结点键值比较的地方,均需要通过仿函数获取对应结点的键值后再进行键值的比较。
普通迭代器和const迭代器的实现
myMap.h
#pragma once
#include"RBTree.h"
namespace lsl //防止命名冲突
{
template<class K, class V>
class map
{
public:
//仿函数
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv) //返回键值对当中的键值Key
{
return kv.first;
}
};
// 对类模板取内嵌类型,加typename告诉编译器这里是类型
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator; // const迭代器
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
//插入函数
pair<iterator, bool> insert(const pair<const K, V>& kv)
{
return _t.Insert(kv);
}
//[]运算符重载函数
V& operator[](const K& key)
{
pair<iterator, bool> ret = insert(make_pair(key, V()));
return ret.first->second;
}
//删除函数
void erase(const K& key)
{
_t.Erase(key);
}
//查找函数
iterator find(const K& key)
{
return _t.Find(key);
}
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
};
}
mySet.h
#pragma once
#include "RBTree.h"
namespace lsl //防止命名冲突
{
template<class K>
class set
{
public:
//仿函数
struct SetKeyOfT
{
const K& operator()(const K& key) //返回键值Key
{
return key;
}
};
// 对类模板取内嵌类型,加typename告诉编译器这里是类型
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator;
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;//const迭代器
iterator begin() const
{
return _t.begin();
}
iterator end() const
{
return _t.end();
}
//插入函数
pair<iterator, bool> insert(const K& key)
{
return _t.Insert(key);
}
//删除函数
void erase(const K& key)
{
_t.Erase(key);
}
//查找函数
iterator find(const K& key)
{
return _t.Find(key);
}
private:
RBTree<K, K, SetKeyOfT> _t;
};
}
RBTree.h
#pragma once
#include<iostream>
using namespace std;
//枚举定义结点的颜色
enum Colour
{
RED,
BLACK
};
//红黑树结点的定义
template<class T>
struct RBTreeNode
{
//三叉链
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
//存储的数据
T _data;
//结点的颜色
Colour _col; //红/黑
//构造函数
RBTreeNode(const T& data)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _data(data)
, _col(RED)
{}
};
//正向迭代器
template<class T, class Ref, class Ptr>
struct __TreeIterator
{
typedef RBTreeNode<T> Node; //结点的类型
typedef __TreeIterator<T, Ref, Ptr> Self; //正向迭代器的类型
Node* _node; //正向迭代器所封装结点的指针
//构造函数
__TreeIterator(Node* node)
:_node(node) //根据所给结点指针构造一个正向迭代器
{}
Ref operator*()
{
return _node->_data; //返回结点数据的引用
}
Ptr operator->()
{
return &_node->_data; //返回结点数据的指针
}
//判断两个正向迭代器是否不同
bool operator!=(const Self& s) const
{
return _node != s._node; //判断两个正向迭代器所封装的结点是否是同一个
}
//判断两个正向迭代器是否相同
bool operator==(const Self& s) const
{
return _node == s._node; //判断两个正向迭代器所封装的结点是否是同一个
}
//前置++
/*
1. it指向的节点,右子树不为空,下一个右子树的最左节点
2. it指向的节点,右子树为空,it中的节点所在的子树访问完了,往上找孩子是父亲左的那个祖先
*/
Self operator++()
{
if (_node->_right) //结点的右子树不为空
{
//寻找该结点右子树当中的最左结点
Node* left = _node->_right;
while (left->_left)
{
left = left->_left;
}
_node = left; //++后变为该结点
}
else //结点的右子树为空
{
//寻找孩子不在父亲右的祖先
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent; //++后变为该结点
}
return *this;
}
//前置--
Self operator--()
{
if (_node->_left) //结点的左子树不为空
{
//寻找该结点左子树当中的最右结点
Node* right = _node->_left;
while (right->_right)
{
right = right->_right;
}
_node = right; //--后变为该结点
}
else //结点的左子树为空
{
//寻找孩子不在父亲左的祖先
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = parent;
parent = parent->_parent;
}
_node = parent; //--后变为该结点
}
return *this;
}
};
//红黑树的实现
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node; //结点的类型
public:
typedef __TreeIterator<T, T&, T*> iterator;
typedef __TreeIterator<T, const T&, const T*> const_iterator; //const迭代器
iterator begin()
{
//寻找最左结点
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
//返回最左结点的正向迭代器
return iterator(left);
}
iterator end()
{
//返回由nullptr构造得到的正向迭代器(不严谨)
return iterator(nullptr);
}
const_iterator begin()const
{
//寻找最左结点
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
//返回最左结点的正向迭代器
return const_iterator(left);
}
const_iterator end()const
{
//返回由nullptr构造得到的正向迭代器(不严谨)
return const_iterator(nullptr);
}
//构造函数
RBTree()
:_root(nullptr)
{}
//拷贝构造
RBTree(const RBTree<K, T, KeyOfT>& t)
{
_root = _Copy(t._root, nullptr);
}
//赋值运算符重载(现代写法)
RBTree<K, T, KeyOfT>& operator=(RBTree<K, T, KeyOfT> t)
{
swap(_root, t._root);
return *this; //支持连续赋值
}
//析构函数
~RBTree()
{
_Destroy(_root);
_root = nullptr;
}
//查找函数
iterator Find(const K& key)
{
KeyOfT kot;
Node* cur = _root;
while (cur)
{
if (key < kot(cur->_data)) //key值小于该结点的值
{
cur = cur->_left; //在该结点的左子树当中查找
}
else if (key > kot(cur->_data)) //key值大于该结点的值
{
cur = cur->_right; //在该结点的右子树当中查找
}
else //找到了目标结点
{
return iterator(cur); //返回该结点
}
}
return end(); //查找失败
}
//插入函数
pair<Node*, bool> Insert(const T& data)
{
if (_root == nullptr) //若红黑树为空树,则插入结点直接作为根结点
{
_root = new Node(data);
_root->_col = BLACK; //根结点必须是黑色
return make_pair(_root,true); //插入成功
}
//1、按二叉搜索树的插入方法,找到待插入位置
KeyOfT kot;
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (kot(data) < kot(cur->_data)) //待插入结点的key值小于当前结点的key值
{
//往该结点的左子树走
parent = cur;
cur = cur->_left;
}
else if (kot(data) > kot(cur->_data)) //待插入结点的key值大于当前结点的key值
{
//往该结点的右子树走
parent = cur;
cur = cur->_right;
}
else //待插入结点的key值等于当前结点的key值
{
return make_pair(cur, false); //插入失败
}
}
//2、将待插入结点插入到树中
cur = new Node(data); //根据所给值构造一个结点
Node* newnode = cur; //记录新插入的结点(便于后序返回)
if (kot(data) < kot(parent->_data)) //新结点的key值小于parent的key值
{
//插入到parent的左边
parent->_left = cur;
cur->_parent = parent;
}
else //新结点的key值大于parent的key值
{
//插入到parent的右边
parent->_right = cur;
cur->_parent = parent;
}
//3、若插入结点的父结点是红色的,则需要对红黑树进行调整
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent; //parent是红色,则其父结点一定存在
if (parent == grandfather->_left) //parent是grandfather的左孩子
{
Node* uncle = grandfather->_right; //uncle是grandfather的右孩子
if (uncle && uncle->_col == RED) //情况1:uncle存在且为红
{
//颜色调整
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //情况2+情况3:uncle不存在 + uncle存在且为黑
{
if (cur == parent->_left)
{
RotateR(grandfather); //右单旋
//颜色调整
grandfather->_col = RED;
parent->_col = BLACK;
}
else //cur == parent->_right
{
RotateLR(grandfather); //左右双旋
//颜色调整
grandfather->_col = RED;
cur->_col = BLACK;
}
break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理
}
}
else //parent是grandfather的右孩子
{
Node* uncle = grandfather->_left; //uncle是grandfather的左孩子
if (uncle && uncle->_col == RED) //情况1:uncle存在且为红
{
//颜色调整
uncle->_col = parent->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //情况2+情况3:uncle不存在 + uncle存在且为黑
{
if (cur == parent->_left)
{
RotateRL(grandfather); //右左双旋
//颜色调整
cur->_col = BLACK;
grandfather->_col = RED;
}
else //cur == parent->_right
{
RotateL(grandfather); //左单旋
//颜色调整
grandfather->_col = RED;
parent->_col = BLACK;
}
break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理
}
}
}
_root->_col = BLACK; //根结点的颜色为黑色(可能被情况一变成了红色,需要变回黑色)
return make_pair(newnode, true); //插入成功
}
//删除函数
bool Erase(const K& key)
{
KeyOfT kot;
//用于遍历二叉树
Node* parent = nullptr;
Node* cur = _root;
//用于标记实际的待删除结点及其父结点
Node* delParentPos = nullptr;
Node* delPos = nullptr;
while (cur)
{
if (key < kot(cur->_data)) //所给key值小于当前结点的key值
{
//往该结点的左子树走
parent = cur;
cur = cur->_left;
}
else if (key > kot(cur->_data)) //所给key值大于当前结点的key值
{
//往该结点的右子树走
parent = cur;
cur = cur->_right;
}
else //找到了待删除结点
{
if (cur->_left == nullptr) //待删除结点的左子树为空
{
if (cur == _root) //待删除结点是根结点
{
_root = _root->_right; //让根结点的右子树作为新的根结点
if (_root)
{
_root->_parent = nullptr;
_root->_col = BLACK; //根结点为黑色
}
delete cur; //删除原根结点
return true;
}
else
{
delParentPos = parent; //标记实际删除结点的父结点
delPos = cur; //标记实际删除的结点
}
break; //进行红黑树的调整以及结点的实际删除
}
else if (cur->_right == nullptr) //待删除结点的右子树为空
{
if (cur == _root) //待删除结点是根结点
{
_root = _root->_left; //让根结点的左子树作为新的根结点
if (_root)
{
_root->_parent = nullptr;
_root->_col = BLACK; //根结点为黑色
}
delete cur; //删除原根结点
return true;
}
else
{
delParentPos = parent; //标记实际删除结点的父结点
delPos = cur; //标记实际删除的结点
}
break; //进行红黑树的调整以及结点的实际删除
}
else //待删除结点的左右子树均不为空
{
//替换法删除
//寻找待删除结点右子树当中key值最小的结点作为实际删除结点
Node* minParent = cur;
Node* minRight = cur->_right;
while (minRight->_left)
{
minParent = minRight;
minRight = minRight->_left;
}
cur->_data = minRight->_data; //将待删除结点的_data改为minRight的_data
delParentPos = minParent; //标记实际删除结点的父结点
delPos = minRight; //标记实际删除的结点
break; //进行红黑树的调整以及结点的实际删除
}
}
}
if (delPos == nullptr) //delPos没有被修改过,说明没有找到待删除结点
{
return false;
}
//记录待删除结点及其父结点(用于后续实际删除)
Node* del = delPos;
Node* delP = delParentPos;
//调整红黑树
if (delPos->_col == BLACK) //删除的是黑色结点
{
if (delPos->_left) //待删除结点有一个红色的左孩子(不可能是黑色)
{
delPos->_left->_col = BLACK; //将这个红色的左孩子变黑即可
}
else if (delPos->_right) //待删除结点有一个红色的右孩子(不可能是黑色)
{
delPos->_right->_col = BLACK; //将这个红色的右孩子变黑即可
}
else //待删除结点的左右均为空
{
while (delPos != _root) //可能一直调整到根结点
{
if (delPos == delParentPos->_left) //待删除结点是其父结点的左孩子
{
Node* brother = delParentPos->_right; //兄弟结点是其父结点的右孩子
//情况一:brother为红色
if (brother->_col == RED)
{
delParentPos->_col = RED;
brother->_col = BLACK;
RotateL(delParentPos);
//需要继续处理
brother = delParentPos->_right; //更新brother(否则在本循环中执行其他情况的代码会出错)
}
//情况二:brother为黑色,且其左右孩子都是黑色结点或为空
if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))
&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK)))
{
brother->_col = RED;
if (delParentPos->_col == RED)
{
delParentPos->_col = BLACK;
break;
}
//需要继续处理
delPos = delParentPos;
delParentPos = delPos->_parent;
}
else
{
//情况三:brother为黑色,且其左孩子是红色结点,右孩子是黑色结点或为空
if ((brother->_right == nullptr) || (brother->_right->_col == BLACK))
{
brother->_left->_col = BLACK;
brother->_col = RED;
RotateR(brother);
//需要继续处理
brother = delParentPos->_right; //更新brother(否则执行下面情况四的代码会出错)
}
//情况四:brother为黑色,且其右孩子是红色结点
brother->_col = delParentPos->_col;
delParentPos->_col = BLACK;
brother->_right->_col = BLACK;
RotateL(delParentPos);
break; //情况四执行完毕后调整一定结束
}
}
else //delPos == delParentPos->_right //待删除结点是其父结点的左孩子
{
Node* brother = delParentPos->_left; //兄弟结点是其父结点的左孩子
//情况一:brother为红色
if (brother->_col == RED) //brother为红色
{
delParentPos->_col = RED;
brother->_col = BLACK;
RotateR(delParentPos);
//需要继续处理
brother = delParentPos->_left; //更新brother(否则在本循环中执行其他情况的代码会出错)
}
//情况二:brother为黑色,且其左右孩子都是黑色结点或为空
if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))
&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK)))
{
brother->_col = RED;
if (delParentPos->_col == RED)
{
delParentPos->_col = BLACK;
break;
}
//需要继续处理
delPos = delParentPos;
delParentPos = delPos->_parent;
}
else
{
//情况三:brother为黑色,且其右孩子是红色结点,左孩子是黑色结点或为空
if ((brother->_left == nullptr) || (brother->_left->_col == BLACK))
{
brother->_right->_col = BLACK;
brother->_col = RED;
RotateL(brother);
//需要继续处理
brother = delParentPos->_left; //更新brother(否则执行下面情况四的代码会出错)
}
//情况四:brother为黑色,且其左孩子是红色结点
brother->_col = delParentPos->_col;
delParentPos->_col = BLACK;
brother->_left->_col = BLACK;
RotateR(delParentPos);
break; //情况四执行完毕后调整一定结束
}
}
}
}
}
//进行实际删除
if (del->_left == nullptr) //实际删除结点的左子树为空
{
if (del == delP->_left) //实际删除结点是其父结点的左孩子
{
delP->_left = del->_right;
if (del->_right)
del->_right->_parent = delP;
}
else //实际删除结点是其父结点的右孩子
{
delP->_right = del->_right;
if (del->_right)
del->_right->_parent = delP;
}
}
else //实际删除结点的右子树为空
{
if (del == delP->_left) //实际删除结点是其父结点的左孩子
{
delP->_left = del->_left;
if (del->_left)
del->_left->_parent = delP;
}
else //实际删除结点是其父结点的右孩子
{
delP->_right = del->_left;
if (del->_left)
del->_left->_parent = delP;
}
}
delete del; //实际删除结点
return true;
}
private:
//拷贝树
Node* _Copy(Node* root, Node* parent)
{
if (root == nullptr)
{
return nullptr;
}
Node* copyNode = new Node(root->_data);
copyNode->_parent = parent;
copyNode->_left = _Copy(root->_left, copyNode);
copyNode->_right = _Copy(root->_right, copyNode);
return copyNode;
}
//析构函数子函数
void _Destroy(Node* root)
{
if (root == nullptr)
{
return;
}
_Destroy(root->_left);
_Destroy(root->_right);
delete root;
}
//左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
Node* parentParent = parent->_parent;
//建立subRL与parent之间的联系
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
//建立parent与subR之间的联系
subR->_left = parent;
parent->_parent = subR;
//建立subR与parentParent之间的联系
if (parentParent == nullptr)
{
_root = subR;
_root->_parent = nullptr;
}
else
{
if (parent == parentParent->_left)
{
parentParent->_left = subR;
}
else
{
parentParent->_right = subR;
}
subR->_parent = parentParent;
}
}
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* parentParent = parent->_parent;
//建立subLR与parent之间的联系
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
//建立parent与subL之间的联系
subL->_right = parent;
parent->_parent = subL;
//建立subL与parentParent之间的联系
if (parentParent == nullptr)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
if (parent == parentParent->_left)
{
parentParent->_left = subL;
}
else
{
parentParent->_right = subL;
}
subL->_parent = parentParent;
}
}
//左右双旋
void RotateLR(Node* parent)
{
RotateL(parent->_left);
RotateR(parent);
}
//右左双旋
void RotateRL(Node* parent)
{
RotateR(parent->_right);
RotateL(parent);
}
Node* _root; //红黑树的根结点
};






![[分布式网络通讯框架]----Zookeeper客户端基本操作----ls、get、create、set、delete](https://img-blog.csdnimg.cn/direct/6f3e3faf41b647faa232e2d275006134.png)