实验目的与要求
1、让学生更加理解进程控制的概念和具体操作方法;
2、让学生更加理解信号的概念和具体使用方法;
3、让学生更加理解Unix shell程序的原理和实现方法;
实验原理与内容
shell是一种交互式的命令行解释器,能代表用户运行程序。shell反复打印一个提示符等待stdin上的命令行,然后按照命令行的内容执行命令,如下图所示:
命令行是由空格分隔的ASCII字符串。命令行的第一个字符串要么是一个内置命令的名称,要么是一个可执行文件的路径名,剩下的字符串则为命令行参数。如果命令行的第一个字符串是一个内置命令,则shell会立即在当前进程中执行该命令。如果命令行的第一个字符串不是一个内置命令,shell会假定该字符串是一个可执行文件的路径名,在这种情况下shell会创建一个子进程并在子进程的上下文中加载和执行该可执行文件。每运行一个可执行文件将创建一个子进程,这些子进程组成shell的工作集,工作集中的各个子进程可以通过Unix管道进行连接。
如果命令行以符号“&”结尾,那么程序会在后台执行,这意味着shell不会等待程序的终止,shell会立即打印提示符并等待下一个命令输入。否则,程序会在前台执行,这意味着shell会等待程序终止后才能接收下一个命令行的输入。因此,在某一时刻系统中最多只能有一个前台任务,但是可以有任意数量的后台任务。
例如,输入命令行“jobs”会使得shell执行“jobs”这个内置命令。如果输入“/bin/ls -l -d”,则shell会在前台运行“/bin/ls”可执行文件,一般来说shell会保证程序会从可执行文件的main()函数开始执行,main()函数的声明如下所示:
int main(int argc, char *argv[])
在这个例子里参数argc和argv会有以下的值:
·argc == 3
·argv[0] == “/bin/ls”
·argv[1]== “-l”
·argv[2]== “-d”
如果输入命令“/bin/ls -l -d &”,则shell会在后台执行“/bin/ls”程序。
Unix shell支持任务控制的概念,它允许用户将任务在后台和前台之间来回切换,并更改任务中进程的状态(运行、停止或终止)。输入ctrl-c将导致一个SIGINT信号被传递到前台任务中的每个进程。这个SIGINT信号的默认操作是终止进程。类似地,输入ctrl-z会传递SIGTSTP信号给前台任务中的每个进程。SIGTSTP的默认操作是让一个进程处于停止状态,直到接收SIGCONT唤醒信号。Unix shell还提供各种支持任务控制的内置命令。例如:
• jobs: 列出正在运行或已经停止的后台任务.
• bg <job>: 将一个停止的后台任务启动起来.
• fg <job>: 将一个正在执行的或已经停止的后台任务切换到前台并运行起来.
• kill <job>:终止一个任务.
本实验的内容是编写一个简单的shell程序“tsh”,“tsh”要具有以下功能:
(1)命令行提示符字符串应为“tsh> ”。
(2)用户输入的命令行应由一个命令名称以及0个或多个参数所组成,命令名称和各个参数之间用一个或多个空格隔开。如果命令名称是一个内置命令,则tsh将在当前进程马上执行该命令然后才能接收下一个命令行输入。否则tsh应该假设该命令名称是一个可执行文件,并在子进程的上下文中加载和执行该可执行文件。
(3)tsh不需要有管道和IO重定向功能。
(4)输入ctrl-c(或ctrl-z)将发送一个SIGINT(或SIGTSTP)信号到当前前台任务以及该任务的任何子进程(它fork出来的任何子进程)。如果当前没有前台任务,则信号不应该产生任何作用。
(5)如果命令行是以“&”结尾的话,则命令要在后台执行,否则要在前台执行。
(6)tsh要给每一个任务分配一个正整数作为进程ID(PID)或任务ID(JID)。JID在命令行通过“%”进行引用,例如“%5”代表JID 5。而PID在命令行中直接通过数字引用,例如“5”代表PID 5。
(7)tsh要支持下列内置命令:
quit:终止并退出tsh程序;
jobs:列出所有后台任务;
bg <job>:给<job>发送一个SIGCONT信号使其在后台继续运行起来,<job>参数可以是PID或JID。
fg <job>:给<job>发送一个SIGCONT信号使其在前台继续运行起来,<job>参数可以是PID或JID。
(8)tsh要回收其所有的僵死子进程。如果任何进程因接收到没有在其进程中被捕获的信号而终止,那么tsh应该识别到这个事件,并打印一条带有进程PID和对该信号描述的信息。
实验设备与软件环境
1.Linux操作系统—64位 Ubuntu 18.04
2. C编译环境(gcc)
3. 计算机
实验过程与结果(可贴图)
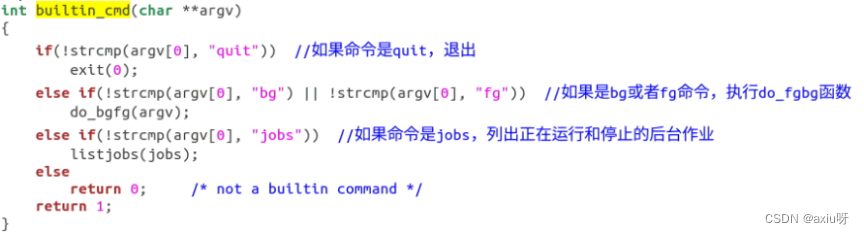
1、BuiltinCmd()函数的实现:通过比较用户输入与预设的内置指令列表,决定是否直接在当前进程内执行对应功能。若匹配成功,则直接调用相应函数并返回1;否则,表明该指令非内置,返回0以进一步处理
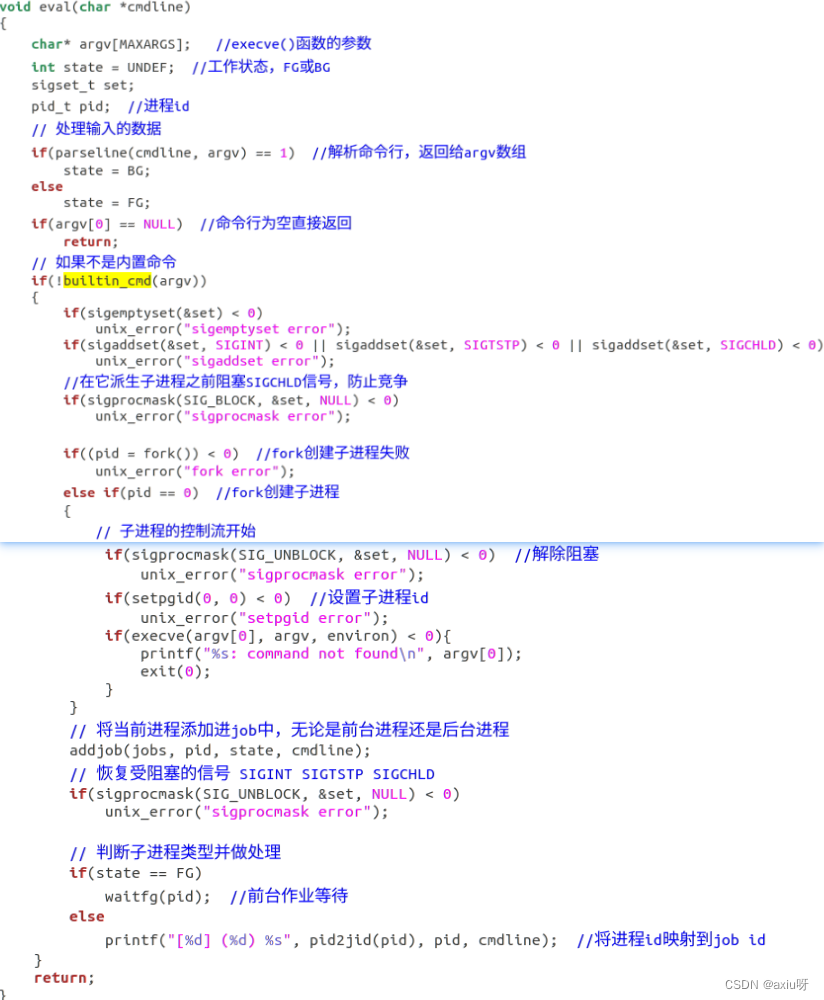
2、Eval()函数解析逻辑:
主要的思路:可以通过书上P525的eval函数写法和所需的功能来完成函数
- 创建处理输入的数据的函数,调用parseline函数解析命令行
- 使用builtin_cmd( )函数判断内置命令,如果是的话直接执行
- 如果不是内置命令的话,就先阻塞信号,再调用fork创建子进程
- 在子进程中,首先接触阻塞,设置id号,调用execve来执行job
- 父进程判断作业是否后台运行,是的话调用addjob函数将子进程job加入job链表中,解除阻塞,调用waifg函数等待前台运行完成。不是的话后台工作则打印进程组jid和子进程pid以及命令行字符串。
在执行新程序之前,子程序必须确保解开对SIGCHLD信号的阻塞。父进程必须使用sigprocmask在它派生子进程之前也就是调用fork()函数之前阻塞SIGCHLD信号,之后解除阻塞;在通过调用addjob将子进程添加到作业列表之后,再次使用sigprocmask,解除阻塞。
自动测试tsh:
·按test01.txt测试,对比tshref的运行输出;
·按rtest01.txt测试,对比tshref的运行输出;
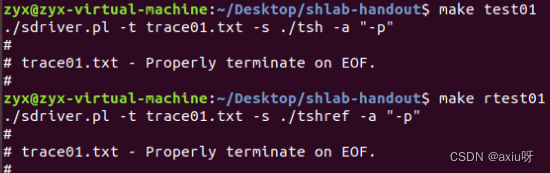
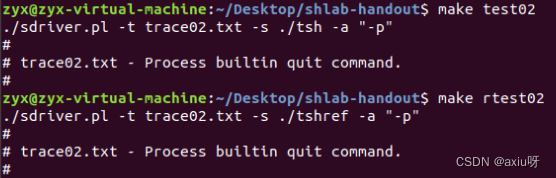
得出的结果一致
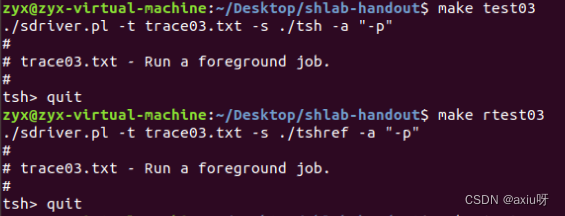
·trace03.txt测试tsh(对比tshref)命令及前台作业功能,正常:
3、sigchld_handler()函数:处理信号(课本P544)
函数原型:void sigchld_handler(int sig),参数为信号类型
一个进程可以通过调用 waitpid() 函数来等待它的子进程停止。如果回收成功,则返回为子进程的 PID, 如果 WNOHANG, 则返回为 0, 如果其他错误,则为 -1。
用while循环调用waitpid直到它所有的子进程停止。
3、sigchld_handler()函数:处理信号(课本P544)
函数原型:void sigchld_handler(int sig),参数为信号类型
一个进程可以通过调用 waitpid() 函数来等待它的子进程停止。如果回收成功,则返回为子进程的 PID, 如果 WNOHANG, 则返回为 0, 如果其他错误,则为 -1。
用while循环调用waitpid直到它所有的子进程停止。

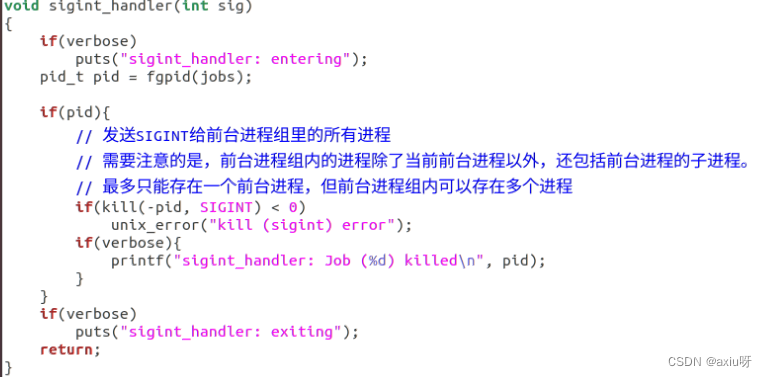
4、sigint_handler()函数:
调用函数fgpid返回前台进程pid
如果当前进程pid不为0,那么调用kill函数发送SIGINT信号给前台进程组
在2中调用kill函数如果返回值为-1表示进程不存在。输出error
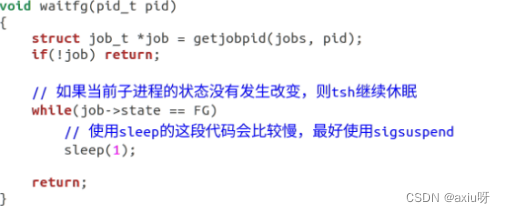
5、waitfg()函数:等待一个前台作业结束,或者说是阻塞一个前台的进程直到这个进程变为后台进程
函数原型:void waitfg(pid_t pid) ,参数为进程ID
判断当前的前台的进程组pid是否和当前进程的pid是否相等,如果相等则sleep直到前台进程结束。
4、do_bgfg()函数:实现内置命令bg 和 fg
函数原型:void do_bgfg(char **argv),参数为argv 参数列表
首先通过getjobjid函数判断输入的pid/jid对应的进程是否存在;
无论是bg还是fg,都需要让其继续运行(不论为停止状态还是运行状态);
如果是bg,将作业状态设置为BG表示后台运行;
如果是fg,将作业状态设置为FG表示前台运行,并等待前台作业终止;
前3关做完了,后面的关卡看一下trace__的文件
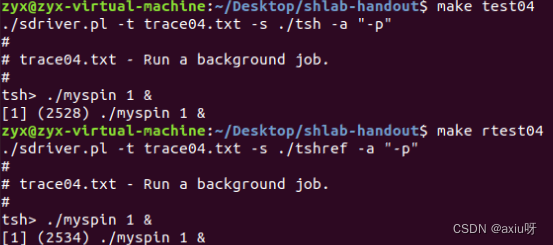
第四关-后台与前台任务处理:当命令以"&"%"标识符结束时,表明任务需在后台异步执行,shell随即打印提示符准备接收新的命令。否则,任务在前台执行,即shell等待该任务完成才继续。此外,确保了前台仅单一任务,但可同时有多个后台任务并发。
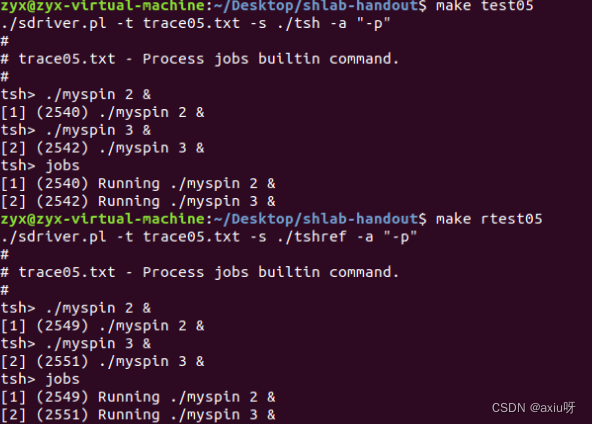
第五关-处理jobs内置命令:分别运行了前台echo、后台myspin、前台echo、后台myspin,然后需要实现一个内置命令job,功能是显示目前任务列表中的所有任务的所有属性
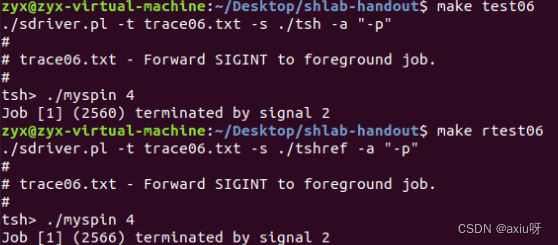
第六关-信号处理机制:集成对SIGINT和SIGTSTP信号的响应,分别对应于用户按下Ctrl-C与Ctrl-Z。信号处理逻辑确保无前台任务时,信号不触发任何动作;反之,适配对任务发送信号并执行默认行为——终止或暂停。
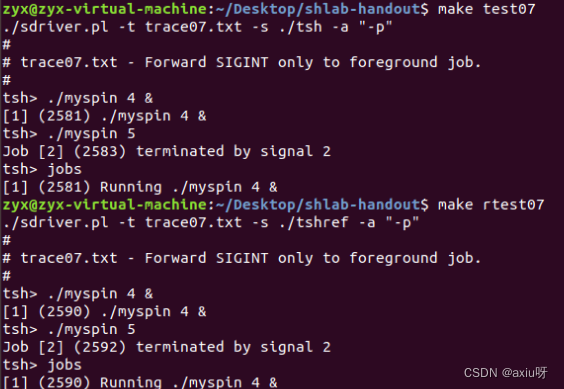
第七关-仅将SIGINT转发给前台作业:第七关测试的是只将SIGINT转发给前台作业。这里的命令行其实根据前面的就很好理解了,就是给出两个作业,一个在前台工作,另一个在后台工作,接下来传递SIGINT指令,然后调用内置指令jobs来查看此时的工作信息,来对比出是不是只将SIGINT转发给前台作业。
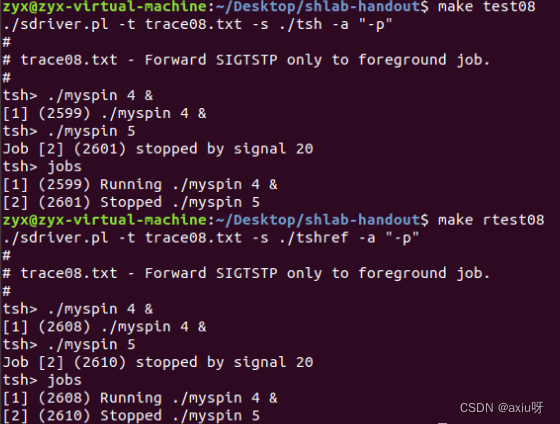
第八关-仅将SIGTSTP转发到前台作业:需要将SIGTSTP转发给前台作业。根据这个信号的作用,也就是该进程会停止直到下一个SIGCONT也就是挂起,让别的程序继续运行。这里也就是运行了后台程序,然后使用jobs来打印出进程的信息。
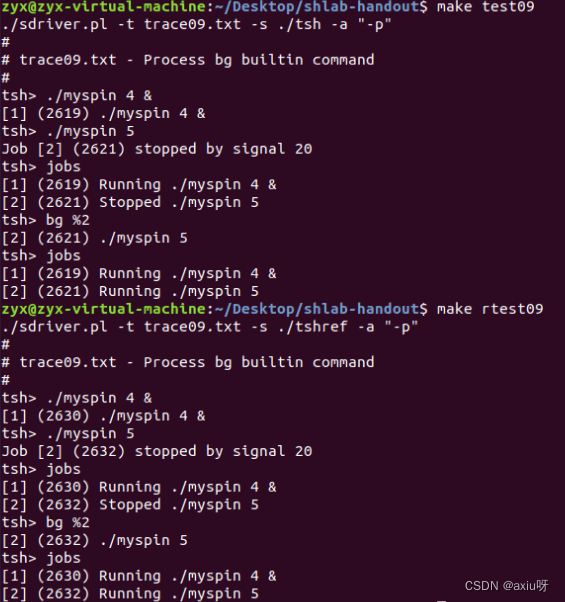
第九关-进程bg内置命令:在第八关的测试文件之上的一个更加完整的测试,这里也就是在停止后,输出进程信息之后,使用bg命令来唤醒进程2,也就是刚才被挂起的程序,接下来继续使用Jobs命令来输出结果。
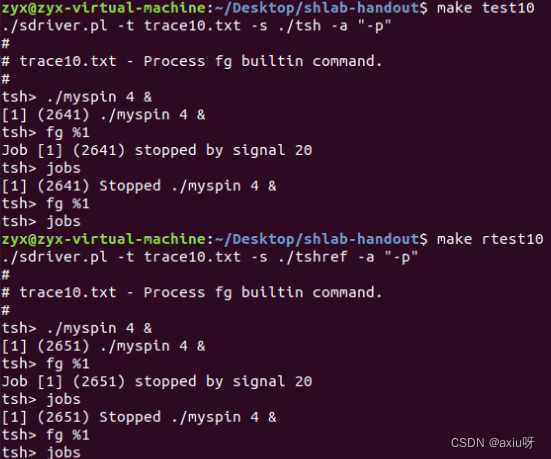
第十关-进程fg内置命令:将后台的进程更改为前台正在运行的程序。测试文中进程1根据&可以知道,进程1是一个后台进程。先使用fg命令将其转化为前台的一个程序,接下来停止进程1,然后打印出进程信息,这时候进程1应该是前台程序同时被挂起了,接下来使用fg命令使其继续运行,使用jobs来打印出进程信息
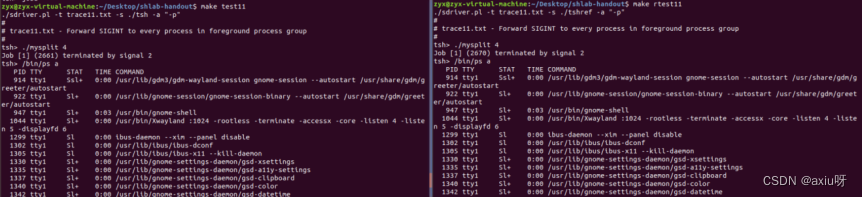
第十一关-将SIGINT转发给前台进程组中的每个进程:需要将SIGINT发给前台进程组中的每个进程。ps –a 显示所有进程,这里是有两个进程的,mysplit创建了一个子进程,接下来发送指令SIGINT,所以进程组中的所有进程都应该停止,接下来调用pl来查看该进程组中的每个进程是否都停止了。
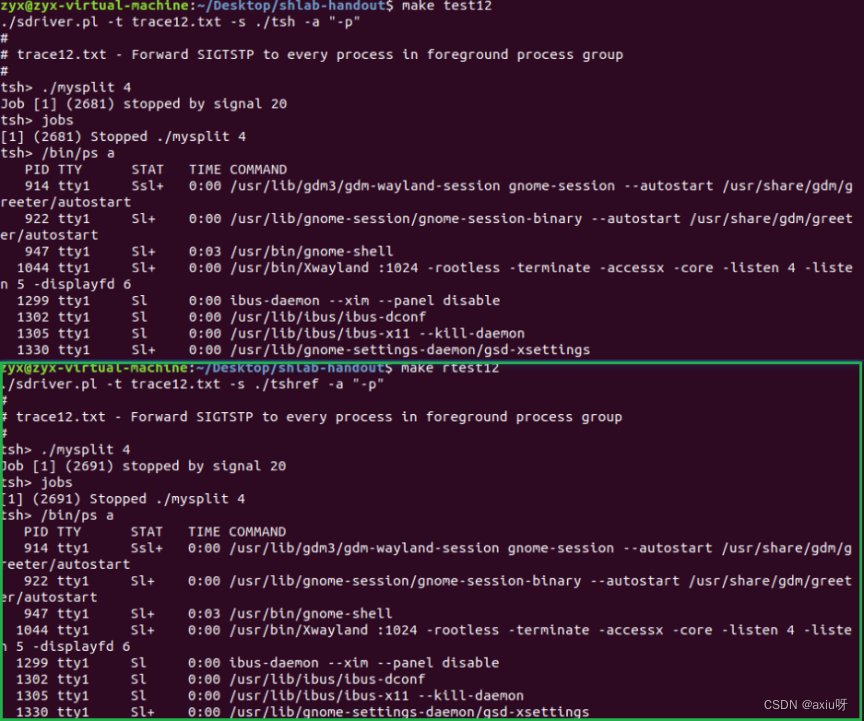
第十二关-将SIGTSTP转发到前台进程组中的每个进程:该测试程序是为了测试将SIGTSTP转发给前台进程组中的每个进程。与上一关相同,只需要相应的进程被挂起即可。
第十三关-重新启动进程组中的每个已停止的进程:该程序是为了测试重新启动进程组中的每个停止的进程。这里也就是使用fg来唤醒整个工作,中间使用ps -a来查看停止整个工作和唤醒整个工作的区别。

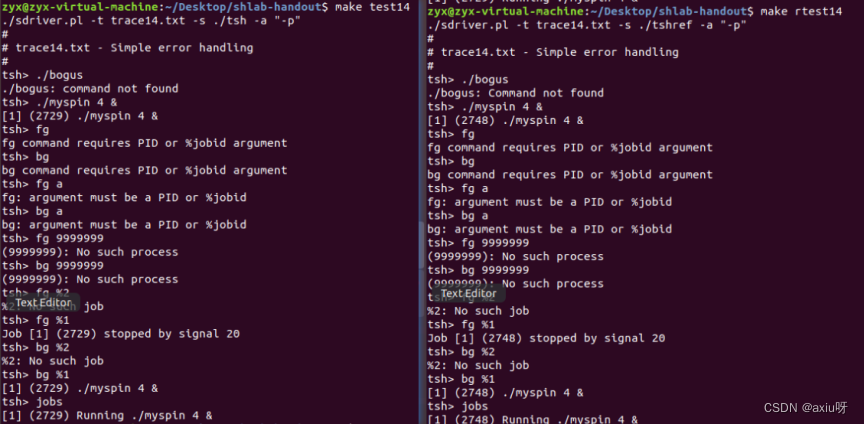
第十四关-简单的错误处理:为了测试简单的错误处理。这里的测试文件,也就是测试fg和bg后面的参数,我们知道fg和bg后面需要一个JID或者是PID,其中JID是加上%的整型数。其余参数都应该报错,或是没有参数也应该报错。接下来测试的功能,都在上面的关卡测试过了
第十五关-结合在一起

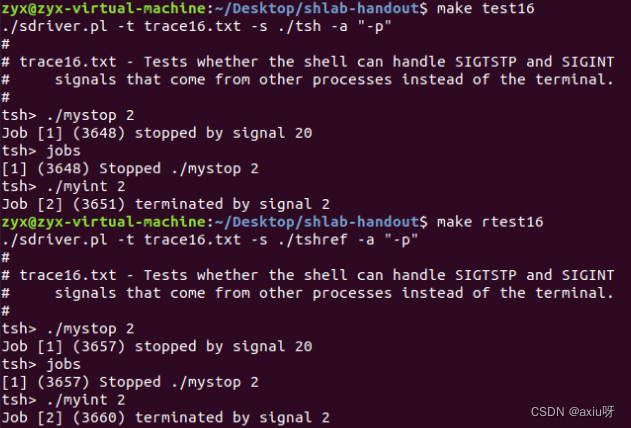
第十六关-测试shell是否能够处理来自其他进程而不是终端的SIGTSTP和SIGINT信号:这个测试文件的具体含义就是,用户程序向job 2传送了中止信号,所以最后会输出进程2被中止的信息。同时,mystop需要自己停止才能给别的进程发送信号,所以中间也会出现进程1被中止的信息
实验总结
在本次Shell实验室实践中,我深入探索了构建小型Shell程序的核心机制,特别是在进程控制、信号处理及作业管理方面的应用。实验的关键环节如下:
命令解析与执行逻辑定制:我首先开发了Builtin_Cmd()函数,该函数通过比对用户输入与内置命令列表,如quit、jobs、bg、fg,迅速执行对应操作或返回控制流。若非内置,则通过eval()函数处理。此函数负责解析用户输入,通过parseline()解析命令行,确定作业是前台(FG)还是后台(BG)执行。
进程与作业管理:针对作业执行,我实现了后台(&)命令的逻辑,允许作业在后台独立运行而不阻塞shell。利用fork()创建子进程,并通过setpgid确保子进程拥有独立进程组,避免后台作业接收前台信号干扰。addjob()管理作业状态,记录进程ID与作业ID,PID与JID的映射。
信号响应机制:我设计了信号处理器,如sigint_handler()与st_handler(),以响应SIGINT(Ctrl+C)和SIGTSTP(Ctrl+Z)信号。确保前台作业正确响应信号,后台作业不受影响。此外,sigchld_handler()确保僵死进程得以回收,通过waitpid()监控并清理。
作业控制命令实现:do_bgfg()和do_fg()内置命令,分别用于将作业从前台切换到后台或恢复到前台。通过getjobjid()检索作业信息,无论作业状态如何,bg命令将作业设为后台,fg则等待作业前台完成。
错误处理与测试:我进行了全面的测试,如通过trace文件模拟实际场景,如后台echo命令后跟&、jobs列出作业、以及fg与bg命令的交互,确保了作业控制逻辑的准确性。此外,我解决了子进程成为僵尸进程未回收的问题,确保了系统资源的有效管理。
通过本实验,不仅增强了对Unix Shell程序构建原理的深入理解,而且提升了信号处理、进程控制、作业管理及异常处理等实用技巧。实验成果体现在能够编写出一个具备基本功能的简化Shell,能有效处理用户命令、管理作业,以及正确响应信号,展现了良好的系统交互能力。
所有代码
/*
* tsh - A tiny shell program with job control
*
* <Put your name and login ID here>
*/
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <ctype.h>
#include <signal.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <errno.h>
/* Misc manifest constants */
#define MAXLINE 1024 /* max line size */
#define MAXARGS 128 /* max args on a command line */
#define MAXJOBS 16 /* max jobs at any point in time */
#define MAXJID 1<<16 /* max job ID */
/* Job states */
#define UNDEF 0 /* undefined */
#define FG 1 /* running in foreground */
#define BG 2 /* running in background */
#define ST 3 /* stopped */
/*
* Jobs states: FG (foreground), BG (background), ST (stopped)
* Job state transitions and enabling actions:
* FG -> ST : ctrl-z
* ST -> FG : fg command
* ST -> BG : bg command
* BG -> FG : fg command
* At most 1 job can be in the FG state.
*/
/* Global variables */
extern char **environ; /* defined in libc */
char prompt[] = "tsh> "; /* command line prompt (DO NOT CHANGE) */
int verbose = 0; /* if true, print additional output */
int nextjid = 1; /* next job ID to allocate */
char sbuf[MAXLINE]; /* for composing sprintf messages */
struct job_t { /* The job struct */
pid_t pid; /* job PID */
int jid; /* job ID [1, 2, ...] */
int state; /* UNDEF, BG, FG, or ST */
char cmdline[MAXLINE]; /* command line */
};
struct job_t jobs[MAXJOBS]; /* The job list */
/* End global variables */
/* Function prototypes */
/* Here are the functions that you will implement */
void eval(char *cmdline);
int builtin_cmd(char **argv);
void do_bgfg(char **argv);
void waitfg(pid_t pid);
void sigchld_handler(int sig);
void sigtstp_handler(int sig);
void sigint_handler(int sig);
/* Here are helper routines that we've provided for you */
int parseline(const char *cmdline, char **argv);
void sigquit_handler(int sig);
void clearjob(struct job_t *job);
void initjobs(struct job_t *jobs);
int maxjid(struct job_t *jobs);
int addjob(struct job_t *jobs, pid_t pid, int state, char *cmdline);
int deletejob(struct job_t *jobs, pid_t pid);
pid_t fgpid(struct job_t *jobs);
struct job_t *getjobpid(struct job_t *jobs, pid_t pid);
struct job_t *getjobjid(struct job_t *jobs, int jid);
int pid2jid(pid_t pid);
void listjobs(struct job_t *jobs);
void usage(void);
void unix_error(char *msg);
void app_error(char *msg);
typedef void handler_t(int);
handler_t *Signal(int signum, handler_t *handler);
/*
* main - The shell's main routine
*/
int main(int argc, char **argv)
{
char c;
char cmdline[MAXLINE];
int emit_prompt = 1; /* emit prompt (default) */
/* Redirect stderr to stdout (so that driver will get all output
* on the pipe connected to stdout) */
dup2(1, 2);
/* Parse the command line */
while ((c = getopt(argc, argv, "hvp")) != EOF) {
switch (c) {
case 'h': /* print help message */
usage();
break;
case 'v': /* emit additional diagnostic info */
verbose = 1;
break;
case 'p': /* don't print a prompt */
emit_prompt = 0; /* handy for automatic testing */
break;
default:
usage();
}
}
/* Install the signal handlers */
/* These are the ones you will need to implement */
Signal(SIGINT, sigint_handler); /* ctrl-c */
Signal(SIGTSTP, sigtstp_handler); /* ctrl-z */
Signal(SIGCHLD, sigchld_handler); /* Terminated or stopped child */
/* This one provides a clean way to kill the shell */
Signal(SIGQUIT, sigquit_handler);
/* Initialize the job list */
initjobs(jobs);
/* Execute the shell's read/eval loop */
while (1) {
/* Read command line */
if (emit_prompt) {
printf("%s", prompt);
fflush(stdout);
}
if ((fgets(cmdline, MAXLINE, stdin) == NULL) && ferror(stdin))
app_error("fgets error");
if (feof(stdin)) { /* End of file (ctrl-d) */
fflush(stdout);
exit(0);
}
/* Evaluate the command line */
eval(cmdline);
fflush(stdout);
fflush(stdout);
}
exit(0); /* control never reaches here */
}
/*
* eval - Evaluate the command line that the user has just typed in
*
* If the user has requested a built-in command (quit, jobs, bg or fg)
* then execute it immediately. Otherwise, fork a child process and
* run the job in the context of the child. If the job is running in
* the foreground, wait for it to terminate and then return. Note:
* each child process must have a unique process group ID so that our
* background children don't receive SIGINT (SIGTSTP) from the kernel
* when we type ctrl-c (ctrl-z) at the keyboard.
*/
void eval(char *cmdline)
{
char* argv[MAXARGS]; //execve()函数的参数
int state = UNDEF; //工作状态,FG或BG
sigset_t set;
pid_t pid; //进程id
// 处理输入的数据
if(parseline(cmdline, argv) == 1) //解析命令行,返回给argv数组
state = BG;
else
state = FG;
if(argv[0] == NULL) //命令行为空直接返回
return;
// 如果不是内置命令
if(!builtin_cmd(argv))
{
if(sigemptyset(&set) < 0)
unix_error("sigemptyset error");
if(sigaddset(&set, SIGINT) < 0 || sigaddset(&set, SIGTSTP) < 0 || sigaddset(&set, SIGCHLD) < 0)
unix_error("sigaddset error");
//在它派生子进程之前阻塞SIGCHLD信号,防止竞争
if(sigprocmask(SIG_BLOCK, &set, NULL) < 0)
unix_error("sigprocmask error");
if((pid = fork()) < 0) //fork创建子进程失败
unix_error("fork error");
else if(pid == 0) //fork创建子进程
{
// 子进程的控制流开始
if(sigprocmask(SIG_UNBLOCK, &set, NULL) < 0) //解除阻塞
unix_error("sigprocmask error");
if(setpgid(0, 0) < 0) //设置子进程id
unix_error("setpgid error");
if(execve(argv[0], argv, environ) < 0){
printf("%s: command not found\n", argv[0]);
exit(0);
}
}
// 将当前进程添加进job中,无论是前台进程还是后台进程
addjob(jobs, pid, state, cmdline);
// 恢复受阻塞的信号 SIGINT SIGTSTP SIGCHLD
if(sigprocmask(SIG_UNBLOCK, &set, NULL) < 0)
unix_error("sigprocmask error");
// 判断子进程类型并做处理
if(state == FG)
waitfg(pid); //前台作业等待
else
printf("[%d] (%d) %s", pid2jid(pid), pid, cmdline); //将进程id映射到job id
}
return;
}
/*
* parseline - Parse the command line and build the argv array.
*
* Characters enclosed in single quotes are treated as a single
* argument. Return true if the user has requested a BG job, false if
* the user has requested a FG job.
*/
int parseline(const char *cmdline, char **argv)
{
static char array[MAXLINE]; /* holds local copy of command line */
char *buf = array; /* ptr that traverses command line */
char *delim; /* points to first space delimiter */
int argc; /* number of args */
int bg; /* background job? */
strcpy(buf, cmdline);
buf[strlen(buf)-1] = ' '; /* replace trailing '\n' with space */
while (*buf && (*buf == ' ')) /* ignore leading spaces */
buf++;
/* Build the argv list */
argc = 0;
if (*buf == '\'') {
buf++;
delim = strchr(buf, '\'');
}
else {
delim = strchr(buf, ' ');
}
while (delim) {
argv[argc++] = buf;
*delim = '\0';
buf = delim + 1;
while (*buf && (*buf == ' ')) /* ignore spaces */
buf++;
if (*buf == '\'') {
buf++;
delim = strchr(buf, '\'');
}
else {
delim = strchr(buf, ' ');
}
}
argv[argc] = NULL;
if (argc == 0) /* ignore blank line */
return 1;
/* should the job run in the background? */
if ((bg = (*argv[argc-1] == '&')) != 0) {
argv[--argc] = NULL;
}
return bg;
}
/*
* builtin_cmd - If the user has typed a built-in command then execute
* it immediately.
*/
int builtin_cmd(char **argv)
{
if(!strcmp(argv[0], "quit")) //如果命令是quit,退出
exit(0);
else if(!strcmp(argv[0], "bg") || !strcmp(argv[0], "fg")) //如果是bg或者fg命令,执行do_fgbg函数
do_bgfg(argv);
else if(!strcmp(argv[0], "jobs")) //如果命令是jobs,列出正在运行和停止的后台作业
listjobs(jobs);
else
return 0; /* not a builtin command */
return 1;
}
/*
* do_bgfg - Execute the builtin bg and fg commands
*/
void do_bgfg(char **argv)
{
int num;
struct job_t *job;
// 没有参数的fg/bg应该被丢弃
if(!argv[1]){ //命令行为空
printf("%s command requires PID or %%jobid argument\n", argv[0]);
return ;
}
// 检测fg/bg参数,其中%开头的数字是JobID,纯数字的是PID
if(argv[1][0] == '%'){ //解析jid
if((num = strtol(&argv[1][1], NULL, 10)) <= 0){
printf("%s: argument must be a PID or %%jobid\n",argv[0]);//失败,打印错误消息
return;
}
if((job = getjobjid(jobs, num)) == NULL){
printf("%%%d: No such job\n", num); //没找到对应的job
return;
}
} else {
if((num = strtol(argv[1], NULL, 10)) <= 0){
printf("%s: argument must be a PID or %%jobid\n",argv[0]);//失败,打印错误消息
return;
}
if((job = getjobpid(jobs, num)) == NULL){
printf("(%d): No such process\n", num); //没找到对应的进程
return;
}
}
if(!strcmp(argv[0], "bg")){
// bg会启动子进程,并将其放置于后台执行
job->state = BG; //设置状态
if(kill(-job->pid, SIGCONT) < 0) //采用负数发送信号到进程组
unix_error("kill error");
printf("[%d] (%d) %s", job->jid, job->pid, job->cmdline);
} else if(!strcmp(argv[0], "fg")) {
job->state = FG; //设置状态
if(kill(-job->pid, SIGCONT) < 0) //采用负数发送信号到进程组
unix_error("kill error");
// 当一个进程被设置为前台执行时,当前tsh应该等待该子进程结束
waitfg(job->pid);
} else {
puts("do_bgfg: Internal error");
exit(0);
}
return;
}
/*
* waitfg - Block until process pid is no longer the foreground process
*/
void waitfg(pid_t pid)
{
struct job_t *job = getjobpid(jobs, pid);
if(!job) return;
// 如果当前子进程的状态没有发生改变,则tsh继续休眠
while(job->state == FG)
// 使用sleep的这段代码会比较慢,最好使用sigsuspend
sleep(1);
return;
}
/*****************
* Signal handlers
*****************/
/*
* sigchld_handler - The kernel sends a SIGCHLD to the shell whenever
* a child job terminates (becomes a zombie), or stops because it
* received a SIGSTOP or SIGTSTP signal. The handler reaps all
* available zombie children, but doesn't wait for any other
* currently running children to terminate.
*/
void sigchld_handler(int sig)
{
int status, jid;
pid_t pid;
struct job_t *job;
if(verbose)
puts("sigchld_handler: entering");
/*
以非阻塞方式等待所有子进程
waitpid 参数3:
1. 0 : 执行waitpid时, 只有在子进程 **终止** 时才会返回。
2. WNOHANG : 若子进程仍然在运行,则返回0 。
注意只有设置了这个标志,waitpid才有可能返回0
3. WUNTRACED : 如果子进程由于传递信号而停止,则马上返回。
只有设置了这个标志,waitpid返回时,其WIFSTOPPED(status)才有可能返回true
*/
while((pid = waitpid(-1, &status, WNOHANG | WUNTRACED)) > 0){
// 如果当前这个子进程的job已经删除了,则表示有错误发生
if((job = getjobpid(jobs, pid)) == NULL){
printf("Lost track of (%d)\n", pid);
return;
}
jid = job->jid;
//接下来判断三种状态
// 如果这个子进程收到了一个暂停信号(还没退出)
if(WIFSTOPPED(status)){
printf("Job [%d] (%d) stopped by signal %d\n", jid, job->pid, WSTOPSIG(status));
job->state = ST; //状态设为挂起
}
// 如果子进程通过调用 exit 或者一个返回 (return) 正常终止
else if(WIFEXITED(status)){
if(deletejob(jobs, pid))
if(verbose){
printf("sigchld_handler: Job [%d] (%d) deleted\n", jid, pid);
printf("sigchld_handler: Job [%d] (%d) terminates OK (status %d)\n", jid, pid, WEXITSTATUS(status));
}
}
// 如果子进程是因为一个未被捕获的信号终止的,例如SIGKILL
else {
if(deletejob(jobs, pid)){ //清除进程
if(verbose)
printf("sigchld_handler: Job [%d] (%d) deleted\n", jid, pid);
}
printf("Job [%d] (%d) terminated by signal %d\n", jid, pid, WTERMSIG(status)); //返回导致子进程终止的信号的数量
}
}
if(verbose)
puts("sigchld_handler: exiting");
return;
}
/*
* sigint_handler - The kernel sends a SIGINT to the shell whenver the
* user types ctrl-c at the keyboard. Catch it and send it along
* to the foreground job.
*/
void sigint_handler(int sig)
{
if(verbose)
puts("sigint_handler: entering");
pid_t pid = fgpid(jobs);
if(pid){
// 发送SIGINT给前台进程组里的所有进程
// 需要注意的是,前台进程组内的进程除了当前前台进程以外,还包括前台进程的子进程。
// 最多只能存在一个前台进程,但前台进程组内可以存在多个进程
if(kill(-pid, SIGINT) < 0)
unix_error("kill (sigint) error");
if(verbose){
printf("sigint_handler: Job (%d) killed\n", pid);
}
}
if(verbose)
puts("sigint_handler: exiting");
return;
}
/*
* sigtstp_handler - The kernel sends a SIGTSTP to the shell whenever
* the user types ctrl-z at the keyboard. Catch it and suspend the
* foreground job by sending it a SIGTSTP.
*/
void sigtstp_handler(int sig)
{
if(verbose)
puts("sigstp_handler: entering");
pid_t pid = fgpid(jobs);
struct job_t *job = getjobpid(jobs, pid);
if(pid){
if(kill(-pid, SIGTSTP) < 0)
unix_error("kill (tstp) error");
if(verbose){
printf("sigstp_handler: Job [%d] (%d) stopped\n", job->jid, pid);
}
}
if(verbose)
puts("sigstp_handler: exiting");
return;
}
/*********************
* End signal handlers
*********************/
/***********************************************
* Helper routines that manipulate the job list
**********************************************/
/* clearjob - Clear the entries in a job struct */
void clearjob(struct job_t *job) {
job->pid = 0;
job->jid = 0;
job->state = UNDEF;
job->cmdline[0] = '\0';
}
/* initjobs - Initialize the job list */
void initjobs(struct job_t *jobs) {
int i;
for (i = 0; i < MAXJOBS; i++)
clearjob(&jobs[i]);
}
/* maxjid - Returns largest allocated job ID */
int maxjid(struct job_t *jobs)
{
int i, max=0;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].jid > max)
max = jobs[i].jid;
return max;
}
/* addjob - Add a job to the job list */
int addjob(struct job_t *jobs, pid_t pid, int state, char *cmdline)
{
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid == 0) {
jobs[i].pid = pid;
jobs[i].state = state;
jobs[i].jid = nextjid++;
if (nextjid > MAXJOBS)
nextjid = 1;
strcpy(jobs[i].cmdline, cmdline);
if(verbose){
printf("Added job [%d] %d %s\n", jobs[i].jid, jobs[i].pid, jobs[i].cmdline);
}
return 1;
}
}
printf("Tried to create too many jobs\n");
return 0;
}
/* deletejob - Delete a job whose PID=pid from the job list */
int deletejob(struct job_t *jobs, pid_t pid)
{
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid == pid) {
clearjob(&jobs[i]);
nextjid = maxjid(jobs)+1;
return 1;
}
}
return 0;
}
/* fgpid - Return PID of current foreground job, 0 if no such job */
pid_t fgpid(struct job_t *jobs) {
int i;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].state == FG)
return jobs[i].pid;
return 0;
}
/* getjobpid - Find a job (by PID) on the job list */
struct job_t *getjobpid(struct job_t *jobs, pid_t pid) {
int i;
if (pid < 1)
return NULL;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].pid == pid)
return &jobs[i];
return NULL;
}
/* getjobjid - Find a job (by JID) on the job list */
struct job_t *getjobjid(struct job_t *jobs, int jid)
{
int i;
if (jid < 1)
return NULL;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].jid == jid)
return &jobs[i];
return NULL;
}
/* pid2jid - Map process ID to job ID */
int pid2jid(pid_t pid)
{
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].pid == pid) {
return jobs[i].jid;
}
return 0;
}
/* listjobs - Print the job list */
void listjobs(struct job_t *jobs)
{
int i;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid != 0) {
printf("[%d] (%d) ", jobs[i].jid, jobs[i].pid);
switch (jobs[i].state) {
case BG:
printf("Running ");
break;
case FG:
printf("Foreground ");
break;
case ST:
printf("Stopped ");
break;
default:
printf("listjobs: Internal error: job[%d].state=%d ",
i, jobs[i].state);
}
printf("%s", jobs[i].cmdline);
}
}
}
/******************************
* end job list helper routines
******************************/
/***********************
* Other helper routines
***********************/
/*
* usage - print a help message
*/
void usage(void)
{
printf("Usage: shell [-hvp]\n");
printf(" -h print this message\n");
printf(" -v print additional diagnostic information\n");
printf(" -p do not emit a command prompt\n");
exit(1);
}
/*
* unix_error - unix-style error routine
*/
void unix_error(char *msg)
{
fprintf(stdout, "%s: %s\n", msg, strerror(errno));
exit(1);
}
/*
* app_error - application-style error routine
*/
void app_error(char *msg)
{
fprintf(stdout, "%s\n", msg);
exit(1);
}
/*
* Signal - wrapper for the sigaction function
*/
handler_t *Signal(int signum, handler_t *handler)
{
struct sigaction action, old_action;
action.sa_handler = handler;
sigemptyset(&action.sa_mask); /* block sigs of type being handled */
action.sa_flags = SA_RESTART; /* restart syscalls if possible */
if (sigaction(signum, &action, &old_action) < 0)
unix_error("Signal error");
return (old_action.sa_handler);
}
/*
* sigquit_handler - The driver program can gracefully terminate the
* child shell by sending it a SIGQUIT signal.
*/
void sigquit_handler(int sig)
{
printf("Terminating after receipt of SIGQUIT signal\n");
exit(1);
}