文章目录
1. W25Q64
2. 硬件电路
3. 软件/硬件波形对比
4. STM32中的SPI外设
5. 代码实现
5.1 MyI2C.c
5.2 MyI2C.h
5.3 W25Q64.c
5.4 W25Q64.h
5.5 W25Q64_Ins.h
5.6 main.c
1. W25Q64
对于SPI通信和W25Q64的详细解析可以看下面这篇文章
STM32单片机SPI通信详解-CSDN博客
对于STM32通过SPI软件读写W25Q64的代码,可以看下面这篇文章
STM32通过SPI软件读写W25Q64-CSDN博客
W25Qxx系列是一种低成本、小型化、使用简单的非易失性存储器,常应用于数据存储、字库存储、固件程序存储等场景
存储介质:Nor Flash(闪存)
时钟频率:80MHz / 160MHz (Dual SPI) / 320MHz (Quad SPI)
存储容量(24位地址):
W25Q40: 4Mbit / 512KByte
W25Q80: 8Mbit / 1MByte
W25Q16: 16Mbit / 2MByte
W25Q32: 32Mbit / 4MByte
W25Q64: 64Mbit / 8MByte
W25Q128: 128Mbit / 16MByte
W25Q256: 256Mbit / 32MByte
地址设计
- 地址位数:指用于寻址的二进制位数。在计算机系统中,每个内存单元都有一个唯一的地址,通过地址可以访问和引用内存中的数据或指令。
- 地址总线:用于地址传输的总线。W25Q64 的 24 位地址总线意味着它可以访问 2^24 个地址,即 16,777,216 个字节(16MB)的空间。
- 地址位数与存储容量:地址位数越多,能寻址的存储空间越大。例如,8 位地址可以寻址 256 个字节,16 位地址可以寻址 65,536 个字节(64KB)。
W25Q64 的存储空间
- 存储容量:W25Q64 具体的存储容量为 64Mbit,即 8MB,但其地址总线的设计可以支持更大的寻址空间。
- 数据组织:存储器通常按字节组织,每个字节有唯一的地址。W25Q64 可以通过 24 位地址总线访问每个字节,这使得数据读写操作更加灵活和高效。
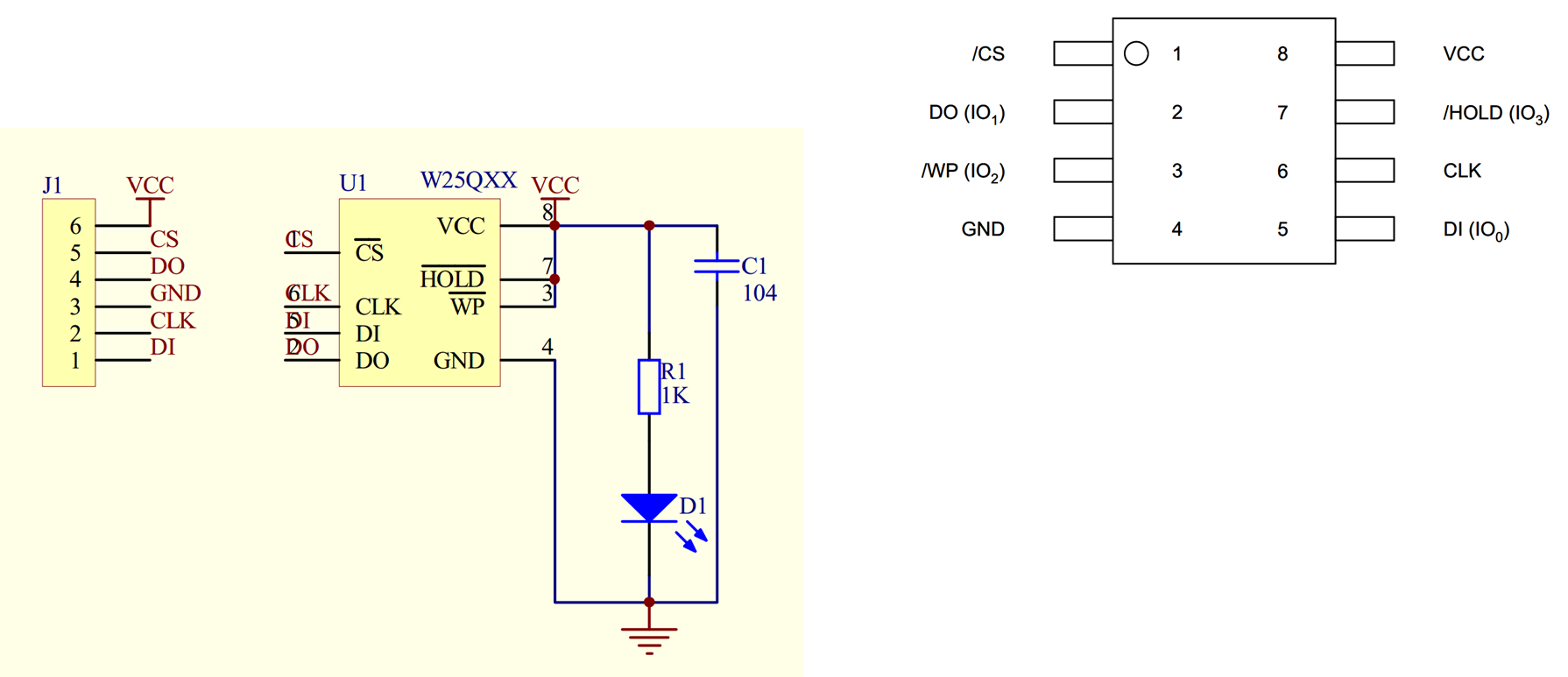
2. 硬件电路
| 引脚 | 功能 |
| VCC、GND | 电源(2.7~3.6V) |
| CS(SS) | SPI片选 |
| CLK(SCK) | SPI时钟 |
| DI(MOSI) | SPI主机输出从机输入 |
| DO(MISO) | SPI主机输入从机输出 |
| WP | 写保护 |
| HOLD | 数据保持 |
WP(Write Protect):写保护
WP 引脚用于实现硬件写保护功能。WP 引脚为低电平时,写保护有效,无法进行写操作;WP 引脚为高电平时,可以进行写操作。
HOLD:数据保持
HOLD 引脚为低电平时,芯片进入保持状态。当在进行正常的读写操作时,如果需要中断 SPI 通信以操作其他设备,可以将 HOLD 引脚置为低电平。此时,芯片会保持当前状态但释放总线控制权。这样可以在不中断当前操作的前提下,使用 SPI 总线与其他设备通信。操作完毕后,将 HOLD 引脚置为高电平,芯片将恢复并继续之前的操作。这个功能允许在不终止总线操作的情况下,实现 SPI 总线的中断处理。
3. 软件/硬件波形对比


硬件数据波形变化紧贴SCK边沿 软件数据变化在边沿后有些延迟。
I2C:SCL低电平期间数据变化,高电平期间数据采样 SPI:SCK下降沿数据移出,上升沿数据移入。 两者最终波形的表现形式都是一样的,无论是下降沿变化还是低电平期间变化,它们都 是一个意思,都可以作为数据变化的时刻。
4. STM32中的SPI外设
STM32内部集成了硬件SPI收发电路,可以由硬件自动执行时钟生成、数据收发等功能,减轻CPU的负担,可配置8位/16位数据帧、高位先行/低位先行
时钟频率: fPCLK / (2, 4, 8, 16, 32, 64, 128, 256)
支持多主机模型、主或从操作
可精简为半双工/单工通信
支持DMA
兼容I2S协议
STM32F103C8T6 硬件SPI资源:SPI1、SPI2
5. 代码实现
硬件SPI读写W25Q64
硬件SPI配置步骤
在软件读写I2C的基础上进行改写,以适应硬件读写SPI的需求。以下是详细步骤:
- 保留SS引脚的GPIO软件模拟:使用GPIO软件模拟保留SS(Slave Select)引脚的功能。
- 初始化SPI外设:配置SPI外设的相关参数。
- 交换一个字节的操作流程:具体操作流程如下:
- 开启SPI和GPIO时钟:确保SPI外设和GPIO端口的时钟已开启。
- 初始化GPIO端口:
- SCK和MOSI:这些是由硬件外设控制的输出信号,需要配置为复用推挽输出模式。
- MISO:这是硬件外设的输入信号,需要配置为上拉输入模式。由于输入设备可以有多个,因此不存在复用输入的情况。普通GPIO口和外设都可以进行输入操作。
- SS引脚:这是由软件控制的输出信号,需要配置为通用推挽输出模式。
- 配置SPI外设:使用结构体对SPI外设进行配置,设定相应的参数。
- 开关控制:使用
SPI_Cmd函数来开启或关闭SPI外设。
5.1 MyI2C.c
#include "stm32f10x.h" // Device header
/**
* 函 数:SPI写SS引脚电平,SS仍由软件模拟
* 参 数:BitValue 协议层传入的当前需要写入SS的电平,范围0~1
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SS为低电平,当BitValue为1时,需要置SS为高电平
*/
void MySPI_W_SS(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue); //根据BitValue,设置SS引脚的电平
}
//SPI初始化
void MySPI_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //开启SPI1的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4引脚初始化为推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA5和PA7引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入
/*SPI初始化*/
SPI_InitTypeDef SPI_InitStructure; //定义结构体变量
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //模式,选择为SPI主模式
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //方向,选择2线全双工
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //数据宽度,选择为8位
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //先行位,选择高位先行
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //波特率分频,选择128分频
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //SPI极性,选择低极性
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //SPI相位,选择第一个时钟边沿采样,极性和相位决定选择SPI模式0
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS,选择由软件控制
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC多项式,暂时用不到,给默认值7
SPI_Init(SPI1, &SPI_InitStructure); //将结构体变量交给SPI_Init,配置SPI1
/*SPI使能*/
SPI_Cmd(SPI1, ENABLE); //使能SPI1,开始运行
/*设置默认电平*/
MySPI_W_SS(1); //SS默认高电平
}
//SPI起始
void MySPI_Start(void)
{
MySPI_W_SS(0); //拉低SS,开始时序
}
//SPI终止
void MySPI_Stop(void)
{
MySPI_W_SS(1); //拉高SS,终止时序
}
/**
* 函 数:SPI交换传输一个字节,使用SPI模式0
* 参 数:ByteSend 要发送的一个字节
* 返 回 值:接收的一个字节
*/
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != SET); //等待发送数据寄存器空
SPI_I2S_SendData(SPI1, ByteSend); //写入数据到发送数据寄存器,开始产生时序
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != SET); //等待接收数据寄存器非空
return SPI_I2S_ReceiveData(SPI1); //读取接收到的数据并返回
}
5.2 MyI2C.h
#ifndef __MYSPI_H
#define __MYSPI_H
void MySPI_Init(void);
void MySPI_Start(void);
void MySPI_Stop(void);
uint8_t MySPI_SwapByte(uint8_t ByteSend);
#endif
5.3 W25Q64.c
#include "stm32f10x.h" // Device header
#include "MySPI.h"
#include "W25Q64_Ins.h"
//W25Q64初始化
void W25Q64_Init(void)
{
MySPI_Init(); //先初始化底层的SPI
}
/**
* 函 数:MPU6050读取ID号
* 参 数:MID 工厂ID,使用输出参数的形式返回
* 参 数:DID 设备ID,使用输出参数的形式返回
*/
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID)
{
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_JEDEC_ID); //交换发送读取ID的指令
*MID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收MID,通过输出参数返回
*DID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收DID高8位
*DID <<= 8; //高8位移到高位
*DID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE); //或上交换接收DID的低8位,通过输出参数返回
MySPI_Stop(); //SPI终止
}
//W25Q64写使能
void W25Q64_WriteEnable(void)
{
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_WRITE_ENABLE); //交换发送写使能的指令
MySPI_Stop(); //SPI终止
}
//W25Q64等待忙
void W25Q64_WaitBusy(void)
{
uint32_t Timeout;
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1); //交换发送读状态寄存器1的指令
Timeout = 100000; //给定超时计数时间
while ((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0x01) == 0x01) //循环等待忙标志位
{
Timeout --; //等待时,计数值自减
if (Timeout == 0) //自减到0后,等待超时
{
/*超时的错误处理代码,可以添加到此处*/
break; //跳出等待,不等了
}
}
MySPI_Stop(); //SPI终止
}
/**
* 函 数:W25Q64页编程
* 参 数:Address 页编程的起始地址,范围:0x000000~0x7FFFFF
* 参 数:DataArray 用于写入数据的数组
* 参 数:Count 要写入数据的数量,范围:0~256
* 注意事项:写入的地址范围不能跨页
*/
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count)
{
uint16_t i;
W25Q64_WriteEnable(); //写使能
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_PAGE_PROGRAM); //交换发送页编程的指令
MySPI_SwapByte(Address >> 16); //交换发送地址23~16位
MySPI_SwapByte(Address >> 8); //交换发送地址15~8位
MySPI_SwapByte(Address); //交换发送地址7~0位
for (i = 0; i < Count; i ++) //循环Count次
{
MySPI_SwapByte(DataArray[i]); //依次在起始地址后写入数据
}
MySPI_Stop(); //SPI终止
W25Q64_WaitBusy(); //等待忙
}
/**
* 函 数:W25Q64扇区擦除(4KB)
* 参 数:Address 指定扇区的地址,范围:0x000000~0x7FFFFF
* 返 回 值:无
*/
void W25Q64_SectorErase(uint32_t Address)
{
W25Q64_WriteEnable(); //写使能
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB); //交换发送扇区擦除的指令
MySPI_SwapByte(Address >> 16); //交换发送地址23~16位
MySPI_SwapByte(Address >> 8); //交换发送地址15~8位
MySPI_SwapByte(Address); //交换发送地址7~0位
MySPI_Stop(); //SPI终止
W25Q64_WaitBusy(); //等待忙
}
/**
* 函 数:W25Q64读取数据
* 参 数:Address 读取数据的起始地址,范围:0x000000~0x7FFFFF
* 参 数:DataArray 用于接收读取数据的数组,通过输出参数返回
* 参 数:Count 要读取数据的数量,范围:0~0x800000
* 返 回 值:无
*/
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count)
{
uint32_t i;
MySPI_Start(); //SPI起始
MySPI_SwapByte(W25Q64_READ_DATA); //交换发送读取数据的指令
MySPI_SwapByte(Address >> 16); //交换发送地址23~16位
MySPI_SwapByte(Address >> 8); //交换发送地址15~8位
MySPI_SwapByte(Address); //交换发送地址7~0位
for (i = 0; i < Count; i ++) //循环Count次
{
DataArray[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //依次在起始地址后读取数据
}
MySPI_Stop(); //SPI终止
}
5.4 W25Q64.h
#ifndef __W25Q64_H
#define __W25Q64_H
void W25Q64_Init(void);
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID);
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count);
void W25Q64_SectorErase(uint32_t Address);
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count);
#endif
5.5 W25Q64_Ins.h
#ifndef __W25Q64_INS_H
#define __W25Q64_INS_H
#define W25Q64_WRITE_ENABLE 0x06
#define W25Q64_WRITE_DISABLE 0x04
#define W25Q64_READ_STATUS_REGISTER_1 0x05
#define W25Q64_READ_STATUS_REGISTER_2 0x35
#define W25Q64_WRITE_STATUS_REGISTER 0x01
#define W25Q64_PAGE_PROGRAM 0x02
#define W25Q64_QUAD_PAGE_PROGRAM 0x32
#define W25Q64_BLOCK_ERASE_64KB 0xD8
#define W25Q64_BLOCK_ERASE_32KB 0x52
#define W25Q64_SECTOR_ERASE_4KB 0x20
#define W25Q64_CHIP_ERASE 0xC7
#define W25Q64_ERASE_SUSPEND 0x75
#define W25Q64_ERASE_RESUME 0x7A
#define W25Q64_POWER_DOWN 0xB9
#define W25Q64_HIGH_PERFORMANCE_MODE 0xA3
#define W25Q64_CONTINUOUS_READ_MODE_RESET 0xFF
#define W25Q64_RELEASE_POWER_DOWN_HPM_DEVICE_ID 0xAB
#define W25Q64_MANUFACTURER_DEVICE_ID 0x90
#define W25Q64_READ_UNIQUE_ID 0x4B
#define W25Q64_JEDEC_ID 0x9F
#define W25Q64_READ_DATA 0x03
#define W25Q64_FAST_READ 0x0B
#define W25Q64_FAST_READ_DUAL_OUTPUT 0x3B
#define W25Q64_FAST_READ_DUAL_IO 0xBB
#define W25Q64_FAST_READ_QUAD_OUTPUT 0x6B
#define W25Q64_FAST_READ_QUAD_IO 0xEB
#define W25Q64_OCTAL_WORD_READ_QUAD_IO 0xE3
#define W25Q64_DUMMY_BYTE 0xFF
#endif
5.6 main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "W25Q64.h"
uint8_t MID; //定义用于存放MID号的变量
uint16_t DID; //定义用于存放DID号的变量
uint8_t ArrayWrite[] = {0x01, 0x02, 0x03, 0x04}; //定义要写入数据的测试数组
uint8_t ArrayRead[4]; //定义要读取数据的测试数组
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
W25Q64_Init(); //W25Q64初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "MID: DID:");
OLED_ShowString(2, 1, "W:");
OLED_ShowString(3, 1, "R:");
/*显示ID号*/
W25Q64_ReadID(&MID, &DID); //获取W25Q64的ID号
OLED_ShowHexNum(1, 5, MID, 2); //显示MID
OLED_ShowHexNum(1, 12, DID, 4); //显示DID
/*W25Q64功能函数测试*/
W25Q64_SectorErase(0x000000); //扇区擦除
W25Q64_PageProgram(0x000000, ArrayWrite, 4); //将写入数据的测试数组写入到W25Q64中
W25Q64_ReadData(0x000000, ArrayRead, 4); //读取刚写入的测试数据到读取数据的测试数组中
/*显示数据*/
OLED_ShowHexNum(2, 3, ArrayWrite[0], 2); //显示写入数据的测试数组
OLED_ShowHexNum(2, 6, ArrayWrite[1], 2);
OLED_ShowHexNum(2, 9, ArrayWrite[2], 2);
OLED_ShowHexNum(2, 12, ArrayWrite[3], 2);
OLED_ShowHexNum(3, 3, ArrayRead[0], 2); //显示读取数据的测试数组
OLED_ShowHexNum(3, 6, ArrayRead[1], 2);
OLED_ShowHexNum(3, 9, ArrayRead[2], 2);
OLED_ShowHexNum(3, 12, ArrayRead[3], 2);
while (1)
{
}
}